
基于改进A*算法的无人机目标跟踪研究*
2022-11-09 07:27张鑫
舰船电子工程 2022年8期
张 鑫
(商洛学院电子信息与电气工程学院 商洛 726000)
1 引言
无人机(Unmanned Aerial Vehicle,UAV)是一种不搭载操作人员能够自主飞行或进行远程引导的航空器。针对无人机目标跟踪问题,国内外有较多研究。文献[1]针对部队转移掩护任务研究无人机跟踪转移部队的方法,该研究假设部队位置实时发送给无人机,即目标为合作目标,因此,无人机所要考虑的问题是如何保持指定距离跟踪转移部队。文献[2]把目标的状态估计引入到平台的运动控制策略中进行考虑,在对移动目标跟踪的同时,估计运动目标的状态,然后采用Lyapunov控制方法保持传感器对目标的持续覆盖。但这两种方法并没有充分考虑无人机的动力学约束。
本文考虑的是对地面/海面机动目标的视觉跟踪,这需要对机载摄像机拍摄的图像进行处理,识别目标并计算目标的参数信息。利用改进A*算法和文献[3]的跟踪算法进行了目标跟踪,通过仿真,验证了改进A*算法的可靠性。
2 无人机机动模型
机动目标的模型有很多,其中协同转弯模型[4]和“当前”统计模型[5]是两种目前最常用的机动目标运动模型,下面分别对这两种模型进行介绍。
1)协同转弯模型
设运动目标的状态方程为

式中:A为状态转移矩阵;X(k)为目标状态矢量,X(k)=[x(k)(k)y(k)(k)]T,x、y表示目标位置;B为噪声驱动矩阵;W为服从N(0,Q)的高斯白噪声,Q为协方差矩阵。
对于转移矩阵A及噪声驱动矩阵B分别有:

式中:T为采样时间/s;ω为运动角速度/(rad/s),代表机动情况的参数,ω>0表示左转弯,ω<0表示右转弯,ω=0则表示匀速直线运动。
2)“当前”统计模型
设目标运动的状态方程为

式中:X(k)为目标状态矢量,X(k)=[x(k)(k)(k)y(k)(k)(k)]T;Φ为状态转移矩阵;W(k)为白噪声序列,均值为0,方差为Q(k)。
对于状态转移矩阵Φ及白噪声序列方差Q(k)有:

式中:α为目标的机动频率。
3 航迹点规划方法
为了方便计算机解析,用航路点序列代替航路曲线[6~7]。无人机在固定高度定速飞行时,飞行轨迹从三维变为二维。图1表示此时的航迹点。
如图1所示,假设在t时刻,无人机所处位置为O,最大偏航角速率为ψ̇max。假设相邻航迹点的时间间隔为Δt,每个点有3种可能,则在3Δt内航路就有27种可能[8]。
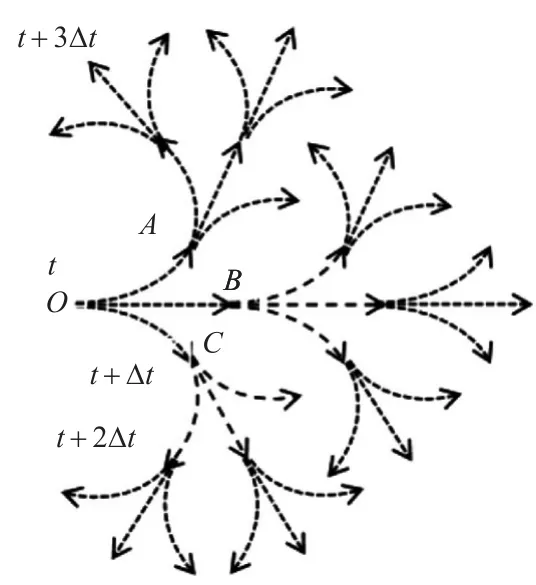
图1 航迹点扩展图
设无人机航迹点为(x,y,ψ),其中x,y表示二维平面位置,ψ表示偏航角。假设t时刻航迹点O为(x0,y0,ψ0),取Δt=1,那么航迹点A的状态信息为(x0-Rsinψ1+Rsinψ0,y0+Rcosψ1-Rcosψ0,ψ1),其中ψ1=ψ0-ψ̇Δt,R=V/ψ̇为无人机转弯半径,V为无人机的速度。同理,其他的扩展节点信息可以依次求得。
根据模型预测控制思想,航迹点的规划步骤如下:
1)当前t0时刻,以Δt为步长,规划以后N步最优航迹点序列;
2)实际航迹点用前K步规划的点代替,其中0<K<N;
3)t0+KΔt时继续进行1)、2),直到任务终止。
目标跟踪流程图如图2所示。

图2 目标跟踪流程图
步骤1)中需要获得最优的航迹点序列。若无人机在每个位置上都有M个可以选择的航向,规划N步,则会有MN条不同航路可供选择。步骤1)的任务就是在MN条路中找到最优的航路。和TSP问题的求解类似,基于对实时性的考虑,选择A*算法,该算法效率高、运行速度快。
4 改进A*算法求解航迹点序列
A*算法是一种启发式的最优搜索算法。评价函数定义为

式中:f(k)为从起始节点经过点k到目标节点的代价估计值;wg为真实代价的加权;g(k)为从起始节点到当前节点k的真实代价;wh为估计代价的加权;h(k)为从当前节点k到目标位置的代价估计值。

图3 A*算法流程图
若UAV在每个位置上都有M个可以选择的航向,规划N步,则扩展的航迹点共有∑Mi(1≤i≤N)个。设每个航迹点编码为[mn],其中m(1≤m≤N)表示扩展的第m步,n(1≤n≤Mm)表示第m步的第n个扩展节点。求最优航迹时将相应的航迹点编码加入Openlist、Closelist,只求出需要的航迹点的状态信息(x,y,ψ)。
A*算法[9]中的评价函数f(k)中包括消耗代价g(k)和估计代价h(k)。无危胁情况下,无人机在进行目标跟踪时,可以使g(k)=0。h(k)用来选择恰当的寻优方向,又被叫做启发函数[10]。因此,算法的可靠性和快速收敛性主要取决于h(k)。文献[3]直接将目标点与当前点间的欧氏距离看作h(k),对于目标跟踪的问题,h(k)设为

式中:ρi为航迹点序列中第i个航迹点与目标水平方向的距离;ρd为UAV与目标的水平期望距离。
但是随着迭代次数的增加,采用上式会使以后增加的节点代价值增大,算法无法快速收敛。因此,根据文献[11~12]设置h(k)为

5 无威胁环境下目标跟踪仿真
设定无人机的最大偏航角速度ψ̇max为0.2rad/s,速度是50m/s,飞行的高度1000m,北东地坐标系下的起始坐标为(0,0,-1000)。
跟踪目标参数:静止,北东地坐标系下坐标为(2000,2000,0)。
任务要求:UAV与目标水平方向的期望距离ρd=500m。无人机先飞向目标附近,距离为期望距离时再盘旋飞行。
航路规划算法相关参数设置如下:步长为1s,每次预规划3步,实际执行1步,每个航迹点有9个航向可以选择。分别对静止目标和机动目标进行跟踪。
采用改进A*算法进行仿真,并与文献[3]算法的仿真结果进行比较,对静止目标的跟踪结果如图4所示,对机动目标的跟踪结果如图5和图6所示。文献[3]的跟踪结果用虚线,改进A*算法的结果用实线表示。图4中,黑点表示静止实物,图5、6中,粗线表示机动目标。
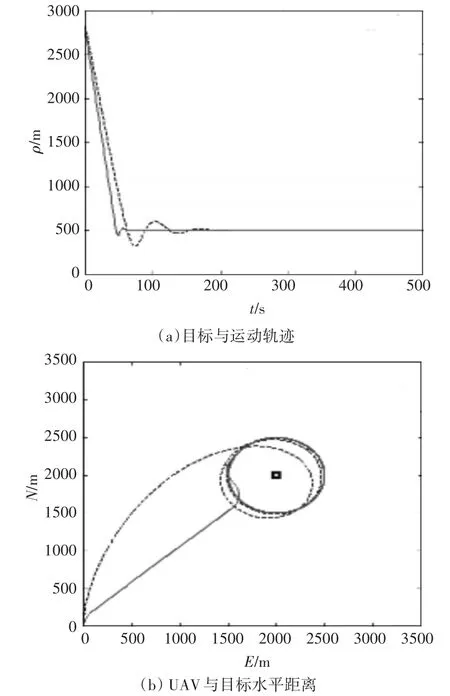
图4 静止目标的跟踪结果

图5 协调转弯模型下跟踪结果

图6 “当前”统计模型下跟踪结果
从图4中可以看出,两种算法都可以满足任务要求,但是本文算法比文献[3]能够更快地收敛至500m,且震荡较小,跟踪效果更优。
图5、6为协调转弯模型和“当前”统计模型下对机动目标的跟踪结果。由跟踪结果可知,本文算法与文献[3]中的算法相比收敛到期望距离的速度更快,并且目标产生了较大的机动时本文算法也能完成跟踪任务,偏差明显小于文献[3]中算法。
6 结语
首先分析了无人机的协同转弯模型和“当前”统计模型,在无危胁条件下,利用文献[5]的改进A*算法和文献[3]分别对静止目标和机动目标进行了跟踪,并进行了仿真对比。对比了两种算法下的目标轨迹与UVA运动轨迹,UVA与目标的水平距离。仿真结果表明,改进A*算法能有效地实现目标跟踪。
猜你喜欢
航空学报(2022年9期)2022-10-14
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
考试与评价·高二版(2021年1期)2021-09-10
无人机(2020年1期)2020-07-20
汉语世界(The World of Chinese)(2019年1期)2019-03-18
航海(2018年6期)2018-12-06
无人机(2018年2期)2018-09-10
兵器知识(2017年8期)2017-10-16
珠江水运(2015年11期)2015-07-24
