
基于事件触发的永磁同步电机多步模型预测转矩控制*
2022-09-29 09:08李耀华苏锦仕吴庭旭张鑫泉崔康柬徐志雄兰奋龙
电机与控制应用 2022年9期
李耀华, 苏锦仕, 吴庭旭, 张鑫泉, 崔康柬, 陈 昕, 徐志雄, 兰奋龙
(长安大学 汽车学院,陕西 西安 710064)
0 引 言
永磁同步电机(PMSM)有限控制集模型预测转矩控制(FCS-MPTC)遍历逆变器所有可用的开关状态,将其代入至磁链和转矩预测模型,计算得到未来时刻的磁链和转矩值,设计体现控制性能的成本函数,通过输出令成本函数最小的电压矢量,实现MPTC[1-5]。与直接转矩控制相比,MPTC通过成本函数定量评价选出控制性能最优的电压矢量,且容易实现多目标控制和非线性约束,但其存在计算量大,实时性差的问题[6]。对于多步预测,随着预测步长增加,需要遍历代入的电压矢量序列呈指数级增长,使得多步MPTC的实时性问题更加严重[7-8]。
为了提高多步预测的实时性,文献[9]建立了转矩和磁链解耦的简化多步MPC,使用查表法和加法运算进行多步预测,与含有平方根和三角函数的传统MPC相比,运算量减小。文献[10-11]提出一种两步预测的简化算法,在单个控制周期内仅考虑最优和次优开关状态,确保在2个控制周期内所选开关状态最优。文献[12]将预测时域分成2部分,对距离当前时刻较近的部分,使用较小的采样时间进行采样,对距离当前时刻较远的部分采用较大的采样时间进行采样。文献[13]通过确定参考电压所在的扇区,用扇区边界的2个电压矢量和零电压矢量组成控制集,将7个备选电压矢量精简至3个,减小需遍历的电压矢量序列个数,但其舍弃部分电压矢量序列,求得的最优解可能不是全局最优解。
本文将事件触发机制引入至PMSM多步MPTC,预先设定触发事件,在每个采样时刻判断预定事件是否触发,以决定相应的采样周期是从最近序列中选择最优控制量,还是进行多步预测并选择最优控制量,通过部分牺牲模型预测的滚动优化特性来有效减小系统运算量,并仿真验证基于事件触发机制的PMSM MPTC可行性。
1 PMSM多步MPTC
x-y坐标系下,表贴式PMSMk时刻定子磁链矢量为ψs(k),施加电压矢量Us(k)后,k+1时刻定子磁链矢量为ψs(k+1)如图1所示。
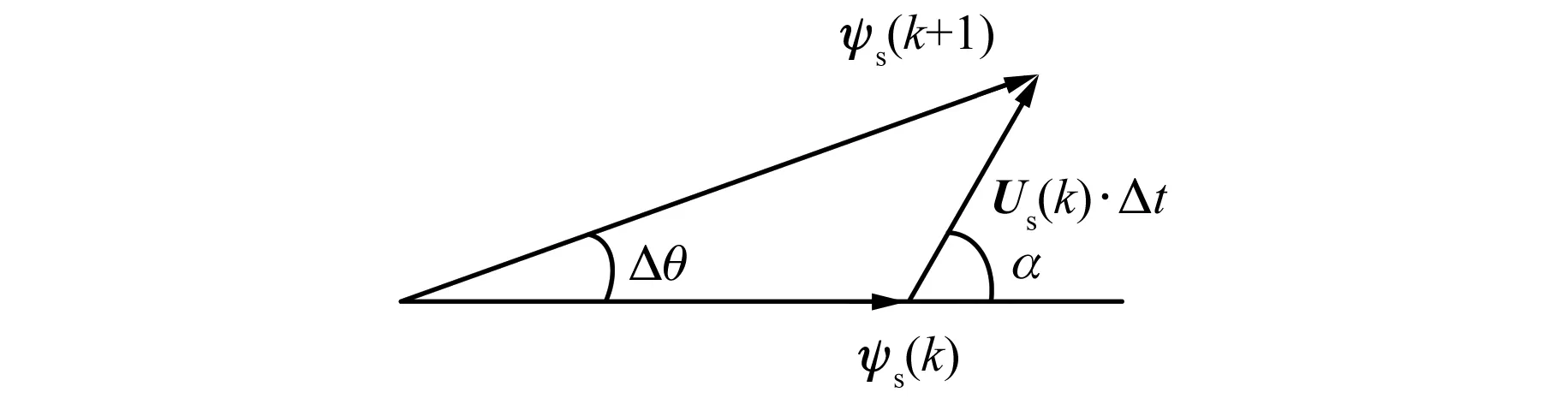
图1 k+1时刻定子磁链矢量
由此可得N步预测中,PMSM第i步的定子磁链幅值、定子磁链角度、转矩角和转矩的预测计算表达式分别如下[14-15]:

(1)

N步预测的成本函数如下:
(5)
由于系统采样频率较高,可近似将k时刻参考值作为k+i时刻参考值,即:

(6)
PMSM多步MPTC系统由式(1)~式(4)可计算得到施加电压矢量序列每一步的成本函数,由式(5)可求出施加电压矢量序列对应的成本函数,选择令成本函数最小的电压矢量序列作为最优序列,并将最优序列的第一个电压矢量作用于电机系统,下一时刻重新进行多步预测。以两电平三相逆变器为例,其可产生7个基本电压矢量,则N步MPTC需遍历代入的电压矢量序列数目为7N。因此,随着步长的增大,多步预测的计算量将急剧增大。
2 基于事件触发的多步预测
为了减少多步预测的运算量,将事件触发机制引入至多步MPTC系统。预先设定反映转矩和定子磁链误差的事件和相应阈值,在连续的采样周期内,如果预定事件得到触发时,则相应的采样周期内不进行多步预测计算,而是从最近的一次多步预测计算得到的最优控制序列中选择对应的电压矢量。
以五步预测为例,假设在k时刻进行五步预测计算,则得到如图2所示的最优控制序列,即为最近控制序列,其中含有5个电压矢量,第1个控制量U2作用于逆变器。在k+1时刻,判断是否满足事件触发条件,如果满足触发条件,则直接将最近控制序列的第2个电压矢量U4作为最优控制量直接作用于逆变器,无需多步预测。如果不满足,则进行多步预测。以此类推,如果事件连续触发,在k+5时刻,由于最近控制序列的所有电压矢量均已被使用,则第k+5采样时刻需要进行多步预测计算,重新更新控制序列。

图2 事件触发机制示例图
为了体现控制性能,将磁链误差和转矩误差设置为触发事件。将转矩误差绝对值<设定的阈值记为事件ET,将磁链误差绝对值<设定的阈值记为事件Eψ,分别如下所示:

(7)

(8)

当采样时刻转矩误差满足式(7)时,ET取值为1,否则ET取值为0。当采样时刻磁链误差满足式(8)时,Eψ取值为1,否则Eψ取值为0。
受最优控制序列的控制变量个数限制,连续触发次数应小于N-1,即当最近控制序列的所有电压矢量均已被使用,此时必须进行多步预测。将连续触发次数P与预测步数N的关系记为事件EP:
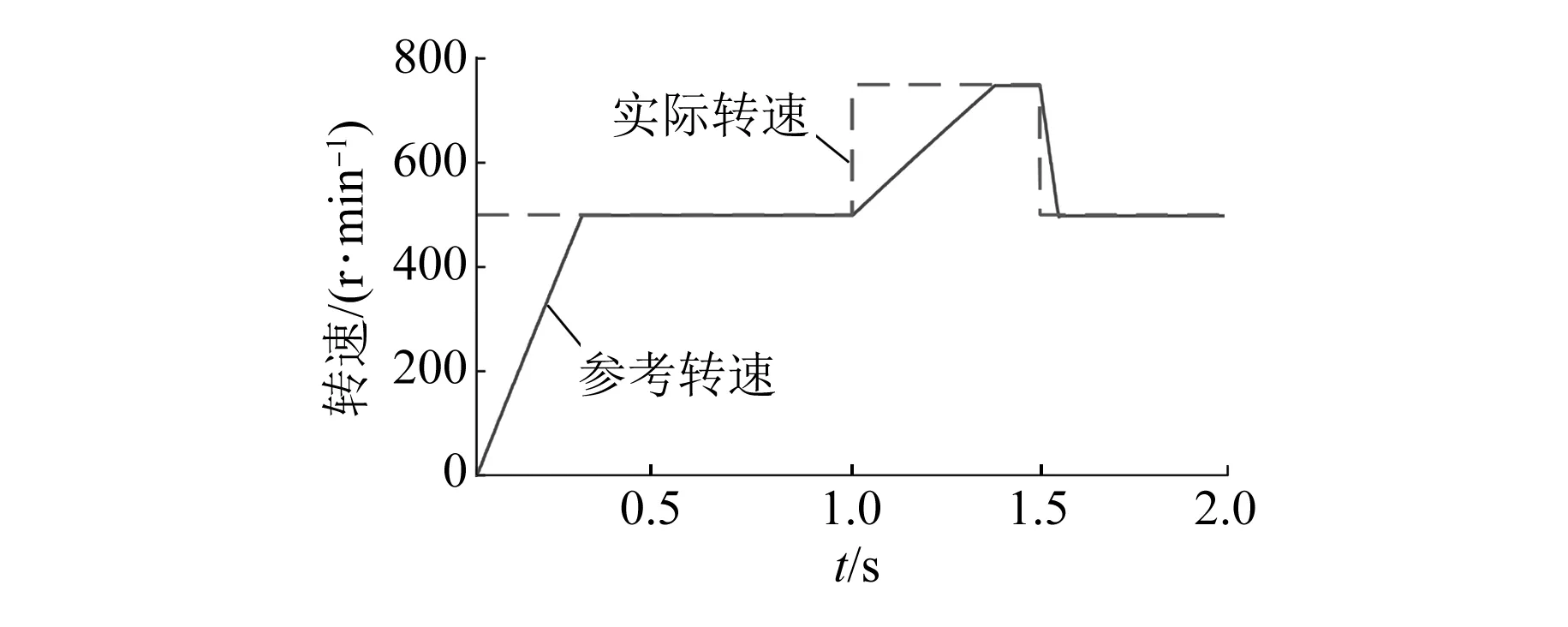
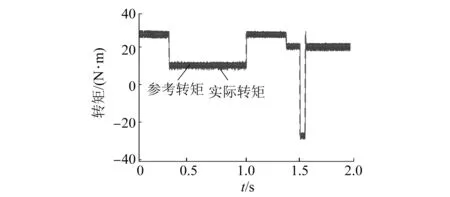
EP:P (9) k+1时刻,连续触发次数P初始值为0,如果事件触发,则P+1。以此类推,当k+N-1时刻,事件依然触发,则P=N-1。当k+N时刻,则不满足式(9),事件不触发,需要在当前采样周期重新进步多步预测计算。 事件触发机制由ET、Eψ和EP3个基本事件组成,触发机制逻辑表达式如下: E=ET∧Eψ∧EP (10) 当触发机制的输出值E为1(True)时,表示事件触发机制被触发,对应的采样周期无需进行多步预测计算,直接从最近控制序列中选择对应的最优控制量。当触发机制的输出值E为0(False)时,表示未达到触发条件,继续进行N步模型预测,更新最优控制序列,控制流程图如图3所示。 图3 事件触发机制流程图 基于MATLAB/Simulink建立表贴式PMSM传统MPTC和事件触发机制的MPTC的仿真模型。仿真用表贴式PMSM参数如表1所示。 表1 仿真用表贴式PMSM参数 仿真时长2 s,采样周期Ts为50 μs。直流母线电压Udc为312 V。初始参考转速为500 r/min,1 s时阶跃至750 r/min,1.5 s时阶跃至500 r/min。初始负载转矩10 N·m,1 s时阶跃至20 N·m。参考定子磁链幅值0.3 Wb。转速环PI参数KP=10,KI=5×10-5。转矩误差绝对值事件触发阈值为0.8 N·m,定子磁链幅值误差绝对值事件触发阈值为0.008 Wb。 以预测步数N=5为例,传统MPTC和采用事件触发机制MPTC仿真波形如图4~图9所示。 图4 传统MPTC电机转速 图5 传统MPTC电机转矩 图6 传统MPTC定子磁链幅值 图7 事件触发机制的MPTC电机转速 图8 事件触发机制的MPTC电机转矩 图9 事件触发机制的MPTC定子磁链幅值 采用转矩脉动均方根误差(RMSE)、磁链脉动RMSE、系统平均开关频率对电机控制效果进行评价: (11) (12) (13) 当预测步数N=5,传统MPTC和采用事件触发机制的MPTC控制性能如表2所示。 表2 不同策略下的MPTC控制性能 当转矩和磁链误差较小时,采用事件触发机制MPTC直接从之前采样周期得到的多步电压矢量序列中选择对应的电压矢量,牺牲了MPC滚动优化的特性,控制性能受到影响。由仿真结果可知,采用事件触发机制的MPTC转矩和磁链脉动均有所增大,但幅度较小,且平均开关频率有所降低。 对于多步预测,每一步均需采用式(1)~式(4)所示的预测模型进行预测计算。每使用一次预测模型代表一次预测计算。对于传统MPTC,每个采样周期的预测计算次数固定,对于采用事件触发机制的MPTC,预测计算次数并不固定。因此,统计仿真时长内每个采样周期的预测计算次数,并求和除以总采样周期,可得平均预测计算次数。 对于五步预测,传统MPTC的每个采样周期的预测计算次数为7+72+73+74+75=19 607次。经统计,采用事件触发机制的MPTCET、Eψ和EP同时触发的采样周期共有20 991个,此时无需多步预测,直接使用最近序列对应的电压矢量,预测计算为0次。因此,采用事件触发机制的五步MPTC的平均预测计算次数为9 317.99次,运算量减小至传统MPTC的47.52%,说明事件触发机制可有效降低系统运算量。 本文以转矩误差、磁链误差和连续触发次数作为基本触发事件,建立基于事件触发的PMSM多步MPTC系统。当满足事件触发条件时,相应的采样周期无需进行多步预测计算,而是从已有的控制序列中选择对应的电压矢量,以减小运算量。仿真结果表明,采用事件触发机制的MPTC可行,由于其牺牲了MPC滚动优化的特性,转矩和磁链脉动均有轻微增大,但开关频率和平均运算量得到有效降低。
3 仿真验证









4 结 语
猜你喜欢
时代汽车(2022年19期)2022-10-18
导航定位学报(2022年4期)2022-08-15
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
科学家(2022年3期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
电机与控制学报(2018年9期)2018-05-14
