无人值守智能称重交叉验证技术
2022-09-26 07:28赵得强王吉会
数字通信世界 2022年8期
赵得强,王吉会
(1.龙口滨港液体化工码头有限公司,山东 龙口 265700;2.烟台天讯信息技术有限责任公司,山东 烟台 264000)
0 引言
近年来,随着我国经济的高速发展,仓储物流行业也迅速崛起,许多企业都建设了无人值守称重管理系统,该系统能对电子磅进行科学有效的管理,同时减少了人员的劳动强度,提高了工作效率。但是大部分无人值守系统都将重点放在快速通行和称重管理上,没有对电子磅数据作假和闭环核放情况进行深入的技术研究,使得不法分子有空可钻。因此,笔者结合个人多年来的一些工作经历和建设油品出库一卡通无人值守智能地磅的经验,通过交叉验证技术,实现了客观称重和闭环管理及智能核放,防止数据作假情况的发生。
1 零点斜率监测技术
电子地磅数据作假,第一种主要是零点数据作假,其原理是,通过更改或控制仪表零点数据来实现,地磅遥控作弊大部分采用改变零点的方法,对此,我们采用了零点数据采样校证技术。系统在地磅开始工作时和工作中会记忆空秤零点的大小,如果零点发生变化,系统会采样取得电子磅空闲时的零点数据,显示器的零点显示值也会产生变化,如果变化超过正常的阈值,系统会自动报警和切断称重数据。考虑到天气的影响及设备老化等因素,同时我们还会自适应零点漂移,跟踪正常的零点数值,去除干扰,减少误报。下面是我们在无人值守系统中为防止零点作假,采用斜率技术进行监测的设计。
为了防止假冒零点,采用雷达和车辆触发器自动进行车辆上磅检测,当管理服务器检测到电子磅上没有车时,采样仪表上的称重数据,并自动计算该数值在质量曲线上的斜率k=(y1-y2)/(x1-x2),以备后用。理想情况下,斜率k=0 ;考虑到干扰及零点漂移等情况,采用自学习自校正技术来校准仪器零点,设定零点斜率阈值,如果某时间点的零点斜率出现异常,系统自动记录并进行零点数据异常报警,同时自动切断称重数据。如图1所示。
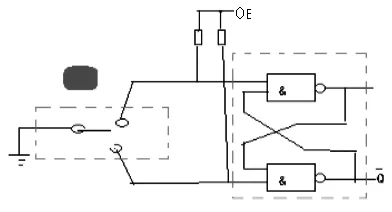
图1 电子磅车辆自动检测器
设定电子磅单向通行,即电子磅为单向磅。电子磅上电正常运行后,设定,然后对Q端进行检测,Q=0确定地磅为空磅,磅上没有车。这时,系统采集电子磅的零点数据,进行零点斜率效验。当电子榜上有车进入时,系统会自动检测到车辆上磅,这时Q=1。
流程图见图2。
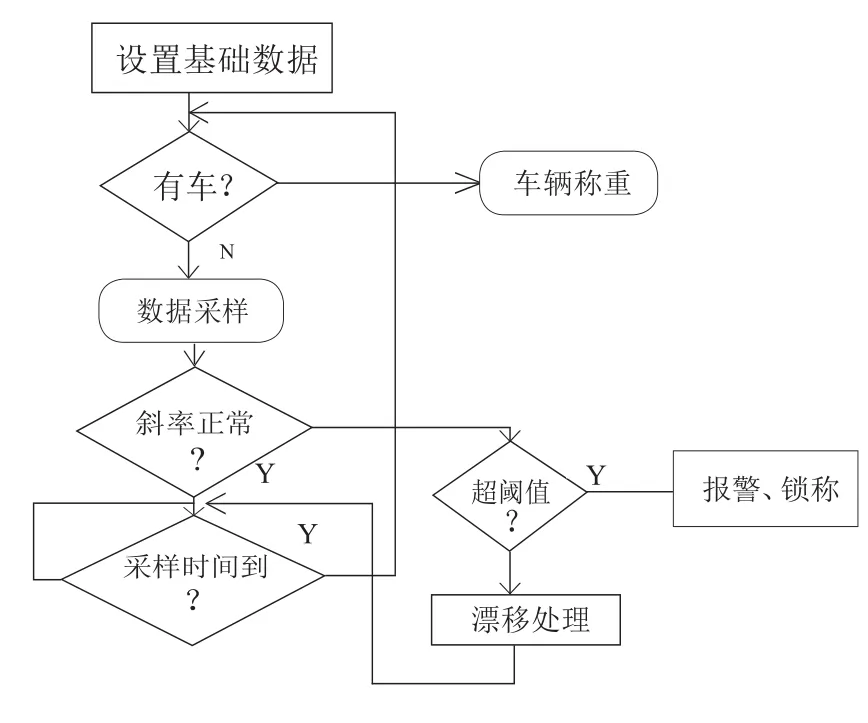
图2 电子磅零点斜率校验流程图
2 最小二乘方法和最大熵法防作弊技术
采取零点数据防作假措施后,还要注意防止称重过程中的数据作假。许多司机试图通过采用改变系统数据的方法来赚取不义之财。如图3所示,电子磅上面没有车也就是空称时,滑片在滑动变阻器的上端,R1阻值最大;有车时,滑动变阻器在重压下下滑,R1有效阻值变小,这样电流对应的质量就会显示在显示器上,实现了电子磅的客观称重。
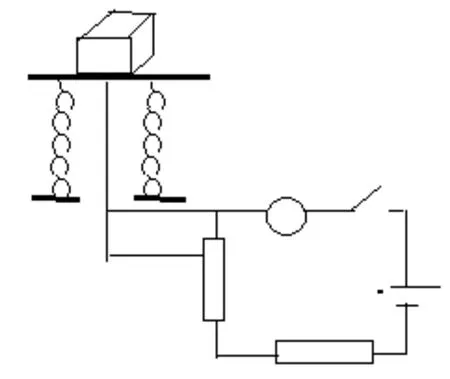
图3 电子磅称重原理图
如果人为改变R1或R2的阻值,称重数据将发生变化并且不再客观,作假装置(遥控芯片)通常安装在称重传感器的信号电缆、称重显示仪表和接线盒内。作假装置加装并启动后,对地磅的电阻进行控制,改变地磅电流从而改变地磅称重数值。这种手段比较隐蔽,不易发现,所以我们应该特别注意,加以防范。
对于改变电子磅增益的作假方法,我们主要采用了最小二乘方技术和最大熵技术来进行预防。基本原理是:采用雷达和车辆触发器自动进行车辆上磅检测,当检测到车辆时,系统软件经串口分配器接在表头RS-232口上面,按照电子磅通信协议,读取车辆质量,然后进行多种方法交叉并用的防作假检查[1]。
最小二乘方法(又称最小平方法)是就是通过最小化误差的平方和,求得系统的直线函数,使得称重实际数据和预测数据基本相符,称重数据客观公正。
一般来说,电子磅模数转换后的数字和车辆在地磅衡器上的质量是线性关系。出厂前已经标定好。我们可以根据理想直线计算出数字与质量的斜率后作为一个参考数据存储起来。在实际称重时,采用最小二乘方法,将称重数据{X1,Y1},{X2,Y2},...{Xn,Yn}与直线y=a+bx进行拟合;误差为ei=yi-(a+bxi),我们使误差为最小,也就是最小。求导然后依据yi=a+bxi,j= 1,2,…m的结果,与实际称重结果进行核对,然后检查称重数据,当误差超过阈值时,进行报警,同时切断称重数据,将相应的车牌号录入重点检查名单内。
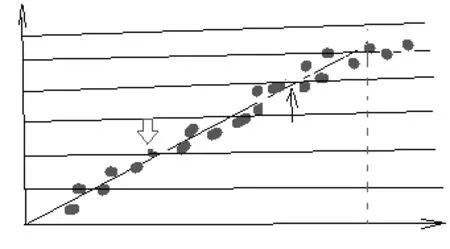
图4 车辆称重离散数据图
在采用最小二乘法进行曲线拟合时,我们实际在进行智能称重的过程中,得到的中线是一些离散的点,它不是一条顺滑的曲线,因此我们的拟合直线,需使用中线平均法和经验数据法对拟合曲线进行修正,这样保证数据更精确。
信息熵是信息量的表示方法。对于随机变量X,嫡可定义为:总高度为fi离散分布的数据的熵为为第i个数据的值。
对于有约束条件的情况,采用拉格朗日乘子法来求解最大熵。在计算机中,可以通过迭代算法等数值解法进行求解[2]。
在电子磅称重过程中,最大熵预测法与最小二乘法法交叉使用,复合验证车辆真实质量,进行称重数据客观性检查和处理[3]。
3 DGPS定位和闭环核放技术
作业车辆进入油品库区内后,我们还需要对运输车辆进行位置监控。为了提高定位的精度,加强对车辆的监管,我们采用了差分GPS(DGPS)对运输油品车辆在库区内的行驶过程进行监控和定位。设已知基准站的精密坐标(x0,y0,z0),可求坐标改正数:,通过网络发送出去,用户接收机接收后改正:考虑用户位置改正的瞬时变化,可得:这样在用户坐标中消去了基准站与用户站的共同误差,可以非常精确地监控油品车辆在库区内的运行情况。若车辆在库区内停留,当车辆停留超过规定的时间后,系统会自动提示并报警,将车牌号计入重点检查名单内。
当库区内的车辆离开时,需要进行合规性检查。大部分库区油品车辆出门核放仍然采用人工验放和纸质票据为主的管理方式,导致了验放时间长、小票容易污损和丢失,无法复合认证等缺点,容易产生舞弊和人情核放情况。为克服传统验放方式的缺点,防止作弊和人情核放,加快通行效率,我们采用电子车牌识别技术、作业车辆IC卡识别技术、作业车辆流程验证的闭环验证技术,出门时,司机刷IC卡,车牌识别系统自动识别车牌,进行流程验证,三种验证都符合要求,电子道闸自动抬杆,记录放行。否则,车辆存在着违规情况[4]。
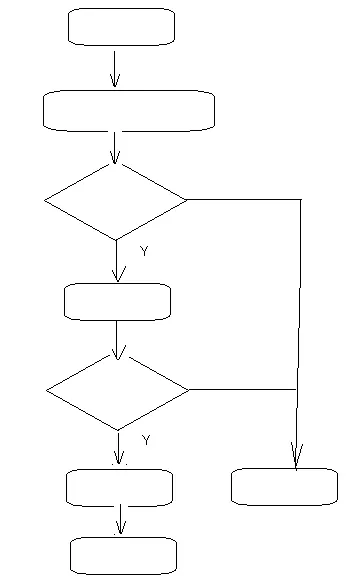
图5 电子磅称重验证流程图
这种验证技术,加快了车辆在进出口的通行速度,同时提高工作效率,堵塞了管理漏洞,起到了良好的效果。
4 结束语
综上所述,随着生产的发展和科学技术水平的进步,无人值守系统的使用越来越多,因此,无人值守系统除了要将重点放在快速通行和称重管理上,还应该对电子磅数据作假和闭环核放情况进行深入的技术研究,杜绝无人值守系统的漏洞,使得无人值守系统的安全性不断提高,技术手段逐步加强,使得不法分子无机可乘。对于无人值守系统我们不仅要加强管理,增加巡查力度,还要通过坚持使用多种的先进技术,使用先进科技手段,提高系统的健壮性,以提高过磅水平的方式来减少企业的经济损失,杜绝“跑冒滴漏”情况,保证公平公正交易,保证衡重过程的客观性,为社会的和谐发展做出贡献。■
猜你喜欢
新高考·高三数学(2022年3期)2022-04-28
——人格测验作假研究述评
企业改革与管理(2021年17期)2021-10-08
中学生数理化(高中版.高考数学)(2021年5期)2021-07-21
中学生数理化(高中版.高考数学)(2021年5期)2021-07-21
物理之友(2020年12期)2020-07-16
福建中学数学(2016年7期)2016-12-03
共产党员(辽宁)(2015年14期)2016-01-27
中学数学杂志(初中版)(2014年1期)2014-02-28
福建中学数学(2011年9期)2011-11-03