PMSM 电流鲁棒性增量预测控制
2022-10-26 07:03张硕孙永禄赵明威周莹
北京理工大学学报 2022年10期
张硕,孙永禄,赵明威,周莹
(北京理工大学 机械与车辆学院, 北京 100081)
近年来,国家大力发展新能源汽车产业,而永磁同步电机由于其能源利用率高,控制性能好,结构简单,体积小被广泛应用于电动汽车动力系统中. 同时新能源汽车产业的高速发展也推动了电机控制系统的进步[1]. 目前学者们已经研究了很多电机控制策略,如比例积分线性控制、直接转矩控制[2]、电流预测控制[3]等等. 与其他控制算法相比电流预测控制具有算法结构简单和更好的动态性能等优点. 根据每个周期发送电压矢量的个数可以分为单矢量预测控制和无差拍预测控制. 与单矢量预测控制或者有限集模型预测控制算法相比,无差拍电流预测控制算法具有更小的计算量,良好的动态响应等优点,文中采用无差拍电流预测控制方法,通过空间脉宽调制技术将计算出预测电压转换为逆变器开关信号作用于电机.
无差拍电流预测控制性能依赖于准确的电机离散化数学模型,电机参数(尤其是定子电感和磁链)发生变化会严重影响控制系统的dq轴电流跟随情况和定子电流稳态谐波含量. 而结构老化、环境温度等因素都会造成电机初始参数发生变化. 针对上述问题,学者们做了很多研究,大体分为两类:利用参数辨识算法辨识出电机参数将其应用到控制系统中;利用各种观测器对预测电压进行补偿. 王涛等[4]采用模型参考自适应算法对定子电感和电阻进行参数辨识,并以此为基础设计了永磁同步电机控制系统,但是该辨识算法只有在电机运行进入稳定状态才能使辨识算法结果达到理想值,而且该辨识算法无法对磁链进行有效辨识. ZHOU 等[5]为了减少电机参数之间的相互影响利用误差模型将电机参数进行解耦计算,并利用卡尔曼滤波器对参数进行识别,避免了参数变化带来的影响,但是其引入的卡尔曼滤波器参数调试工作繁琐,耗费时间长,并不适用于实际工程应用. WANG 等[6]利用龙伯格观测器对预测电压进行一定补偿,有效地消除了参数扰动的影响,利用函数代替固定的观测器增益参数解决了龙伯格观测器在电机运行初始阶段出现扰动峰值的问题. YANG等[7]在建立包含增量式电机数学模型的基础上消掉预测模型中磁链参数,并通过扩展状态观测器有效观测定子电感在电机运行中发生变化带来的扰动,对其进行一定的补偿. 王伟华等[8]将增量模型与参考模型自适应算法相结合,在线辨识出定子电感参数,并将辨识结果应用于控制系统中.
在上述学者研究的基础上,文中提出基于龙伯格观测器的增量预测控制方法. 首先通过将相邻两步预测做差建立起增量预测模型[9-10],消除了磁链变化引起的电流跟随误差,减少了磁链参数辨识所带来的计算量. 接着为了解决定子电感变化引起的定子电流谐波含量增加的问题,将龙伯格观测器加入到预测控制系统,对定子电感不确定性误差进行补偿.
1 PMSM 电流预测增量模型
1.1 传统无差拍电流预测控制
三相永磁同步电机是一个十分复杂的强耦合非线性系统,文中为了便于分析,做以下假设:三相永磁同步电机为理想电机;忽略电机中的涡流和磁滞损耗、铁心的饱和;电机中的电流为对称的三相正弦波电流,则三相永磁同步电机的电压方程可以表示为
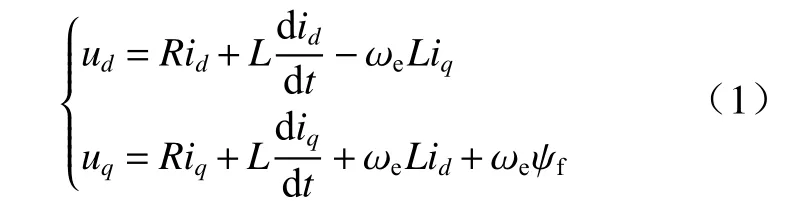
式中:ud和uq分别为定子电压在d轴和q轴旋转坐标系的分量;id和iq分别为定子电流在d轴和q轴旋转坐标系的分量;R为着绕组电阻,L为着定子电感,ψf为着永磁体的磁链, ωe则为着电机的电角速度. 文中的研究对象为表贴式三相永磁同步电机,因此q轴电感与d轴电感相等.
由于系统控制周期很短,认为T足够小,假设相邻时刻的电角速度近似相等,因此无差拍电流预测模型的一阶欧拉离散形式可以用以下式子表示,即通过第k时刻的dq轴采样电流来计算第(k+1)时刻的预测电流,在下式中id(k+1)和iq(k+1)分别为着第(k+1)时刻的定子d轴电流和q轴电流,id(k)和iq(k)分别为着第k时刻的定子d轴电流和q轴电流,T为采样时间.
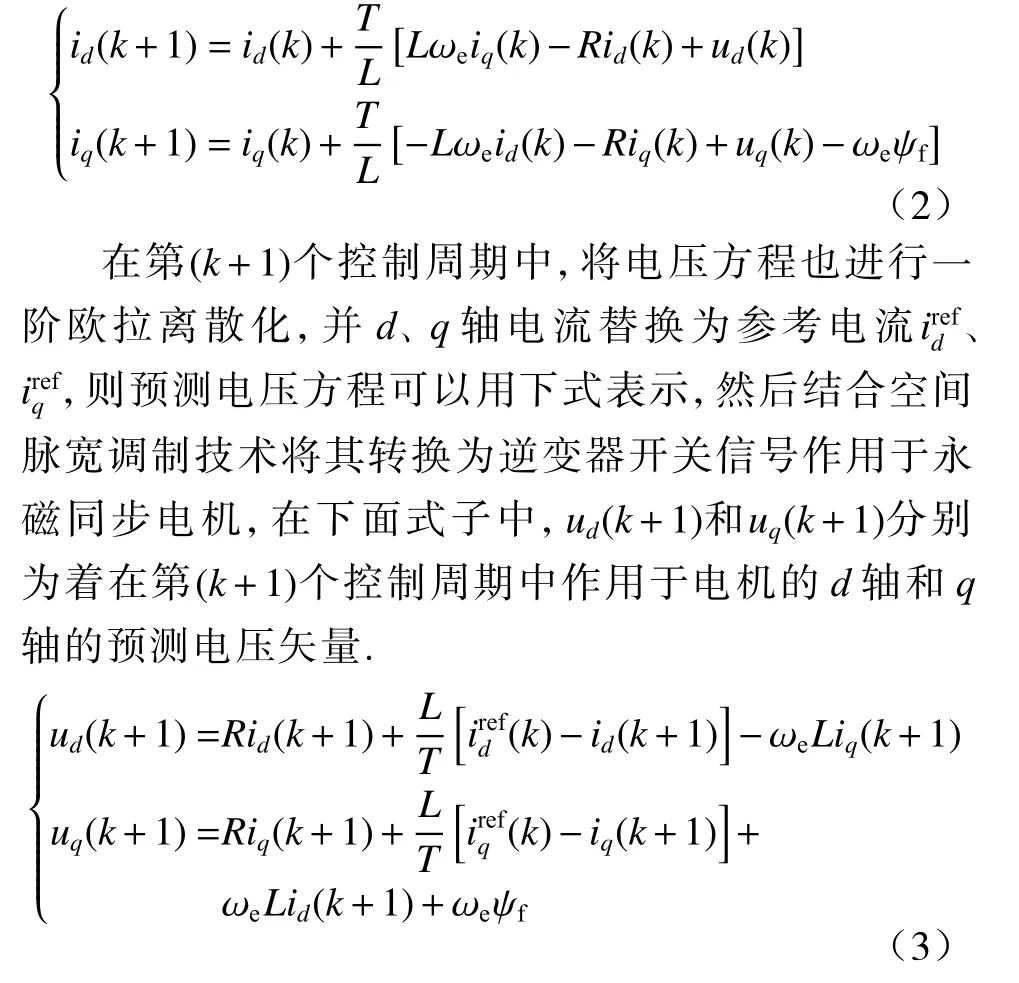
通过分析上式可以发现,预测控制模型中包含电机电感、电阻和磁链参数,在实际应用当中这些值往往通过离线测量来获得,但是当周围环境发生变化比如温度等或者电机运行时间长了以后电机的参数往往会发生变化,这也就导致预测电压就会产生误差,进而造成电机控制性能变差. 因此,无差拍电流预测模型的控制性能严重依赖模型参数.
1.2 增量预测模型
通过以上分析可以发现磁链是十分重要的控制参数,而且只出现在q轴的预测电流和预测电压模型中,为了消除磁链发生变化对预测控制性能的影响,文中引入增量预测模型.
增量预测模型需要依赖相邻两个时刻的预测电流,将两个相邻时刻预测电流做差即可以消除q轴预测电流模型中的磁链,实现无磁链增量预测控制.类似于第(k+1)时刻的离散化预测电流式(2),第k时刻的离散化预测电流可以表示为
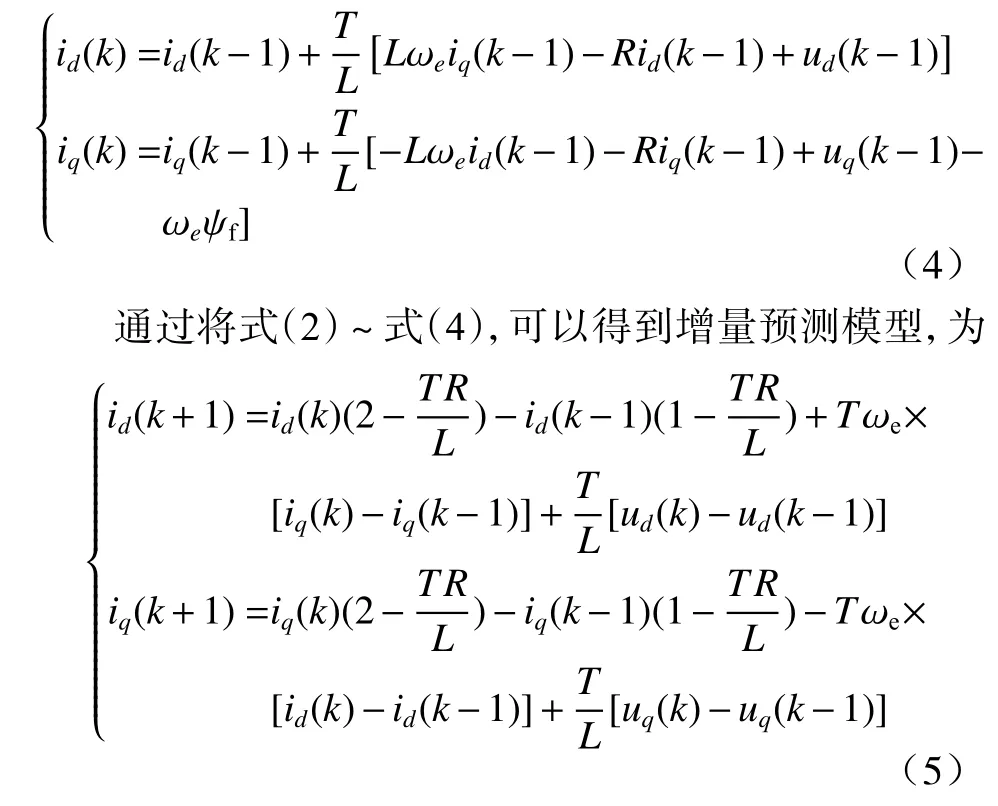
从式(5)中可以发现,不同于传统无差拍电流预测模型,增量预测模型摆脱了磁链变化对控制性能的影响.
和无差拍增量电流预测模型一样,将相邻两时刻离散化的预测电压做差,即式(3)~(6),则增量模型的预测电压表示为
1.3 带有龙伯格观测器的增量模型
另一个电机参数定子电感对预测模型的控制性能也起到了至关重要的作用,当电感参数失配时,会造成控制系统不稳定,产生电流跟踪误差等负面影响. 为了消除这种负面影响,文中在增量预测模型基础上引入龙伯格观测器.
根据式(1),当电感、电阻参数发生变化时,将电机电压方程表示为
其中fd和fq是电感参数发生变化时产生的扰动:
相邻控制周期电机参数变化很慢,可以忽略不计,认为fd和fq保持不变. 龙伯格观测器可以设计为
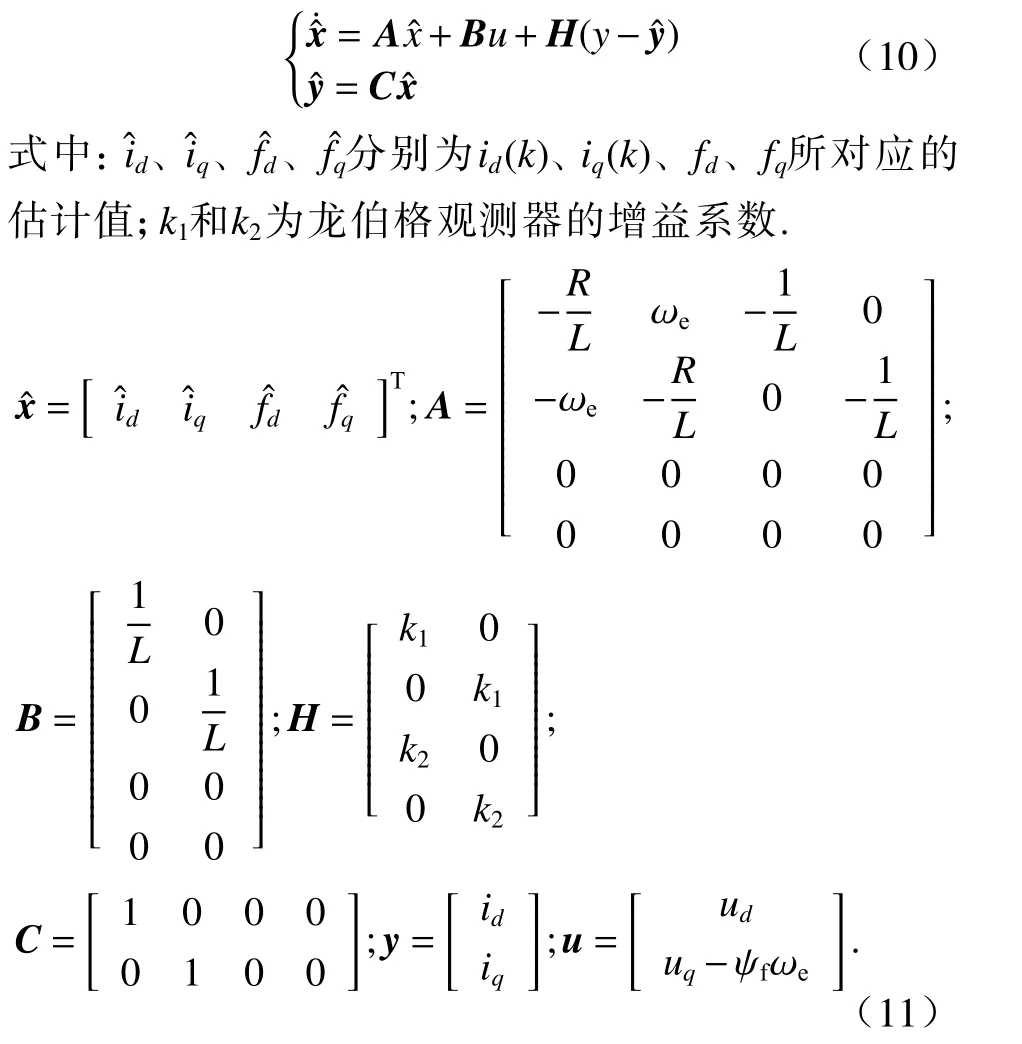
将式(10)采用一阶欧拉离散化获得带有扰动补偿的电流预测模型,即:
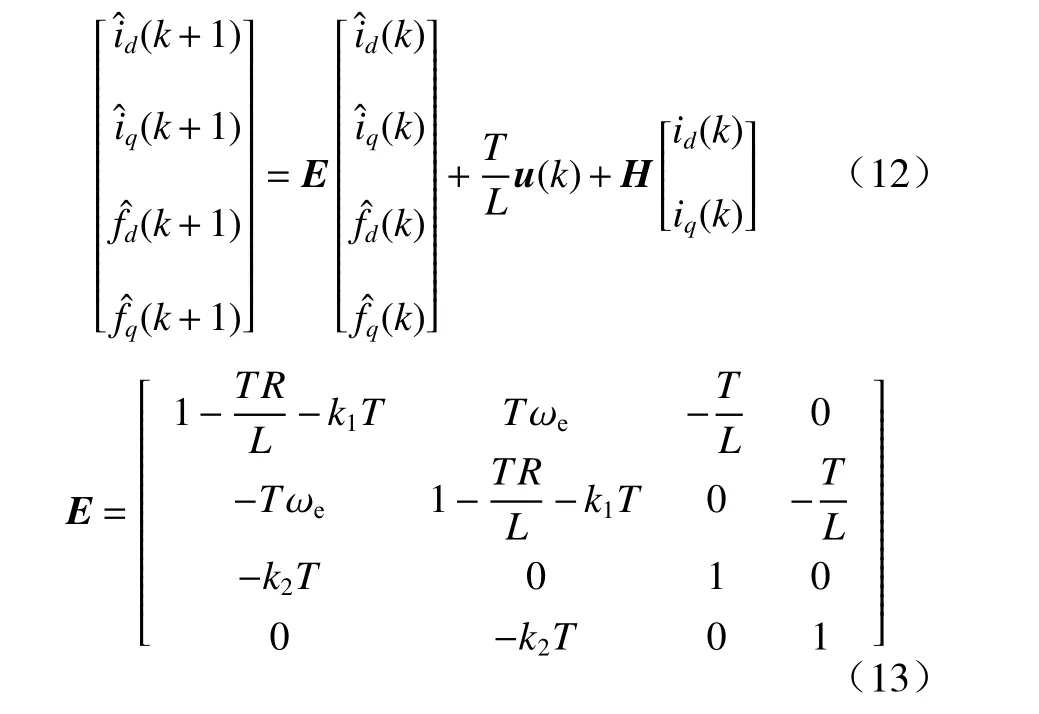
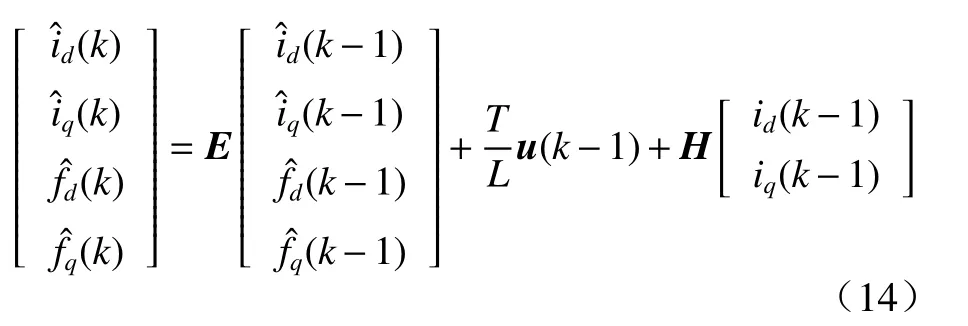
由于之间假设系统周期T非常短,所以可以认为E中的Tωe和TR/L近似等于0. 根据第k+1时刻的龙伯格离散化电流预测模型可以推导出第k时刻的模型,即下式:
将式(11)(12)相减,可以得到带有龙伯格观测器的增量电流预测模型,为
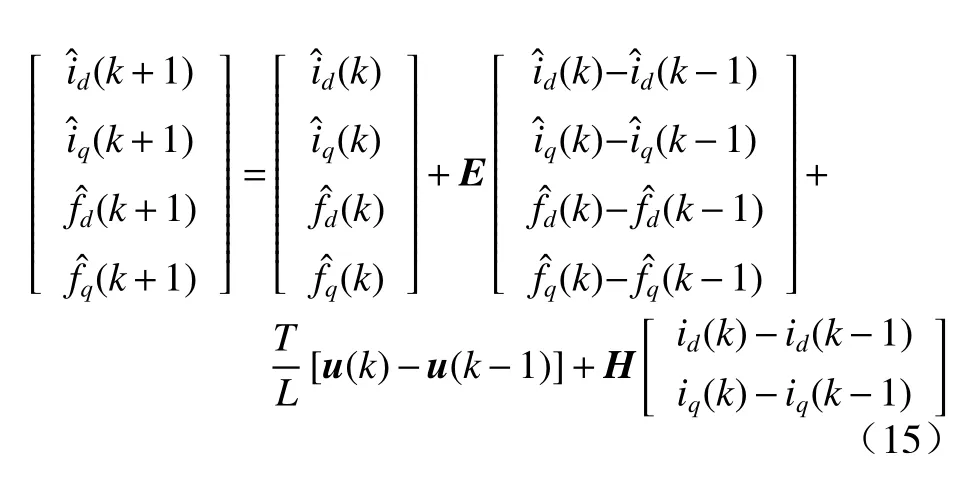
在消除磁链变化对预测电流影响的同时,通过扰动补偿抑制了绕组电阻和定子电感变化对预测电流的影响. 接着根据式(3)、式(6)以及式(11)可以推导出第k时刻和第k+1 时刻带有龙伯格观测器扰动补偿的电压预测模型,如式(16)~(17)所示.
最后将推导出的第k时刻和第k+1 时刻的电压预测模型做差可以得到带有龙伯格观测器的增量电压预测模型,如式(18)所示.

通过系统稳定性分析,并在Matlab/Simulink 平台上进行大量仿真实验后,将增益系数设定为k1=9000、k2=-9000.
图1 为带于龙伯格观测器的增量预测模型控制算法的原理框图,主要由以下几部分构成:速度环PI 控制器、=0、增量预测模型、龙伯格观测器、SVPWM 模块和逆变器.
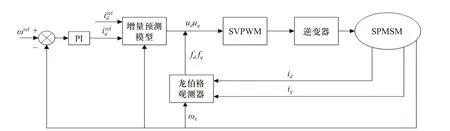
图1 带于龙伯格观测器的增量预测模型控制算法的原理框图Fig. 1 The schematic block diagram of incremental predictive model control algorithm with Luenberger observer
2 仿真分析
为了初步地分析对比传统DPCC 和文中 提出方法在抑制参数失配方面的效果,在Matlab/Simulink环境中搭建三相永磁同步电机控制系统仿真模型.电机参数为:永磁体磁链为0.166 7 Wb,绕组电阻为0.365 Ω,dq轴定子电感为1.225 mH,级数为4,额定功率为1 kW,额定转矩为10 N·m. 开关频率为20 kHz,采样时间设为50 μs.
在仿真系统中,实验速度设定为800 r/min,扭矩在0.5 秒时由5 N·m 跃进到10 N·m. 图2(a)显示了2倍电感失配采用原始DPCC 方法时dq轴电流,2(b)显示了2 倍电感失配采用新方法时dq轴电流. 从2(a)中可以看出,原始DPCC 的dq轴电流谐波很大,控制效果不好. 从2(b)中可以看出由于采用了新方法,定子电感失配造成的扰动得到了很好的抑制,电流谐波含量明显减少,系统稳态性能得到提升,初步验证文中所提方法的有效性.
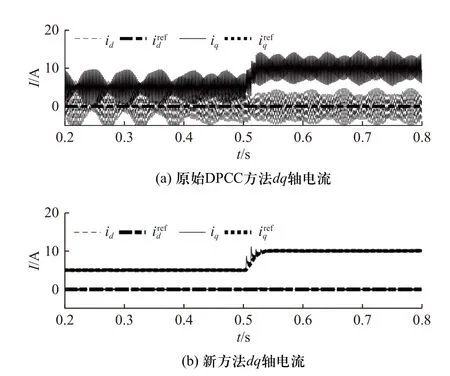
图2 定子电感2 倍失配时仿真结果Fig. 2 Simulation results when stator inductance is twice mismatched
与定子电感失配仿真条件一样,图3(a)为2 倍磁链失配采用原始DPCC 方法时dq轴电流,3(b)显示了2 倍磁链失配采用新方法时dq轴电流,图4(a)仿真原始DPCC 方法在磁链0.5 倍失配情况下的dq轴电流,4(b)显示了0.5 倍磁链失配采用新方法时dq 轴电流. 实验结果显示,采用原始DPCC 方法,当磁链2 倍失配时,测得q轴电流总是大于速度环参考q轴电流;当磁链0.5 倍失配时,测得q轴电流总是小于速度环参考q轴电流;但是采用文中 所提方法可以基本消除电流跟随误差,使得测得电流很好地跟随速度环参考电流.
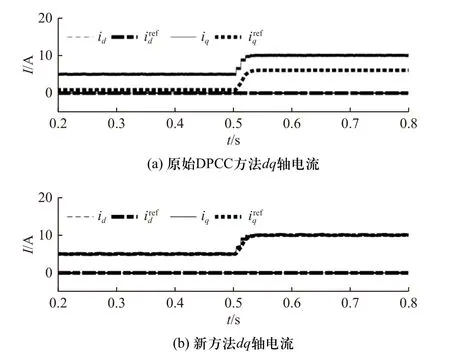
图3 永磁体磁链2 倍失配时仿真结果Fig. 3 Simulation results when flux linkage of permanent magnet is twice mismatched
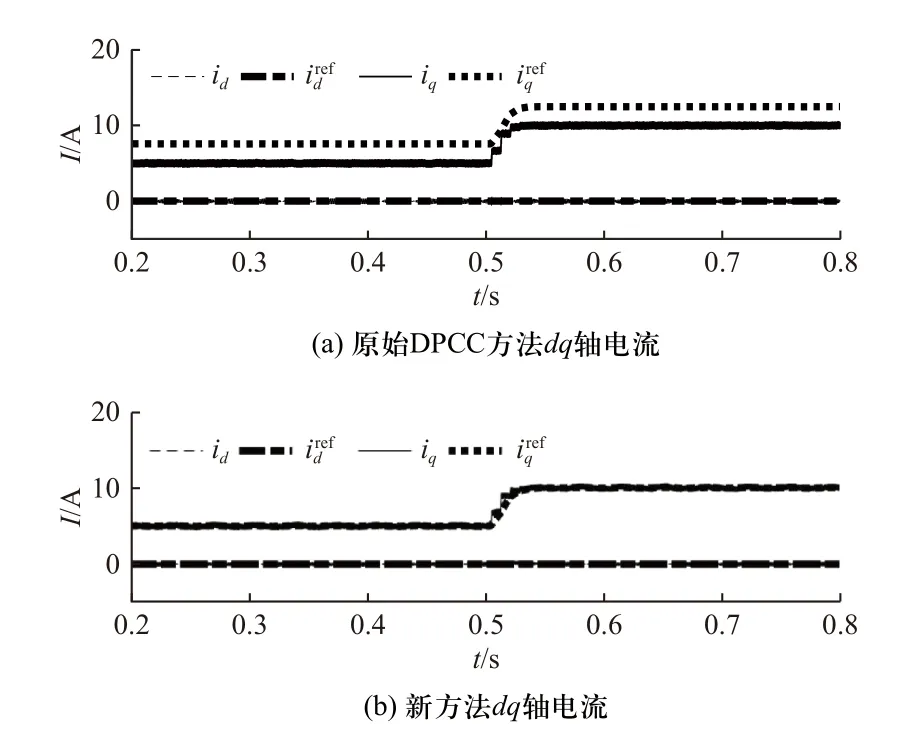
图4 永磁体磁链0.5 倍失配时仿真结果Fig. 4 Simulation results when flux linkage of permanent magnet in 0.5 times mismatched
图5(a)和5(b)分别显示定子电感和磁链同时2倍失配原始DPCC 方法和新方法的dq轴电流情况.从图中可以看出,采用原始DPCC 方法,dq轴电流波动很大,并且测得q轴电流总体大于速度环参考q轴电流;采用文中 所提方法可以很好地减少电流波动,而且q轴电流可以很好的跟随速度环参考q轴电流,抑制参数失配带来的不良影响.
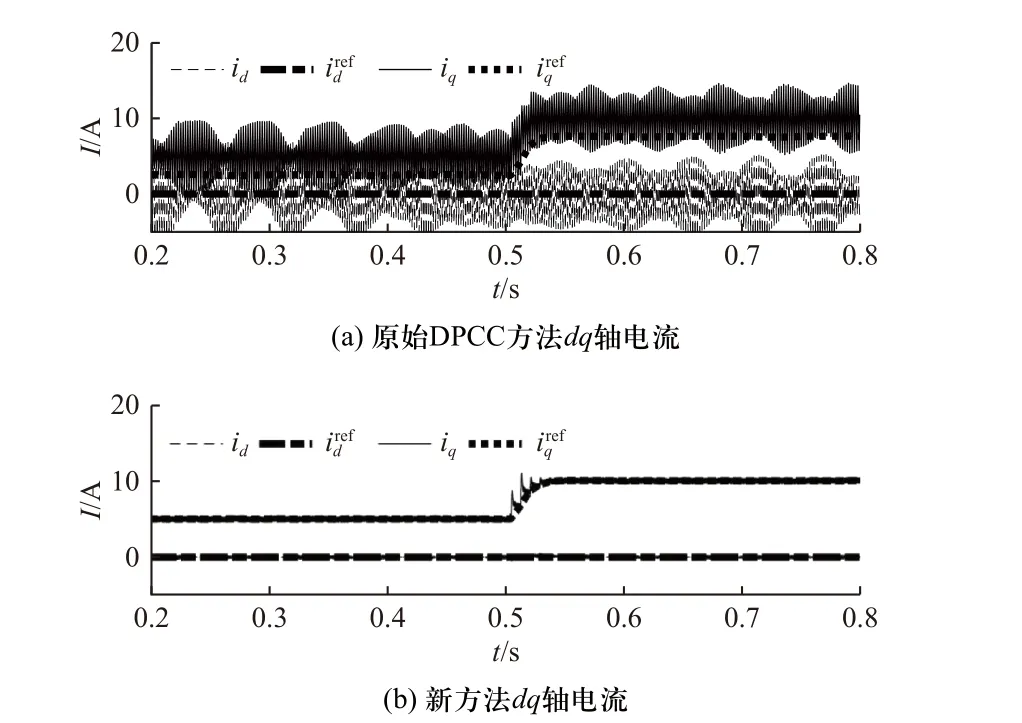
图5 定子电感和磁链同时2 倍失配时仿真结果Fig. 5 Simulation results when the stator inductance and flux linkage are mismatched twice at the same time
3 实验结果
为了验证文中 所提方法的有效性,在一台表贴式永磁同步电机上做了一系列实验,电机参数与仿真模型参数一致,实验电压设定为110 伏. 驱动平台如图6 所示,由控制板、驱动板、旋变板、驱动电机、负载电机、PC 机、电源以及扭矩分析仪组成. DSP芯片选用TMS320F28377d,时钟频率可达200 MHz.
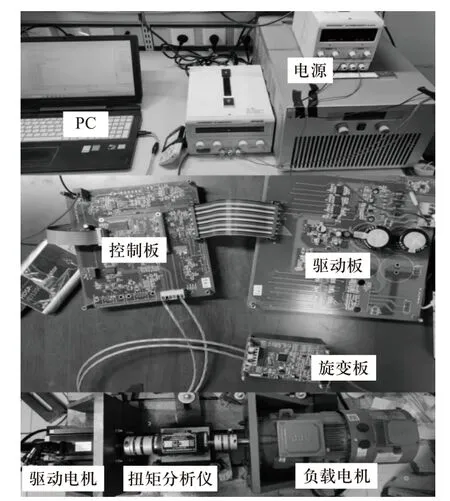
图6 SPMSM 实验驱动平台Fig. 6 SPMSM experimental driving platform
图7(a)为定子电感3 倍失配情况下原始DPCC 方法的A 相电流,7(b)为定子电感3 倍失配情况下新方法的A 相电流. 稳态实验条件,转速为800 r/min,转矩设定为4 N·m. 可以从图中看出原始DPCC 方法定子电流谐波含量较大,新方法可以有效减少定子电流谐波含量,并提高系统的稳态性能. 经计算,原始DPCC 方法定子电流总谐波失真为11.7%,而新方法可以减少到9.3%. 图8(a)为定子电感3 倍失配条件下原始DPCC 方法dq轴电流,8(b)为定子电感3倍失配条件下新方法dq轴电流. 实验条件,实验速度设为800 r/min,扭矩在0.375 秒时扭矩由2 N·m 跃进4 N·m.dq轴电流也验证了上述分析,新方法可以很好地减少电流谐波含量.
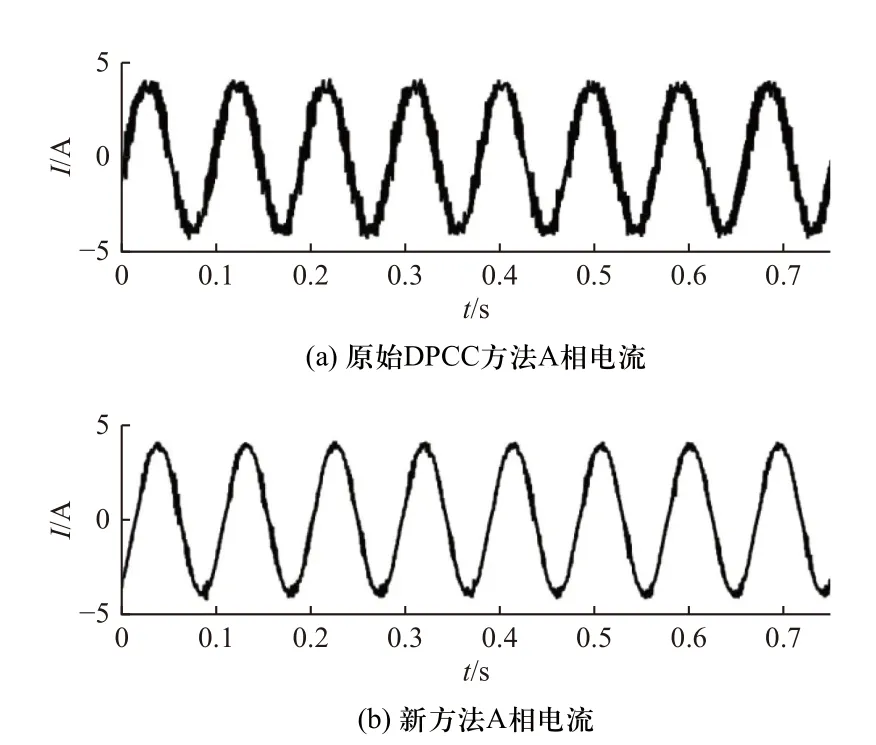
图7 定子电感3 倍失配时稳态实验结果Fig. 7 Steady state experimental results when the stator inductance in 3 times mismatched
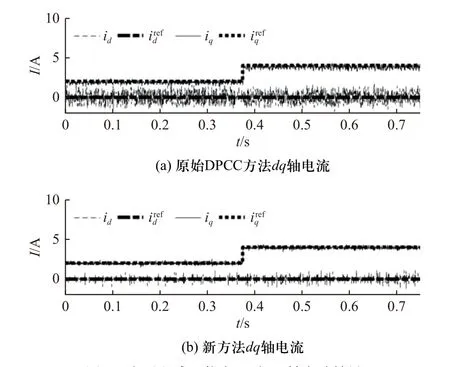
图8 定子电感3 倍失配时dq 轴实验结果Fig. 8 Experimental results of dq axis when the stator inductance in 3 times mismatched
图9(a)和9(b)分别显示磁链2 倍失配时原始DPCC 方法和新方法的dq 轴电流跟随速度环参考电流情况. 实验条件,实验速度设为800 r/min,扭矩在0.375 秒时扭矩由2 N·m 跃进4 N·m. 实验结果与仿真结果一样,当磁链2 倍失配时,原始DPCC 方法测得q轴电流总是大于速度环参考q轴电流,而新方法测得q轴电流可以很好地跟随速度环参考q轴电流,再次验证了文中 所提方法的有效性.图10(a)为电感3 倍失配、磁链2 倍失配和电阻0.1 倍失配同时发生时原始DPCC 方法dq轴电流,10(b)为电感3 倍失配、磁链2 倍失配和电阻0.1 倍失配同时发生时新方法方法dq轴电流. 实验条件,实验速度设为800 r/min,扭矩在0.375 秒时扭矩由2 N·m 跃进4 N·m. 从实验结果可以看出,当电机三个参数同时发生失配时,原始DPCC 方法dq轴电流不能跟随速度环参考dq轴电流,电流谐波含量也会偏大;采用新方法后参数失配不会对dq轴电流造成影响,可以明显改善电流控制效果.
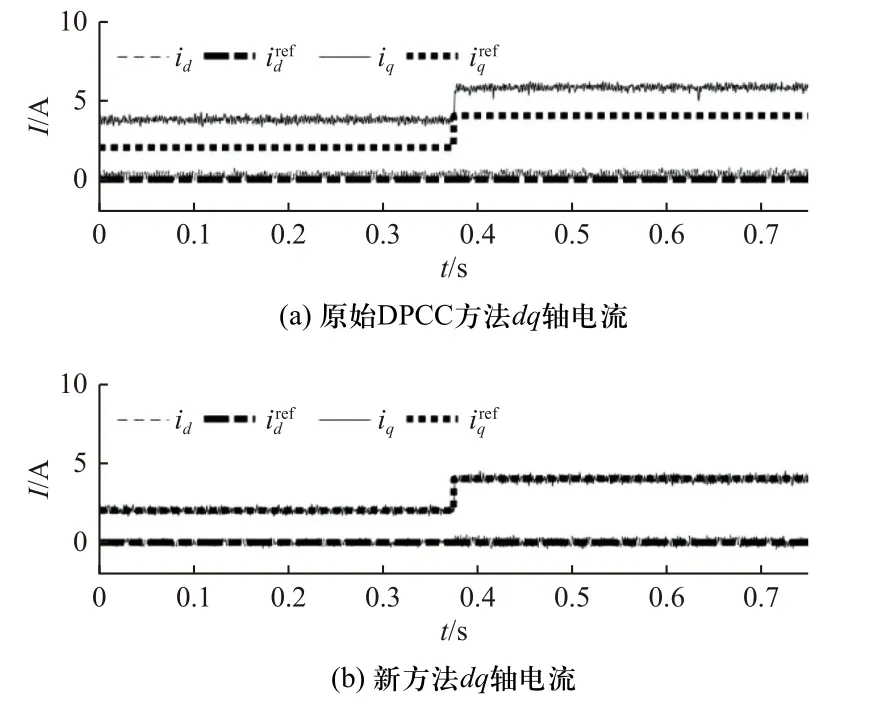
图9 永磁体磁链2 倍失配时实验结果Fig. 9 Experimental results when the flux linkage of permanent magnet in twice mismatched
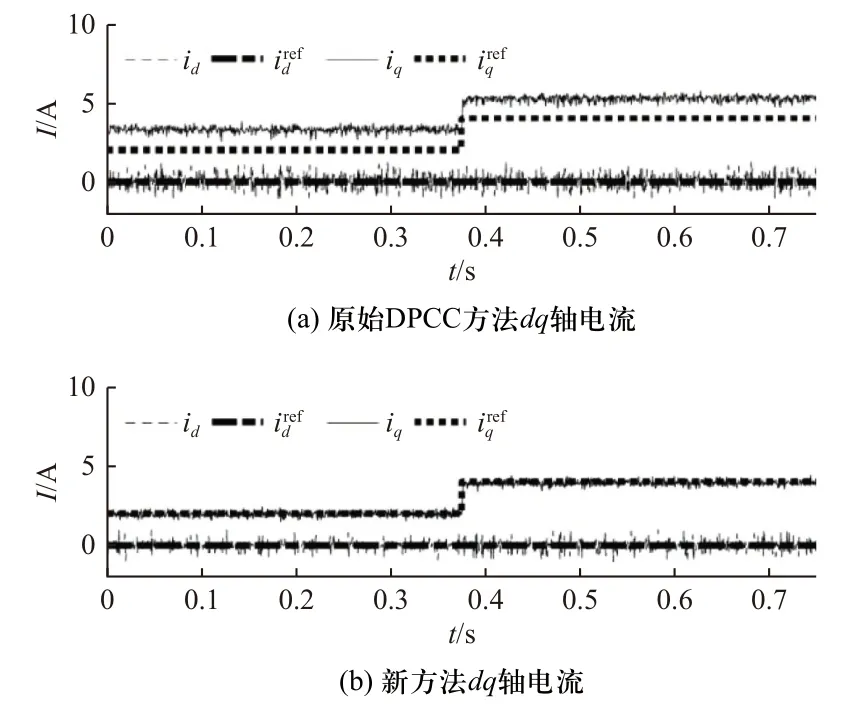
图10 电感3 倍失配、磁链2 倍失配和电阻0.1 倍失配时实验结果Fig. 10 Experimental results of three times inductance mismatch, two times flux linkage mismatch and 0.1 times resistance mismatch
4 结 论
文中提出一种基于龙伯格观测器的增量模型的无差拍电流预测控制(DPCC)方法. 与传统无差拍电流预测控制相比,新方法采用增量模型,可以在磁链参数失配甚至没有磁链参数的情况下电机依然运行良好. 另外,将增量模型与龙伯格观测器相结合,实现了抵抗电感参数失配的效果. 仿真和实验结果表明,文中提出的新方法可以有效抑制电感和磁链失配带来的不良影响.
猜你喜欢
时代汽车(2022年19期)2022-10-18
汽车实用技术(2022年13期)2022-07-19
科学家(2022年3期)2022-04-11
红领巾·探索(2020年2期)2020-05-19
电机与控制学报(2018年9期)2018-05-14
魅力中国(2016年52期)2017-09-01
科学与财富(2017年9期)2017-06-09
中学生数理化·高二版(2016年5期)2016-05-14
航空模型(2016年1期)2016-03-01
股市动态分析(2015年24期)2015-09-10