
基于机器视觉的铁路闸瓦状态监测研究
2022-10-19 01:09苗旺龙李木存赖远桥
机械设计与制造工程 2022年9期
苗旺龙,贾 刚,李木存,赖远桥
(1.国能铁路装备有限责任公司陕西分公司,陕西 榆林 719316)(2.深圳市远望谷信息技术股份有限公司,广东 深圳 518052)
铁路运输是目前我国重要的交通运输方式之一,其安全性一直是研究热点[1-2]。闸瓦作为铁路机车常用的制动零部件,其通过与轮对踏面发生剧烈摩擦从而实现机车制动。这个过程会产生大量热能,极易造成闸瓦磨损甚至损坏[3],严重威胁机车运行安全,因此对铁路闸瓦状态进行有效监测具有重要意义。
当前,面向闸瓦独立监测的研究相对较少,人工目测仍然是主要的检测手段,这种检测手段检测效率较低,且准确率不高[4-5]。随着机器视觉技术的快速发展,为闸瓦状态自动监测提供了全新思路,学者们也相继提出了基于图像识别技术的闸瓦状态监测算法[6-7],然而受安装工艺等因素影响,闸瓦周边部件多,闸瓦图像背景相对复杂,给闸瓦机器视觉监测带来了不小的挑战。为此,本文提出一种基于机器视觉的铁路闸瓦状态监测方法,通过设计改进Canny算子和建立RBF神经网络监测模型,实现对闸瓦状态的有效监测。
1 闸瓦图像采集预处理系统
本文建立的闸瓦图像采集预处理系统如图1所示,系统主要零部件有CCD相机、补光光源、高速磁钢传感器、工控机、无线发射器、服务器。
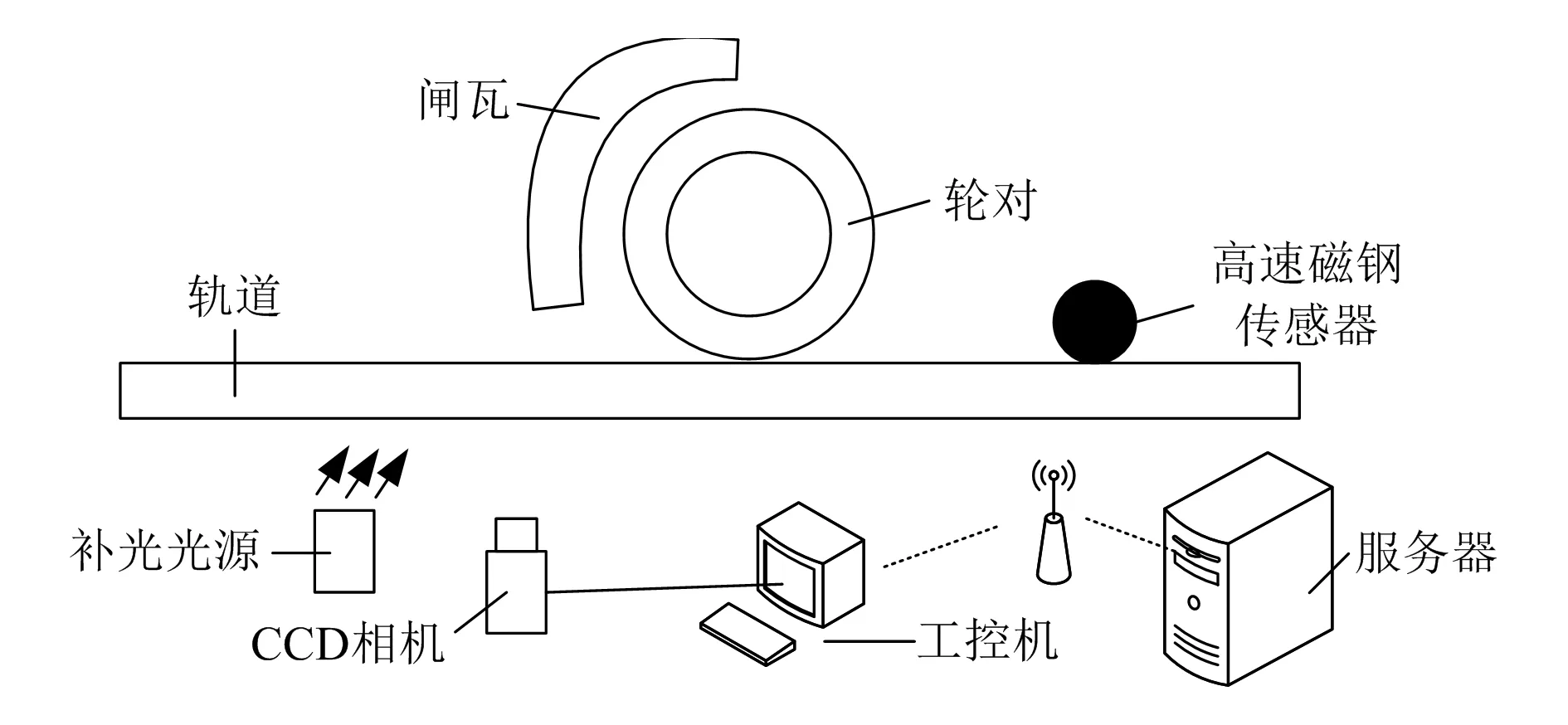
图1 闸瓦图像采集预处理系统
系统工作流程为:当机车与高速磁钢传感器的距离处于一定范围时,传感器产生高电平信号,触发CCD相机抓拍闸瓦图像,闸瓦图像传输到工控机,工控机对图像进行中值滤波[8]和灰度增强[9]处理后,传输到服务器端。在服务器端,调整Ostu算法[10]阈值大小,从而得到闸瓦分割图像,最后利用本文提出的闸瓦状态监测方法完成对闸瓦状态识别监测。
2 改进Canny算子边缘提取与闸瓦状态监测
图像边缘保留了图像基本的特征和信息,很大程度降低了计算机处理的数据量[11],有利于提高闸瓦监测速度。为此,本文对麻雀搜索算法(spar-row search algorithm,SSA)[12]进行改进,并利用改进的SSA(ISSA)优化Canny算子[13],以提高闸瓦分割图像边缘提取的效果。
2.1 麻雀搜索算法改进
SSA是一种新型仿生群智能计算技术,在连续问题优化领域表现出较好的收敛性能。SSA模拟麻雀群体觅食行为,根据个体适应度优劣,将麻雀划分为发现者XD、跟随者XF和警戒者XV3种类型,分别执行不同的进化方式,通过相互信息交流,最终实现问题优化求解。XD,XF和XV更新方式为:
(1)
(2)
(3)
式中:t为算法当前迭代次数;λ1,q为随机数;λ2为预警值;λ3为比例系数;Tmax为算法最大迭代次数;L为元素均为1的矩阵;S为安全值;A为由1、-1组成的向量,A+为A的广义逆矩阵;i为个体编号;Q为种群规模;Xw(t)为最差解;Xb(t)为最优解;ε为极小常数;f(XV(t))、f(Xb(t))为个体适应度。
(4)
(5)
(6)
(7)
2.2 改进Canny算子与边缘提取
Canny算子能够在尽可能保持图像边缘信息的同时,最大限度降低数据规模。Canny通过对图像进行高斯平滑滤波、梯度方向和梯度幅值计算、非极大值抑制以及阈值选取处理,最终得到图像边缘二值化图。
高阈值TH、低阈值TL以及高斯滤波标准差σ是Canny算子涉及的主要参数。由于(TH,TL,σ)取值直接决定了边缘提取效果,因此本文采用ISSA对(TH,TL,σ)进行优化,ISSA个体编码设置为X=(TH,TL,σ),目标函数设置为目标与背景的类间方差:
f(X)=β0(t)×β1(t)×(θ0(t)-θ1(t))2
(8)
式中:f(X)为X的目标函数值;β0(t)为小于TH的像素数量;β1(t)为大于TH的像素数量;θ0(t)为小于TH像素的平均灰度值;θ1(t)为大于TH像素的平均灰度值。ISSA通过迭代优化,最终得到最优Canny算子参数配置,图2所示为ISSA优化Canny算子参数实现流程图。
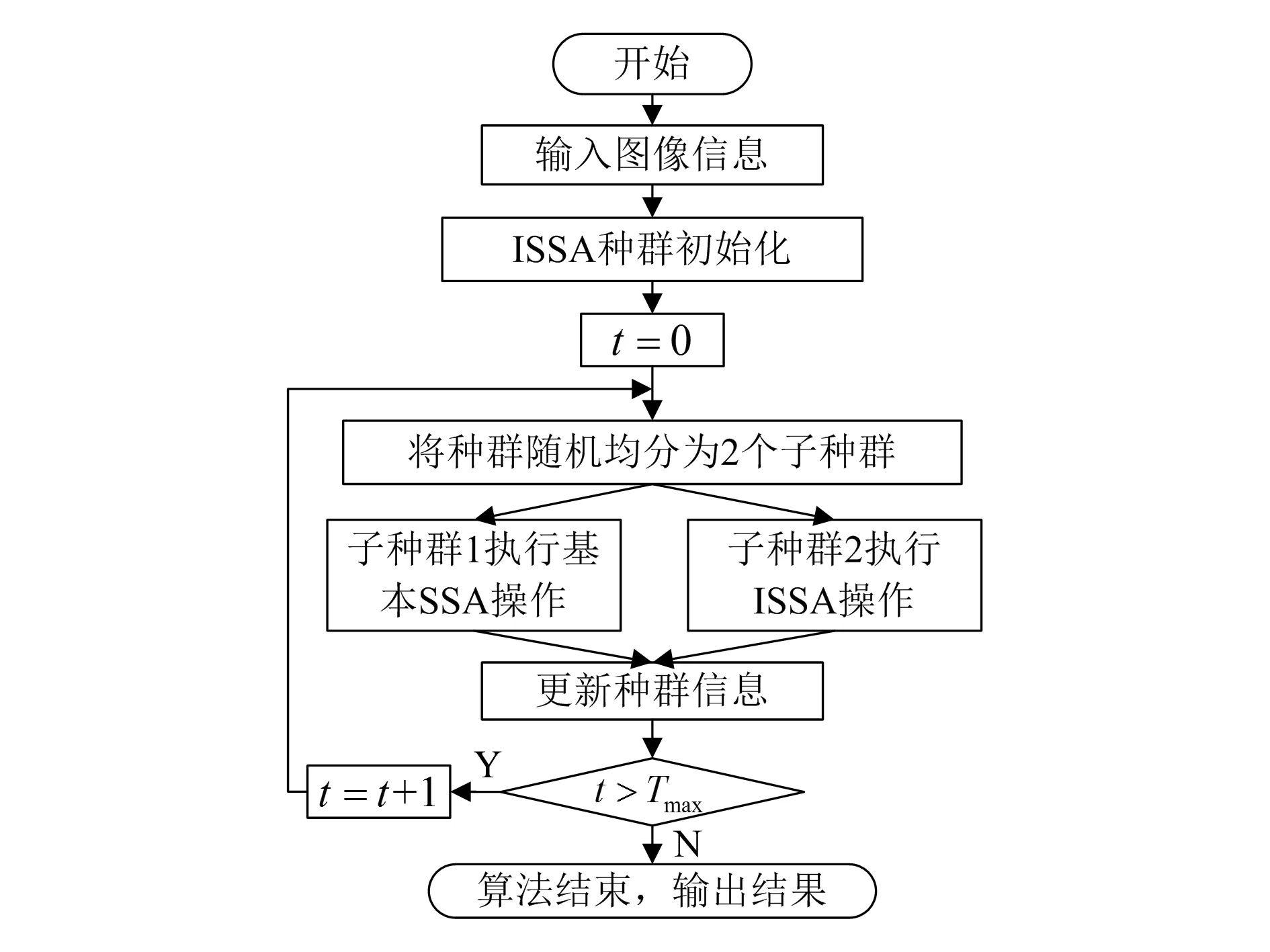
图2 ISSA优化Canny算子参数实现流程图
对于闸瓦分割图像I(x,y),利用改进的Canny算子进行边缘提取,得到I(x,y)边缘数据E。E作为闸瓦状态监测基础数据,通过训练学习,最终实现对闸瓦状态的识别监测。图3为改进Canny算子边缘提取示意图。
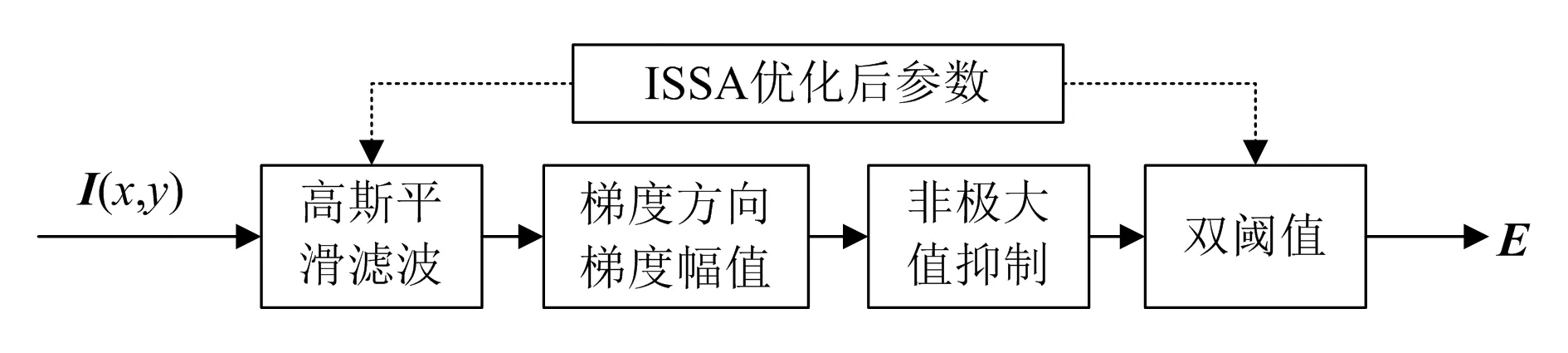
图3 改进Canny算子边缘提取示意图
2.3 闸瓦状态监测实现
常见的闸瓦状态有正常、熔渣、破损、断裂、位置偏移、丢失、有覆盖物7种,分别选取7种状态的闸瓦50个,共350个样本,利用闸瓦图像采集预处理系统对350个样本进行图像获取、处理、分割,并采用改进Canny算子提取边缘特征,得到训练样本集{Ei}i=1,…,350。建立闸瓦状态监测模型,采用径向基函数(radial basis function,RBF)神经网络对{Ei}i=1,…,350进行训练,并对待监测样本进行状态识别,图4为RBF神经网络示意图。

图4 RBF神经网络示意图
RBF神经网络由输入层、隐含层和输出层组成,其中隐含层利用φ(x)(本文选取高斯函数)对输入变量Ei进行映射转换:
hj=φ(‖Ei-cj‖2)j=1,…,q
(9)
式中:hj为Ei的映射转换输出值;q为隐含层神经元个数;cj为第j个神经元中心。
RBF神经网络需要设置的参数有C、高斯函数标准差σ和q,其中C=(c1,…,cq),采用ISSA对(C,σ,q)进行优化求解,得到最佳分类RBF神经网络模型。ISSA个体编码设置为X=(C,σ,q),目标函数设置为目标与背景的类间方差:
(10)

3 试验仿真
3.1 边缘提取
本文利用闸瓦图像采集预处理系统对训练样本进行图像采集处理,闸瓦表层涂白漆以增加对比度。ISSA参数设置如下:Q=300,Tmax=400,ωmax=1.2,ωmin=0.15。图5给出了不同Ostu阈值下的闸瓦分割图像,图6给出了本文提出的改进Canny算子、ACO-Canny算子[14]、Prewitt算子和基本Canny算子边缘提取结果。图7给出了ISSA与SSA、PSO算法(粒子群算法)优化Canny算子参数函数收敛曲线对比图。
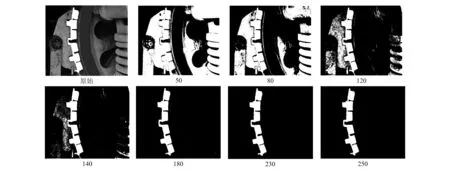
图5 不同Ostu阈值下的闸瓦分割图像
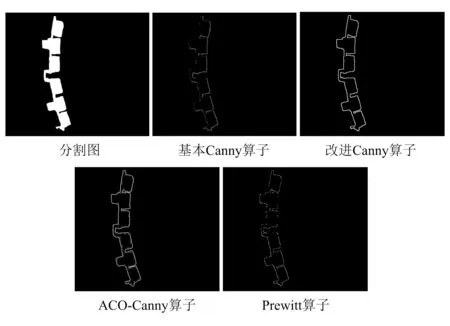
图6 不同算子边缘提取效果图
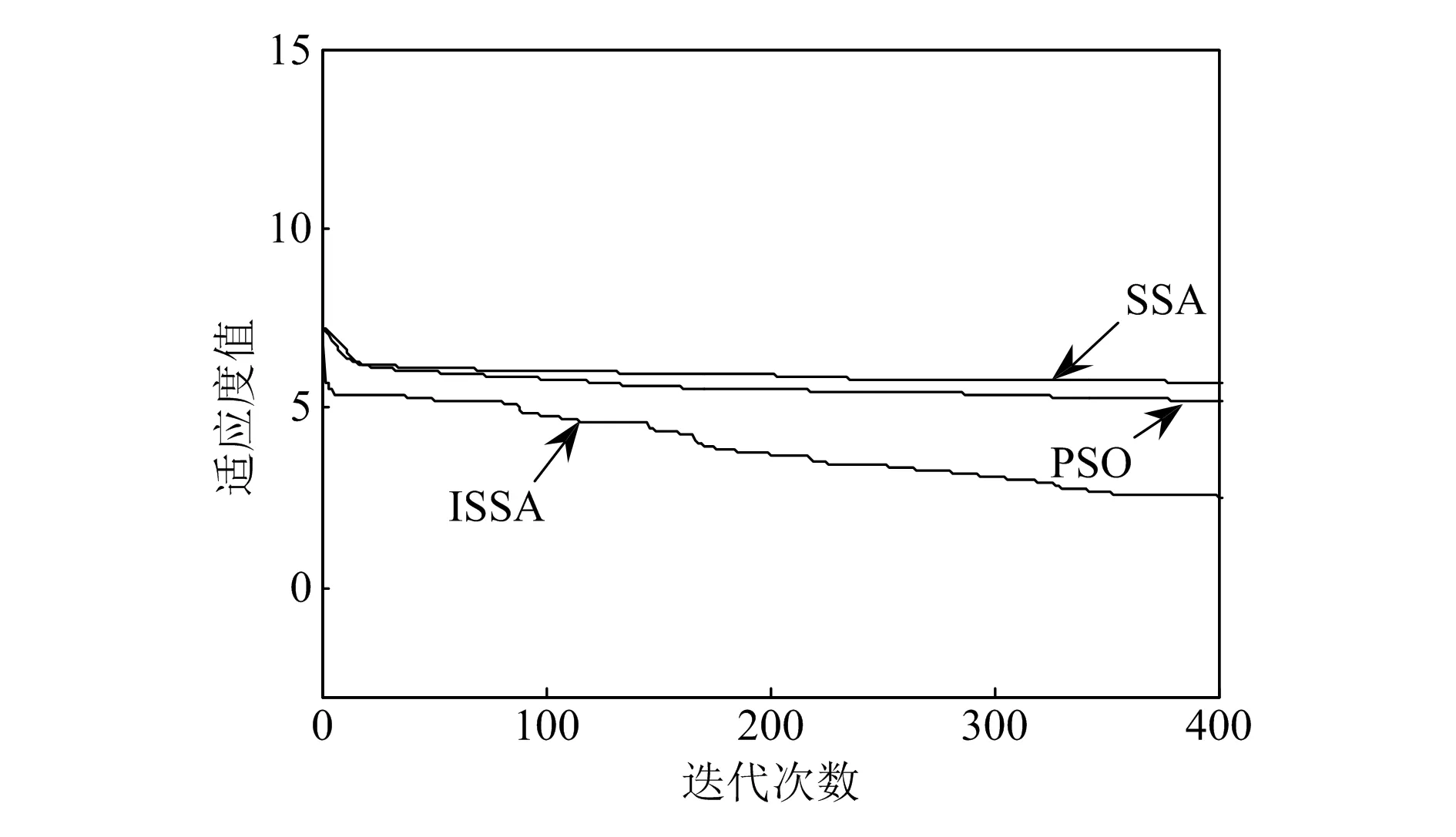
图7 ISSA与SSA、PSO算法优化Canny算子参数函数收敛曲线对比图
从图5可以看出,不同Ostu阈值得到的图像分割效果不同,当阈值在180以下时,很难区分闸瓦和背景设备;当阈值达到180以上时,随着阈值逐渐增大,闸瓦分割图像逐渐清晰,尤其是阈值在230左右时,得到的分割图像较为理想;如果阈值继续增加,分割图像内部模糊点增多,效果会变差。由此可知,合理设置阈值才能够得到清晰的闸瓦分割图像。
从图6可以看出,不同的算子提取的分割图像边缘是不同的,直观上来看,改进Canny算子得到的边缘清晰、连续,优于其他3种算子,而Prewitt算子、Canny算子表现最差,很难得到完整的分割图像边缘。
从图7可以看出,相比于PSO和SSA,ISSA全局收敛性能更优,表明改进的个体更新策略有效保持了种群样本多样性,提高了算法跳出局部最优的能力。
3.2 闸瓦状态监测对比试验

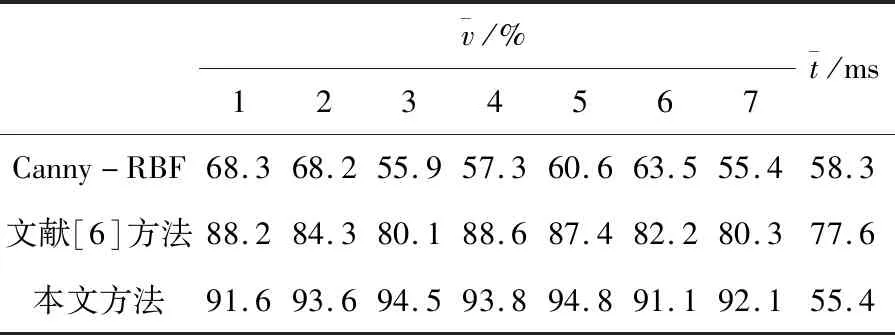
表1 闸瓦状态监测对比结果
从表1可以看出,在监测正确率方面,对于7种闸瓦状态监测问题,本文监测方法的正确率都达到了90%以上,相比于文献[6]提出的方法,监测正确率提高了14.7%~18.0%,而Canny-RBF表现最差,最高的监测正确率也只有68.3%。在运算时间上,3种算法表现相当,都到了毫秒级别,能够满足快速监测要求。
试验结果表明,本文所提监测方法具有更好的监测性能,这是因为采用改进Canny算子提取到的分割图像边缘特征更明显,并且有效降低了数据处理量,很大程度减少了计算时间,即利用ISSA优化后的RBF神经网络进行分类监测,监测结果可信度更高。
4 结束语
本文对铁路机车闸瓦状态高精度自动检测问题进行了研究,提出了一种基于机器视觉的铁路闸瓦状态监测方法,通过设计ISSA对Canny算子进行优化,并建立融合ISSA优化RBF神经网络监测模型,实现了对闸瓦状态的有效监测。试验结果也验证了该方法能够大幅度提高监测精度,具有一定的推广应用价值。
猜你喜欢
现代电子技术(2022年11期)2022-06-14
建材发展导向(2021年19期)2021-12-06
校园英语·上旬(2020年1期)2020-05-09
卷宗(2017年16期)2017-08-30
通信产业报(2016年44期)2017-03-13
国外科技新书评介(2014年12期)2015-01-05
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13
雕塑(1996年4期)1996-07-12
