惯性组合导航系统性能评估方法研究进展
2022-11-08 01:48:06董铭涛程建华赵琳刘萍
自动化学报 2022年10期
董铭涛 程建华 赵琳 刘萍
惯性组合导航系统是以惯性导航系统(Inertial navigation system,INS)[1]为主,其他导航系统为辅的一类导航系统,能够充分利用多种信息源,是一种导航精度更高、可靠性更好的多功能系统[2],已广泛应用于船舶、潜器、各种飞行器及陆上车辆[3−5].惯性组合导航系统能够为其他系统提供各种导航信息,已成为必不可少的核心系统,支撑各类军民装备现代化.INS 输出参数的全面性、各参数误差传播的差异性、惯性组合导航系统的多样性、军民装备需求的多样性及应用环境的复杂性,使得惯性组合导航系统性能评估变得更加复杂.如何才能精确地评估不同系统的性能,是一个值得深入研究的课题.
通常,采用试验法评估惯性组合导航系统性能,然而,试验法存在费时和费力[6−7],当试验难以开展时无法评估[8−9]及无法评估定性指标[10]等问题.性能评估方法作为决策领域的方法,在方案排序或优选方面得到了广泛的应用[11−12],能够弥补试验法存在的不足.惯性组合导航系统性能评估作为性能评估领域的一类新问题,对性能评估方法提出了新要求.在指标体系、无量纲化方法、权重方法及评估方法等方面,都需要深入研究.
性能评估方法追求精确性主要有两个原因:1) 受追求客观性和唯一性思想影响;2) 受 “科学性”思想影响,认为精确是必然的[13].只有性能评估方法每个步骤都精确,才能保证结果精确性.已有的研究成果表明,不存在绝对精确的无量纲化方法和权重方法[14].但是,追求性能评估方法某些步骤的精确性,是可行的和合理的.
惯性组合导航系统具有多属性特点,研究过程中可以借鉴多属性决策领域的研究经验及研究成果.本文以惯性组合导航系统为研究对象,阐述惯性组合导航系统性能评估方法研究进展.本文结构安排如下: 首先,介绍惯性组合导航系统性能评估方法概述;其次,从指标体系、无量纲化方法、组合权重方法和评估方法四个方面展开,阐述惯性组合导航系统性能评估方法的四部分内容研究进展;最后,对惯性组合导航系统性能评估方法的未来研究方向进行了展望和总结.
1 惯性组合导航系统性能评估方法概述
1.1 性能评估方法概念分析
相比较于其他多属性问题,由于惯性组合导航系统自身的特点,导致性能评估概念和含义有所不同,有必要深入分析惯性组合导航系统性能评估方法的定义.本节内容从信息融合领域的性能评估方法、决策领域的性能评估方法及惯性组合导航系统性能评估方法三个方面展开,阐述性能评估方法概念.
1.1.1 信息融合领域的性能评估方法分析
在信息融合领域,性能评估方法定义为: 参照一定的标准,对评估对象的性能优劣进行评判比较的一种认知过程[15],主要有解析分析法、蒙特卡洛实验法、半实物仿真法及试验验证法,总结4种方法优缺点,如表1 所示.

表1 4种方法对比Table 1 Comparison of four methods
虽然上述方法也称为 “性能评估方法”,但其本质上属于系统性能的验证方法,主要用于验证定量指标,对于定性指标无能为力.考虑到军民装备需求的多样性及应用环境的复杂性,上述4种方法难以满足惯性组合导航系统性能评估要求.
1.1.2 决策领域的性能评估方法分析
除了信息融合领域的性能评估方法外,在决策领域中也有性能评估方法.调研文献可以发现,除了性能评估方法以外,还有两个概念与其很接近,分别为综合评价和多准则决策,三者经常容易混淆.现阶段尚无分析三者异同点的研究成果,因此,本文深入分析了三类方法的异同点.
评估是对所研究对象或系统的某个属性给予度量,并在此基础上进行判断[16].性能评估即为对系统性能进行综合评估.评价是按照预定的目标确定研究对象的属性,并把这种属性变为客观定量的计值或主观效用的行为[17].综合评价是对被评价对象进行客观、公正、合理的全面评价,实际问题大多都为多属性综合评价问题.对于决策的含义,有狭义和广义两种理解.狭义的含义为决策就是做出一种选择或决定;广义的含义为决策即是方案确定过程[18].多属性决策即为离散多准则决策,主要解决多个属性的有限决策方案排序或优选问题,主要特点为有限个方案.现阶段已有学者分析了三类方法中某两类方法的异同点,总结分析结果如表2 所示.
由表2 中分析结果可知,三类定义是相接近的,对于某些特殊的问题,三类定义是通用的.例如,惯性组合导航系统具有多属性特点,性能评估的目的是为了择优.因此,可以从三类方法中选择合适的方法,作为惯性组合导航系统的评估方法.

表2 两类方法分析Table 2 Analysis of two kinds of methods
1.1.3 惯性组合导航系统性能评估方法分析
惯性组合导航系统性能评估方法定义是研究工作开展的前提.惯性组合导航系统性能评估属于决策领域的新问题,同样也属于组合导航领域的新问题.在性能评估方法定义的基础上,文献[21−22] 提出组合导航系统性能评估方法定义.具体内容为:在相同情况下,将被评估组合导航系统输出数据,与标准系统数据进行比对,综合评判组合导航系统的工作稳定性和数据精确性.评估过程包含两个要求: 1) 标准系统和评估对象输入数据是相同的;2)预先采集载体运动轨迹作为标准轨迹[21].
上述定义仅考虑了组合导航系统的工作稳定性和数据精确性,调研文献发现,惯性组合导航系统综合性能可以总结为精度性能、可靠性、稳定性及由环境适应性等构成的使用性等.此定义无法满足惯性组合导航系统性能评估要求,因此,有必要提出惯性组合导航系统性能评估方法定义.惯性组合导航系统指标分为定量指标和定性指标,其中,精度性能、可靠性及稳定性为定量指标,使用性属于定性指标.
惯性组合导航系统性能评估方法定义为对待评估系统属性进行全面度量,度量方法是客观的、合理的,并在此基础上进行判断.待评估系统是指惯性组合导航系统,也可以是组合导航系统,甚至是导航系统.性能评估目标是全面评估系统综合性能,为决策者择优提供参考意见;评估结果可以是排序形式,也可以是定量数据形式.新定义实现途径为:对于定量指标而言,将待评估系统的输出数据,与实验室条件或试验测试条件下所获得最好结果相比较,综合评估系统的精度性能、可靠性及稳定性等;对于定性指标而言,邀请若干位组合导航领域专家,由各位专家意见,获得待评估系统指标值,选择指标值中最好的值作为参考值,综合评估系统使用性等.
由新定义可知,性能评估方法主要思想为将待评估系统与参考系统相比较,评估惯性组合导航系统性能.对于无法开展试验的情况,可以模拟试验生成参考数据来解决.性能评估方法能够利用专家经验评估定性指标,能够横向对比不同系统的性能评估结果,解决传统性能评估方法排序结果无法纵向对比不同方法结果的问题,因此,惯性组合导航系统性能评估方法能够解决试验法存在的不足.
1.2 惯性组合导航系统特殊性讨论
惯性组合导航系统性能评估属于交叉学科问题,需要分析惯性组合导航系统的特殊性.
1) 惯性组合导航系统主要由3 部分核心要素组成: INS、其他导航系统及滤波算法.INS 输出的导航信息包括位置、速度及姿态等,INS 主要误差为陀螺漂移、加速度计零偏、初始位置误差及初始速度误差等,导航信息与INS 主要误差不属于同一层级指标,因此,上述指标具有多属性、多指标及多层次等特点,都为定量指标.对于惯性组合导航系统而言,使用性、操作性及环境适应性等指标也需要被考虑,这些指标属于定性指标,因此,惯性组合导航系统具有多指标、指标具有多属性和多层次等特点,同时包含定量指标和定性指标.
2) 在导航系统中,位置单位为米或者海里,速度单位为米每秒,因此,导航指标具有不可公度性,无法直接开展性能评估,需要消除指标不可公度性.以陀螺漂移指标为例,当陀螺漂移精度由0.01°/h提高到0.001°/h 时,INS 精度会提高一个量级.当陀螺漂移精度由0.02°/h 提高到0.01°/h 时,INS 精度提升幅度与从0.03°/h 提高到0.02°/h 是一致的.因此,惯性组合导航系统指标既具有跨等级提升精度的特点,也具有等比例提升精度的特点.绘制惯性组合导航系统指标不可公度性示意图,如图1所示.需要说明的是,将陀螺漂移指标值转化为无量纲值后,没有单位,可以理解为单位为 “1”,因此纵轴无单位标识.在图1 指标不可公度性中,利用极值法表示陀螺漂移精度等比例变化特点,利用非线性无量纲化方法表示陀螺漂移精度跨等级提升精度特点.
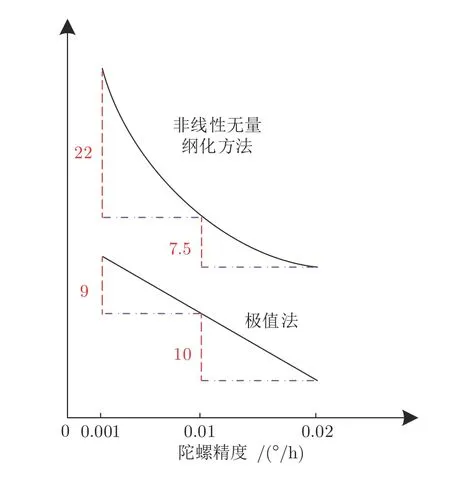
图1 指标不可公度性Fig.1 The incommensurability of the indexes
3) 惯性组合导航系统指标具有模糊性.模糊性的含义为: 客观事物的差异在中介过渡中所呈现的“亦此亦彼”性,表现为排中律的缺陷,造成事物的边界不清晰(尽管结果已知)[23].假设INS 要求陀螺漂移精度优于0.001°/h,即0.001°/h 是容许的,而0.0011°/h 是不容许的.但是,两者对导航精度的影响并不是很大,本质上并无区别.从容许到不容许的过程中,实际上有一中介过渡阶段.若要考虑这一中介情况,那么陀螺漂移精度边界变得不清晰,因此,陀螺漂移指标具有模糊性.
4) 惯性组合导航系统指标具有粗糙性.粗糙性是指由于当前阶段掌握的信息不足,造成概念刻画的不明确,这种不明确性会随着时间推移和信息增加而消失[24].需要注意的是,其与模糊性之间的区别.模糊性是无法给出清晰准确的界限而产生的不确定性,不会随着时间推移而消失.在INS 中,陀螺性能受温度影响,当外界温度超出陀螺工作温度范围时,会影响陀螺性能,进而对系统输出导航参数产生影响,现阶段还无法明确温度对惯性组合导航系统性能的影响程度.随着科学技术不断发展和人类对惯性组合导航系统的认识不断加深,将来会研究出温度对系统性能的影响,以及其他现阶段还无法准确描述的指标关系.
1.3 惯性组合导航系统与性能评估方法关系分析
性能评估方法主要由指标体系、无量纲化方法、权重方法及评估方法等内容组成[16],主要的4 部分内容间关系如图2 所示,分别对应图2 中a)~d).性能评估方法4 部分内容与惯性组合导航系统间关系如下:
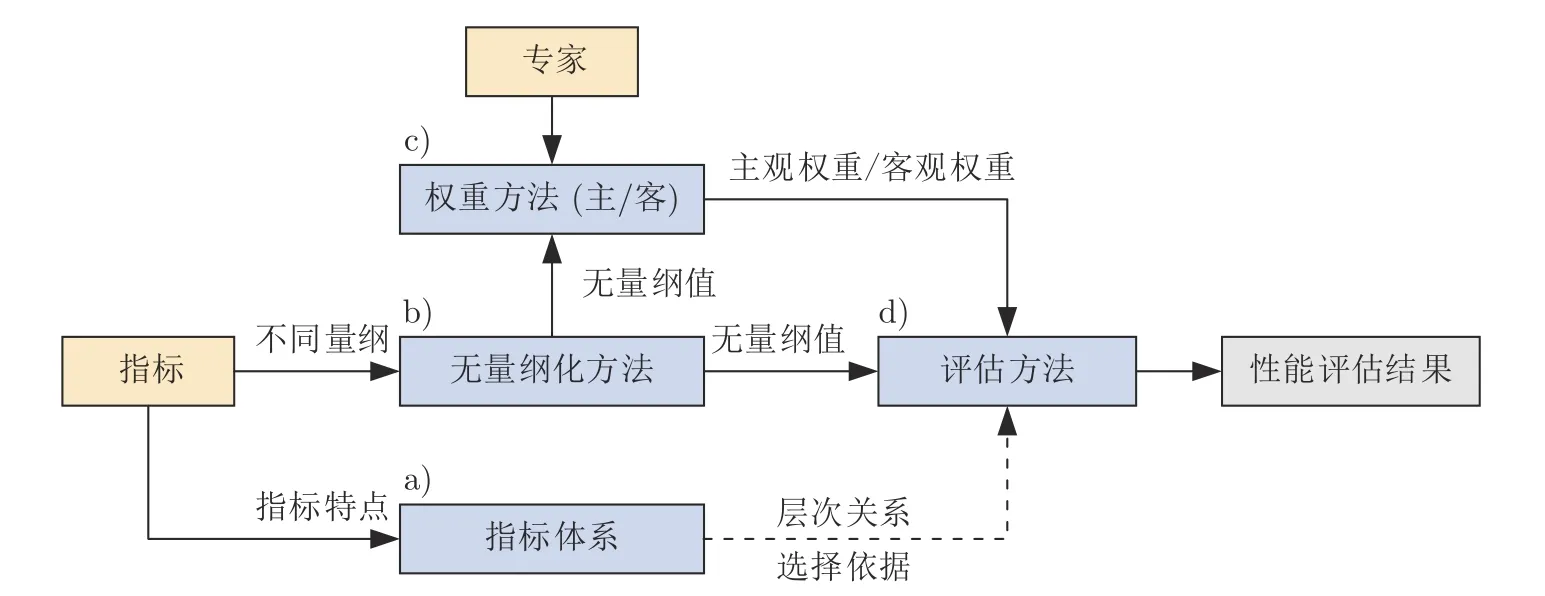
图2 性能评估方法各部分内容关系Fig.2 The relationship of each part of performance evaluation method
1) 惯性组合导航系统具有多属性和多指标的特点,且指标间具有层次关系,指标体系不是由各部分指标体系简单组合而成,需要研究惯性组合导航系统指标体系.
2) 导航指标具有不可公度性,需要无量纲化.极值法特点为指标值与无量纲值间呈等比例关系,非线性无量纲化方法特点为指标值变化速率不为定值,现阶段尚无适用于导航指标特殊性的无量纲化方法.
3) 通常,利用组合权重法解决单一权重方法存在的不足,然而,传统组合权重方法的组合系数根据实际问题设定,求解精度低,解决方法为建立组合权重优化模型.在组合权重优化模型中,常常会具有非线性、包含等式约束等特点,如何准确求解组合系数是一个难点问题.
4) 评估方法主要思想为借助于数学方法,将指标值与权重值合成为一个整体评估值,评估方法的选择取决于指标体系和指标的特点.需要深入剖析惯性组合导航系统指标体系和指标的特点,指导选择合适的评估方法.
关系1)、关系2)和关系4)可以概括为: 由于惯性组合导航系统本身的特殊性,导致指标体系和无量纲化方法都难以适用,同时,由于惯性组合导航系统指标和指标体系的特殊性,对评估方法提出新的要求;关系3)可以概括为: 性能评估方法精确性对权重方法提出新的要求.
2 惯性组合导航系统指标体系研究进展
指标体系是开展惯性组合导航系统性能评估方法研究的基础.依据惯性组合导航系统指标特点建立指标体系,再由指标及指标体系的特点选择合适的评估方法.通常,指标体系需要遵循目的性、完备性、可操作性、独立性、显著性及动态性等6 个原则[25].
惯性组合导航系统是在多个子导航系统的基础上,利用滤波技术组合各系统的导航信息[26−28].从指标体系角度看,涉及到了单一导航系统、滤波算法及组合导航系统等方面的指标体系,因此,从这3个方面展开,阐述惯性组合导航系统指标体系研究进展.
2.1 单一导航系统指标体系分析
INS和全球导航卫星系统(Global navigation satellite system,GNSS)作为应用最为广泛两类导航系统,得到学者们广泛关注[29].因此,以INS和GNSS 为研究对象,阐述单一导航系统指标体系研究进展.
1) INS 指标体系
徐博等[30]从导航指标及可靠性、维修性、经济性等通用性指标角度,建立捷联惯性导航系统(Strapdown INS,SINS)多级指标体系.李军伟等[31]为解决SINS 测试过程中指标多、存在不确定性等问题,建立精度测试、稳定性测试及可靠性测试等通用指标为主的三级指标体系.
2) GNSS 指标体系
杨军[32]为了评估卫星导航系统综合性能,建立主要指标为导航定位能力、授时能力、军事作战能力、通信能力及测量测绘和气象保障能力的三级指标体系.安雪滢等[33]建立三级卫星系统效能评估指标体系,主要指标为对地侦察、大气探测、导航定位、环境监测、导航预警和地图测绘等.项磊等[34]为解决卫星面对多任务观测时,无法准确评估任务完成效能的问题,建立卫星评估指标体系,卫星效能指标主要为对地覆盖效能、任务规划效能及星地资源调度效能.
由上述分析结果可知,从不同角度出发,建立了多种指标体系,并不是所有的指标都可用于惯性组合导航系统.对于INS 而言,导航指标和可靠性指标可以使用,维修性指标属于惯性组合导航系统使用性指标范畴,也可以使用;经济性指标无法使用,其原因为在军民装备导航系统中,通常不从经济性角度建立指标体系.对于GNSS 而言,导航定位能力是需要重点考虑的指标,通讯能力也需要考虑,属于惯性组合导航系统使用性指标范畴.
2.2 滤波算法指标体系分析
由于表征滤波器性能指标都为定量指标,有利于研究滤波器性能评估方法,现阶段已有大量研究成果[35−38].
在深空导航领域,唐鹏[35]提出基于层次分析法(Analytic hierarchy process,AHP)的导航系统滤波性能评估方法.表征滤波性能的指标为精度、可用性、连续性、实时性及稳定性等指标.张薇[36]提出深空探测导航系统滤波性能评估方法,评估指标为精度、可用性、连续性和实时性等.程进伟等[37]设计卡尔曼滤波算法性能评估方法,主要评估指标为算法复杂度、滤波质量及算法稳定性,建立三层指标体系.赵欣等[38]提出基于模糊综合评估(Fuzzy comprehensive evaluation,FCE)的组合导航信息融合评估方法,信息融合指标为精度、实时性、稳定性及可靠性.Wang等[29]将表征融合算法的精度、实时性、稳定性及可用性等指标,扩展为复杂度、精度、有效程度(Effective extent)、容错性、收敛性和鲁棒性等指标,建立组合导航系统融合算法新指标体系.
在上述文献中,实时性、稳定性和可靠性指标都可用于惯性组合导航系统,精度指标本质上是表征惯性组合导航系统的精度性能,同样可以使用.
2.3 组合导航系统指标体系分析
在文献[38]滤波算法指标基础上,张志强[39]引入稳定性、使用性及可靠性等指标,建立了组合导航系统指标体系,存在无法评估跨极区和极区条件对系统性能影响的问题.陈晶等[40]仅考虑精度性能,建立惯导/重力匹配导航性能指标体系,设计阈值法和遍历法相结合的定量性能评估方法,存在指标不全面、指标体系较为简单等问题.翟峻仪[41]建立组合导航系统性能评估指标体系,其中,二级指标为惯性测量单元指标、INS 指标、GNSS 指标及GNSS/INS 指标,从实验测试的角度,选择合适的评估设备评估组合导航系统性能,仅包含定量指标,无法评估定性指标.
在文献[29]指标的基础上,Cheng等[10]将评估指标扩展为三大类: 精度指标、稳定性指标及使用性指标,并将以导航信息为主的指标扩展至器件层指标,建立INS/GNSS 组合导航系统四级指标体系,如图3 所示.然而,此指标体系无法评估跨极区和极区条件对系统精度性能影响.
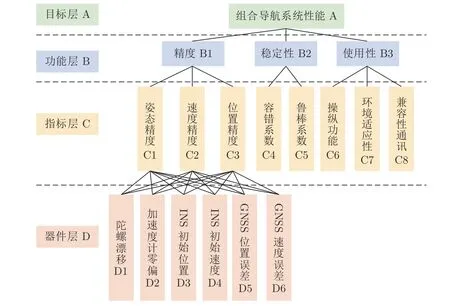
图3 INS/GNSS 组合导航系统指标体系Fig.3 The index system of INS/GNSS integrated navigation system
由上述分析内容可知,现有的组合导航系统指标体系还不全面,存在无法评估跨极区和极区条件对系统精度性能影响的问题.在各类军民装备中,最终目标是为了在全球范围内安全航行,需要考虑极区独特的环境,例如,跨极区和极区条件对导航性能的影响、高低温对陀螺仪性能的影响,以及极区条件下惯性组合导航系统的系统适应性等.
3 无量纲化方法研究进展
惯性组合导航系统输出的导航信息主要为位置精度、速度精度及姿态精度等,三者之间具有不可公度性,无法在同一维度评估精度性能,因此,无量纲化是惯性组合导航系统性能评估必不可少的操作.由第1.1 节惯性组合导航系统性能评估方法定义可知,由试验或实验室条件获得的数据,经无量纲化操作后,才能用于计算客观权重,因此,无量纲化方法对权重产生直接影响.本文从无量纲化方法分析和无量纲化方法对权重影响分析两个角度展开,阐述无量纲化方法研究进展.
3.1 无量纲化方法分析
朱孔来[42]指出指标值的变化对无量纲值的影响不是等比例,直线型处理方法不适用.将指数函数和模糊数学知识结合在一起,提出一种非线性无量纲化方法.夏高见[43]将无量纲化方法与百分制思想相结合,使得无量纲值更加符合人们思维习惯.受此文献思想的启发,Cheng等[10]将无量纲化方法与百分制思想相结合,针对极值法和指数函数法存在无法表达导航系统指标技术提升难度和精度提升速率等问题,提出一种导航系统混合无量纲化方法.其成本型指标无量纲化方法表达式如式(1) (见本页下方)所示.式(1)中,maxxi,minxi分别为指标值xi的最大值和最小值.无量纲值取值范围为[10,100]符合人们思维习惯.Xiong等[44]提出基于互无量纲的数据融合方法,无量纲化原始数据,采用支持向量机训练方法,有效地解决原有无量纲指标不完善导致故障诊断精度不高的问题.上述文献针对现有无量纲化方法在实际应用中存在不适用的问题,提出多种改进型无量纲化方法,可为深入研究无量纲化方法提供参考.
Duan等[45]研究无量纲化方法对价值评估中数据转化的影响,以线性加权法为例,通过实例分析,总结选择无量纲化方法的依据.Li等[46]研究多种无量纲化方法使用性问题,分析平均型和比例型指标无量纲化方法存在的不足,提出改进无量纲化方法.上述文献研究了无量纲化方法选择的问题,总结选择依据,指导选择合适的无量纲化方法.

3.2 无量纲化方法对权重的影响分析
糜万俊[47]指出无量纲化方法对属性方差产生影响进而影响权重,分析极差变换法、线性比例法及标准化处理法等无量纲化方法,揭示无量纲化方法对权重影响机制.江文奇[48]认为无量纲化方法对权重的影响是不确定的,不同无量纲化方法造成信息失真程度不同,研究了无量纲化方法对权重敏感性和保序性影响.高晓红等[49]认为线性无量纲化方法实质为对原始数据的平移或伸缩,或同时平移和伸缩,分析了线性无量纲化方法对主成分分析法权重的影响.总结文献中无量纲化方法对权重的影响,如表3 所示.
由表3 中内容可知,无量纲化方法直接影响方差或均方差,进而影响权重.不同的无量纲化方法对权重方法产生的影响也不同,在研究无量纲化方法时,需要考虑无量纲化方法对权重的影响,及对性能评估结果的双重影响.

表3 无量纲化方法对权重的影响Table 3 Influence of dimensionless method on weights
4 组合权重方法研究进展
权重反映各指标在评估对象中价值地位,是各个指标重要性的度量,也是各指标对总体目标贡献值[16].权重方法分为主观权重法和客观权重法,单一权重方法均难以适用于惯性组合导航系统性能评估,具体表现为主观权重法存在客观性差的问题,客观权重法存在解释性差的问题.组合权重是解决单一权重方法存在不足的有效方法[50−52].
通常,利用加权和法组合多种主观权重和客观权重,组合权重的准确性取决于组合系数.从数理统计的观点来看,各指标真实权重值是一个随机变量,不同权重方法计算的权重值是真实权重值的一个样本值.权重wk可以理解为真实权重的第k个样本值,组合系数便为真实权重取权重wk的概率[53].因此,组合系数具有不确定性,常用Shannon 信息熵来表示这种不确定性.组合权重模型属于优化模型,常用的求解方法为直接法、拉格朗日函数法和智能算法.本节内容分析3种求解方法,阐述组合权重求解方法的研究进展.
4.1 直接法分析
赵福均等[54]计算变异系数法和信息熵法的客观权重值,以寻求最优组合权重为目标,建立组合权重优化模型,依据矩阵微分性质,构建优化模型的一阶导数求解组合系数.Ji等[55]提出基于相对熵的组合权重模型,依据组合权重值与单一权重值的偏差尽可能小的原则,建立组合权重优化模型,直接求解优化模型计算组合系数.何华锋等[56]综合熵值法和AHP 的权重,以数据总性能评估极大值作为目标函数,建立组合权重优化模型,直接求解模型计算组合系数.上述文献建立组合权重优化模型,求解组合系数的方法都为直接解优化模型,适用于简单优化问题,难以适用于复杂多目标优化问题.
4.2 拉格朗日函数法分析
汪泽焱等[53]以优化理论和Jaynes 最大熵原理为依据,在多种主观权重的基础上,建立多专家权重多目标优化模型,利用加权和法将其转化为单目标优化模型,构造拉格朗日函数求解组合系数.胡宇桑等[57]综合多种主观权重和客观权重,依据各权重评价值与组合权重评价值的偏差越小越好原则,建立基于最小二乘法的组合权重优化模型,构造拉格朗日函数求解组合系数.周依希等[58]利用AHP和反熵值法,分别计算主观权重和客观权重,考虑权重向量一致性,基于二次规划法建立组合权重优化模型,利用拉格朗日函数法计算组合系数.上述文献采用拉格朗日函数法计算组合系数,要求优化模型满足一阶最优性条件,对于复杂优化模型难以适用.同时,采用加权和法将组合权重多目标优化模型转化为单目标优化模型时,加权系数难以准确确定.
4.3 智能算法分析
智能算法作为一种随机搜索算法,是一种基于种群自主搜索的优化方法,具有参数少、操作简单及不依赖于目标函数等优点,特别适用于具有非线性、包含约束及多目标等特点的复杂优化问题[59].
将智能算法用于求解组合权重的研究成果并不多,主要集中在哈尔滨工程大学程建华团队和合肥工业大学石莉团队.程建华等[60]为了解决利用加权和法,将多专家权重多目标约束优化模型转化为单目标模型时,加权系数难以准确确定的问题,引入基于分解的多目标进化算法(Multi-objective evolutionary algorithm based on decomposition,MOEA/D),将多目标优化模型转化为两个标量单目标优化模型,利用MOEA/D 求解组合系数,此方法解决了第4.2 节中加权系数难以准确确定的问题.石莉等[61]考虑权重本身随机性和权重向量一致性,在多种主观权重的基础上,建立多专家权重非线性约束优化模型,提出改进粒子群(Particle swarm optimization,PSO)算法求解组合系数,解决传统PSO 收敛性差的问题.Dong等[62]为了解决多专家权重存在客观性差的问题,提出基于改进博弈论的主客观组合权重模型,具有非线性和包含等式约束的特点,提出改进MOEA/D-DE (Differential evolution)算法求解组合系数,提高算法分布性和收敛性.上述文献利用智能算法求解组合系数,思想比较新颖,能够解决直接法和拉格朗日函数法存在的不足,是组合权重求解方法的未来研究方向.对比分析文献中的智能算法,如表4 所示.

表4 三种智能算法对比Table 4 Comparison of three intelligent algorithms
本文总结了3种组合权重求解方法的特点和未来研究方向,如表5 所示.由表5 中分析结果可知,直接法和拉格朗日函数法都难以适用于复杂的优化问题;智能算法能够适用于复杂的优化问题,同时,还能解决直接法和拉格朗日函数法存在的不足,是组合权重求解方法的未来发展方向.

表5 组合权重三种求解方法对比Table 5 Comparison of three solving methods of combined weight
5 评估方法研究进展
评估方法作为惯性组合导航系统性能评估方法的主体部分,评估方法的选择直接影响性能评估方法的合理性,通常根据指标和指标体系的特点选择评估方法.与无量纲化方法及组合权重方法三者共同决定性能评估结果合理性和精确性.由第1.2 节内容可知,惯性组合导航系统指标具有模糊性和粗糙性,其中,模糊性是系统的主要特点,指标全都具有模糊性,只有部分指标具有粗糙性.FCE 能够克服指标模糊性,特别适用于具有多属性、多层次特点的多指标系统[63],因此,将FCE 作为惯性组合导航系统性能评估的评估方法.
现有的组合导航系统性能评估研究成果中,大多数将FCE 作为评估方法[10,29,38],验证了上述分析是正确的.本节从组合导航系统评估方法和FCE两个方面展开,阐述评估方法研究进展.
5.1 组合导航系统评估方法分析
Cheng等[64]设计了三级指标体系,提出基于二级FCE 的INS/全球定位系统组合导航系统性能评估方法,利用加权和法组合AHP与熵值法的权重,解决传统FCE 评估结果受单一权重方法影响的问题.朱占龙[65]研究惯性/地磁匹配组合导航系统的地磁图适配性能,结合多个表征地磁区域性能指标,提出基于FCE和AHP 的地磁图适配性综合评估方法,评估结果与试验结果相比较,验证评估方法合理性.由上述内容可知,现阶段大多数研究成果将FCE 作为组合导航系统的评估方法.然而,在现有的研究成果中,存在指标体系不全面、权重精确性不高等问题,需要展开深入研究.
5.2 FCE 研究进展
Lin等[66]提出一种新的混合模糊多目标决策方法,利用博弈论组合模糊AHP和熵值法的权重,组合FCE与模糊接近理想点法,综合评估定性指标和定量指标,提高FCE 评估复杂问题的能力.Jiao等[67]在模糊集理论基础上,建立船舶环境适应性评估模型,利用AHP和熵值法分别计算权重值,分析权重敏感性确定组合系数,运用多级FCE 进行综合评估,解决传统FCE 评估结果受单一权重影响的问题.杨贵军等[68]提出基于熵值−可拓理论的两级FCE 新方法,利用可拓理论计算隶属矩阵,利用熵值法和AHP 分别计算一级权重和二级权重,开展二级模糊综合评估,解决利用可拓理论开展评估时,检测值存在不确定性的问题.Chen等[69]为了克服单因素评估的不足,首次建立包含生物安全和化学安全指标的三级指标体系,采用熵值法和AHP分别计算权重,提出基于FCE 的三级综合评价模型,解决传统FCE 评估结果受单一权重影响的问题.Liang等[70]提出改进AHP 求解权重,与概率语言术语集方法(Probabilistic linguistic term sets)权重组合在一起,解决FCE 受单一权重影响的问题,提出基于FCE 的顾客满意度计算方法.
上述文献利用FCE 能够解决具有不确定性和模糊性问题的优点,针对FCE 存在评估结果受单一权重影响的问题,提出了多种组合权重与FCE相结合的方法,丰富了FCE 的研究成果,可为深入研究FCE 提供参考.
6 研究展望
论文阐述了惯性组合导航系统性能评估方法四部分内容研究进展,还存在一些关键问题急需解决及一些重要问题需要引起关注:
1) 研究指标对系统性能的影响
导航指标具有不可公度性,需要利用无量纲化方法将指标转化为无量纲值.上述操作前提条件是能够准确描述指标变化对系统性能的影响.
针对该问题,可采用以下解决思路: 首先,明确哪些指标还无法准确表示其对系统性能的影响;其次,开展试验或者仿真实验,利用大数据方法或统计学方法分析试验数据或仿真数据,确定两者间的关系,得到初步结论;最后,邀请组合导航领域专家,分析初步结论,进而得出最终结论.需要说明的是,需要注意不同指标的耦合关系,可采用遍历思想指导开展试验或仿真实验,此过程有可能会消除惯性组合导航系统指标粗糙性.
2) 提高无量纲化方法精确性
无量纲化方法对性能评估的影响是双重的,一方面,无量纲化方法影响指标值,由于评估方法集结指标值和权重值,因此,无量纲化方法对评估结果产生影响;另一方面,无量纲化方法影响客观权重值,客观权重方法的输入为指标值,指标值影响客观权重,进而影响组合权重.现有的无量纲化方法研究成果本质上是组合多种无量纲化方法,精确性依旧受经典无量纲化方法影响.同时,不同学者根据实际问题,提出多种无量纲化方法,如何评价不同方法的优劣,能否提出某一类问题通用的无量纲化方法是学者们需要关注的问题.
针对该问题,首先,需要明确指标对系统性能的影响;其次,根据试验数据或者仿真数据,利用数据拟合方法分析数据,选择无量纲化方法.若现有的无量纲化方法难以适用,则需要提出改进型方法,或者根据数据特点研究新无量纲化方法.通常,由改进型无量纲化方法或者新方法是否满足无量纲化方法的充分必要条件[14]来判断合理性,并不能判断不同方法的优劣.可在分析无量纲化方法特点的基础上,研究无量纲化方法的评价方法,验证不同方法的优劣.需要注意的是,评价方法应当具有如下特点: 仅利用无量纲化方法本身信息或者其基本元素的信息,否则会受其他因素影响,导致无量纲化方法不具有通用性.
3) 提高组合权重精确性
在不同原理或要求的基础上,建立组合权重多目标优化模型,通常具有非线性和包含等式约束的特点,使得组合权重的求解变得更加复杂.由第4节内容可知,智能算法是组合权重求解方法的未来发展方向,组合权重的精确性取决于智能算法.
针对此问题,根据组合权重模型特点,研究其他合适的智能算法.常用的智能算法包括: 改进PSO[71−72]、MOEA/D[73−75]、教与学(Teaching-learning-based)[76−77]算法、改进非支配排序遗传算法(Non-dominated sorting genetic algorithm-III,NSGA-III)[78−79]等.如何评价不同算法计算的组合权重优劣,成为解决 “如何求的问题”后,需要重点关注的下一个问题.哈尔滨工程大学程建华团队提出了基于相对熵的组合权重评价方法[62],仅依赖组合权重向量和子权重向量信息,可用于评价不同算法结果的优劣.
4) 研究评估方法的评价方法
根据待评估系统指标及指标体系的特点选择评估方法,适合的评估方法有可能只有一种,也有可能有多种.需要研究评价方法指导选择评估方法.
评估方法的评价方法本质是在解决 “如何评估”的问题后,需要进一步解决 “如何更好地评估”的问题.针对此问题,在已有的研究成果中,利用斯皮尔曼等级相关系数[80−82]表示不同评估方法的差异.其反映了评估方法相对于参考方法的一致性程度,一致性程度越好,相关系数值越大,表明与参考方法越一致,进一步说明该方法性能越好.对于以百分制形式表示评估结果的性能评估方法而言,具有可行性,其原因为百分制形式的性能评估结果本质上也是一种排序形式,是一种以数字形式展现排序结果的方式.此方法存在的不足为需要选择参考方法,参考方法的选择具有主观性.因此,需要研究客观的评价方法,指导选择合适的评估方法,促进惯性组合导航系统性能评估技术发展.
7 结束语
本文以性能评估方法4 部分内容为核心,阐述了惯性组合导航系统性能评估方法的概况、惯性组合导航系统指标体系、无量纲化方法、组合权重方法及评估方法等内容研究进展.分析结果表明,惯性组合导航系统性能评估尚处于研究起步阶段,现有的研究成果并不多;需要进一步研究指标与系统性能间的关系,为研究无量纲化方法奠定基础,也为计算精确的性能评估结果奠定基础;追求惯性组合导航系统性能评估方法的精确性是可行的,主要研究方向为无量纲化方法和权重方法.我们希望通过本文的叙述,能够为其他学者的研究和丰富性能评估理论提供一定的借鉴.
猜你喜欢
统计与决策(2024年4期)2024-03-16 13:38:44
现代装饰(2022年6期)2022-12-17 01:07:38
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
艺术品(2020年8期)2020-10-29 02:50:02
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
传记文学(2017年9期)2017-09-21 03:16:58
西藏研究(2017年3期)2017-09-05 09:45:07
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
统计与信息论坛(2016年12期)2016-12-20 05:43:19
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14