相邻T型路口非直线路径绿波控制方法研究
2022-10-09 00:42林皓博肖宇舟
重庆交通大学学报(自然科学版) 2022年9期
赵 欣,酆 磊,林皓博,陈 曦,肖宇舟
(1. 武汉理工大学 交通与物流工程学院,湖北 武汉 430063; 2. 桂林电子科技大学 建筑与交通工程学院,广西 桂林 541004;3. 智能交通系统广西高校重点实验室,广西 桂林 541004)
0 引 言
绿波协调控制是城市交通管理的重要手段。在J.T.MORGAN等[1]首次提出绿波的概念后,学者对绿波协调控制做了大量研究,提出了MAXBAND[2]和MULTIBAND[3]两个绿波协调控制领域经典的模型。近些年来,学者在这两个模型的基础上,针对不同交通特点和应用场景进行优化研究。陈宁宁等[4]考虑动态红灯车辆排队消散时间,对MAXBAND模型进行优化;荆彬彬等[5]根据干线路口公共周期不同,提出一种适用双周期的干线绿波信号控制模型;常玉林等[6]考虑相交道路左转饱和交通量,对MULTIBAND模型进行了改进;荣彧[7]考虑右转汇入车辆影响,提出了一种基于干扰的干道绿波协调控制模型;曲大义等[8]基于交通波理论,提出了精准计算干线相位差的绿波协调控制模型。上述文献研究对象与文献[9-12]中相似,均是在经典绿波控制模型的基础上,在不同交通情景下的优化问题,且对象都是城市干道且均为直线。笔者在信号控制优化实践中常发现,在实际城市道路网中,由于过江过海通道、新老城区连接通道等单一通道交通强吸引的缘故,主要交通流向不仅只存在在某条干道上,也可能存在在路网的路径中,且不一定是直线路径。
城市道路交通中,沿江沿海干线道路交叉口多以T型路口为主,且T型路口一般出现在道路路端尽头[13]。T型路口的绿波协调控制与传统的干线协调控制不同,其路口的协调相位并非直行,存在右转可能性,这样存在单个协调相位不受信号控制约束的情况,对绿波控制模型的等式约束带来建模障碍。现有干线绿波协调控制模型约束条件中均存在等式约束,该等式约束由应协调路口受信号控制的上、下行交通流所确定,而一个路口单向协调车流所确定的时间参数并不能构成等式约束,这与传统协调控制模型显著不同。
综上,现有绿波协调控制研究的控制对象为城市中某干道,其控制路径为直线。因此,有必要提出一种基于路径的绿波协调控制方法,以实现路网中某一路径的绿波协调控制。笔者基于MULTIBAND模型,考虑路径类型和车流汇入的干扰,提出一种面向T型路口的非直线路径绿波控制方法。
1 相邻T型路口车流路径分析与建模
1.1 问题描述
城市某路网如图1(a),路口a1、b1、c1、d1为协调控制路口,路径如图中折线表示。不考虑右转受信号控制,上、下行车流需经过三次信号灯,上行车流由西向东经过受信号控制路口a1、c1、d1,下行车流由东向西经过受信号控制路口d1、b1、a1,上、下行车流的协调相位均存在一次左转和两次直行。
由于吸引点的交通特征,T型路口非协调进口方向流量一般也较大,如图1(b)中路口c2的北进口方向,直行车流汇入绿波控制路径后将会影响控制效果,大量的排队车辆堆积将增加下游路口的排队消散时间,如图2(图中C为相邻路口公共信号周期时长),从而影响高峰时期绿波控制效果;当然也存在如图1(c)中b3、c3路口的情形,其汇入绿波控制路径的车流为右转车流,右转车流不受信号控制,可不停车通过路口。
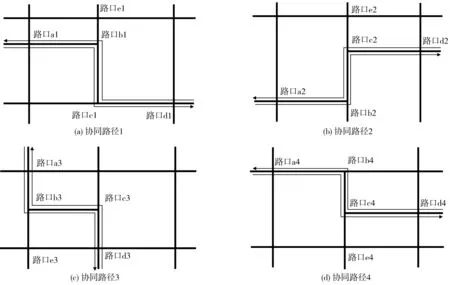
图1 相邻T型路口协调示意

图2 干扰相位汇入被控路径后影响示意
当绿波控制路径不为直线时,在路径转向路口其对应的协调相位仅有单个左转相位。若要实现该非直线路径的绿波协调控制,如何求解处理单个左转相位的相位差成为关键。经典的MAXBAND模型、MULTIBAND模型等都是基于NEMA双环信号相位结构构建的求解模型而非直线路径,绿波协调在转向路口协调相位仅有一个,因此在协调模型中必然出现单环信号,现有模型无法解决单环信号与双环信号之间的协调问题,因此需对基本模型改进扩展以适用于非直线路径的绿波控制。
1.2 相邻T型路口车流路径建模


表1 协调路径参数及其含义
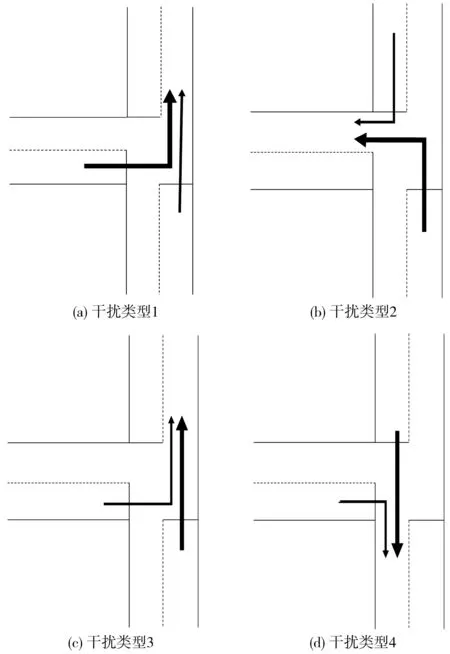
图3 协调相位干扰类型示意
(1)
(2)
(3)
(4)

若考虑上、下行方向差异,对应路径有8种,将上述4种路径上、下行方向对调即可得到其余4种路径。比较矩阵可知,由于路网结构的不同,相邻T型路口的绿波控制路径中干扰相位所处的路口和数量都不同。通过矩阵可以直观得到被控路径转向、干扰相位和路口间距,当路网和被控路径愈加复杂,其对应矩阵数量愈多。
2 面向相邻T型路口的非直线路径绿波控制模型
2.1 条件假定和参数定义
模型对应路径为图1(b),不考虑行人和非机动车的影响,路口信号方案均采用美国NEMA双环相位结构[14],且协调相位置于非协调相位后,模型中参数以及对应含义如表2。
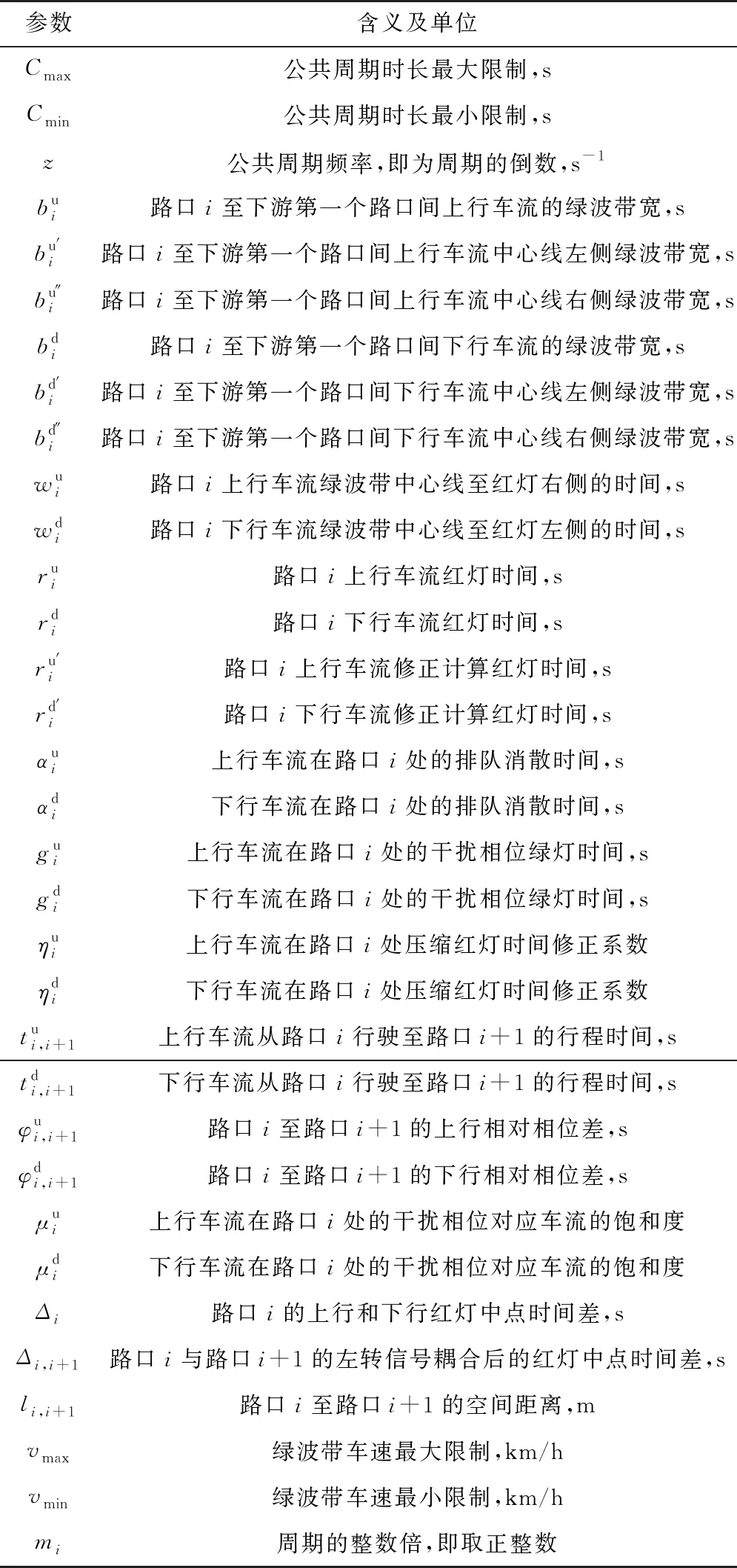
表2 相邻T型路口非直线路径绿波控制模型参数
2.2 相邻T型路口的非直线路径绿波控制模型

图4 相邻T型路口非直线路径绿波协调时距示意
(5)

(6)
(7)
(8)
(9)
(10)

(11)
(12)

(13)
(14)

(15)
(16)
(17)
(18)
式中:γ为上行、下行绿波需求比例,根据γ的大小分配绿波带宽,可使得需求较大的方向获得更大的绿波带宽。
2.3 模型求解
式(5)~(18)所述模型中,参数均归一化之后,其为混合整数线性规划模型。现主流求解整数线性规划模型的方法以程序求解为主,包括MATLAB、LINGO等。但由于绿波协调模型中,其同类型的约束过多、参数重复出现,MATLAB编程过程过于繁琐,且容易出错。LINGO在此方面表现优异,可大大减少编程任务,并在结果输出和分析多样化。因此,选用LINGO求解完全可以胜任。
2.4 模型确定流程
由于路径不同其对应的协调控制模型不尽相同,但其模型框架是一致的。面向T型路口的非直线路径绿波控制模型的选择流程如图5。
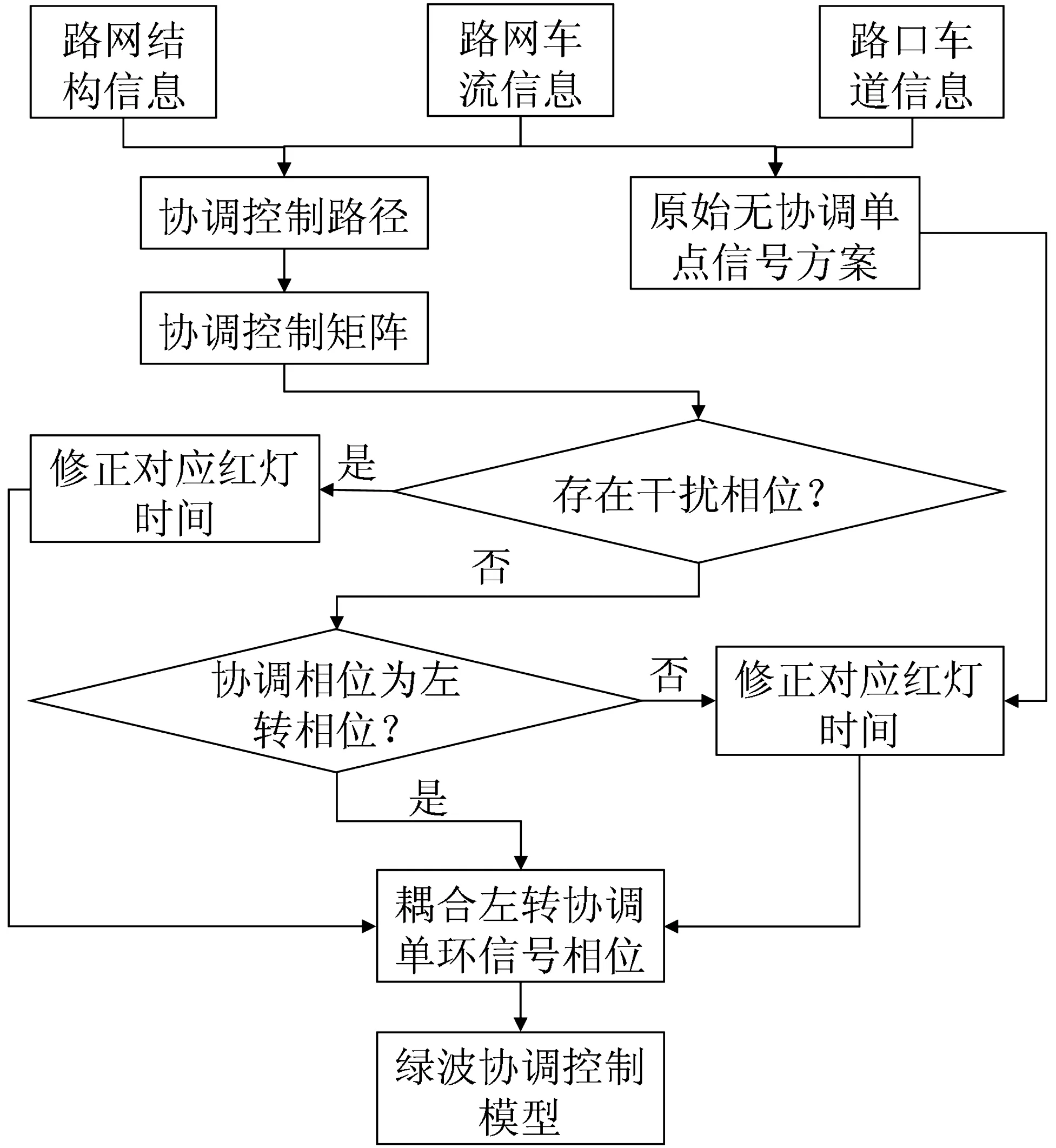
图5 绿波协调模型选择流程
3 实例分析
3.1 试验设计

图6的路径对应的路口间距和相位长度如表3、各路口原始采集流量数据如表4(路口名称以首字母代表,例如:CSL表示穿山路),以S1为关键路口,表中“/”表示右转相位不受信号控制。
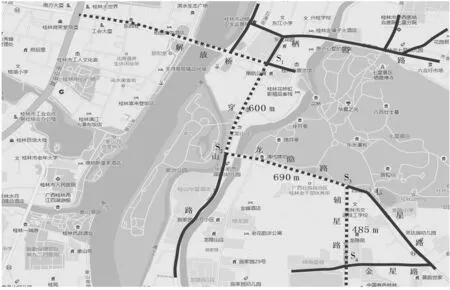
图6 路网路径示意
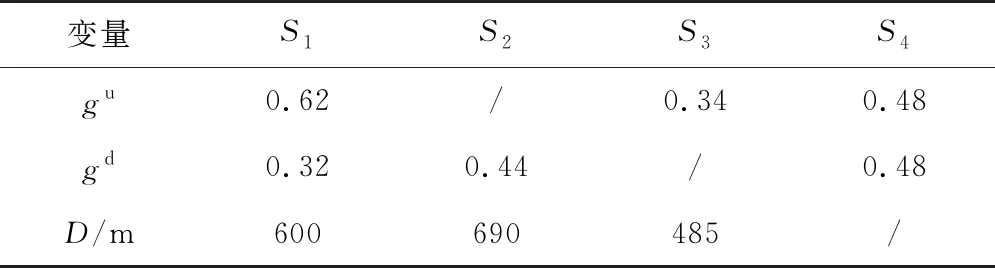
表3 各路口间距和相位长度

表4 各路口原始采集流量数据
考虑到干扰相位的流量较大,试验设置所有干扰相位的饱和度μ=0.50,红灯时间修正系数η=0.98、带宽需求修正因子k=0.99。模型其他需标定的与时间相关的参数如表5,根据历史交通数据标定即可。待所有参数标定后,通过软件LINGO求解计算未知量,最后得到协调控制相位差,如表6。其中,路口CSL&ZYL、路口FXL&JXL以北向南直行为参照相位,路口CSL&LYL以北向东左转为参照相位,路口LYL&FXL以南向西左转为参照相位。

表5 其他时间参数标定值
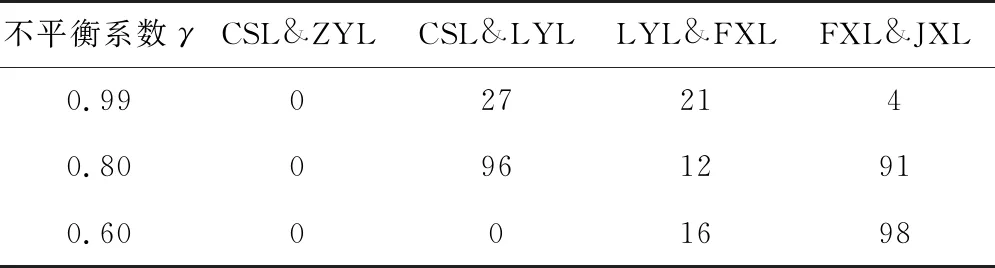
表6 不同交通流状态下LINGO求解相位差
3.2 仿真结果与分析
将LINGO求解结果输入到VISSIM中进行仿真试验,在三种不同交通情景下各仿真时长为 3 600s。统计行程延误和停车延误情况,比较采用经典绿波控制方法(优化前)、笔者提出的控制方法(优化后)的协调控制系统和被控制路径的延误情况。仿真试验中,经典绿波控制是以转向路口为节点,分成若干段直线路径后实施绿波控制。被控制路径在三种交通流状态下优化前后的行程延误和停车延误情况,如图7。
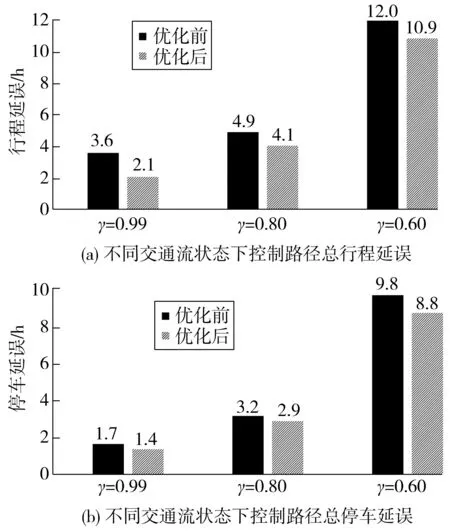
图7 被控路径优化前后延误情况比较
仿真结果验证了笔者方法在不同的交通流状态下被控制路径均有显著的优化效果,其平均行程延误分别降低了22.27%、14.64%、13.72%,平均停车延误分别降低了26.09%、17.19%、15.81%,具体如表7。

表7 各评价指标在不同交通流状态下的优化效果
横向比较可以发现,笔者方法方法随着双向交通量的不平衡,其延误呈增加趋势,但仍有显著优化效果,其延误增加的原因在于潮汐流导致带宽需求不平衡,使得交通量较大的一侧的延误增加;随着双向交通流不平衡程度增加,比较发现其优化效果有所降低,这也是该模型需要克服的难点。优化被控制路径的同时也需要兼顾非控制方向的车流延误,优化模型的最终目标为系统最优,因此,仿真试验也统计了优化前后整个协调系统的延误情况,如图8。

图8 协调系统优化前后延误情况比较
通过比较发现,协调系统在该控制方法的三种交通流状态下均有不同程度的优化效果,其平均延误分别降低了8.04%、3.16%、5.77%。可知在优化被控制路径的同时并没有增加协调系统的延误,并且得到了一定程度的优化。该方法在考虑干扰相位采取的控制策略是压缩非协调方向的绿灯时间,这必然导致非协调方向的延误会有所增加,但这是在可接受范围之内的。这说明了该控制方法可在优化系统的前提下,使得被控制路径得到显著的优化效果,进一步证明了该控制方法的优越性。
4 结 语
该方法针对T型路口的非直线路径绿波控制,考虑路径转向类型以及干扰相位数量,以MULTIBAND模型为基础进行模型改进扩充,并对不同路径转向类型进行建模。求解和仿真的结果说明:笔者提出的控制方法能够显著降低被控路径的行程延误和停车延误。具体来说,被控制路径在三种交通流状态下行程延误分别减少了22.3%、14.6%、13.7%,停车延误分别减少了26.1%、17.2%、15.8%。不仅降低了被控制路径的延误和停车次数,同时也降低了整体协调系统的延误和停车次数,提高了被控制路径的控制效果,可改善城市路网中交通主要流向对应路径的通行效率。但模型仅限于T型路口的非直线路径,下一步工作需要考虑将十字路口作为转向路口,将模型的适用条件进一步扩展,使其能够适应复杂城市道路网络的路径建模和控制,为城市道路网区域协调控制提供新方向。
猜你喜欢
东坡赤壁诗词(2019年5期)2019-11-14
东坡赤壁诗词(2019年3期)2019-07-05
珠江水运(2016年23期)2017-01-04
科学与财富(2016年29期)2016-12-27
现代商贸工业(2016年22期)2016-12-27
科技创新导报(2016年20期)2016-12-14
考试周刊(2016年62期)2016-08-15
中国信息化·学术版(2013年4期)2014-01-03
中学生百科·小文艺(2009年8期)2009-11-24
现代电子技术(2009年15期)2009-09-30