
基于PLC的金枪鱼延绳钓投绳机控制系统
2022-10-29 06:24崔秀芳许正文曲晓文
制造业自动化 2022年10期
崔秀芳,张 斌,邵 祺,许正文,曲晓文
(上海海洋大学 工程学院,上海 201306)
0 引言
金枪鱼是一种重要的商业捕捞物种[1,2],是世界海洋渔业的主要捕捞物种之一。金枪鱼的捕捞效率受钓钩水深的影响极其显著,刘莉莉[3]等人在研究中发现167.57m水层的捕捞概率密度最大。同时,戴小杰等[4]发现金枪鱼延绳钓对濒危海龟物种的误捕情况十分严重,深水延绳钓的浅钩对海龟误捕的仍然占较大比例。由此可以看出优化钩的深度,不仅有助于提高捕捞效率,同时也将有助于减少鲨鱼和海龟等兼捕物的误捕[5~7]。
随着现代计算机技术的发展,可以从数值模拟的角度建立延绳钓渔具的动力学模型,获取在不同海况影响下延绳钓渔具的载重分布和水下形态[8]。传统的金枪鱼延绳钓钓具理论深度通常按照悬链线公式计算[9],得出每个钓钩的理论深度。在此基础上,宋利明使用SPSS软件,通过建立多元线性逐步回归模型,建立了预测钩深和理论深度的关系模型[10],根据测量的风速、风向、投放的钩子数能够计算获得最佳的投绳速度、挂钩的时间间隔以及航速。本文将从PLC控制的角度来,以文献[10]中的数学模型为基础,设计出基于PLC的金枪鱼延绳钓自动投绳机的控制系统。
1 系统总体设计
基于PLC控制的金枪鱼延绳钓投绳机装置,通过触摸屏输入钩子数,通过风速传感器、风向传感器测量出风速、风向、船舷角,PLC通过以太网线连接PC电脑端,通过OPC协议传输数据,PC电脑端在SQL Server中查找相关数据所对应的最佳投钩参数,将最佳的投绳时间间隔、投绳速度以及航速下传给PLC,PLC通过以太网线或者DP9接口利用RS485协议在触摸屏上显示最佳的航速,利用变频器PID控制电机以及利用霍尔传感器测量投绳速度从而自动控制投绳速度,通过外接提示灯以及蜂鸣器按照最佳的投绳时间间隔利用声光提醒挂上支线,从而按照事先规划好的控制方案进行工作,基于PLC控制的金枪鱼延绳钓投绳机装置的控制系统框图如图1所示。

图1 金枪鱼延绳钓投绳机装置的控制系统框图
2 系统硬件设计
金枪鱼延绳钓自动投绳机的动作过程,涉及到控制的硬件有HMI触摸屏、西门子S7-200 SMART PLC、风速仪、风向仪、霍尔传感器等。本系统是基于捷胜海洋装备股份有限公司的金枪鱼延绳钓装置进行改进研究,根据现有条件只需选型新的处理器模块与风速仪、风向仪。
2.1 处理器模块
西门子SR40型S7-200 SMART PLC,继电器输出,220V交流供电。集成在模块上的Micro SD卡插槽,可实现远程维护程序的功能。CPU标配网线接口,支持多种通信协议,可与其他PLC、上位机、变频器、触摸屏等连网通信,同时CPU的处理性能优秀,基本指令执行时间最快可低至0.15μs。SR40型CPU板载I/O有24点输入,16点输出,可以应用于控制逻辑复杂、I/O点数多的项目之中。PLC模块如图2所示。

图2 西门子SR40型 S7-200 SMART PLC
2.2 风速风向传感器模块
超声波风速风向传感器采用RS485总线Modbus-RTU 通信协议与PLC通讯,能够同时传输风速风向的数据。超声波风速风向仪相比传统的三杯式风速仪、风向标风向仪具有较大的性能优质,其受自然环境干扰小,分辨率高,精度好,无启动风速限制(传统的三杯式风速仪大多是需要一定的启动风速的),无角度限制(传统的风向标风向仪精度低,大多为八方向与十六方向),具备IP66的高防护等级,坚固耐用,无需调试校准。超声波风速风向传感器实物图如图3所示。

图3 超声波风速风向传感器
3 系统软件设计
本控制系统的软件设计包括PC Acess SMART、SIMATIC WinCC Explorer、STEP 7 -Micro/WIN SMART、SQL Server 2016软件的相关配置与程序编写;操作系统选用Windows10,主控制器采用西门子S7-200 SMART型PLC。软件的设计主要包括: 数据采集,数据处理、数据传输。投绳机装置的控制系统流程图如图4所示。

图4 金枪鱼延绳钓投绳机装置的控制系统流程图
3.1 PC Access SMART软件与S7-200 SMART CPU建立连接
PC Access SMART软件可以通过以太网接口或者RS485接口与S7-200 SMART CPU建立连接,本文选择通过连接以太网网线建立连接。
3.1.1 设置计算机的IP地址
给计算机设置一个固定的地址,在“网络连接属性界面”里选择“以太网属性”,选择网络选项下的“Internet协议版本4(TCP/IPv4)”,点击“属性”,点击“使用下面的IP地址”选项,根据需求输入一个固定的IP地址与子网掩码,如图5所示。

图5 设置固定的IP地址与子网掩码
3.1.2 设置S7-200 SMART CPU的IP地址
在STEP 7-Micro/WIN SMART软件的“通信”窗口中编辑CPU的IP地址。在“通信接口”下选择客户计算机的网卡进行通信。单击“查找CPU”按钮,会把连接在以太网上的所有设备都搜索出来。根据需要修改S7-200 SMART CPU的IP地址。在选项框右侧的“站名称”、“默认网关”、“子网掩码”、“IP地址”处设置相关内容,最后单击“确认”完成设置,如图6所示。
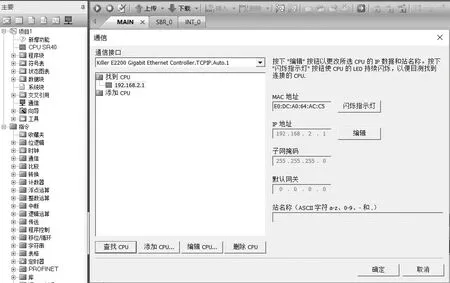
图6 设置S7-200 SMART CPU的IP地址
3.1.3 设置PC Access SMART软件
在PC Access SMART软件的进行OPC通信的设置。在项目下的“MWSMART(TCP/IP)”右击选择“新建PLC”。单击“查找CPU”按钮,连接在以太网上的所有设备都在对话框中显示出来。确认对应的S7-200 SMART CPU的IP地址。在“本地TSAP”与“远程本地TSAP”处设置相关内容,然后单击“确认”按钮完成地址设置,如图7所示。

图7 设置PC Access SMART软件
右击NewPLC新建文件夹,右击新文件夹新建条目,设定对应的名称以及读写地址、读写属性、数据类型,并能够设置上下限以及注释,并保存。
3.2 设置SQL Server数据库
使用管理员账户打开Microsoft SQL Server Management Studio数据库管理软件,进入主界面。新建数据库,数据库名称根据需求设置,本文设置为“最佳参数”,点击“确认”,刷新后能看到新生成的“最佳参数数据库”,右击“最佳参数数据库”下的“表”,选择“新建”,选择“表”,在右边的新视窗中输入列名以及数据类型,选择输入[HOOK_NUM]、[WIND_SPEED]、[SIN_ANGLE]、[PROCESS_TAG]、[SHOT_SPEED]、[SHIP_SPEED],数据类型根据不同变量不同设置,需要与WinCC中的变量类型相匹配,点击保存,命名为“最佳参数表”。
最后使用Excel作为中间工具,将最佳的参数导入SQL Server数据库中。右击“最佳参数数据库”选择“任务”,点击“导入数据”,出现数据库导入和导出向导视窗,数据源选择Microsoft Excel,填入正确路径,点击“Next”。“目标”选择“Microsoft OLE DB Provider for SQL Server”,“数据库”下拉选择“最佳参数数据库”,点击“Next”,默认设置,点击“Next”。“目标”下拉选择“[dbo].[最佳参数表]”,点击“编辑映射”,将相关参数一一对应确认后点击确定,点击“Next”。接下来的新视窗全部默认设置选择“Next”完成所有操作,完成所有的参数导入。
3.3 设置SIMATIC WinCC Explorer组态软件
打开SIMATIC WinCC Explorer软件,点击“文件”选择“新建”,选择“单用户项目”,点击“确认”。
打开变量管理窗口,右击“变量管理”,点击OPC选项,添加OPC驱动,如图8所示。右击OPC下的“OPC Groups”,点击“系统参数”,打开OPC管理条目,等待片刻,加载出本地计算机,选中“S7200SMART.OPCServer”,点击浏览服务器,勾选“读访问”与“写访问”,点击“下一步”,如图9所示。选择所需要的变量条目,点击 “添加条目”,完成变量的设置。
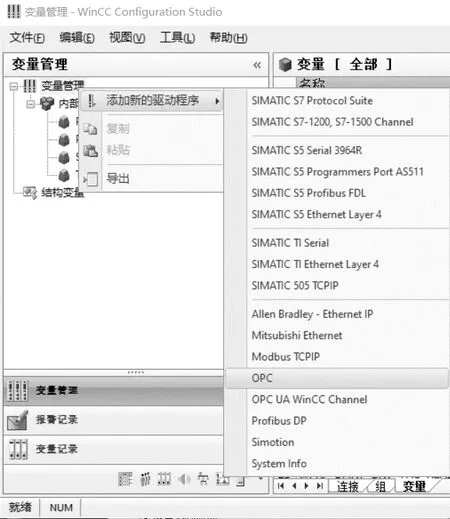
图8 添加OPC驱动

图9 添加变量
打开图形界面,将变量作为输入输出域添加到界面上,添加2个按钮“获取最佳参数”、“开始投绳”,给“开始投绳”赋予动作开始的中间变量M0.0,相当于运行开关按钮,给“获取最佳参数”添加鼠标单击的VBS脚本事件,用于获取最佳的动作参数,主要程序如下所示。
‘读取变量
data7=HMIRuntime.Tags (“HOOK_NUM”).Read’读取钩子数
data8=HMIRuntime.Tags (“WIND_SPEED”).Read’读取风速
data9=HMIRuntime.Tags (“SIN_ANGLE”).Read’读取风舷角正弦值
‘在SQL数据库中查找相应数据
sSql=”SELECT*FROM最佳参数表 WHERE HOOK_NUM=‘”&data7&”’AndWIND_SPEED=‘”&data8&”’andSIN_ANGLE=‘”&data9&”’;”
‘显示到输入/输出域
HMIRuntime.Tags(“PROCESS_TAG”).Write data4‘写入挂支线的时间间隔
HMIRuntime.Tags(“SHOT_SPEED”).Write data5‘写入投绳速度
HMIRuntime.Tags(“SHIP_SPEED”).Write data6‘写入船速
上面的data7,data8,data9变量为在Wincc组态界面所输入的查询变量HOOK_NUM(钩子数)以及PLC上传的通过传感器获取的环境变量WIND_SPEED、SIN_ANGLE(风速、风舷角正弦值),结合后面的SELECT语句,将输入变量与数据库最佳参数表中的参数比较,若有三个参数都对应相等,则取出该行值,并显示到输入/输出域中,同时输入/输出域所关联的PROCESS_TAG、SHOT_SPEED、SHIP_SPEED三个变量也被赋予最佳的控制参数,从而通过OPC协议改变PLC程序中挂支线的时间间隔、投绳速度、船速相对应地址的变量值。
4 实验验证
为了验证本文所述的基于PLC的投绳机控制软件部分,现输入已有的可靠数据进行验证,通过SIMATIC WinCC Explorer的组态窗口查看PLC通过PC上位机获取的控制量(挂支线的时间间隔、投绳速度、船速)与已有的可靠数据中的最佳控制量进行对比,如图10所示。根据所给定的钩子数、风速、风舷角正弦值获得了相对应的控制参数,验证整个控制软件系统的可靠性。

图10 SIMATIC WinCC Explorer组态窗口
5 结语
本文介绍了PLC应用于金枪鱼延绳钓投绳机部分的基本原理以及传感器、PLC下位机、PC上位机相互之间的通讯原理,重点阐述了基于PLC的投绳机控制部分的具体运用,其中主要包括金枪鱼延绳钓吊钩钩深与钩子数、风向角、风速、风弦角、船速,挂支线的时间间隔、投绳速度的关系以及金枪鱼延绳钓投绳机控制部分的软硬件设计。本文所介绍的基于PLC控制的金枪鱼延绳钓自动投绳机将为现有的半自动的投绳机自动化升级提供参考。随着机械自动化的迅速发展,基于PLC控制的金枪鱼延绳钓装置也将会更加自动化和智能化。
猜你喜欢
趣味(数学)(2022年3期)2022-06-02
军事文摘(2021年22期)2022-01-18
阅读与作文(小学高年级版)(2021年8期)2021-09-12
少年文艺·我爱写作文(2019年8期)2019-09-12
商周刊(2018年19期)2018-12-06
中国诗歌(2018年6期)2018-11-14
科学中国人(2017年14期)2017-01-28
小猕猴学习画刊(2015年10期)2015-10-26
中国信息技术教育(2015年22期)2015-09-10
新课程·上旬(2014年6期)2014-08-22
