基于肺部电阻抗成像的机械通气控制系统
2022-10-19 01:09:40高贵锋姚佳烽
机械设计与制造工程 2022年9期
陈 奇,铁 磊,刘 凯,吴 阳,高贵锋,姚佳烽
(1.南京航空航天大学机电学院,江苏 南京 210016)(2.深圳市安保科技有限公司,广东 深圳 518052)
机械通气是一种拯救生命的干预措施,50多年来一直被广泛用于危重病人的管理[1]。机械通气过程中需要仔细校准压力,压力的大小和梯度不当都可诱导呼吸机肺损伤。闭环控制机械通气是指患者呼吸参数的变化会反馈回来作为闭环控制器的输入,影响呼吸机的输出。现有的通风系统中,常见的闭环控制器是线性PID反馈控制器,可以准确地跟踪目标压力[2]。在实际机械通气过程中还会加入其他指标如吸入氧浓度百分比FiO2、血氧饱和度SaO2、呼气末二氧化碳etCO2等,但还是无法直接监测肺泡复张和塌陷的情况。目前重症加强护理病房(ICU)患者的死亡率仍然很高,一个重要原因是缺乏在床边持续监测区域肺功能的设备。本文将选用电阻抗断层成像(electrical impedance tomography, EIT)传感器代替压力传感器,直接从肺复张可视化的角度控制风机进气。EIT技术正在迅速发展,目前已应用于床旁监测[3],相较于肺的压力和流量监测,EIT能够反映局部肺功能,对比计算机断层成像(CT)和血氧分析,可以迅速地评估肺部特征,且几乎没有副作用,具有实时和无辐射的优点。
国外学者首先提出将EIT应用于机械通气的想法,Adler等[4]在EIT临床应用方向预测中提出先确定某个EIT参数作为风险预测指标,只要达到一定的阈值就建议进行肺部复张操作,之后EIT参数值将成为控制通气自动化的一部分,实时保护病人通气。Schwaiberger等[5]将EIT加入到麻醉小猪的自动通气控制系统中,用于量化猪肺区域通气分布。Tregidgo等[6]将肺功能的常微分方程模型与EIT结合以产生体积电导率的时间序列值,这些值与总通气量进行区分和归一化,以恢复区域流量,为机械通气控制提供信息,论证了EIT控制机械通气的可能性。吴佳铭等[7]利用EIT监测急性呼吸窘迫综合症小猪模型机械通气时的呼气末正压(PEEP)滴定过程,提供了可视化依据,为临床应用打下了基础。
本文的研究目的是,将EIT的图像信息作为控制参数加入到呼吸机的控制系统中,观察风机的跟踪效果,为后期开展相对的临床自动化试验研究奠定良好的基础,以便自动选取更好的呼吸机参数治疗呼吸疾病。
1 控制系统原理
基于EIT图像控制的机械通风系统如图1所示,该系统是通过控制电压改变鼓风机的转速从而影响气流压力,使得气囊能够模拟人肺呼吸时的扩张与收缩。在模拟呼吸过程中贴在模拟胸腔的EIT传感器实时测量电导率变化同时得到EIT图像,控制器分析图像信息并控制风机调整风速,从而实现基于EIT传感器的闭环机械通气系统。

图1 基于EIT图像信息控制的机械通气原理图
1.1 肺力学建模
肺部模型如图2所示,其中PA表示肺泡压力,Pm表示口腔压力,即风机的出口压力,Paw表示气道损失压力,R和C分别表示气道阻力和气道顺应性。
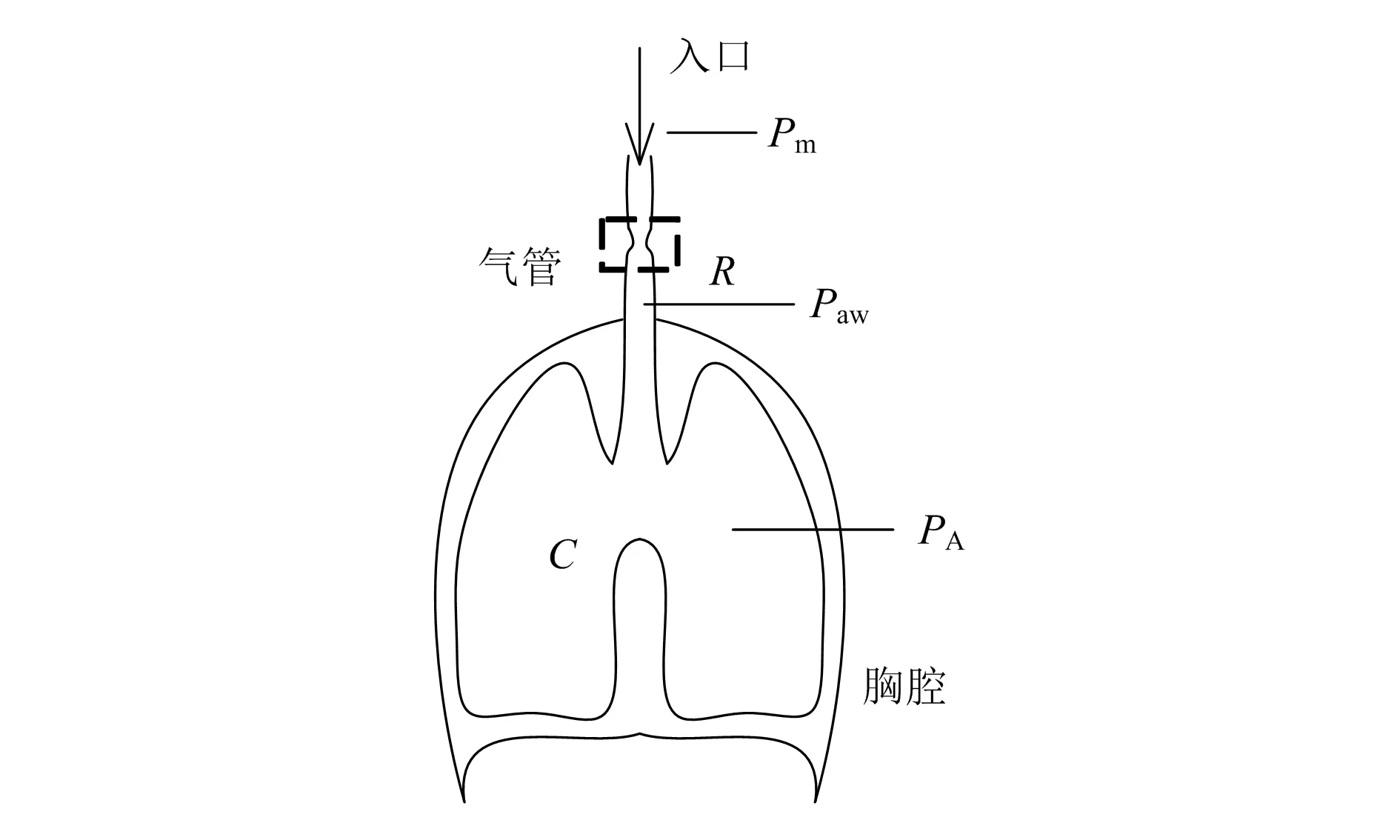
图2 肺部简化模型
常见的呼吸系统建模如式(1)所示,病人肺部的压力是口腔压力和气道阻力之差[8]:
PA=Pm-Paw
(1)
气道损失压力和肺泡压力主要与气道阻力和肺部顺应性有关。最简单的呼吸系统模型是线性单室模型:
(2)

呼吸系统的顺应性定义为每单位肺泡压力的变化带来的肺容量变化,如式(3)所示:
(3)
式中:ΔV和ΔPA分别表示肺容量和肺泡压力的变化。
根据医学上肺容量的划分,病人在平静呼吸时每次吸入或呼出的气量称为潮气容积,但是在平静呼气末时肺内还有一定气量,称为功能残气量FRC,其对肺泡分压具有一定的缓冲作用。因此,肺容积可表示为:
V=C·PA+FRC
(4)
气道阻力是气道内压力损失与流量的比值:
(5)
气道阻力可分为恒定阻力和与流量有关的阻力,用下列方程表示总气道阻力:
(6)
式中:R0为恒定的气道阻力;K为阻力系数。根据式(1)~(6),肺模型可表示为:
(7)
EIT测量的部位是第4至第5根肋骨间的肺的横截面,因此需要了解肺的体积与横截面面积的关系,文献[9]用CT结果展示了正常人体呼吸时肺内体积与各层横截面面积的关系,模型表示为:
(8)
式中;Acur为当前横截面面积;Atl为吸气末横截面面积;Vr为相对肺容量。Vr的计算公式为:
(9)
式中:Vlung为吸气末肺的体积。设RL为肺相对面积变化,计算公式为:
(10)
结合式(7)~(10),肺横截面积与压力关系的肺模型为:
(11)
1.2 EIT成像原理与仿真设计
在EIT实验过程中,假设激励电流恒定,EIT的逆问题(即图像重建)通过边界测量电压U和给定的电流密度J,来重建被测区域的电导率分布σ。基于灵敏度系数矩阵的图像重建算法,假定电导率分布变化较小时场域内敏感场分布近似不变,有
ΔU=J·Δσ
(12)
式中:ΔU表示电压测量值变化;Δσ表示场域内电导率变化;J为灵敏度系数矩阵。
EIT重建图像分辨率较低,主要是因为成像过程是严重非线性的、不适定的和病态的[10]。常用的解决方法是对EIT成像的目标泛函添加先验信息以进行正则化,最普遍的是采用吉洪诺夫(Tikhonov)正则化算法[11],算法的稳定性较好且成像速度快。该算法本质为求解如下目标泛函:
(13)
式中:λ为Tikhonov正则化系数。求解可得
Δσ=(JTJ+λI)-1JΔU
(14)
式中:I为单位矩阵。得到灵敏度矩阵和电压的测量值就能迅速计算出电导率,表明Tikhonov正则化算法能实时跟踪较大的肺部生理变化。
在肺部EIT中,动态成像可以观察到肺组织电生物阻抗的区域变化。人体在吸气过程中,肺泡壁被拉伸,导致组织阻抗局部增加,从而导致相应区域的电压测量值升高。
为了观察EIT对观测对象的面积变化的成像表现,通过COMSOL和MATLAB联合仿真,采用Tikhonov正则化算法成像,获得肺部面积变化的图像仿真。肺部轮廓信息来自Eidors。仿真采用相邻驱动模式,用16电极采集电压数据,一组数据共208个电压数据。为平衡采集速度和成像速度,有限元节点和三角单元网格个数分别为778和1 458。
呼吸过程中肺部形态的改变如图3所示[12],RL表示当前时刻肺横截面面积与吸气末肺横截面面积的比值。假设肺部电导率和胸腔电导率分别为0.5 mS/cm和2.0 mS/cm。

图3 呼吸过程中肺部形态的改变
1.3 机械通气仿真
使用Simulink建立肺部模型,设置参数FRC为2.3 L,C为2.57,R0为1,K为0.2,Vlung为4.71 L,将RL作为目标输入,RL初始值为0.62。由于模型存在非线性特征,为达到理想控制效果,本次仿真控制算法采用了模糊PID控制器。
1.3.1模糊PID控制器设计
控制器原理与具体试验流程如图4所示,图中RLd表示期望面积变化值,RLr表示实际面积变化值,两者的误差e和误差变化率e′作为模糊控制器的输入,ΔKp和ΔKi分别表示调整PID控制器的比例和积分参数的变化量。控制器设计包含隶属度函数的建立和模糊规则的制定。
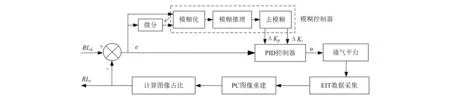
图4 试验流程图
首先设置e和e′的范围为[-0.5,0.5]和[-3,3],ΔKp和ΔKi的变化范围为[-0.5,0.5]和[-0.1,0.1]。将4个参数的变化范围划分为5个子集:负高(NH)、负低(NL)、零(ZO)、正低(PL)、正高(PH),模糊子集均设置为{NH,NL,ZO,PL,PH}。采用常见的三角形隶属度函数。
模糊规则决定控制器输入输出的映射关系,主要规则见表1,模糊规则的制定主要包含以下原则:

表1 ΔKp和ΔKi的模糊规则表
1)当|e|较小,|e′|较大,需要调小PID控制器的积分参数Ki,避免系统振荡;
2)当|e|较大,|e′|较小,适当调大比例参数Kp,减小误差;
3)当e与e′符号相反,表示正靠近期望值,应适当调大Kp和Ki,保证系统稳定。
1.3.2仿真结果
模拟普通人呼吸过程,周期为8 s,时间为16 s,得到的仿真结果如图5所示。由图5可知,从呼吸曲线中抽取的5个EIT肺部图像区域有明显的面积变化,且图中模糊PID响应曲线基本与期望值吻合,RLr最大误差为2.25%,平均误差为0.56%,对比传统PID仿真响应曲线的控制误差,说明模糊PID有较好的动态跟踪性能以及较低的控制误差。仿真结果表明,使用EIT的相对面积变化作为输入参数能够对通风系统进行较好地控制。
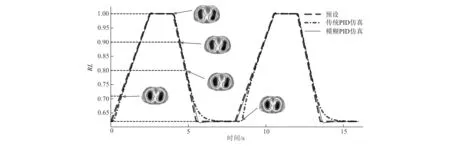
图5 仿真平台跟踪控制曲线
2 试验验证
2.1 试验平台设计
为了验证仿真结果进行了机械通气试验,试验平台如图6所示,分为EIT检测部分和气路平台。
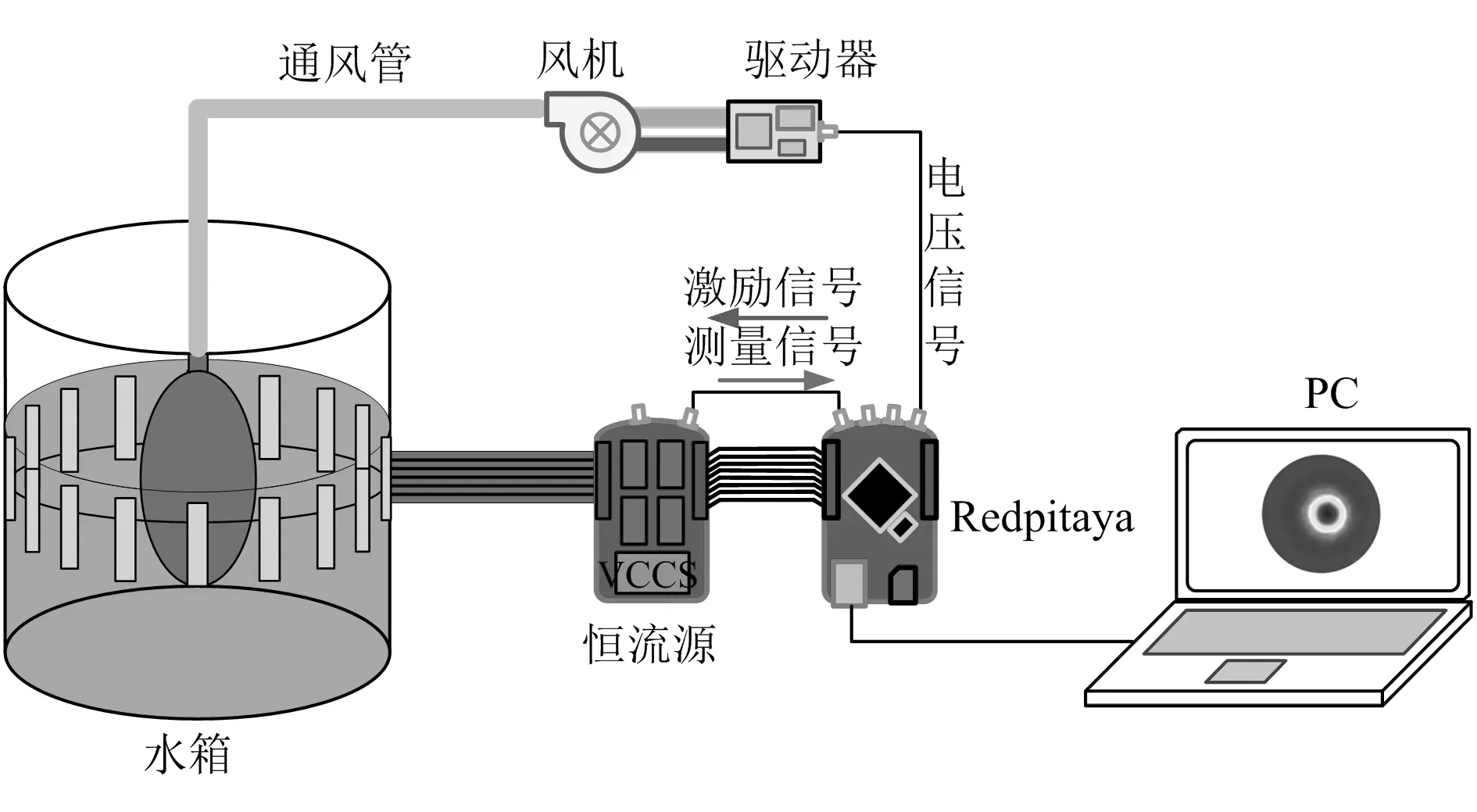
图6 试验平台原理图
气路平台使用体积变化明显的模拟肺气囊以及呼吸机的专用风机。将气囊置于水中通风模拟人体胸腔环境,控制器选用Redpitaya嵌入式平台。检测设备包括圆柱形水箱、采集控制板Redpitaya、压控电流源和多路复用器模块。水箱直径为300 mm,16个电极片水平均匀地分布在水箱内壁。压控电流源保证激励电流恒定为1 mA,多路复用器负责调整EIT激励和采集电极对。
2.2 试验结果与分析
PID控制器的初始比例参数Kp=2.4,积分参数Ki=0.26,微分参数Kd=0.5,期望轨迹与仿真相同。初始气囊的EIT成像面积占比为0.62。得到的试验跟踪误差曲线如图7所示。

图7 试验跟踪误差曲线
从图7的EIT图像中能够看出气囊收缩时EIT图像中间黑色区域变小,表示区域内的电导率发生变化。跟踪曲线基本符合预期,总体来说试验曲线较稳定,期望RL保持稳定阶段的误差都能稳定在0.5%以内,可以保证病人的肺泡扩张与气体交换完全。
3 结束语
本文提出了一种基于EIT成像的机械通气控制系统。EIT主要在人体第4肋骨和第5肋骨之间横向检测肺,重建图像信息中包含了肺的通气情况,因此本文提出了通气过程中压力与面积关系的肺部模型,另外考虑呼气末肺部会有残余气体,模型中加入了FRC初始条件。对呼吸过程中肺面积变化进行基于EIT图像相对面积变化的机械通气仿真,将RL作为控制参数加入仿真,对比了模糊PID与传统PID的控制效果,结果显示模糊PID控制器的响应与期望值吻合,EIT图像的相对面积变化可以作为机械通气的控制参数。在试验中将EIT技术加入到控制系统中,使用模糊PID控制算法,能够准确地控制气囊充放气,并跟踪重建图像的面积变化,说明EIT传感器有较高的稳定性。
试验结果验证了EIT图像参数RL可以作为控制呼吸机的参数,且模糊PID控制器具有较短的响应时间和较强的稳定性。
猜你喜欢
国际呼吸杂志(2019年22期)2019-12-09 09:20:26
国际呼吸杂志(2019年21期)2019-11-25 09:52:14
国际呼吸杂志(2019年20期)2019-11-23 08:46:06
学生天地(2019年29期)2019-08-25 08:52:32
国际呼吸杂志(2019年8期)2019-04-29 09:15:20
国际呼吸杂志(2019年8期)2019-04-29 09:15:12
国际呼吸杂志(2019年5期)2019-03-30 01:38:20
国际呼吸杂志(2019年3期)2019-03-01 05:39:06
国际呼吸杂志(2019年2期)2019-02-14 06:11:26
国际呼吸杂志(2019年2期)2019-02-14 06:11:26