采用可调惯容与阻尼的半主动悬架混棚控制策略研究
2022-11-07 13:09张孝良聂佳梅
重庆理工大学学报(自然科学) 2022年10期
张孝良,卢 鑫,聂佳梅
(1.江苏大学 汽车工程研究院, 江苏 镇江 225599; 2.江苏大学 汽车与交通工程学院, 江苏 镇江 225599)
0 引言
悬架是连接车轴和车架的重要部分,具有减小道路对车辆的冲击和车身垂向振动的作用[1-2]。汽车市场上得到广泛应用的天棚阻尼控制[3-7]虽然能适应多变的路况,但不能适应不同的载荷工况。此外,它还会同时增加车轮动载荷,影响轮胎接地性。2002年,Smith首次提出惯容器的概念,并将惯容器应用于汽车隔振系统,丰富了被动悬架体系[8-11]。2018年本课题组提出了一种天棚惯容控制方法[12-13],研究结果表明天棚惯容控制能够赋予车辆良好的载荷适应性。
然而,应用天棚阻尼和天棚惯容适应路况和载荷的变化时,将会牺牲一定的轮胎接地性。本文通过结合天棚阻尼、天棚惯容和地棚阻尼控制的方法,提出了3种控制策略使车辆具有对路况以及载荷变化的适应性的同时,保证其良好的行驶平顺性和轮胎接地性。所提出的策略可采用一个半主动阻尼器和一个半主动惯容器或一个可调惯容阻尼集成装置来执行,前者称为独立混棚控制。后者是关联型混棚控制。根据半主动装置是以惯容控制为主导还是阻尼控制为主导,将关联型混棚控制分为惯容主导关联型的混棚控制和阻尼主导关联型的混棚控制。仿真结果表明,混棚控制不仅能使车辆适应道路条件和载荷,而且能保证适当的轮胎接地性。
1 混棚悬架系统的性能优势
图1为混棚悬架系统的2自由度模型,其中m2、m1表示簧载质量和非簧载质量。bsky和csky分别表示安在静止天棚(虚拟参考系)和簧载质量之间的虚拟天棚惯容的惯质系数和虚拟天棚阻尼的阻尼系数。cgnd表示连接在静止地棚和非簧载质量之间的虚拟地棚阻尼的阻尼系数。将刚度系数为k的弹簧和阻尼系数为cb的基值阻尼安置在簧下质量和簧上质量之间。轮胎模型建立为刚度系数为kt的弹簧。在这个模型中,z2、z1分别是m2、m1的垂直位移,z0是路面输入。
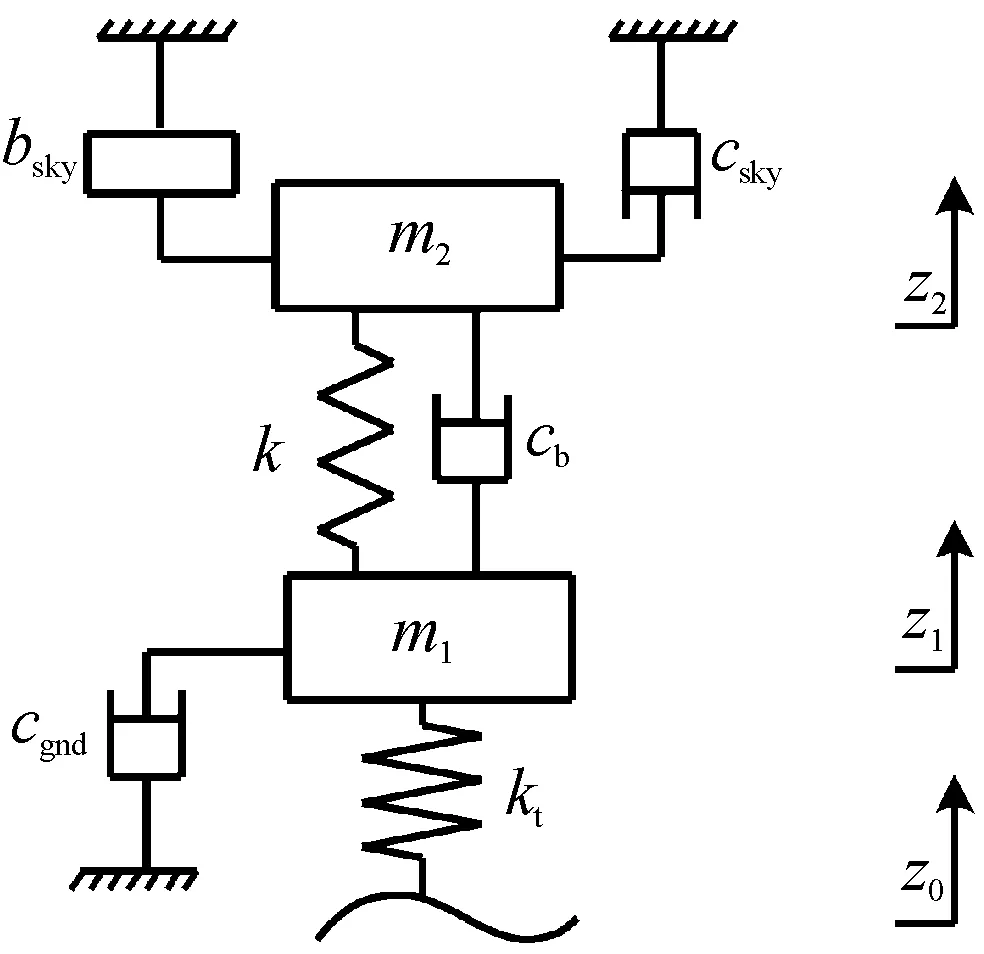
图1 混棚悬架系统的2自由度模型示意图
在混棚系统中,采用天棚惯容虚拟增加的簧载质量[12-14],采用天棚阻尼抑制车身的垂直振动,并采用地棚阻尼抑制车轮跳动。混棚系统通过降低簧载质量的加速度和速度,提高了行驶平顺性,同时降低了车轮动载荷,提高了轮胎接地性。天棚阻尼力Fsky_c、天棚惯性力Fsky_b和地棚阻尼力Fgnd_c可以表示为
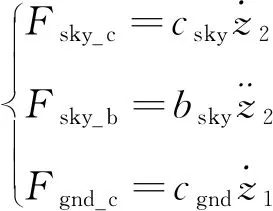
(1)
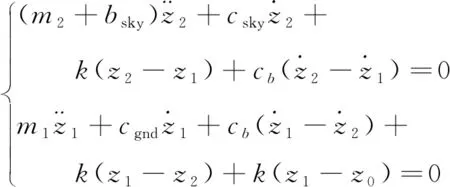
混棚悬架系统的动力学方程如下:
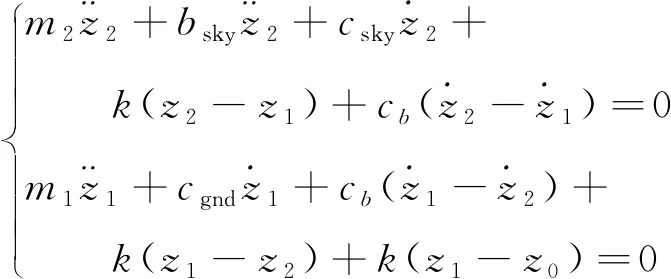
(2)
1.1 载荷适应性
式(2)可以改写成
(3)
式中,m2+bsky可以看作是一个组合型的簧载质量,它与一个天棚阻尼相连,其模型如图2所示。这意味着bsky可以模拟一部分簧载质量。因此,可以根据式(4)在线调整天棚惯容bsky,以保持系统处于虚拟满载状态。因此,即使负载条件发生变化,系统也始终可以获得与满载车辆相同的性能。这表明混棚控制具有载荷适应性。
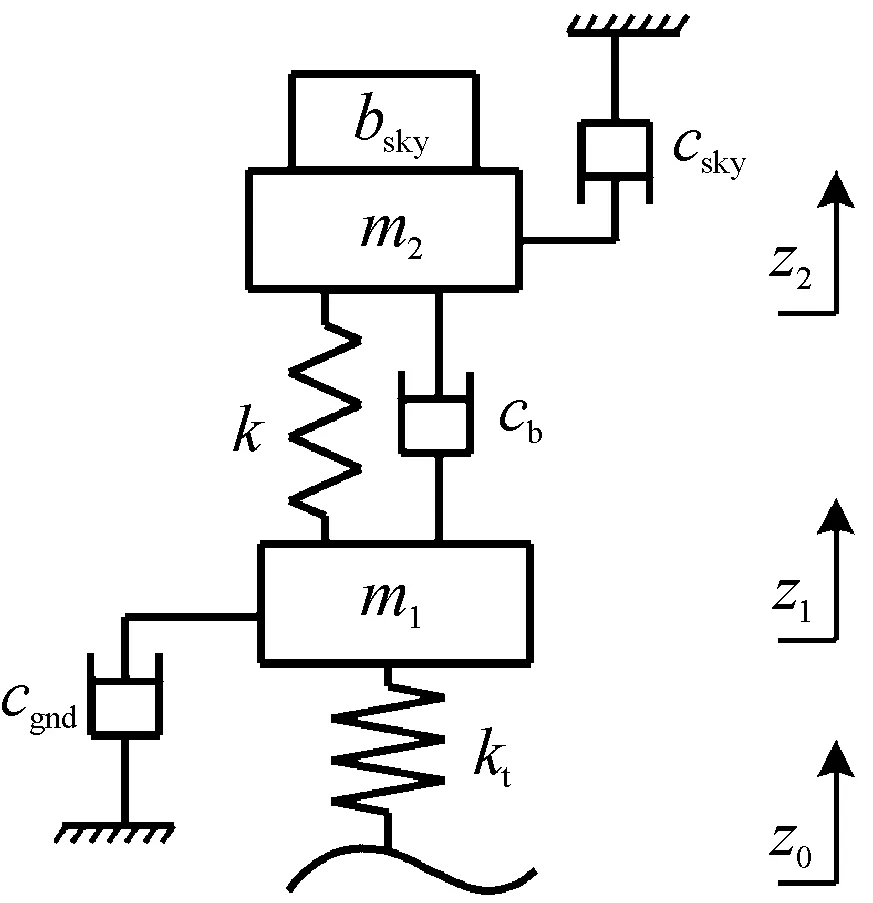
图2 混棚悬架系统的等效系统模型示意图
bsky=mf-m2
(4)
式中,mf为满载质量。
1.2 路况适应性
在不同的路况下,为了使汽车持续获得理想的性能,需要对天棚阻尼进行实时调整,以满足悬架性能的要求,这也是获得道路适应性的过程。根据之前已有的参考文献,系统的阻尼比可以作为控制量,可以计算为
(5)
式中:csum为天棚地棚阻尼之和,cb为基值阻尼。考虑到平顺性和轮胎接地性的要求,系统阻尼比应控制在舒适阻尼比ζc和安全阻尼比ζs之间,并在此范围确定最佳阻尼比[15]。舒适阻尼比ζc和安全阻尼比ζs通过以下公式计算
(6)
(7)
式中:γk为刚度比;γm为质量比。
它们分别可以由下式计算
(8)
(9)
根据式(5),csum可以计算为
(10)
不同路况下车辆有着不同的动态性能需求,为了使悬架能够适应路况变化,针对不同的路面状况,选择不同的阻尼比,进而调节csum和cb能够使悬架具有良好的路况适应性。
一般来说,A级路面下,路况较好,行驶车速一般较高,选取安全阻尼比,提升汽车行驶安全性;而C级路面下,路况较差,行驶车速相对较低,阻尼比选取舒适性阻尼比,提升汽车行驶平顺性;B级路面阻尼比等于综合性阻尼比。由此,仿真条件设置如表1。
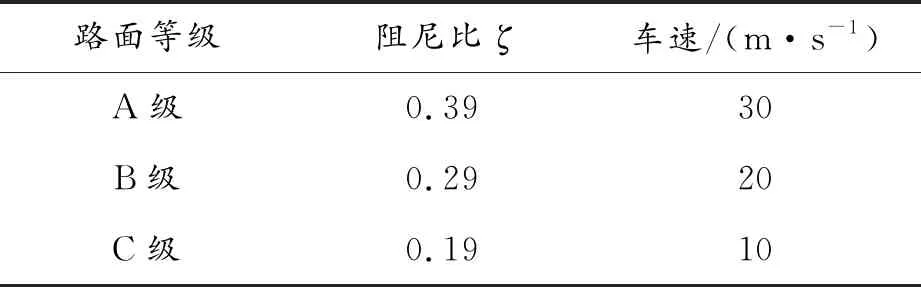
表1 不同路面下的车速与悬架阻尼比仿真条件设置
建立如式(11)所示的自适应度函数将多目标优化问题转变为单一目标优化。
(11)
式中:BAS(z)、SWSS(z)、DTLS(z)分别为混棚控制半主动悬架的车身加速度、悬架动行程和轮胎动载荷均方根值;BAP、SWSP、DTLP分别为被动悬架在相同车速和路面条件下的相应的性能指标的均方根值。根据路面以及车速条件的变化确定权重分配系数α1、α2、α3,如表2所示。
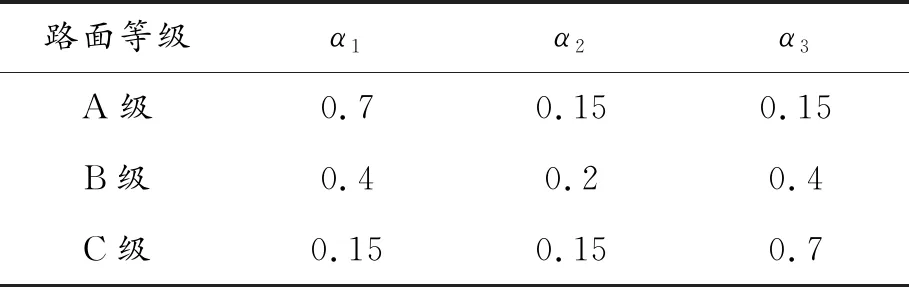
表2 不同路面下的权重分配系数
利用遗传算法对csum和cb进行优化,结果如表3所示。
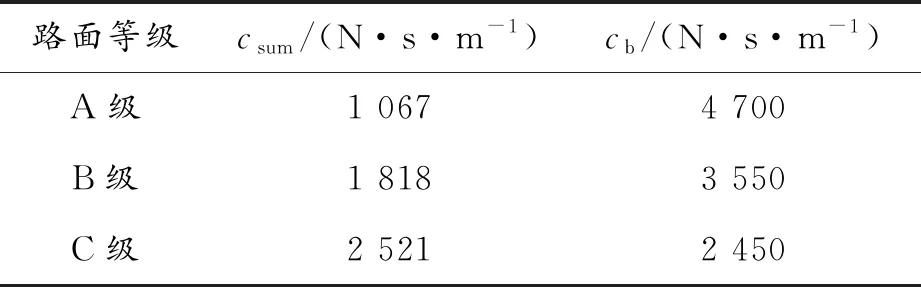
表3 csum和cb优化结果
1.3 轮胎接地性
天棚阻尼控制策略在传统半主动悬架中被广泛使用,但它不可避免地会导致轮胎接地性恶化[16],而轮胎接地性是行车安全的关键。因此,在引入天棚阻尼和天棚惯容的基础上,增加了地棚阻尼结构,减小了非簧载质量的振动,提高了系统的轮胎接地性。地棚阻尼的原理是提供一个与非簧载质量的绝对速度成比例的反向力来抑制非簧载质量的振动。地棚阻尼力的计算公式如下:
(12)
然而,上述混棚系统只是一种理想结构。不可能将阻尼器和惯容器连接到静态参考系上。因此,控制系统的实现应采用半主动或主动执行器的方式。
2 混棚控制的半主动实现
本文提出了2种混棚控制的半主动实现方法,其模型如图3所示。一种采用相互独立的可调阻尼器和可调惯容器,如图3(a)所示。另一种采用可调惯容阻尼集成的半主动装置,如图3(b)所示。2种半主动系统的运动方程可表示为:
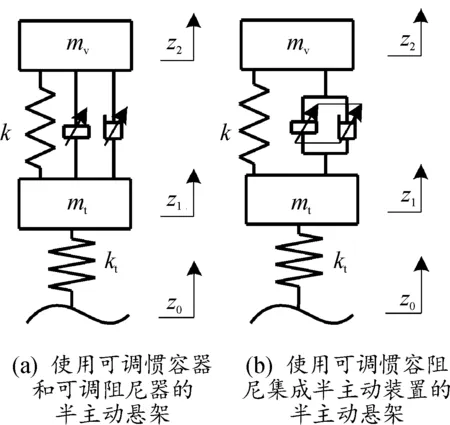
图3 混棚控制的2种半主动模型示意图
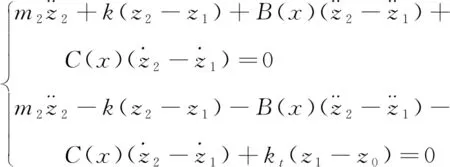
(13)


(14)
其中,
式中:β为阻尼分配系数,其范围为0~1。它表征了天棚阻尼在天棚地棚阻尼总和csum中的比例。当β=0时,只有地棚阻尼控制。当β=1时,只有天棚阻尼控制。考虑到适当增加地棚阻尼的比例有利于抑制轮胎振动,在本文中设置为0.3。
(15)
(16)
基于这种分类,3种混棚控制策略将在2.2节和2.3节给出。
2.1 阻尼增益系数优化
由于天棚阻尼半主动实现的过程中不可避免所产生的车轮动载的恶化,针对不同路况,通过Matlab遗传算法工具箱,以轮胎接地性为优化目标对k1、k2进行优化,优化结果如表4所示。
2.2 独立混棚控制
根据式(15)可以得到:
(17)
考虑到实际装置的限制,独立的半主动惯容器和阻尼器的控制策略分别如下
(18)

(19)
其中
2.3 关联型混棚控制
该控制策略使用本课题组设计并已通过实验验证过的惯容阻尼集成半主动装置来实现,该装置的特点在于能同时提供阻尼力与惯性力,并且其阻尼系数与惯质系数都是关于其阀芯位移x的函数,存在一种阻尼系数与惯质系数的比值关系[17],即
(20)
式中,α被称为装置的阻尼惯容比。
当以阻尼系数作为控制变量时,称为阻尼主导的混棚控制。当以惯质系数作为控制变量,称为惯容主导的混棚控制。下面将介绍这2种控制策略。
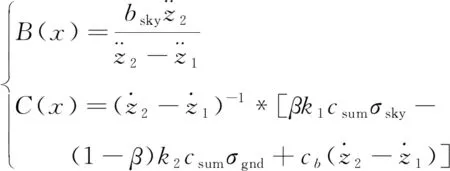
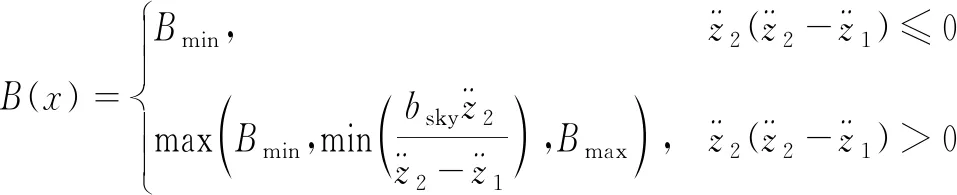
根据式(20)和式(16),惯容主导的混棚控制策略如下

(21)
其中
[βk1csumσsky-(1-β)k2csumσgnd+
(22)
阻尼主导的混棚控制策略如下

(23)
其中
3 混棚控制策略的仿真与分析
本节将通过仿真来验证所提出的混棚控制策略的有效性。仿真选择某轻型卡车,其1/4悬架模型参数如表5所示。
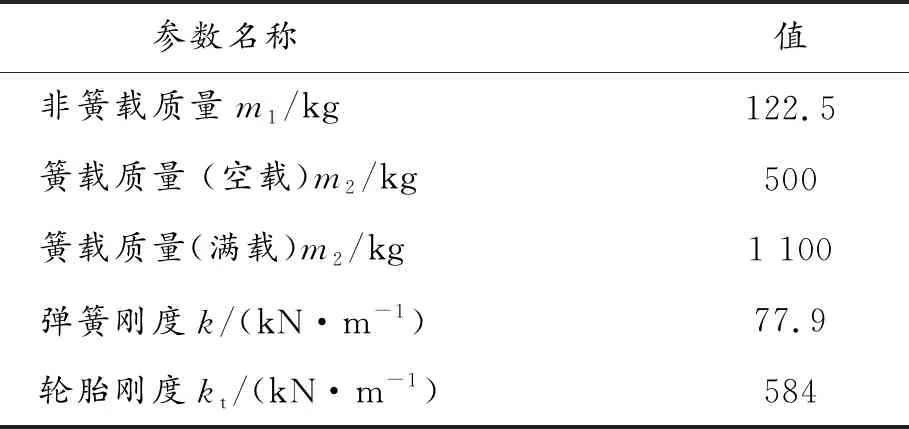
表5 某轻型卡车1/4悬架模型参数
3.1 载荷适应性的分析
为了验证应用混棚控制的半主动悬架如同理想混棚系统一样能够适应载荷的变化,将对被动悬架和这些半主动悬架在不同载荷下的性能进行比较。
对于被动悬架,在空载、半载和满载条件下,簧载质量分别为500、800和1 100 kg。对于半主动悬架,相应的天棚惯容设置为600、300和0 kg,以保持悬架处于虚拟满载状态。为了表述更加简洁,将独立型混棚控制、惯容主导的混棚控制、阻尼主导混棚控制分别称为Sa、Sb、Sc。
3.1.1正弦激励的频域响应
为了分析3种混棚控制的悬架在不同载荷下的性能,将其阻尼比统一设为ξ=0.29。使用正弦波作为激励,其中f的范围为1~100 Hz,A=0.1 m/s。
图4表示了各频率下被动悬架和混棚控制下的半主动悬架的加速度均方根值。表6列出了各悬架的共振频率和相应的峰值。
从表6可以看出,对于所有悬架,载荷的变化对非簧载质量的共振频率影响很小,这是因为载荷的变化主要影响的是簧载质量的共振频率。而且可以观察到,随着载荷的变化,混棚控制的半主动悬架的簧载质量共振频率变化比被动悬架小,特别是混棚控制的半主动悬架Sb和Sc的变化非常小。除此之外,表6表明,满载情况下半主动悬架的簧载质量共振频率与被动悬架相同。这就说明,混棚控制确实相当于在簧载质量上增加了虚拟质量,使悬架保持在满载状态,所以才具有相同的簧载质量共振频率。
此外,如表6所示,与被动悬架相比,半主动悬架的低频(簧载质量的共振频率)和高频(簧下质量的共振频率)的峰值均方根值在所有载荷条件下都显著降低。而且从图4可知,加速度的均方根值在所有载荷条件下的整个频率范围内都有所降低。这意味着混棚控制能够模拟满载条件,显著提高行驶平顺性。
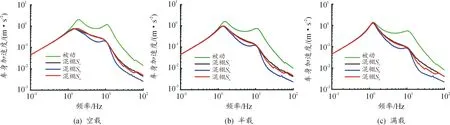
图4 被动悬架和混棚控制下半主动悬架在不同载荷下的车身加速度均方根值曲线
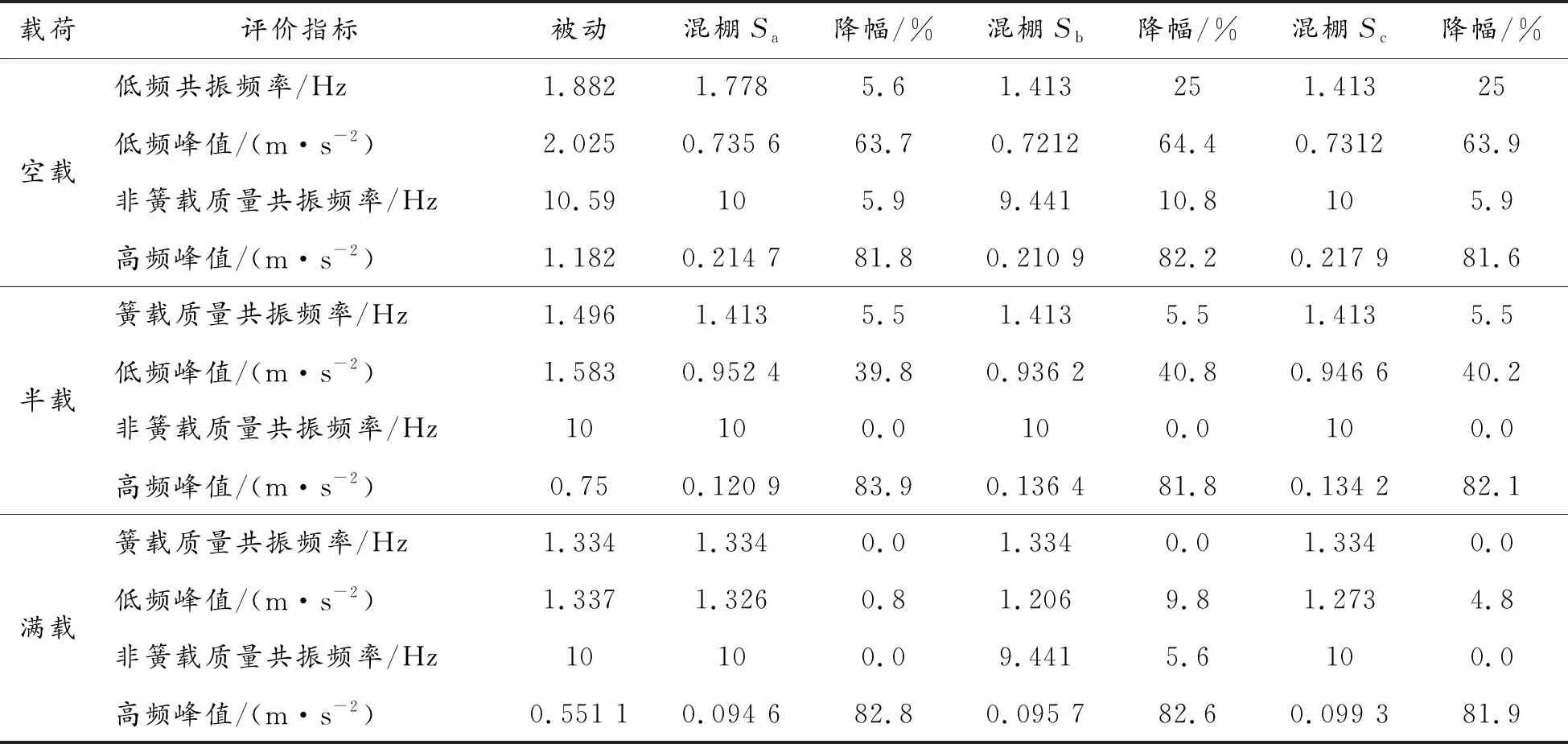
表6 被动悬架和半主动悬架在不同载荷下的共振频率和车身加速度峰值均方根值
3.1.2随机激励的时间响应
对随机激励的响应模拟了车辆在实际道路上的行驶过程。将滤波后的白噪声信号作为道路输入模型,即
(24)
式中:z0(t)为路面不平度输入,G0=64×10-6m3·cycle-1;n0为参考空间频率,n0=0.1 m-1;路面统一设置为B级道路,车速v设定为20 m/s;ω(t)为强度为1的零均值高斯白噪声;n1为下截止频率,n1=0.01 m-1。为了便于比较,将各个载荷下悬架车身加速度的时域响应放到同一张图上,如图5和表7所示,与被动悬架相比,在各种载荷条件下,使用混棚控制的半主动悬架的行驶平顺性都更好,尤其是混棚Sb和Sc。
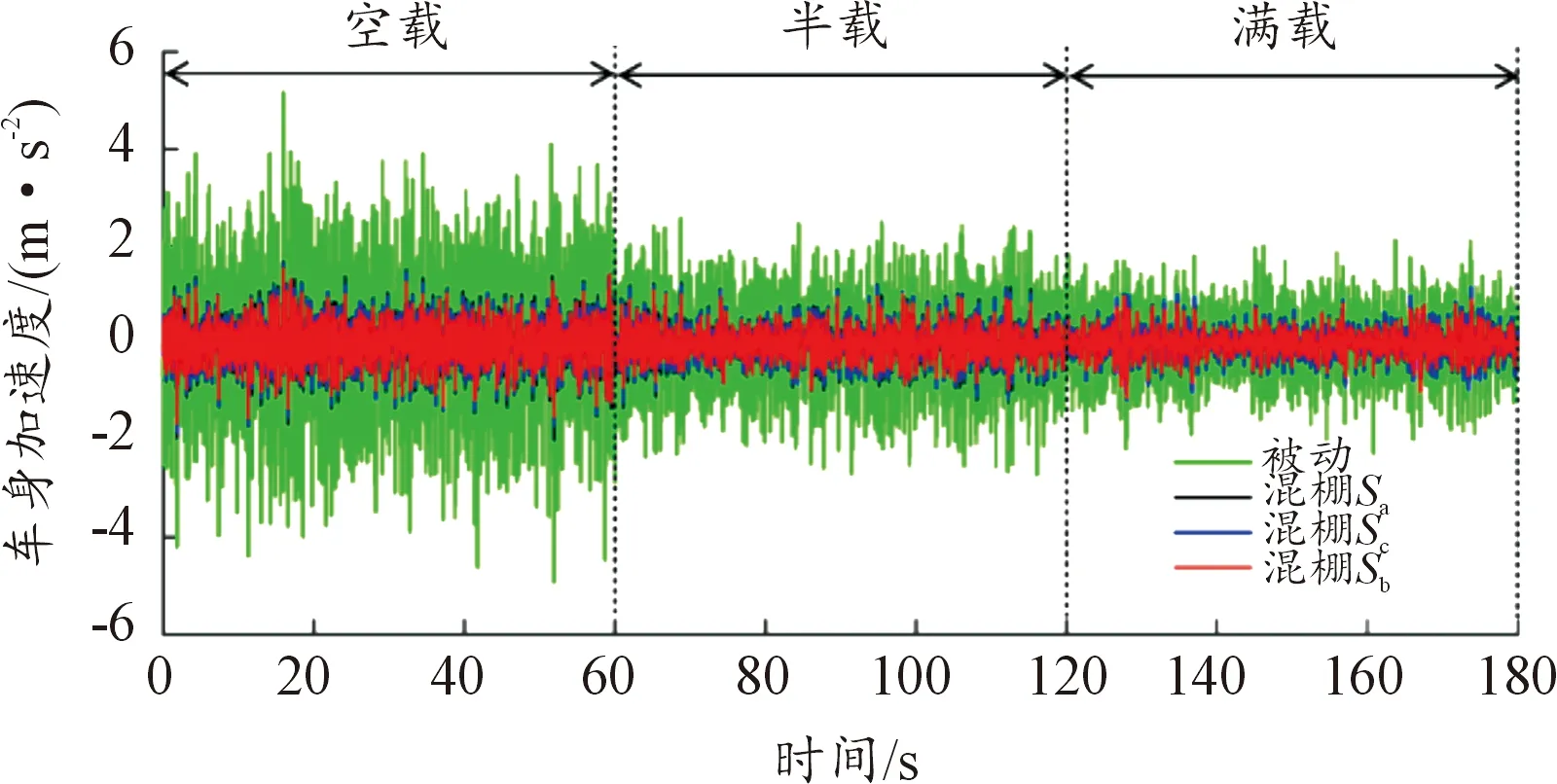
图5 不同载荷下时域响应图

表7 不同载荷下车身加速度均方根值
从表7可以看到,所有载荷下混棚半主动悬架的加速度均方根值均小于满载下的被动悬架的加速度均方根值。当车辆从满载到空载,被动悬架的加速度均方根值从0.67 m/s2增加至1.25 m/s2,而混棚控制Sa、Sb、Sc分别从0.37 m/s2增加至0.45 m/s2,从0.32 m/s2增加至0.36 m/s2,从0.38 m/s2增加至0.42 m/s2。这意味着从满载到空载,混棚控制的加速度均方根值变化更小,更能适应载荷变化。
3.2 路况适应性分析
选择A、B、C 3种等级路面进行研究,仿真过程中,被动悬架设置为满载状态,由于被动悬架的阻尼比ξ是固定的,本文将其设定为0.29。混棚半主动悬架设置为空载,因为半主动悬架可以通过天棚惯容控制模拟满载状态。
这里同样采用式(24)中所示的滤波白噪声信号作为道路输入模型,其中A级路面的不平度系数G0=16×10-6m3·cycle-1, B级路面的不平度系数为G0=64×10-6m3·cycle-1,C级路面的不平度系数为G0=256×10-6m3·cycle-1。为了便于比较,将各个路面车身加速度的仿真结果放在同一个在时域图上,如图6所示。加速度均方根值列在表8中。

表8 不同路况随机路面输入下的车身加速度时域响应均方根值
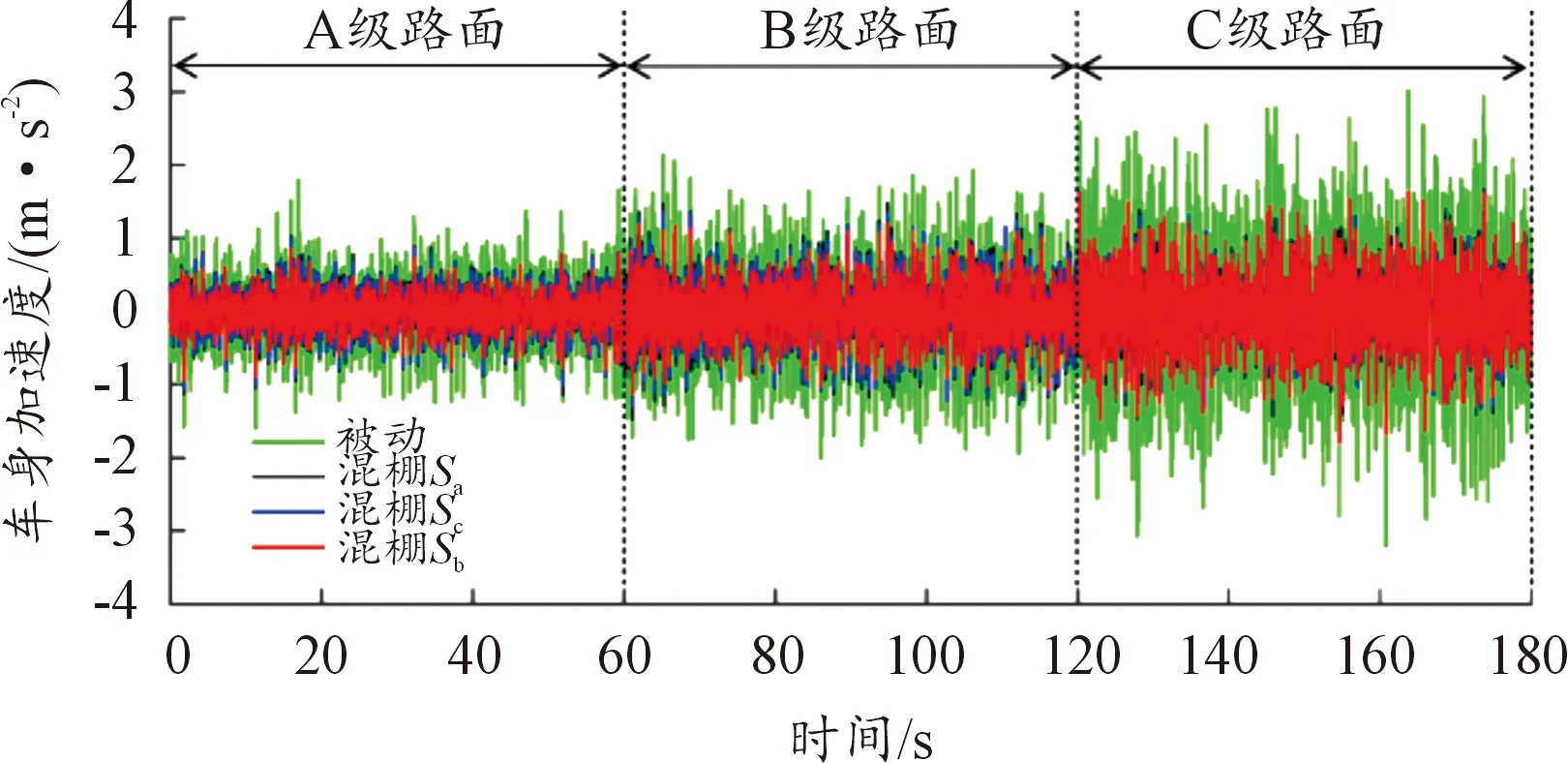
图6 不同路面下车身加速度时域响应图
从图6可以看出,与被动悬架相比,带有混棚控制的半主动悬架在所有路况下车身加速度都有明显降低,特别是混棚控制Sb和Sc。这些结果表明,混棚控制能够在不同的道路条件下实现良好的行驶平顺性。
从表8可以看出,当车辆从良好路面转移至较差路面时,被动悬架的车身加速度均方根值从0.39 m/s2增加至0.91 m/s2;而混棚Sa分别从0.28 m/s2增加至0.53 m/s2,混棚Sb从0.21 m/s2增加至0.54 m/s2,混棚Sc从0.27 m/s2增加至0.49 m/s2。根据这些数据计算可得,与被动悬架相比,混棚半主动悬架Sa、Sb、Sc在良好和较差路面条件下的加速度均方根值的变化范围分别减少了51.9%、36.5%、57.7%。这说明,混棚控制策略可以适应道路状况的变化,并提供稳定的行驶舒适性,因为道路状况的变化对加速度及其均方根值的影响较小。
3.3 单天棚控制与混棚控制对比分析
值得注意的是,天棚阻尼控制不仅可以赋予车辆路况适应性,而且会使非簧载质量的振动加剧,即导致车轮动载荷恶化,而车轮动载荷是轮胎接地性的重要指标。为了研究混棚控制策略中的地棚阻尼降低车轮动载荷的效果,本小节将对单天棚悬架和混棚悬架的性能进行比较。在比较单天棚控制和混棚控制悬架性能的过程中,所有的悬架都设置为空载状态,为的是更好地体现出有无天棚惯容对悬架性能的影响。
3.3.1随机输入的时频域响应分析
仿真中,路面输入采用与3.2节相同的信号作为输入,并且所有的悬架都设置成空载。输出为各个悬架的车身加速度以及车轮动载荷的时域响应,如图7—图9所示。
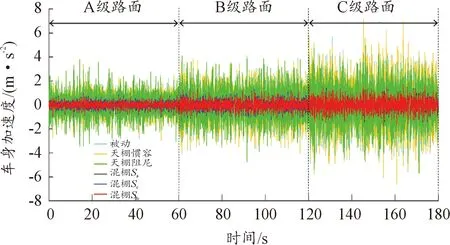
图7 不同路面下混棚与单天棚半主动悬架车身加速度时域响应图
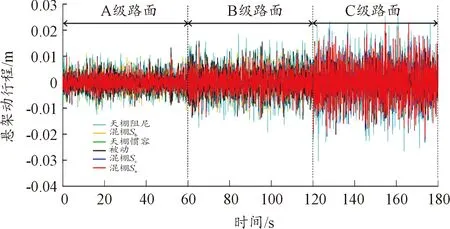
图8 不同路面下混棚与单天棚半主动悬架悬架动行程时域响应图
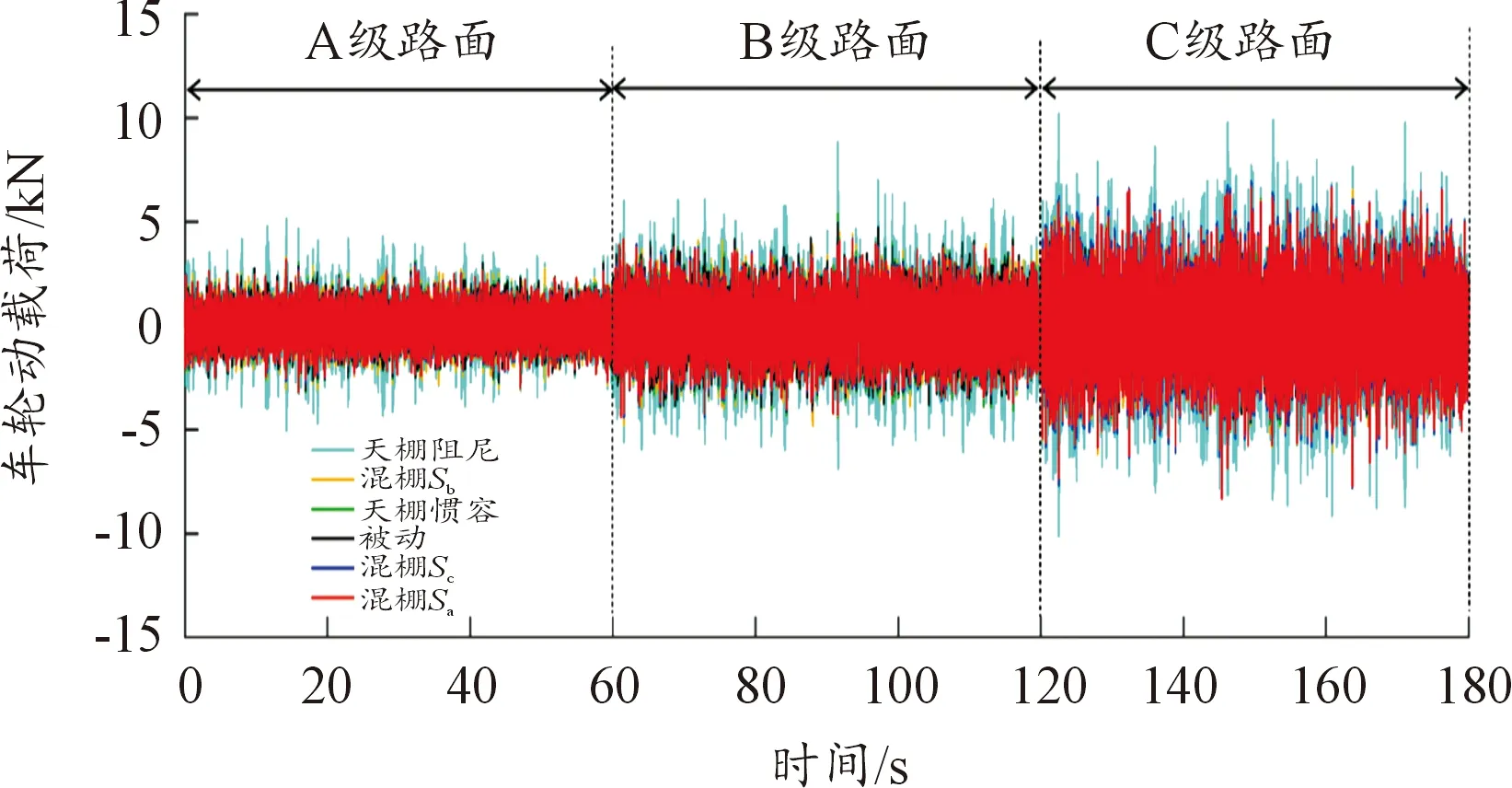
图9 不同路面下混棚与单天棚半主动悬架动行程时域响应图
悬架各个指标的总均方根值如表9所示。从表9可以看出,混棚控制的悬架性能优于单天棚悬架以及被动悬架。仿真结果表明,混棚悬架有效提高了行驶平顺性与轮胎接地性,除了惯容主导的混棚控制的操作稳定性略差于天棚惯性控制,这是平顺性和安全性能之间的折衷所导致的结果,但是仍在接受范围之内。
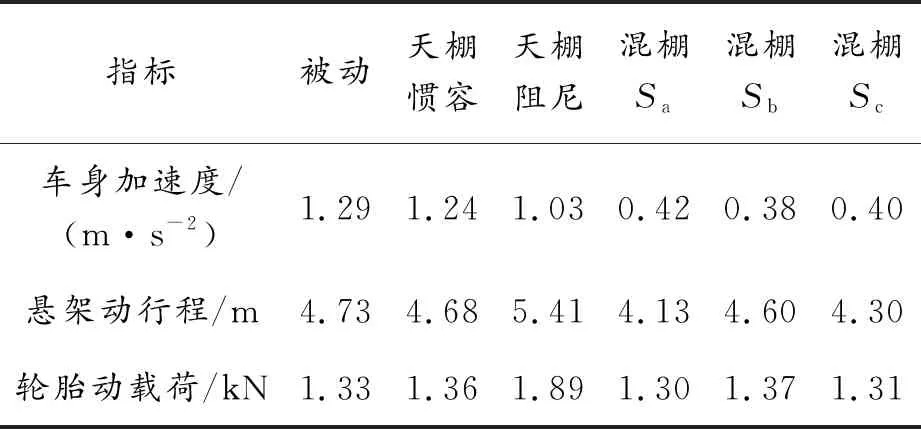
表9 不同路面下悬架性能时域响应总均方根值
对车身加速度仿真结果进行FFT变换得到频域响应,如图10所示。由图10可以看出,混棚控制悬架的车身加速度在0~15 Hz的整个频域范围内优于被动以及单天棚悬架。
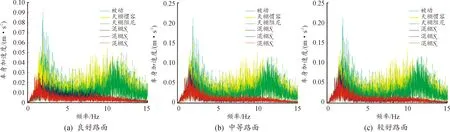
图10 不同路面下混棚与单天棚半主动悬架车身加速度频域响应图
3.3.2正弦输入的频域响应分析
采用与3.1.1小节相同的激励作为输入,悬架性能指标的均方根值如图11所示,图中的峰值列在表10中。
图11(a)所示,天棚惯容控制和混棚控制相比于天棚阻尼控制具有更小的簧载质量共振频率,这再一次证明天棚惯容能够虚拟地增加簧载质量。此外从表10可以看出,与天棚阻尼控制相比,其他4种半主动控制悬架的加速度低频峰值与高频峰值都有所降低。
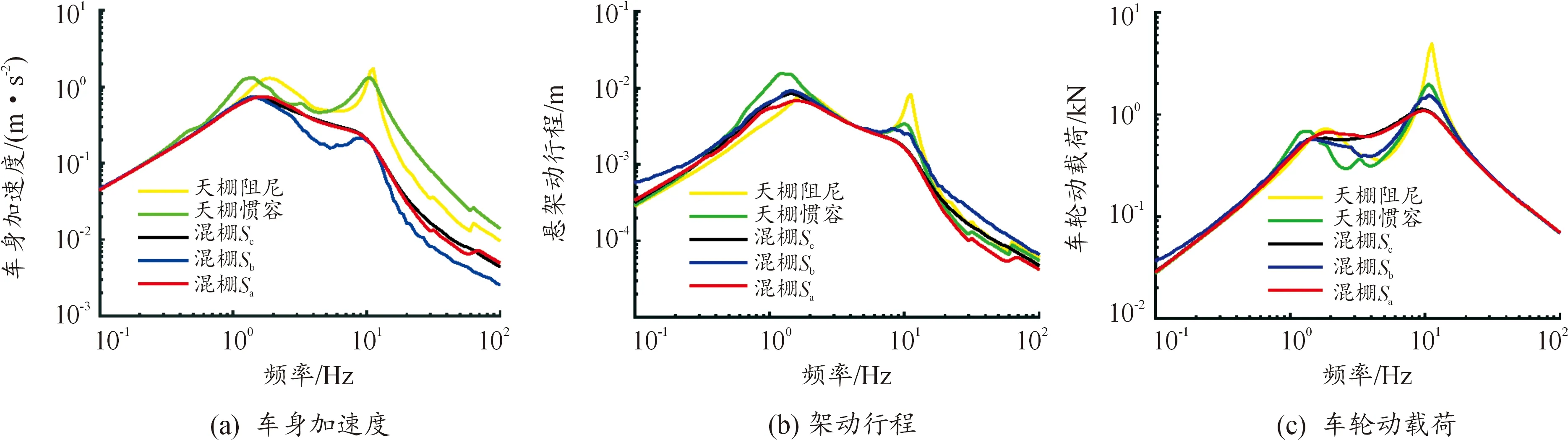
图11 单天棚与混棚控制频域曲线
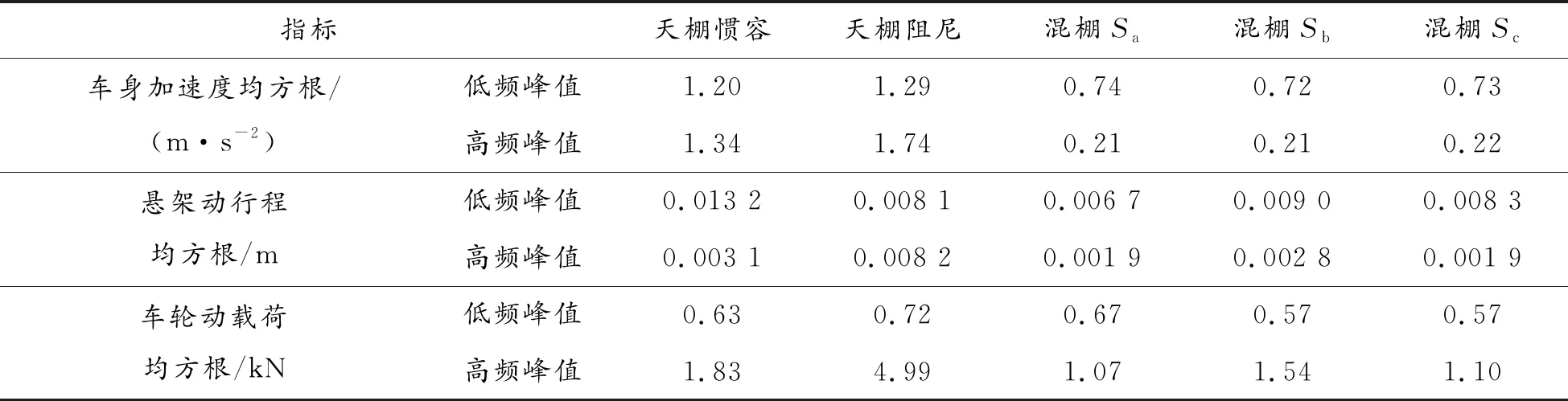
表10 单天棚控制与混棚控制均方根峰值
图11(a)中值得注意的是,混棚控制的加速度均方根值在整个频段上总小于单天棚控制,这说明混棚控制能够使车辆获得理想的性能。从图11(b)和表10可知,低频段上混棚控制的悬架动行程的均方根值介于天棚阻尼和天棚惯容之间,而在高频段上混棚控制的悬架动行程均方根比天棚惯容和天棚阻尼都小,这显示出混棚控制在低频段时能够充分利用悬架行程,而且在高频段上有更好的行驶安全性。
图11(c)和表10表明,除了低频段混棚Sa的车轮动载荷均方根的低频峰值略高于天棚惯容,总体来说,混棚控制的车轮动载荷均方根值的高低频峰值都要低于单天棚控制。这是因为引入地棚阻尼直接抑制了车轮的垂直振动。总体来看,混棚控制能够获得比单天棚控制更好的行驶平顺性、操作稳定性。换句话说,混棚控制更好地兼顾了行驶平顺性与轮胎接地性。
4 结论
单独的天棚阻尼或天棚惯容控制策略不能同时适应路况和载荷条件的变化,针对此问题,也为了更好地平衡车辆对行驶平顺性和轮胎接地性的需求,结合天棚惯容与混合阻尼,提出了一种理想的混棚系统,并根据惯容与阻尼是独立还是关联调节2种情况,用3种不同控制策略半主动地实现了理想混棚系统。通过Matlab仿真对独立型、惯容主导型与阻尼主导型3种控制策略进行了模拟研究。结果表明:
1) 当载荷条件改变时,与被动悬架相比,采用混棚控制策略的半主动悬架的簧载质量共振频率变化小,尤其是混棚Sb和混棚Sc;此外,混棚控制的悬架的加速度均方根值也小,且受载荷变化影响的程度也小于被动悬架。因此,混棚控制具有载荷适应性的优势。
2) 当路面条件改变时,与被动悬架相比,采用混棚控制的半主动悬架在所有路况下车身加速度都明显降低,特别是混棚控制Sb和Sc,并且加速度均方根值的变化范围也小于被动悬架。这表明,混棚控制具有路况适应性。
3) 相比于单天棚控制策略,混棚控制策略使车辆获得良好行驶平顺性的同时,更加充分地考虑了轮胎接地性的需求。这是因为引入地棚阻尼有效抑制了车轮的垂直振动。综上所述,结合了天棚惯容与混合阻尼的混棚控制同时具备了载荷适应性与路况适应性,并且更好地平衡了行驶平顺性与安全性。因此,引入混棚控制有必要。
猜你喜欢
机械设计与制造(2022年5期)2022-05-19
装备制造技术(2020年11期)2021-01-26
装饰装修天地(2020年10期)2020-07-04
汽车零部件(2019年10期)2019-11-13
中国照明(2016年5期)2016-06-15
汽车工程学报(2015年6期)2016-03-23
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
振动、测试与诊断(2014年6期)2014-03-01
空气动力学学报(2013年2期)2013-10-21
振动与冲击(2011年10期)2011-09-17