
基于距离的无人机功率控制方案*
2022-09-28 01:40殷永旸王良明傅健
计算机与数字工程 2022年8期
殷永旸 王良明 傅健
(南京理工大学能源与动力工程学院 南京 210094)
1 引言
“无人机”全称为无人驾驶飞机,可由人通过无线电遥控远程操控,也可利用其自带的机载计算机以及预设的程序完全自主飞行[1]。近几年来,由于无线通信领域技术的不断进步,新型电池的推广使用,无人机行业得以蓬勃发展。5G 是为满足不断增长的移动通信需求而发展的新一代移动通信系统,5G 所带来的最大改变是同时实现人与人之间、人与物之间、物与物之间的通信,达到万物互联的美好愿景[2]。将5G 技术与无人机的结合,可以弥补无人机在时延和传输信号质量等各方面产生的问题[3]。
对于传统的功率控制方案考虑的公平性,希望控制小区内的所有用户的信噪比在同一个目标值[4]。功率控制方案分为开环功率控制[5]和闭环功率控制[6]。开环功率控制方案相较于闭环控制方案,减少基站回复路径损耗所带来的信令开销,是一种低复杂度的控制方案,降低使用成本[7]。功率控制还可分为集中式[8]和分布式功率控制[9]两种方案。集中式功率控制需集中控制所有用户的发射功率,较难实现,无法在实际中运用。而分布式功率控制只要每个用户的进行各自的功率控制,实现较为简单,也是目前研究的重点,并取得了大量的研究成果[10]。3GPP 标准化组织在R15 规范中规定对于PUSCH采用部分功率控制方案[11]。
然而,不同于地面用户,对于无人机用户来说,飞行高度较高并距离主服务基站较远,会使邻区的用户业务产生严重的干扰[12]。为了满足无人机以及其他地面终端需求,本文设计了一种针对无人机用户的基于无人机与基站距离的功率控制方案。本方案是一种开环的分布式功率控制方案,可以有效地削弱无人机对于地面用户的干扰,改善基站的整体通信质量。
2 无人机面临的挑战
无人机在各个垂直行业的应用不断丰富的同时,也给现有的无线通信网络带来了新的挑战,产生了新的问题,这些问题也在制约着无人机的发展。严重的地面用户干扰就是制约无人机用户和地面用户共存的主要挑战[13]。
对于大多数无人机而言,其基本上位于200m以下的空中,四周较为空旷。无人机和地面基站之间主要是视距通信,使之相较于地面用户设备,受到的干扰更大,如图1所示。
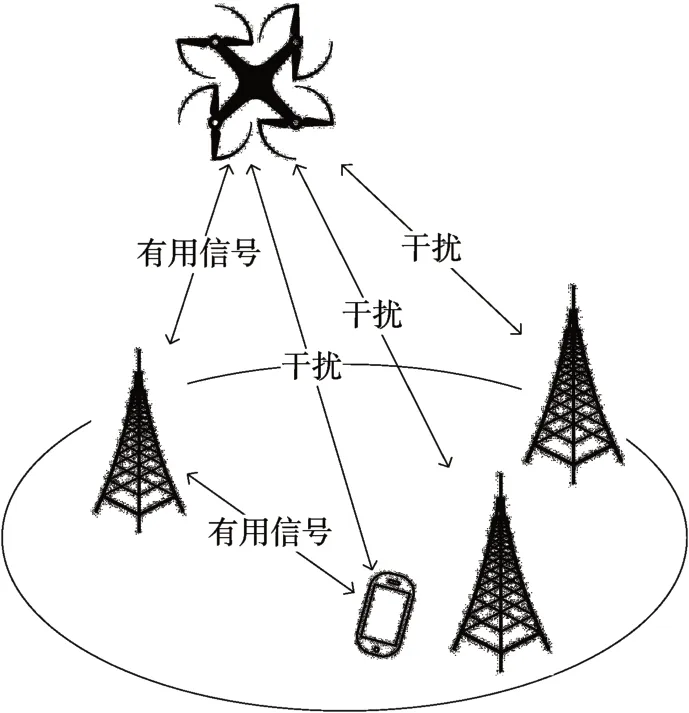
图1 无人机干扰示意
就下行通信而言,无人机系统还会收到除了主服务基站外的许多相邻小区的下行信号,导致糟糕的下行链路性能[14]。另一方面,上行通信场景中,无人机因为相较于其他地面用户所在的信道质量较好,使得许多相邻的地面基站受到影响,这会导致其他地面用户的通信性能下降,从而使整体通信质量的恶化。因此,需要对于地面用户干扰采取有效的抑制措施。
3 针对无人机的5G解决方案
对于其他地面用户干扰抑制,可以通过功率控制方案来实现。开环功率控制方案相较于闭环控制方案,减少基站回复路径损耗所带来的信令开销,过程较为简单。早先的功率控制是让小区中用户的信噪比达到一致,其公式如下:

式(1)中SINRtarget代表目标信噪比,PSDTx代表终端发射功率,Iserving代表终端所在小区的干扰功率,PLserving代表基站与终端之间的信道路径损耗功率,PSDmax代表终端所能达到的最大发射功率。这种传统的功率控制方法主要针对的是普通地面用户和基站之间的通信,其目的也是使得目标信噪比一致,但是这种控制方法不适用于无人机用户。
对于无人机而言距主服务基站的距离较远、高度较高会导致无人机与其视距信道概率的增加,使得无人机用户通信信号强度远大于其他地面用户,给地面的其他用户和基站带来严重的干扰[15]。并且当无人机的飞行距离越远,其与其他地面基站信道为视距信道的概率也越大,对于邻区的干扰程度也越大。所以当使用传统功率控制方法时,过大的无人机发射功率会使得整体的通信质量下降。为了削弱这些干扰带来的影响,本文采用基于距离分组的功率控制方案来针对性的解决无人机的功率控制问题。公式可以改写为

式(2)中β为补偿因子,PL是用户估计的信道路径损耗。这里可以按照距主服务基站的距离的不同对无人机进行分组,并且设置不同的β值,通过对于路径补偿因子的调整,来降低飞行距离较远的无人机的通信功率。根据文献[16]的结论,对于距主服务基站的距离在50m 以内的无人机可以按照地面上的用户终端处理。并将200m作为近基站用户和远基站用户的分界点,将无人机按照距主服务基站的距离分成3 组,具体的分组方案如下:0~50m 的无人机与地面终端用户采用相同的功率配置方案;50m~200m 的无人机采用较低功率配置方案,调小补偿因子β;对于距离在200m以上的无人机采用低功率配置方案,继续调小β的值。基于距离的功率控制方案流程如图2所示。
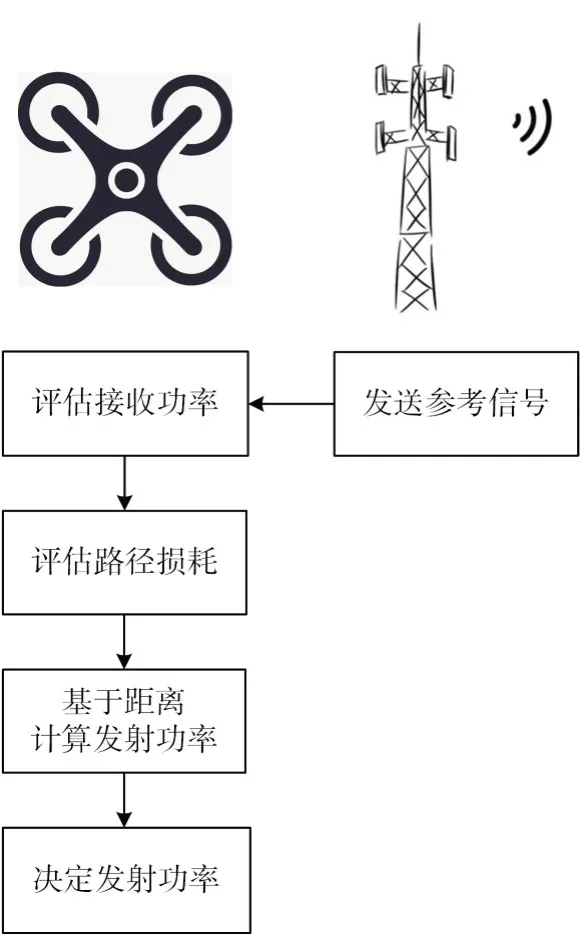
图2 基于距离的功率控制流程
4 仿真验证
4.1 仿真参数配置
对于基于距离的功率控制方案通过无人机5G通信仿真平台进行仿真分析,仿真场景和参数配置见表1。
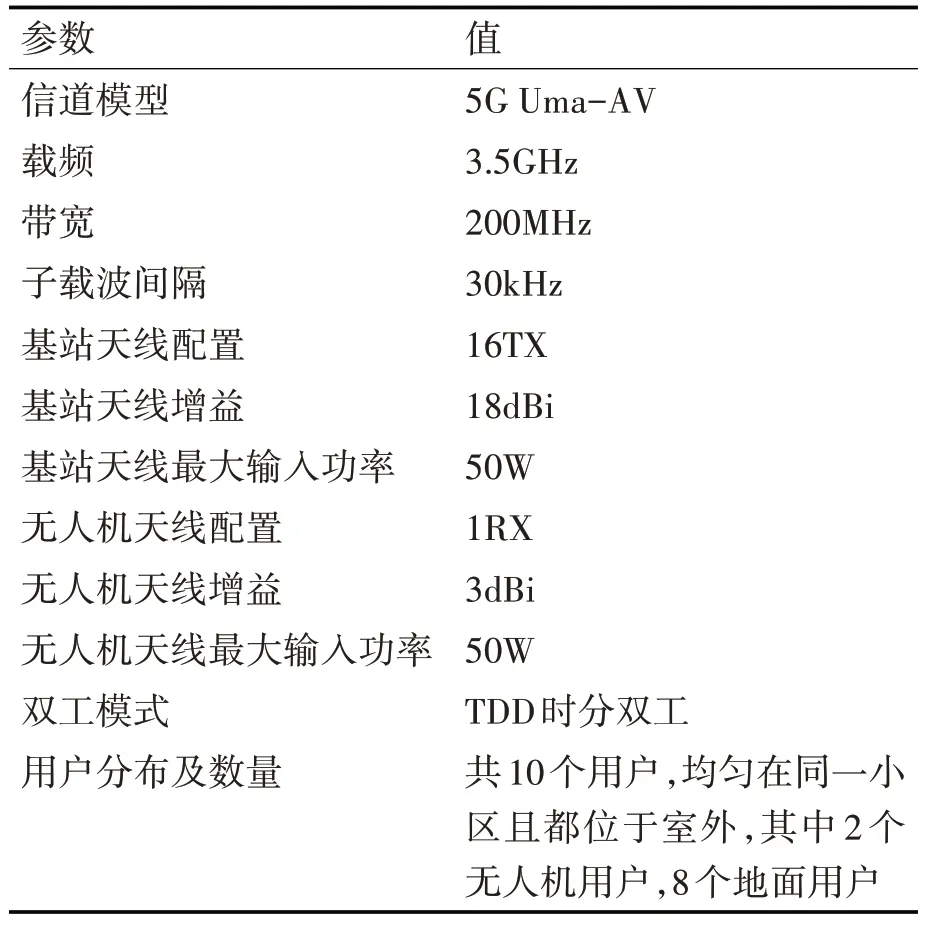
表1 基于距离功率控制部分仿真参数
4.2 仿真结果与分析
对于β的具体取值需要综合考虑无人机的实际部署情况和环境影响,这里给出了一组参考取值并给出了结果对比分析。
在对照组中,地面终端用户取β=0.8,无人机用户也取β=0.8。
在采用距离分组的功率控制分组中,地面终端用户取β=0.8,无人机用户距离小于50m 时:β=0.8;小于200m时:β=0.76;大于200m时:β=0.74。
从表2 中可以看出对于不同距离的无人机调整补偿因子β的大小,使得其他地面终端用户的通信速率提高,但是同时也会导致无人机的通信速率的降低。对于功率控制组地面终端的边缘用户可以获得22%的性能增益,50%的终端获得41%的性能增益,平均用户吞吐量获得21%性能增益。对于无人机用户的功率控制方案中,边缘用户造成7%的性能下降,50%的终端造成6%的性能下降,平均用户吞吐量有4%的下降。
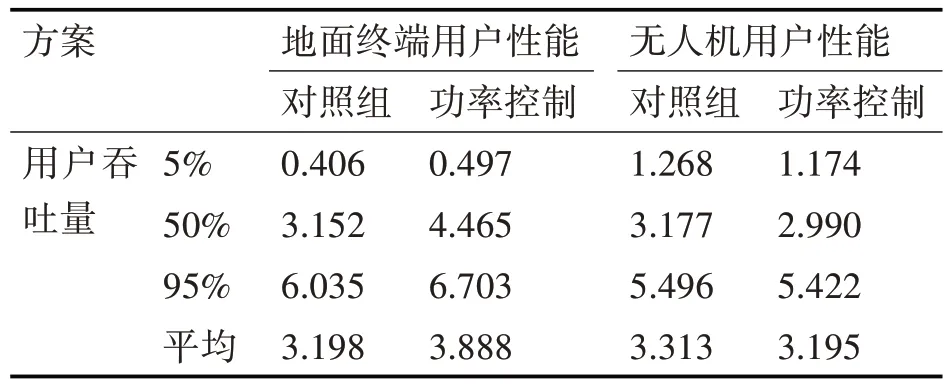
表2 基于距离的功率控制通信速(Mbps)
这种以距离分类的功率控制方案虽然会造成无人机用户的性能下降,但是相较于地面终端用户的性能大幅提升,无人机用户性能下降幅度较小,因此在无人机对地面用户有强烈干扰的时候可以考虑本方案。
5 结语
本文针对无人机应用中面临的对于地面用户的干扰关键问题进行详细分析,由于现在没有适合无人机的功率控制方案,针对性地提出了一种基于距离分组的无人机功率控制方案。本方案为开环的分布式功率控制方案,相较于传统功率控制方案增加了补偿因子,并且根据无人机与基站距离不同,调整补偿因子的值。通过仿真实验的结果可以看出,虽然无人机用户的性能相较于之前有一些下降,但是其他的地面用户性能均有较大的提升,使得小区整体的通信质量得到了较大改善。本方案的应用,可以有效地降低无人机用户对于其他地面用户的干扰,优化整体通信质量,从而可以满足无人机在各个垂直行业的部署需要。
猜你喜欢
舰船科学技术(2021年12期)2021-03-29
软件导刊(2019年7期)2019-10-11
科学与财富(2019年11期)2019-08-06
软件导刊(2018年1期)2018-02-01
中国新通信(2017年12期)2017-07-16
中国新通信(2016年21期)2017-01-06
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中国新通信(2016年2期)2016-03-11
CHIP新电脑(2016年3期)2016-03-10
