
基于LabVIEW的冷原子干涉仪精密时序控制系统*
2022-11-09 07:27刘夏鸣
舰船电子工程 2022年8期
刘夏鸣
(华中光电技术研究所-武汉光电国家研究中心 武汉 430223)
1 引言
20世纪90年代美国斯坦福大学S.Chu小组研制了首个冷原子干涉仪[1],并实现了绝对重力加速度测量,受到国际同行的广泛关注。经过30年的快速发展,冷原子干涉技术已应用于重力加速度[1~3]、重力梯度[3~6]等物理量的精密测量以及等效原理检验[7~9]、引力波探测[10]等基础物理研究,在重力基准网络建设、资源勘探、地球物理学研究、惯性导航等领域展现出非常重要的应用价值。华中科技大学胡忠坤小组的冷原子重力仪测量灵敏度达到[2],是目前测量灵敏度最高的绝对重力仪;法国Muquans的小型可搬运冷原子重力梯度仪已实现绝对重力加速度和重力梯度同步测量,重力加速度和重力梯度的测量分辨率分别达到0.5μGal和 0.15E[3];美国斯坦福大学的冷原子干涉仪将微观粒子检测等效原理的相对精度提升至10-12量级[7]。
冷原子干涉仪利用拉曼激光操控原子的量子态,形成物质波干涉效应,通过检验干涉条纹相位信息的变化测量各类物理量。一次干涉测量主要包括原子冷却与囚禁、原子初态制备、原子干涉操控、干涉信号探测、数据处理等五大步骤,需要精确操控激光频率、激光功率、三维磁场等上百个参数的数值和持续时间,各通道参数的时间同步精度要求达到100ns量级。为满足冷原子干涉仪精密测量绝对重力加速度的需求,本文基于LabVIEW图形化编程语言和NI公司的多功能DAQ数据采集板卡开发了一套冷原子干涉仪精密时序控制系统,具有数据输入输出通道时间同步性好、操作界面直观易懂、集成度高、维护性好等特点[11~14]。
2 总体设计方案
如图1所示,冷原子干涉仪主要由敏感单元、激光系统、电气系统和精密时序控制系统组成。精密时序控制系统主要由LabVIEW控制程序以及PXIe主机、NI-DAQ设备、NI-GPIB设备等硬件组成。在LabVIEW程序控制下,NI-DAQ设备产生大小和时间精确控制的模拟输出信号和数字输出信号,控制激光系统和电气系统产生满足需求的射频/微波信号、磁场信号以及各类激光;NI-GPIB设备为任意函数发射器、精密电源等可编程设备实时提供配置参数与指令;干涉信号、激光功率等输入信号通过模拟输入信号通道上传到控制系统,完成数据解析、反馈控制、显示、存储等操作。

图1 冷原子干涉仪控制系统结构图
根据冷原子干涉仪的技术方案,控制系统需要提供的主要数据采集/输出通道如表1所示。因此,本控制系统的硬件配置如下:

表1 数据采集/输出通道需求情况
1)控制主机采用PXIe-1082,具有3个PXIe插槽和4个可兼容PXIe总线与PXI总线的混合插槽,每个插槽的传输速度高达1GB/s。
2)采用一块PXIe-6739数据采集/输出板卡和一块PXIe-6356数据采集/输出板卡。PXIe-6739具有64路16位模拟输出通道和20路数字输入/输出通道,最多可以并行输出16路带宽达到1MHz的模拟信号;PXIe-6356具有2路16位模拟输出通道、8路16位差分模拟输入通道和24路数字输入/输出通道,模拟输入通道的带宽最大可达1.2MHz,模拟输出通道的带宽最大可达3.3MHz。
3 控制程序设计
3.1 工作流程及时序编排
冷原子干涉仪控制程序工作流程如图2所示,各组件和设备正常上电后,启动控制程序并完成参数配置,然后启动执行程序使原子干涉仪循环工作,并在每个测量周期实时处理、显示和存储测量数据。

图2 冷原子干涉仪控制程序工作流程图
如前所述,冷原子干涉仪主要包括五大步骤,每个步骤又可细分为多个小步骤,并且每个小步骤可能包含多个参数的变化。例如,原子冷却与囚禁过程可细分为多普勒冷却与偏振梯度冷却两个小过程,且偏振梯度冷却过程又包含多个更小的过程。典型的偏振梯度冷却过程冷却光频率与功率变化如图3所示,首先在t1时间段线性减小冷却光频率,然后在t2~t6时间段按照不同的斜率依次减小冷却光的功率。为满足上述复杂的参数与时序变化需求,本系统按照“事件最小化”原则设计时序结构,即将冷原子干涉仪单测量周期内的任何一个参数变化都定义为一个“事件”,每个事件对应一个状态和一段持续时间,例如图3所示偏振梯度冷却过程包含6个事件,定义为6个状态,持续时间依次为t1、t2、…、t6。

图3 偏振梯度冷却过程冷却激光频率与功率变化示意图
3.2 模拟输出信号与数字输出信号生成方法
如表1所示,精密时序控制系统需要生成多路模拟电压信号和数字信号,用于控制激光频率、磁场大小等参数及为数据采集等操作提供触发信号。
数字信号只有高、低两个状态,可直接用数字“0”和“1”表示。数字信号生成方法如图4所示,前面板有三个输入参数,分别是“时间数组”、“数值数组”和“数据采样率”,其中时间数组和数值数组均为一维数组。时间数组中每一个值代表一个事件的持续时间,数值数组中每一个值代表这个时间段内数字信号的高/低特性。程序框图如图4右图所示,内层For循环结构将每一个事件生成一个1×n的一维数组,n是该事件的持续时间与采样率的乘积,再通过外层For循环结构和移位寄存器将所有事件的数组串联成一个一维数组,最后通过“模数转换”VI将模拟的数字“0”和“1”转换为数字信号。
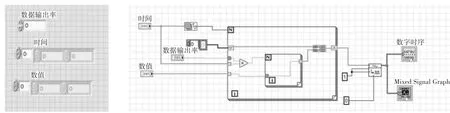
图4 数字信号生成程序框图
模拟信号比数字信号复杂,典型的模型信号可以分为三类:第一类是输出电压值不变或跳变;第二类是输出电压值在部分事件过程线性变化;第三类是输出电压值在部分事件过程非线性变化。根据参考文献[15],第一类和第二类模拟电压信号可以用图5所示方法产生。与数字信号类似,其前面板有三个输入参数,分别是时间数组、数值数组和采样率,其中时间数组是一维数组,数值数组是二维数组。数值数组中每一个事件中的上下两个数字分别表示这个事件持续过程中起始电压值和终止电压值。程序框图如图5右图所示,内层For循环结构将每一个事件生成一个1×n的一维数组,n是该事件的持续时间与设置的采样率的乘积,该数组的值计算方法如参考文献[15]所示:

其中,a0和an-1分别是该事件过程的起始电压值和终止电压值。
对于第三类模拟信号,需要根据每个事件对应的非线性电压信号特征采用对应的函数生成数据,然后再与图5所示方法生成的数据组合成新的一维数组。
3.3 数据同步输出方法
高精度冷原子干涉仪需要精确同步不同数据采集卡输出的各路模拟信号和数字信号。
1)单张数据采集卡的模拟/数字信号同步
单张数据采集卡输出的多路模拟信号和数字信号的同步方法如图6所示。第一,多个模拟输出信号之间的同步方法如图6左上角虚线方框内所示,将3路模拟输出信号AO1、AO2、AO3分别按照图5所示方法生成3个长度相同的一维数组,再通过“创建数组”函数将上述3个一维数组组合成一个二维数组,实现3个模拟输出通道的同步。第二,多路数字输出信号的同步方法与此类似,如图6左下角虚线方框内所示。第三,数字输出信号与模拟输出信号之间的同步方法如图6左下角椭圆形虚线框所示,将模拟输出信号和数字输出信号的“DAQmx定时”VI的“源接线端”连接到相同的时钟源。
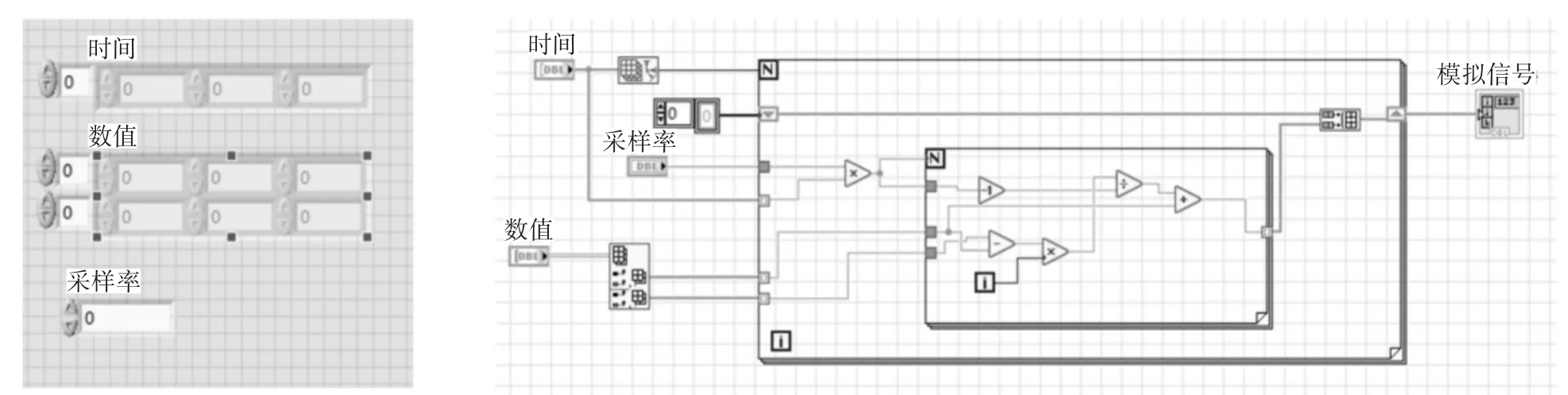
图5 模拟信号生成程序框图
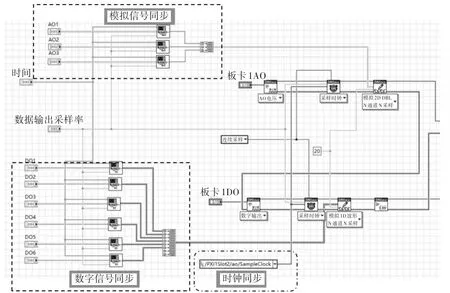
图6 单张数据采集卡的模拟/数字信号同步方法
2)不同数据采集卡的时钟同步
不同数据采集卡之间的时钟同步方法如图7所示,将所有数据采集卡模拟输出信号和数字输出信号的“DAQmx定时”VI的“源接线端”连接到相同的时钟源。此外,为了实现不同数据采集卡共享一个时钟源,在硬件上需要将各数据采集卡通过RTSI总线连接。

图7 不同数据采集卡的时钟同步方法
3.4 程序循环运行方法
原子干涉仪需要实现长时间连续测量,因此需要设计一套循环测量的程序。LabVIEW有多种实现循环运行的方法,最简单的方法是将程序主体全部放置在For循环或While循环结构内部,每次循环都全部执行循环结构体内所有程序内容。由于原子干涉程序在干涉测量前的参数配置阶段有大量的数据计算过程,会占用大量时间,如果将这一部分内容全部放置在循环结构内部,将导致前一次测量与后一次测量之间存在不确定的时间延迟。
图8为本文设计的原子干涉仪循环运行程序框图,采用“While循环”结构。在图8中将参数配置程序放置在“While循环”结构外部,通过“DAQmx任务开始”VI(图8中方形虚线框内图标)控制程序运行的开始。由于参数配置程序和“DAQmx任务开始”VI放置在“While循环”结构外,程序运行时只需要在第一个循环开始前完成参数配置,当程序执行了“DAQmx任务开始”VI后,只要While循环没有结束,配置的模拟输出数据和数字输出数据将不间断循环输出,有效解决了配置参数导致的时间延迟问题。

图8 原子干涉仪程序循环运行程序框图
为了实现不同数据采集卡输出数据的起始时间相同,本文采用控制“错误信息”传递路径的方法。如图8所示,各数据输出通道均共用数据采集卡1的时钟信号“ao/SampleClock”,“错误信息”传递的起点设置为数据采集卡1模拟输出通道的“DAQmx创建虚拟通道”VI(图8中六边形虚线框内图标),在依次经过“DAQmx定时”VI和“DAQmx写入”VI后,在图在椭圆形虚线框所示的A位置分为两路,分别流向数据采集卡2模拟输出通道和数据采集卡1数字输出通道,然后在B位置汇合,再经过控制数据采集卡1模拟输出通道的“DAQmx任务开始”VI进入While循环。通过上述设置,只有数据采集卡1的“DAQmx写入”VI执行完成后才会执行数据采集卡2和3的任务,并且由于数据采集卡1的“DAQmx任务开始”VI放置在数据采集卡2和3的“DAQmx任务开始”VI之后,因此三路通道会在相同时刻开始输出数据。
3.5 数据采集方法
原子干涉测量过程需要采集的原子干涉信号、激光功率信号等信息只发生在干涉过程的某一特特殊阶段,例如干涉信号的采集只发生在探测阶段。根据上述特征,为了少占用内存资源,本文采用触发采集方式,如图9所示,数据采集通道的“DAQmx触发”VI配置为数字触发模式,触发信号由数据采集卡1产生的数字信号通过数据采集卡1的PFI端口输入,“DAQmx定时”VI配置为有限采样模式,采集的数据量等于前面板参数“数据采样率”与“数据采样时间”的乘积,采集的数据通过“写入带分隔符电子表格”VI存储为“txt”格式文件。

图9 数据采集程序框图
4 控制程序性能测试
4.1 程序控制界面设计
冷原子干涉仪控制程序前面板主要包括参数配置、数据显示两大功能,基本数据输入/输出通道与存储参数配置界面如图10所示。“数据输出速率”窗口配置各通道输出模拟信号与数字信号的速率,所有的输出通道共用一个时钟,并采用相同的数据输出率;“数据采集速率”窗口配置各通道采集模拟信号的速率,所有的输入通道采用相同的采样率。

图10 数据输入/输出通道与存储参数设置界面
模拟输出信号参数配置界面如图11所示,原子干涉过程共分为28个状态,状态数下面的“时间数组”内每个值表示该状态的持续时间,各模拟信号参数由一个二维数组表示。

图11 模拟输出信号参数配置界面
数字输出信号参数配置界面如图12所示,每个数字信号由一个一维数组表示,数组中的元素填写“0”或“1”,分别代表低电平和高电平。

图12 数字输出信号参数配置界面
4.2 程序性能测试
模拟输出信号与数字输出信号的同步性能测量结果如图13所示,其中模拟输出信号由PXIe-6739板卡产生,数字输出信号由PXIe-6356板卡产生。从图中可以看到数字信号的响应时间小于500ns,模拟信号响应时间小于2.5μs,模拟信号相对于数字信号的滞后小于100ns。

图13 数字信号与模拟信号同步性能测试
图14(a)是前面板设置的模拟输出通道参数,图14(b)是利用示波器实测的输出模拟信号,从图中可以看到输出的模拟信号与设定的参数吻合。

图14 模拟信号配置参数与实际输出的模拟输出信号
4.3 程序应用
冷原子干涉仪的工作原理类似于马赫-曾德激光干涉仪,如图15所示。原子在高真空环境中做自由落体运动,在t1=0、t2=T、t3=2T时刻分别用π/2、π、π/2拉曼激光脉冲作用于原子,改变原子的内部量子能态和外部动量态。第一个π/2脉冲使原子处于1态与2态的叠加态,并且在空间上将处于两个态的原子分开,相当于光学干涉仪中的分束镜;π脉冲使处于1态的原子转换为2态,处于2态的原子转换为1态,相当于光学干涉仪中的反射镜;第二个π/2脉冲使两个不同路径的原子产生干涉效应,相当于光学干涉仪中的合束。干涉完成后,通过探测处于1态或2态的原子布居数就能提取干涉信息。
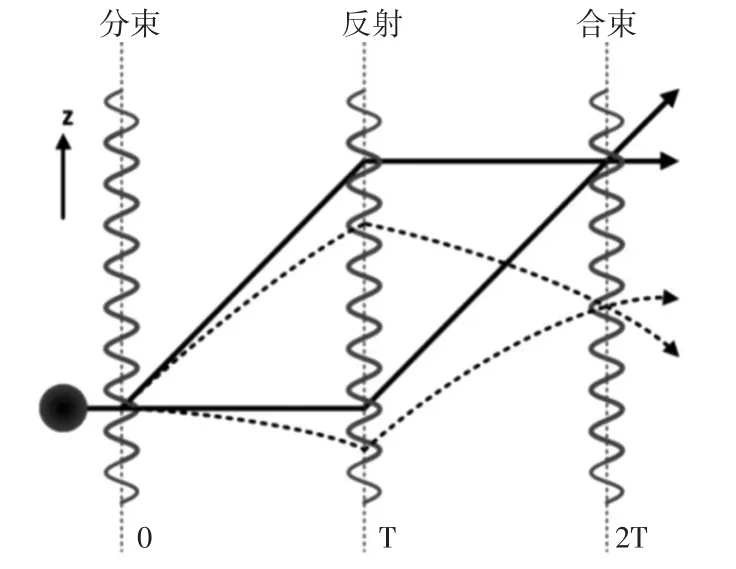
图15 冷原子干涉仪工作原理示意图
干涉条纹的相位信息Δφ与重力加速度g满足如下关系:

其中,Δφ0是三束激光拉曼激光初始时刻的相位差。
根据上述关系式,通过扫描第二个π/2脉冲的相位,可以获取正弦形式干涉条纹。实验测得T=80 ms的同向拉曼干涉条纹如图16所示。图中每个点均是单次测量的结果,干涉条纹的对比度约为43%。

图16 同向拉曼条纹
信号探测阶段探测到的原子数目P与干涉条纹相位Δφ以及条纹对比度C的关系为

5 结语
冷原子干涉技术将绝对重力加速度、重力梯度等惯性参量的测量方法从经典力学拓展到量子力学领域,并已逐步形成高精度、高可靠的产品,在资源勘探、地质灾害预警预报、惯性导航、基础物理研究等领域具有重大的潜在应用价值。本文采用LabVIEW图形化设计语言开发了一套时序同步精度高、集成度高的冷原子干涉仪精密时序控制系统,并为用户提供了良好的可视化界面,有效降低了原子干涉仪控制系统的复杂度和操控难度。
猜你喜欢
电脑报(2022年13期)2022-04-12
少儿科学周刊·儿童版(2021年22期)2021-12-11
少儿科学周刊·儿童版(2021年22期)2021-12-11
少儿科学周刊·儿童版(2021年22期)2021-12-11
电脑报(2020年24期)2020-07-15
电脑爱好者(2017年22期)2017-12-04
科技与创新(2016年21期)2017-02-14
成才之路(2016年27期)2016-09-30
中国高新技术企业(2015年24期)2015-06-25
初中生之友·中旬刊(2015年4期)2015-06-10
