隧道智能巡检机器人应用研究
2022-10-14 13:51廖俊蓉付建美杨夏里林伟杰叶超欣
科技创新与生产力 2022年9期
张 晖,廖俊蓉,付建美,杨夏里,林伟杰,叶超欣
(南方电网调峰调频发电有限公司,广东 广州 510635)
我国电缆隧道的应用越来越多,逐渐取代架空式线路传输方式,成为城市电网发展的重要方向。电缆隧道巡检多采用传统意义上的人工巡检模式[1],而隧道自身空间比较狭窄,设有诸多挂架且遍布线缆,结构较为复杂,人工巡检主要依靠感官和简单仪器进行,易出现漏检的情况,巡检工作效率较低,加之工作环境较差,存在一些未知的安全隐患。
为了提高城市电缆的现代化管理水平,加大电力隧道的巡检力度,有效减轻巡检工作人员的工作强度,避免电缆隧道安全事故的发生,电缆隧道智能巡检机器人的研究与应用迫在眉睫[2]。代替人工作业的巡检机器人可以大大提高电缆管理的现代化和智能化水平,缓解隧道巡检工作人员的压力,减少隧道维护的安全隐患以及安全事故,并便于精细化和自动化管理,可为电力隧道稳定安全运行提供重要保障。
1 隧道智能巡检机器人研究现状
随着城市化进程的不断加快,智能电网的建设也逐渐普及。电缆隧道的正常使用是城市安全运行的保障,对提高人民生活水平以及加强社会建设具有重要意义。由于隧道处于封闭状态,湿度较大且不通风,一些设备可能会出现发热现象,甚至会有可燃有毒气体排放,所以电缆隧道安全隐患极大,为保证隧道正常运行,对隧道内部设备及隧道内环境进行监测就显得尤为重要[3]。
目前,隧道环境的监测多采用人工巡检方式,由于电缆运行过程中存在一定的风险,极大威胁着隧道工作人员的安全和健康;此外,人工巡检容易遗漏一些异常情况,不能及时发现问题并做出反应,且人力物力消耗极大,安全系数低、有效工作时间长、操作不灵活、缺乏智能化和信息化的手段。为保证隧道的安全正常运行,需及时发现安全隐患并解决,否则一旦出现问题,必将带来极大的经济损失和安全问题。针对人工巡检方式存在的缺陷,迫切需要一种自动化检测手段,实现隧道故障检测及隧道环境实时监测功能,隧道智能巡检机器人应运而生。
在电缆隧道巡检机器人方面,国内有一定的技术积累,但目前相关研究应用还有待提高。吴伟[4]构建了一套高压电缆智能巡检机器人硬件系统并开发了远程监测平台,具有火灾预警和超声波探测等功能,系统运行稳定、功耗低,对高压电缆隧道的自动化巡检有实际意义。孙晓诚[5]借鉴国内外机器人研究成果,设计了一款电缆隧道巡视机器人,基本实现了定位、防撞、移动视频巡检、红外热成像、隧道环境检测等功能需求。魏更[6]搭建了电缆隧道巡检机器人系统硬件平台,设计了基于自适应模糊PID 的运动控制算法,使机器人能够适应隧道内的地形变化,实现了巡检机器人运动控制的智能化。王晓和许慧华[7]根据电缆隧道的环境特点,提出了一种智能机器人自动化巡检的设计,并在实际环境中进行应用,实现了隧道环境自主化、自动化监测的目的,有效缓解了电力部门的工作压力。崔旺[8]协同沈阳电业局,结合电缆隧道的结构特征,研制了一种能够适应电缆隧道环境的巡检机器人,具备越障、爬坡、通信等隧道巡检的基本功能,为隧道机器人的开发提供了一种新的方案。杜益刚[9]完成了一种履带式电缆隧道巡检机器人系统的硬件和软件设计,满足电缆隧道巡检任务的基本要求,促进了电网智能化的建设。
图1 为现场勘探时拍摄的电缆隧道内部环境。由于电缆隧道环境狭窄、运动空间小、障碍物较多,工作人员在场工作时存在严重的安全隐患。智能机器人的应用是隧道巡检智能化、数字化、自动化的有效途径,当前需要对隧道机器人进行深入细致的研究,以满足实际应用的要求。

图1 电缆隧道内部环境
2 隧道智能巡检机器人关键技术点
2.1 隧道智能巡检机器人主要功能
2.1.1 导航定位
定位功能[10-11]是隧道智能巡检机器人的核心功能之一。通过定位技术确定智能机器人在隧道中的具体位置及运动路线,是隧道机器人智能化、现代化运行的关键之处。常见的定位技术有GPS 及北斗卫星定位、射频识别(RFID)定位、基站定位以及ZigBee 定位等。借助不同的传感器,可以获取隧道机器人周围环境的信息,完成机器人的自主导航定位。具体采用哪种定位方式需要结合隧道环境,以及速度、成本、精度等综合考虑。隧道机器人借助自身的导航定位功能,能规划出最佳行程路线,在复杂环境下,可翻越或避开土坑、土堆等障碍物。
2.1.2 图像识别
隧道智能巡检机器人搭载高清摄像头,用于拍摄隧道内的电缆、仪表等设备图像,并对采集到的图像进行智能化处理[12],然后利用图像识别技术自动判断设备的运行状态,若发现问题可及时做出反馈处理。主要识别内容包括表计识别、积水识别以及直线检测等。
1)表计识别。高清相机实时现场采集监测点的表计图像,依托图像处理以及模式识别技术[13],完成不同仪表的自动识别、准确读数。对不同类型的仪表(指针式仪表和数字式仪表)进行分类处理,选择合适的识别算法,实现表计识别的智能化、实用化和工程化,便于巡检机器人现场部署和大规模应用。对指针式仪表的识别可采用一种基于刻度弧线的表计识别方法,主要流程为:图像预处理、特征匹配求单位矩阵、基于刻度弧线读数;对数字式仪表可采用HOG 特征提取和SVM 分类器训练的方法对数字进行识别。
2)积水识别。电缆隧道中如果出现积水,可能会浸泡线缆,导致设备短路。智能巡检机器人通过图像处理技术,可识别隧道中的地面积水情况,对水位信息进行采集,发现异常情况时,及时发出警报,方便管理人员根据实际情况采取有效措施。
3)直线检测。隧道内部环境复杂多变,有些比较狭窄的地方工作人员难以通过,故不能准确判断隧道线缆的情况。应用Hough 直线检测技术判断线缆是否脱垂也是目前需要研究的要点之一。
2.1.3 红外测温
智能巡检机器人配备红外热成像仪[14],可对一些特定的易发热的关键设备,如线路刀闸、电缆线头、开关柜室等进行实时监测,并将监测到的各处设备的温度值输出到监控主机(应用软件界面)显示,如果超过设置的温度数值,便会发送警报信号,提醒工作人员进行设备维护维修,避免安全事故的发生。测温时智能巡检机器人采用定点监测方式,从多个角度全方位地对设备进行清晰成像,以实现精确测温。
2.2 隧道智能巡检机器人的关键研究要点
2.2.1 通信技术
控制站点与隧道巡检机器人通过通信技术[15],进行数据传输、信息交换等。控制站点控制隧道巡检机器人工作时,需要发出相应的控制命令,如导航定位、定点摄像、红外成像等,隧道巡检机器人按照接收到的指令,进行行进、实时拍摄现场图像、红外成像等操作,完成相关数据内容的采集后,将信息传到控制站点,见图2。为了保证控制站点和隧道机器人之间通信顺畅、快捷,要注意避免周围环境对通信模块的干扰。

图2 控制站点与机器人的通信
2.2.2 运动控制
隧道巡检机器人的运行形式是机器人代替工作人员进行自动化巡检的重点内容。隧道内空间比较狭窄,地面有坡度的情况较多,有些地方还可能出现积水,有时甚至需要翻越障碍物,综合考虑隧道内的环境状况,轨道式机器人[16-18]较适合隧道内的自动巡检。轨道式机器人行动路径相对固定,能有效解决复杂地面导致的问题,相较于其他运动方式来说具有一定的优势,可保证机器人正常行进,安全可靠地工作。
2.2.3 直线检测技术
为减少隧道巡检时人力、物力的消耗,可通过图像处理和模式识别技术来判别线缆的状态。首先通过隧道巡检机器人采集隧道线缆图片,然后对图像进行灰度化、二值化、均值滤波等预处理,之后采取边缘检测提取边缘轮廓,最后运用Hough 直线检测,判断线缆的状态。具体流程见图3,相关测试结果见图4。
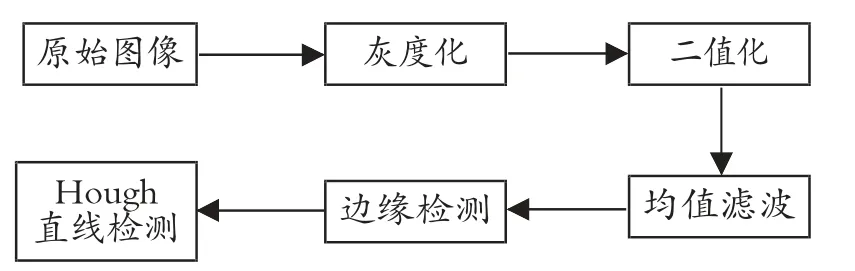
图3 直线检测流程
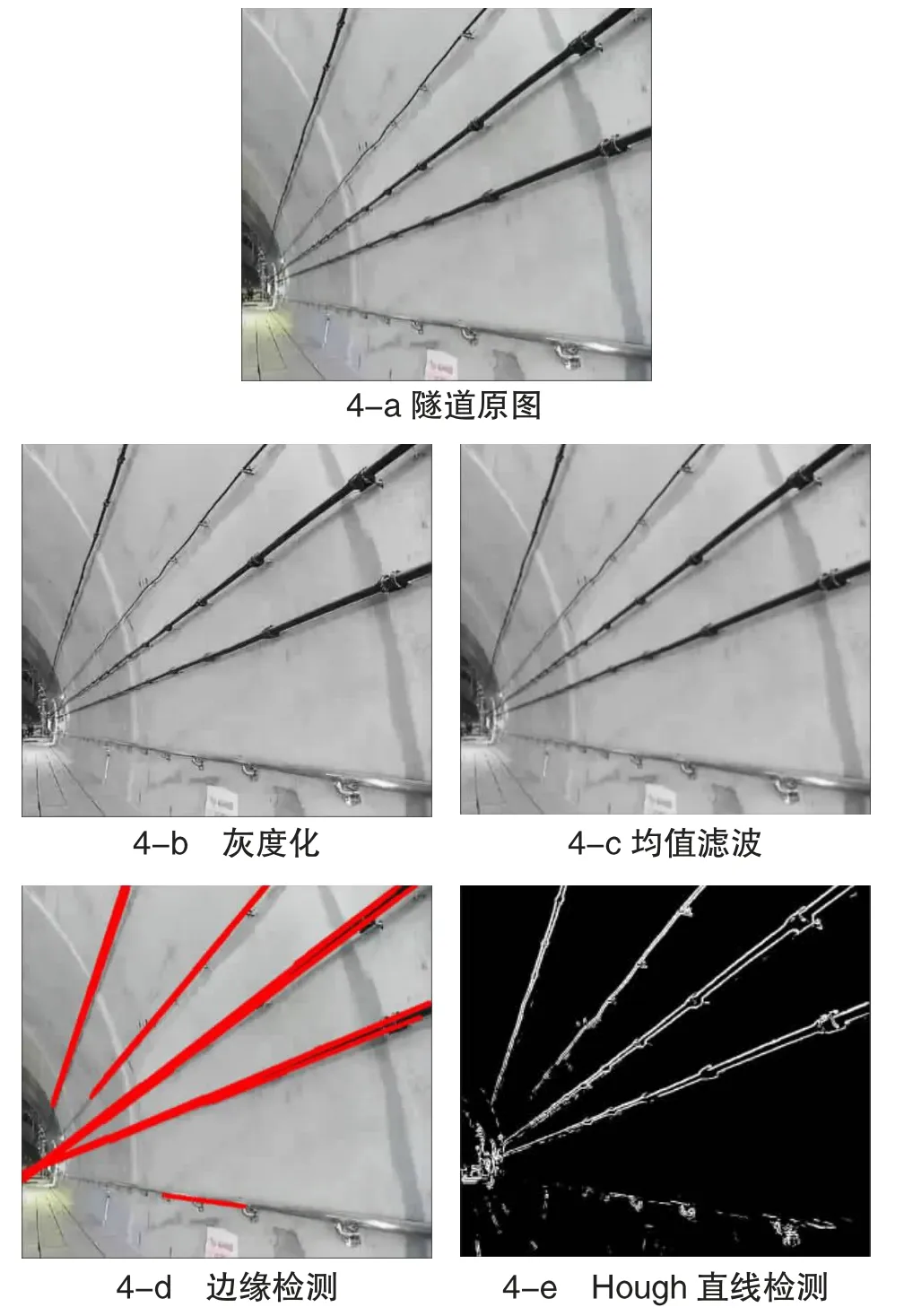
图4 测试结果
3 结束语
开发隧道巡检机器人,实现隧道监测过程的自动化,一直是电缆隧道监测自动化的研究热点。随着技术的发展,机器人可搭载的传感器种类也将逐步增加,控制会更为精确、迅速,在电缆隧道内的应用场景也会更加广泛。在隧道内部复杂工作环境下,如何实现对隧道巡检机器人精确、高效与稳定的控制是需要进一步研究的重点。
猜你喜欢
中国核电(2022年3期)2022-09-17
云南画报(2021年9期)2021-12-02
学苑创造·C版(2020年6期)2020-07-18
中阿科技论坛(中英阿文)(2020年1期)2020-04-20
初中生世界·九年级(2019年6期)2019-08-15
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
作文·初中版(2017年11期)2017-09-14
小天使·四年级语数英综合(2016年11期)2016-11-29
科技创新导报(2016年7期)2016-05-14