
永磁直线电机驱动单连杆柔性臂系统的试验模型辨识*
2022-09-29 09:18:54黄旭升颜建虎应展烽
电机与控制应用 2022年9期
黄旭升, 颜建虎, 应展烽
(1.南京理工大学 自动化学院,江苏 南京 210094;2.南京理工大学 能源与动力工程学院,江苏 南京 210094)
0 引 言
随着工业生产、航天航空、医疗手术、救灾探测、生活护理等领域对高性能与高适应性运动控制需求的提升,具有高柔顺性、复杂环境适应性、高运行效率的柔性机械臂刚柔耦合动力系统受到国内外研究机构的广泛关注。目前,该系统通常采用旋转电机作为驱动电机,或采用滚珠丝杠等传动装置实现直线运动[1]。然而随着永磁电机技术的发展和突破,在直线运动场合,永磁直线电机(PMLM)已逐步替代传统永磁旋转电机。与传统的永磁旋转电机相比,PMLM具有高推力密度和高效率,且无需滚珠丝杠等中间传动装置,可以有效提升控制精度和响应时间[2-4]。因此,基于PMLM的柔性机械臂伺服驱动系统具有较好的应用前景。然而,柔性机械臂具有阻尼小的结构特点,导致其在PMLM上做直线运动时极易产生形变和较大振幅的弹性振动,尤其是在做点到点运动时,运动停止后振动仍会持续一段时间,从而影响了末端的迅速精准定位和驱动的操作效率,还会使柔性臂产生疲劳损伤,影响整个系统的操作精度和使用寿命[5-6]。因此,对平动柔性臂系统的驱动和振动抑制研究成为当前的研究热点。
柔性机械臂驱动的实质是系统刚体大位移和弹性小变形之间的非线性耦合叠加,具有刚柔耦合特性。由于理论建模法中往往含有一些假设和简化条件,基于系统实际输入输出数据的试验辨识建模法更容易描述系统的动力学行为,因此从试验模型辨识的角度研究柔性臂运动过程中的动力学特性是实现柔性臂驱动系统高精度平稳运行和振动抑制的基础。
目前柔性臂系统的模型辨识可分为2类场景。第一类场景是柔性臂相对于大地处于静止状态,属于静止的悬臂梁,只有弹性振动,没有刚体运动。Jalil等[7]对有限微分模型进行施加载荷并记录输出的仿真试验,并运用人工神经网络进行系统辨识。娄军强等[8-10]分别采用对压电制动器注入控制电压信号引起柔性臂振动的方法对柔性臂系统做系统辨识,建立输入控制电压和柔性臂振动传感器振动信号之间的传递函数,并用压电制动器做主动抑振控制。然而,压电控制系统的加入意味着在电机控制系统的基础上附加了另一套控制系统,增加了整个柔性臂系统的控制成本,不仅控制系统复杂,还会带来控制溢出甚至控制系统不稳定等风险。因此,设计简单、可靠的控制算法,仅利用电机的合理驱动方法来实现柔性臂的平稳控制及振动抑制很有必要。第二类场景是柔性臂相对于大地处于运动状态,属于运动的悬臂梁,刚体运动和弹性振动同时存在且相互耦合。贾振等[11]对单连杆柔性机械臂做等效到末端的集中质量法建立的小变形动力学方程,建立旋转直流电机驱动器的输入控制电压和柔性臂根部的应变片输出振动信号电压的传递函数,使用电机对旋转柔性臂系统进行模型辨识。王林源[12]将驱动电压输入给直线电机驱动器制造电机推力,得到柔性梁上应变传感器的振动信号输出,运用最小二乘法对已建立的系统动力学方程进行辨识。该直线电机柔性臂系统平台还增加了磁流可控阻尼器抑制柔性臂振动,与上述提到的压电制动器一样属于附加的控制系统。在建立其动力学方程时需要考虑该阻尼器对系统的影响,从而导致系统模型复杂。Yatim等[13-15]分别对旋转柔性臂系统的偏微分方程离散化,对带额外输入的自回归系统(ARX)模型输入Bang-Bang力矩后得到的输出结果与理论模型的前三阶频率作比较,比较分析了传统最小二乘法、遗传算法、粒子群算法和带搜索器的粒子群算法在模型辨识上的优劣。Hizarci等[16]通过对旋转直流电机驱动器的输入控制电压和柔性臂弯曲传感器振动信号进行系统传递函数辨识。文献[17-18]用通用运动和自动化控制器(UMAC)驱动带单连杆柔性臂的直线电机系统,输入扫频位移控制信号,得到用于测量柔性臂位移的激光雷达和相机的输出信号与理论模型仿真结果有较好的吻合度。然而,该集成系统成本很高,而且激光测距设备和摄像头在有些场合安装测量不方便,如没有足够的视角则无法完整观察柔性臂的整个运动范围,而且出现遮挡或高湿度环境还会造成无法获取振动信号等严重问题。因此,低成本高可靠性的粘贴式振动传感器如压电片、应变片等适合电机驱动柔性臂运动和振动抑制的场合。
针对上述问题,本文基于PMLM的伺服控制系统,推导动子位移和应变传感器振动信号之间的传递函数,利用给定位置指令做阶跃输入和扫频激励输入辨识得到等效模型,将同样的位置指令输入等效模型得到的仿真结果和试验结果作比较,验证该系统辨识方法的有效性。
1 PMLM伺服驱动模型
1.1 PMLM的数学模型
理想情况下,PMLM的电磁推力为

(1)
式中:τ为极距;λPM为永磁励磁磁链;Ld、Lq为d-q轴电感;id、iq为d-q轴电流。
本文选用的电机为表贴式PMLM,因此Ld=Lq,即:

(2)
式中:Kf为推力系数。
PMLM运动方程为

(3)
式中:M为动子及所带柔性臂前端装配部分的总质量;y(t)为动子位移;B为黏滞摩擦系数;Ffriction为摩擦力;Fripple为推力波动;Fd为负载扰动主要包括系统模型不确定性、电机动子质量变化及测量扰动等非线性因素引起的随机扰动。
直线电机动子位置y(t)和电磁推力Fe之间的传递函数为

(4)
1.2 PMLM的控制器设计
为了获得PMLM高性能伺服控制,通常采用三闭环矢量控制方法对PMLM进行解耦控制。图1给出了典型的PMLM三闭环矢量伺服控制框图。其中外环为位置环,中环为速度环,内环为电流环,三环均采用经典的PID控制方案。

图1 PMLM伺服控制系统
作为一个伺服控制系统,其输入位置指令和磁栅编码器位置输出之间存在着一个等效传递函数,可以将其结合后面的柔性臂系统传递函数,通过系统辨识的方法得到等效模型。
2 柔性机械臂系统动力学模型
图2(a)给出了基于PMLM的平动柔性机械臂系统示意图。其中PMLM为动初级结构,即定子为永磁次级,动子为电枢初级。其刚柔耦合动力等效物理模型如图2(b)所示,整个系统处于固定全局坐标系XOY中,动子及柔性臂沿Y方向做直线运动,柔性臂通过装置固定在PMLM动子上,其根部关联随动坐标系xoy,y与Y重合;m为末端负载质量;w(l,t)为柔性臂末端在随动坐标系下的挠度;p(l,t)为末端在全局坐标系下的位移,即有p(l,t) =y(t)+w(l,t);柔性臂的体密度、弹性模量、厚度、高度、长度和截面惯性矩分别用ρ、E、b、h、l、I表示。

图2 平动柔性臂系统及其等效物理模型示意图
在PMLM驱动柔性臂做直线运动的过程中,柔性臂的弹性振动对电机动子具有耦合反力Fcoup的作用。因此,式(3)应改为

(5)
不考虑重力影响,狭长矩形等截面匀质柔性机械臂在其长度远大于截面宽度的情况下可看作欧拉-伯努利梁模型。由于柔性臂的弹性振动以一阶模态振动为主,且在小变形条件下,可以采用分布模型中的集中质量法来近似描述柔性臂末端的振动响应[11]。在耦合反力作用下,柔性臂振动的动力学模型可表述为

(6)
式中:meq为柔性臂等效到其末端的集中质量,其值为104×ρbhl/405;ξ为柔性臂等效结构阻尼。
柔性臂末端等效质量的移动位移为
p(l,t)=y(t)-w(l,t)
(7)
根据梁的弯曲变形理论,耦合力可以表述为
(8)
综合式(6)~式(8)可得直线平动柔性臂系统刚柔耦合动力学模型:

(9)
经过Laplace变换后得:

(10)
结合式(8)可得:

(11)
试验中利用粘贴在柔性臂根部的应变全桥电路检测柔性臂的振动信息,并通过仪表放大器将应变信号ε调理为电压信号:

(12)
式中:s0为应变片灵敏度系数;E0为全桥电路桥电压;xs为应变传感器位置;γ0为柔性臂的应变转换系数;w(x,t)为柔性臂在随动坐标系下坐标x处的挠度,当x=l时为末端的挠度。
在集中质量法和小变形假设的前提下,只考虑柔性臂的一阶振动模态,其根部与末端振动位移具有近似线性关系,结合式(12)可得:

(13)
结合式(10)可得:

(14)
得到PMLM的位置输出和应变传感器输出电压信号之间的传递函数。再结合1.2节提出的PMLM伺服控制系统的等效传递函数,可以认为从位置指令输入到应变检测电路输出电压之间存在等效传递函数关系。
3 试验平台与系统辨识结果
3.1 试验平台
为了开展基于PMLM柔性臂系统动力学模型辨识、柔性臂驱动残余振动抑制等试验,搭建了基于PMLM驱动的柔性臂试验平台。试验所用PMLM为湖南长沙一派生产的PMLM模组,其主要参数如表1所列。
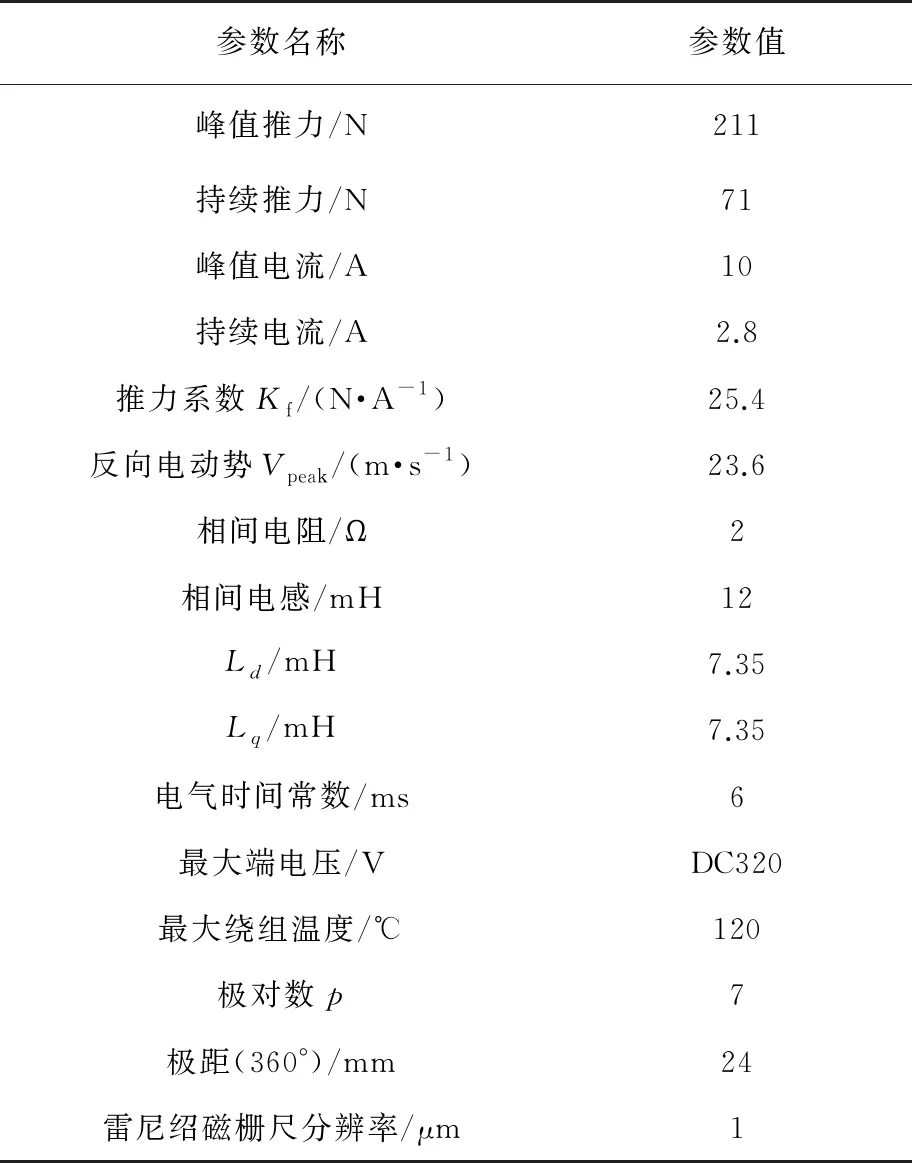
表1 PMLM模组参数表
柔性机械臂根部通过刚性结构固定在该PMLM的动子上,柔性机械臂采用环氧聚酯加工而成,其参数如表2所列。

表2 动柔性臂系统参数表
该试验平台包括:基于TI公司DSP芯片TMS320F28062的电机驱动器、环氧聚酯单连杆柔性臂、应变片全桥电路及仪表放大器采集模块、PMLM电机、分辨率为1 μm的雷尼绍磁栅尺位置传感器以及测量设备,如图3所示。
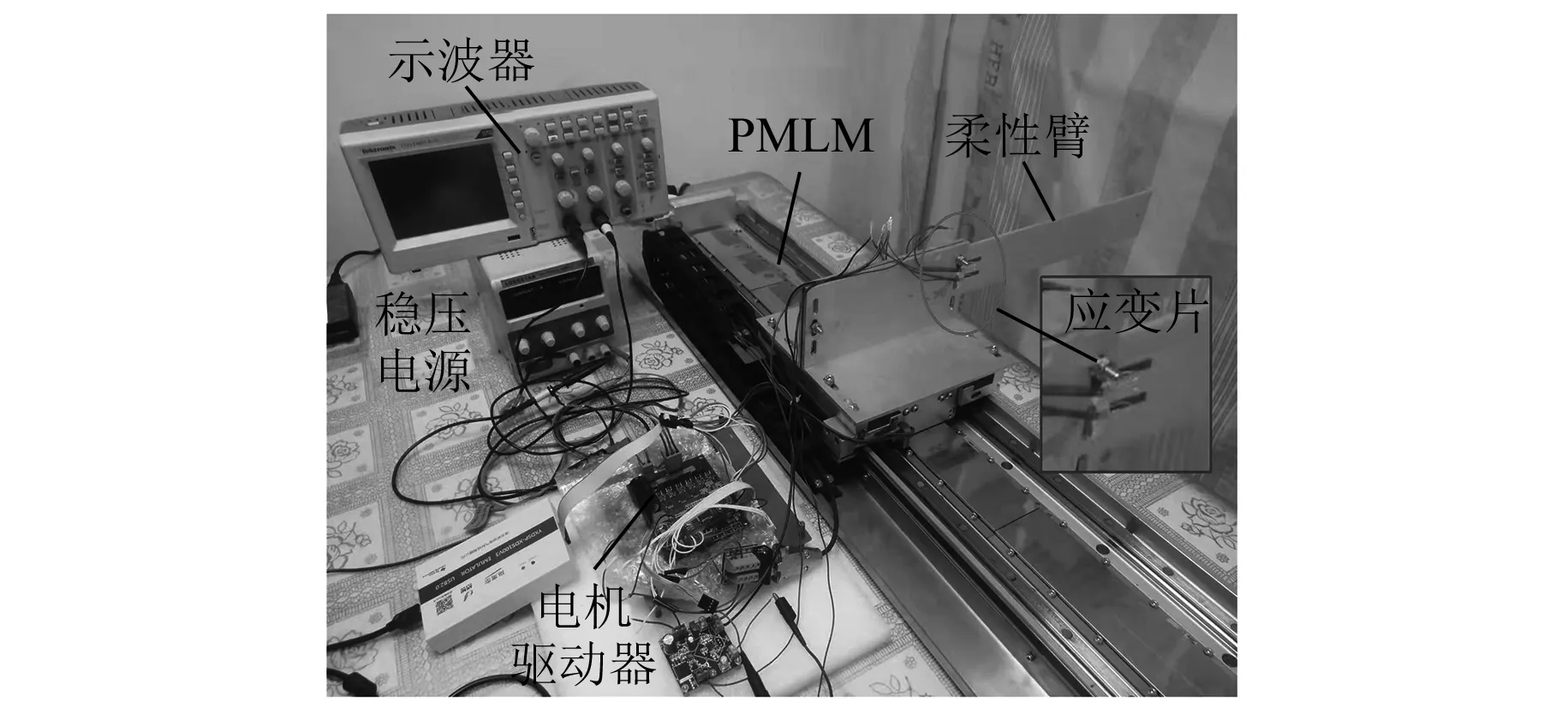
图3 基于DSP的PMLM试验系统试验平台
PMLM伺服驱动系统试验硬件结构图如图4所示。主要包括:系统电源、DSP芯片、基于场效应管MOSFET的三相逆变桥、IR2812S驱动电路、相电流采样电路、应变片全桥振动信号采集电路、正交编码器采集电路。

图4 基于DSP的PMLM控制系统硬件结构图
3.2 试验结果
分别对伺服控制系统输入2种位置指令信号:0.1 m阶跃信号和1~3 Hz幅值为0.05 m的正弦扫频激励信号,得到PMLM动子的响应位移和柔性臂根部的应变检测电路振动信号,运行时间为3.2 s,采样时间为0.001 6 s。将输入位移信号和振动信号转换后的末端位移信号即末端全局坐标p(l,t)用MATLAB系统辨识工具箱进行系统辨识,得到等效模型。
其中,输入阶跃位移指令信号得到的结果如图5所示。从图5可以看出动子的阶跃响应阻尼性能较好,不存在欠阻尼振荡的现象。末端全局坐标能体现柔性臂小阻尼弹性振动特性及和刚体运动的耦合,柔性臂末端最终在指定位移处衰减振荡。

图5 阶跃输入位置指令、动子位移和末端全局坐标的时域图
将输入位置指令和末端全局坐标代入MATLAB辨识工具箱,得到等效传递函数为
G(s)=

(15)
式中:B0~B6以及A0~A6为拟合系数。其中B6=-0.165、B5=19.6、B4=-2 519、B3=1.129×105、B2=-5.257×106、B1= 1.498×108、B0=7.963×108,A6=1、A5=37.86、A4=8 605、A3=2.556×105、A2=1.723×107、A1=2.835×108、A0=7.973×108。
将原始输入信号输入模型后得到的数据与实际末端全局坐标信号作对比,得到如图6(a)所示。从图6中可以看出,用已辨识得到的系统等效传递函数的仿真输出值与试验得到的实际值吻合度较高。图6(b)给出了其误差曲线,可以看出误差大部分时间在±4 mm以内。

图6 阶跃输入条件下末端全局坐标仿真和实际输出及其误差曲线
为了定量比对辨识模型与实际结构的近似程度,引入模型吻合度指标如下[9]:

(16)

输入1~3 Hz扫频激励信号得到的结果如图7所示。从图7中可以看出动子位移输出的幅值随着输入频率的增加而衰减,且有相移,体现了幅频特性和相频特性,末端全局坐标体现了柔性臂的弹性振动叠加在动子运动曲线上。

图7 扫频激励输入位置指令、动子位移和末端全局坐标的时域图
将输入位置指令和末端全局坐标代入MATLAB辨识工具箱,得到等效传递函数为
G(s)=

(17)
式中:K、B0~B6以及A0~A6为拟合系数。其中K=-0.025 6、B6=-2.77、B5=-995.6、B4=7 792、B3=-4.245×106、B2=2.544×108、B1=7.184×109、B0=3.702×109,A6=1、A5=48.27、A4=2.268×105、A3=1.746×106、A2=1.072×109、A1=7.039×109、A0=4.618×109。
将原始输入信号输入模型后得到的数据与实际末端全局坐标信号进行对比,得到如图8(a)所示。从图8(a)中可以看出,用已辨识得到的系统等效传递函数的仿真输出值与试验得到的实际值吻合度较高,运用式(16)得到吻合度为89.59%。其误差曲线如图8(b)所示,误差约在±5 mm以内。

图8 扫频激励输入条件下末端全局坐标仿真和实际输出及其误差曲线
4 结 语
为了解决PMLM驱动SLFM做点到点运动时存在残余振动从而影响柔性臂末端迅速精准定位的问题,本文研究了平动柔性机械臂系统的动力学建模及等效模型辨识问题,建立了从PMLM的动子位移到柔性臂根部应变振动信号的传递函数模型,采用阶跃输入法和扫频激励法进行了试验辨识得到等效模型。试验结果表明辨识模型的仿真输出与实际输出有较高的吻合程度,验证了模型辨识结果的正确性,反映了基于PMLM的平动柔性臂系统的动力学特性,为开展基于PMLM的平动柔性臂系统抑制残余振动控制提供了模型基础。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
石油沥青(2021年5期)2021-12-02 03:21:18
文化创新比较研究(2020年7期)2021-01-13 09:10:48
微特电机(2020年7期)2020-07-28 02:29:14
测控技术(2018年7期)2018-12-09 08:58:46
光学精密工程(2016年4期)2016-11-07 09:05:39
机械制造(2015年10期)2015-11-24 12:03:24
电测与仪表(2014年11期)2014-04-04 09:21:20
振动与冲击(2012年20期)2012-09-15 10:23:30
上海电力大学学报(2011年5期)2011-07-02 13:21:14
