一类含摩擦单自由度分段光滑碰撞振动系统的动力学分析
2022-11-01 11:21:32张晓蓉
兰州交通大学学报 2022年5期
张晓蓉,卢 鑫,白 冰
(兰州交通大学机电工程学院,兰州 730070)
随着工业技术的不断进步,机械运行装置要求精密化、高效化,需要建立更加精准的数学模型以研究系统的运动状态.含有间隙、约束和摩擦多重非光滑非线性因素的碰撞振动系统更能准确地反应机械运行实况.不同摩擦力模型将影响系统动力学特性,刚性碰撞瞬时能量损失较大,弹性碰撞可有效地缓解这一问题.研究含多重非光滑线性因素的碰撞振动系统动力学对我们研究碰撞机理、寻找最佳参数匹配范围、有效控制振动噪声都有很大帮助.国内外学者通过数値解析、理论推导、图像模拟、实验验证等方法对含有干摩擦碰撞振动系统的滑移—粘滞运动周期解[1]、粘滑运动停留时间[2]、相邻运动边界不连续性[3]等相关问题进行了研究.碰撞振动系统中含有摩擦因素使得系统出现不同形式的分岔和丰富多样的运动.Li发现自激—光滑不连续振荡器的动力学中存在超临界叉式分岔[4],该研究表明含多重非光滑因素的系统动力学行为很复杂.Luo研究了冲击振动系统的动力学特性与模型参数的关联关系[5].Renji,K推导了在基谐波激励下间隙型非线性系统响应幅值的理论估计表达式,实验验证了动态响应[6].文献[7-8]对含干摩擦碰撞振动系统的周期运动和相邻运动转迁规律进行了总结.张艳龙分析了系统含摩擦产生的摩擦诱导动力学现象,系统存在复杂多样的摩擦诱导振动形式[9].朱琳等人研究了含干摩擦粘/弹性构件的两类非光滑减振器的动力学问题[10].隋鑫等用时域—频域方法分析粘滑振动机理[11].吕小红数值模拟了低频下颤碰存在的机理[12].文献[13-14]揭示了由碰撞振动系统相邻运动转迁不可逆性形成了迟滞域.机械系统中摩擦力的存在会加剧零部件的老化并带来噪音,在齿轮系统、转子系统进行了动态特性分析[15-16].
基于含摩擦碰撞振动系统动力学的复杂性,我们更要探究其分岔特征.本文通过数值仿真对单自由度摩擦碰撞振动系统进行了动力学分析,讨论了系统出现的两类滑移运动:滑移-粘滞运动与纯滑移运动,分析了相邻运动转迁的不可逆性,总结了相邻基本周期运动的转迁规律,数值表明转迁域内存在多类型亚谐振动,为系统的参数优化提供了科学的依据.
1 单自由度分段光滑碰撞振动系统的动力学模型
图1建立了一类含摩擦分段光滑的单自由度碰撞振动系统的力学模型,M1表示单自由度质量块的质量,坐标系的原点建立在系统的平衡位置,X1表示质块的位移,质块通过刚度系数为K1的线性弹簧、阻尼系数为C1线性阻尼器以及线性弹簧K0连接于左端支撑面,作用在M1质块上的简谐激振力为P1sin(ΩT+τ),其中P1为激振力振幅,激振力的角频率为 Ω,τ为相位角,单位分别为:N、rad/s、rad.如图1所示,质块在皮带轮上只做水平方向的运动,相互作用的摩擦力系数用μ表示,此摩擦为一种干摩擦,皮带轮的速度V大小方向恒定,且左右碰撞间隙相等.在外界力的作用下,质块M1开始运动,当激振力的振幅较小时,系统为单自由度线性振动系统,随着激励力不断增大,质块的位移开始不断变化,当质块M1的位移X1大于等于间隙B(或小于等于间隙-B)时,质块M1将会与右(左)弹性约束面发生接触碰撞,此时左固定端刚度系数为K0的线性弹簧对质块M1开始产生恢复力,弹簧K0将被拉伸(或者压缩),质块M1以此瞬时速度(有可能与皮带轮速度相等)在皮带轮上水平运动至到M1速度方向改变,又以新的初值开始运动,运动状态如此反复.

图1 动力学模型Fig.1 M echanical model
由图1可知,质块M1运动过程中包含的非线性因素有:碰撞间隙、左端恢复力、质块与皮带轮间的摩擦力等.文中用F1表示简谐激振力、阻尼力、线性弹簧的恢复力和与皮带轮之间的摩擦力等合力,则示除摩擦力之外的其他合力,则F1′=sin(ωt+τ)-在,质块碰撞时运动形式复杂多样.当质块M1的速度与皮带轮的速度V相等且其所受的合外力F1′小于最大静摩擦力Fmax时,质块将粘滞在皮带轮上,即质块与皮带轮成为一个整体,直至合外力F1′大于最大静摩擦力Fmax,粘滞状态结束,质块以V为初速度重新开始滑移.文章研究质块在任意连续两次碰撞阶段内的运动形式,为分析方便,用·X1-和X·1+分别表示质块M1碰撞前后瞬时速度,由系统可知X·1+=0.由于非线性因素摩擦力的存在,系统出现纯滑移和滑移—粘滞两种运动状态,振动特性在这两者运动间转换.
本文引入无量纲变量和参数,如下所示:


由此可得图1的无量纲运动微分方程为:

线性弹簧对其产生的恢复力:

作用在质块M1上的摩擦力:

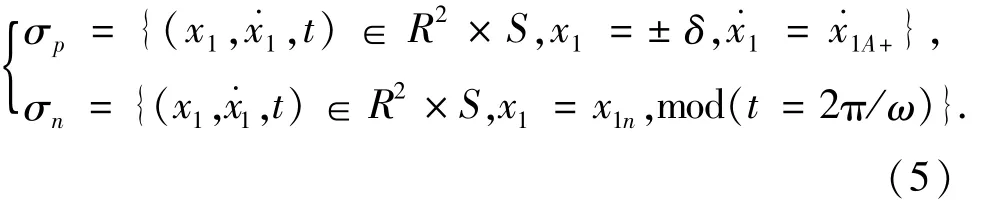
通过无量纲化可确定部分参数的取值范围:μk0∈(0,1),v∈ (0,1),μ∈ (0,1).前文所述中当质块 M1满足条件粘滞于传动带,称此时系统处于滑移-粘滞状态,振动系统运动方程变为:¨x1+2ζ˙x1+x1+f(x1)=sin(ωt+τ)之相对的运动状态称为纯滑移.文中用n-p-q来表示系统的振动冲击特性,n表示系统振动周期Tn=2nπ/ω与外激励力周期T0=2π/ω的比值,(n=1,2,3,…),q和 p分别表示质块M1与左右约束的冲击次数.如图1所示,该系统中存在的非线性因素都具有对称性,但由于皮带具有向右恒定运动的情况,导致系统出现了左右碰撞次数不相等或者冲击速度不等的非对称运动n-p-q和n--p-q,其n--p-q表示此时质块粘滞于皮带轮上,速度恒定.为了表明该系统动力学特征,本文建立了两种不同Poincaré截面以更好计算碰撞次数和周期,Poincaré截面分别为:
映射σp上的分岔支数即质块M1与约束两侧的碰撞次数,映射σn可确定不同运动的循环次数即周期数n.根据庞加莱截面求解该系统发生碰撞时的扰动映射,以确定系统的稳定性.周期运动的扰动映射为X′=f~(ν,X),其中X∈R2,ν∈R1,ν是一个系统实际参数,X=(x2,˙x1+,t)T,X′=(x′2,˙x′1+,τ′)T.
1-p-q周期运动的扰动映射可表示为:X(i+1)0=ΔX(i)0,其中X*的扰动向量Δx(i)0=(Δ˙x(i)1+,Δτ(i))T,Δx(i+1)0=(Δ˙x(i+1)1+,Δτ(i+1))T,Poincaré截面σp上运动的不动点是X*0=(˙x′1+,τ′0)T,把系统初始条件˙x1(0)=˙x1(2nπ/ω)=˙x1+和碰撞时的条件x1(te)=x1(2nπ/ω)=δ代入碰撞振动运动方程(2)可得t=0时刻周期n=1的扰动方程.
2 单自由度分段光滑碰撞振动系统的动力学分析
2.1 纯滑移运动与滑移—黏滞运动转迁分析
确定系统的基准无量纲参数 μk0=0.96,ζ=0.1,fμ=0.1,ν=0.1,δ=0.3,研究系统动力学特性.以激振频率ω作为系统的控制参数,从图2的全局分岔图中可以读出本参数域出现了两类不同滑移运动,并且观察到两类运动的转迁现象,滑移-黏滞运动以n--p-q标识,出现在 ω∈[0.061 5,0.3]区间,符号n-pq表示纯滑移运动,出现在ω=0.061 5的左侧区域.整个参数域中两类不同滑移运动呈波浪状前进,由图发现右冲击次数大于左冲击次数.纵坐标表示其冲击速度,质块对右碰撞面的冲击速度相对左碰撞面较小,发生的是不对称的滑移-黏滞运动,左右碰撞面的冲击程度和速度都不尽相同,图3所示的相图可以观察到.
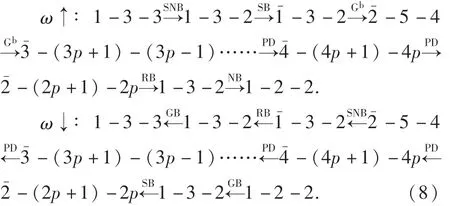
随着频率ω的递减,滑移-黏滞运动1--3-4连续两次穿过鞍结分岔线转迁到1--2-3运动中,系统相互交替发生鞍结分岔与Grazing分岔使得滑移-粘滞运动一直持续至1--3-3运动,从图2中可以看出,在1--3-4与1--2-3运动间出现了占有范围很窄的纯滑移1-3-3运动,尽管此时质块M1满足粘滞皮带轮的条件,但外激励力随频率的变化而变化使质块左右发生碰撞,偶尔脱离粘滞状态.1--pq(p<q)运动占据参数域较宽,定义一个激励力周期内滑移-粘滞运动第p、q碰撞序列为m(m=0,1,2,…,m <q),碰撞序列 m越大,即第 p、q次冲击约束面的速度越接近零,振幅越小.例如1--3-2运动以近似于零的速度与接触面发生碰撞,此时F′1仍然小于最大静摩擦力Fmax,合力方向不变,质块继续粘滞与皮带轮,在激励力和弹簧恢复力的作用下迅速发生Grazing分岔出现1--3-3运动,1--3-2运动的参数域很狭窄,如图2(a)所示.1--3-3的第m次碰撞序以冲击速度不为零发生Rising分岔进入到同周期相同碰撞次数的纯滑移1-3-3运动中,此时合外力方向改变,质块不再粘滞与皮带轮,以皮带轮运行速度为初始速度开始纯滑移运动.转迁规律如下:
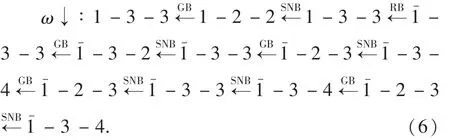
式中GB表示Real-Grazing分岔,SNB表示鞍结分岔,RB表示Rising分岔.
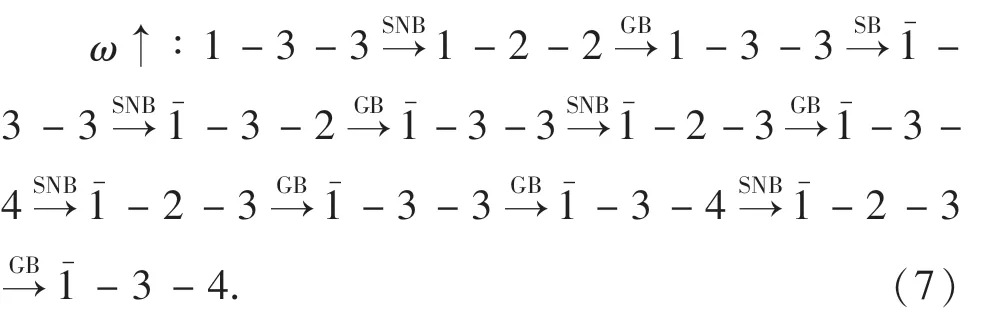
其中SB表示Sliding分岔.在1--p-p与1--p-(p+1)运动转迁过程中遇到1--p-p运动时,分岔不会结束,直至作用在质块上的合外力方向改变.
图2(b)保持基准参数不变,增大碰撞间隙至δ=1.05的同频段下滑移-粘滞运动与纯滑移运动相互转变的分岔图,由图可以得出增大间隙,质块所受合外力使得其左侧不被冲击,即碰撞次数为零,这样可有效避免噪音与冲击带来的危害.粘滞区间减小,分布在ω∈[0.1,0.3].此类型1--p-0运动的转迁规律符合式(6)、(7),相邻运动的转迁具有不可逆性.冲击次数减小,系统运动形式单一,相邻运动多以发生擦切分岔为主,并且冲击速度波动幅度相对图2(a)明显的降低.由于线性弹簧力的存在,低频下碰撞次数减小,但系统以不发生1-0-0运动而结束分岔.质块M1最终以速度为零离开一侧约束面,在反向外力F1′的作用下质块进行下一个周期的运动.图3描述了δ=0.3时滑移—粘滞运动与纯滑移运动的转迁过程以及相邻运动的擦切过程,从图中可以得出低频下由于不断压缩线性弹簧出现了簇发碰撞振动模式,粘滞-碰撞序列越大,第p、q次冲击速度越小.

图3 δ=0.3时滑移—粘滞运动相图Fig.3 The the phase diagram of slid-sticky motion atδ=0.3
2.2 碰撞振动系统的基本周期运动及分岔特性
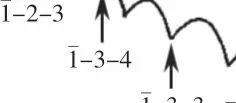
保持基本参数不变,取碰撞间隙δ=0.36,从图4中可以看出随着激振频率的增大,基本周期运动1-3-3向相邻1-2-2运动转变时发生的一系列倍化分岔、鞍结分岔、虚擦切分岔、叉式分岔等,众多分岔使得相邻运动间出现丰富多样的亚谐运动,相邻运动围成的区域在二维参数平面中称舌形域,由单参数分岔图4可知,该舌形域由1--3-2运动的周期倍化分岔线PD1--3-2和1-2-2运动的擦切分岔线G1-2-2围成.非对称的1-3-3运动经Pitch分岔进入到对称的1-3-3运动,如图4所示,对称1-3-3运动穿越SN1-3-3线嵌入到短暂的1-3-2运动,此时1-3-2运动是纯滑移运动与滑移-粘滞运动过渡区.随频率的增大,1-3-2运动发生Sliding分岔进入范围较宽的1--3-2运动窗口中,此时质块与皮带出现了不稳定的其他周期亚谐运动,如2--5-4、3--7-6运动,亚谐运动不断经过Bare-Grazing和周期倍化分岔使得系统出现长周期运动或混沌.此时约束面呈现无规律碰撞,滑移粘滞运动加剧了质块与皮带轮的磨损,随着作用在质块M1上合外力的变化,混沌和长周期运动最终以逆倍化周期分岔和鞍结分岔脱离出来,随后进入到与纯滑移1-3-2运动中,Sliding分岔的相反过程是Rising分岔,即从粘滞状态脱离到基本周期运动的分岔称为Rising分岔,1-3-2运动穿越SN1-3-2进入到稳定的1-2-2运动中.图5描述了质块粘滞—滑移期间从单周期运动转变到混沌之中的相图Poincaré映射图.从分岔图和相图中可以总结出该模型基本周期振动1-2-2与1-3-3的转迁规律如下:
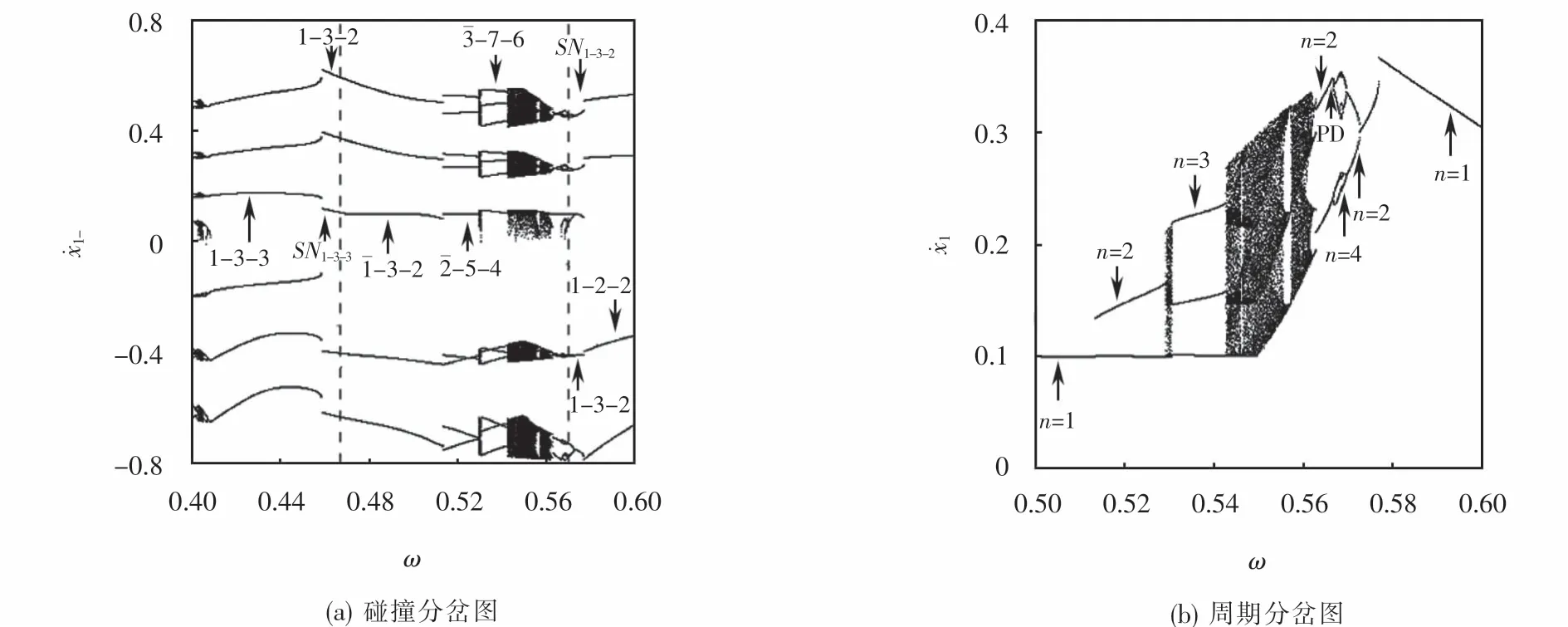
图4 间隙δ=0.36时系统的分岔图Fig.4 The bifurcation diagram at the gap ofδ=0.36

图5 间隙δ=0.36时系统的相图和庞加莱映射图Fig.5 Phase portraits and Poincarém aps of the system at the gap ofδ=0.36
其中Gb表示Bare-Grazing分岔,GB表示Real-Grazing分岔,PD表示周期倍化分岔,Sliding分岔用SB表示,RB表示Rising分岔,SNB表示鞍结分岔.
3 结论
本文研究了一类含摩擦单自由度分段光滑碰撞振动系统低频域两类不同滑移运动相互转迁规律,分析了相邻基本周期振动转变的不可逆性以及亚谐运动存在的多样性,给出了1-p-p与1-(p-1)-(p-1)运动的变化规律.
1)该碰撞振动系统呈现出分段光滑非线性振动特征,滑移-粘滞运动与纯滑移运动持续交替出现在低频率和小间隙区.高频段,由于线性弹簧恢复力的存在,使得两类不同的滑移运动呈波浪状前进,质块以变化的速度与左右接触面发生碰撞且碰撞次数不等,粘滞于皮带轮时间不等.系统以擦切分岔、鞍结分岔、Rising分岔或Sliding分岔为主.当激振频率较小时,外激励力较小,系统以单周期运动为主,碰撞次数不发生变化,系统仅发生Rising分岔从1--p-p进入到对应的1-p-p运动中,最终以纯滑移运动结束碰撞过程.
2)相邻基本周期振动1-p-p与1-(p-1)-(p-1)运动转迁具有不可逆性.随频率的增大,1-p-p与1-(p-1)-(p-1)两条运动边界线包络了一系列奇异点,奇异点包罗的区域成为舌形域,域内出现形如2--(2p+1)-2p、3--3p-(3p-1)、4--(4p+1)-4p等亚谐运动.1-p-p运动通过鞍结分岔、Sliding分岔进入到多周期滑移—粘滞亚谐运动中.当频率减小时,长周期、混沌运动发生逆倍化周期分岔、鞍结分岔脱离到的纯滑移1-(p-1)-(p-1)运动中的两者变化规律相反,但是相互运动转迁不可逆.
3)低频域内的弹性碰撞振动系统在外界间歇激振力和线性弹簧恢复力的耦合作用下出现簇发碰撞振动模式.
猜你喜欢
机械制造(2022年6期)2022-09-01 07:35:00
数学物理学报(2022年4期)2022-08-22 04:08:00
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:08
中学生数理化·高一版(2021年2期)2021-03-19 08:32:06
中学生数理化·中考版(2019年10期)2019-11-25 09:39:06
中学生数理化·八年级物理人教版(2019年3期)2019-04-25 06:20:52
新商务周刊(2018年12期)2018-12-08 23:34:06
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
中学生数理化·中考版(2017年10期)2017-04-23 06:29:40
长沙大学学报(2015年5期)2015-01-04 02:06:28