浅谈激光三角测距技术
2022-09-23 02:08:52贾治国
科技创新导报 2022年13期
贾治国
(中国电子科技集团第27研究所 河南郑州 450047)
激光测距传感器种类繁多,大体工作原理一致,但是由于应用场景不同,其设计条件也不一样。以激光三角测距来讲,在激光三角测距仪设计过程中,经常要考虑测距范围和测距精度的取舍问题。为了加深研究和方便用户选型,本文通用激光测距的原理和特点进行了详尽分类对比说明,并且针对激光三角测距技术物面上位移量与像面上的位移量的非线性关联关系进行推论验证,以促进激光三角测量技术的进步。
1 激光测距技术原理分类
激光测距[1]技术按照工作原理划分为两种,分别是光程测距法和激光三角测距法。
1.1 光程测距法
光程测距法是利用光速和往返时间的乘积的一半来描述,一般用于远距离测量。如果激光[2]以速度C在空气中传播,在A、B 两点间往返一次所需时间为t,则A、B两点间距离D可用下列表示:

1.2 三角激光测距法
三角激光测距法是利用激光的高方向性、高单色性和高亮度等特点可实现无接触远距离测量,一般适用于高精度、短距离的测量。为了保证测量精度,激光光束质量要求能量分布呈高斯分布,原则上一般包含激光发射装置、目标物、光电接收装置3 个部分,空间布局呈“三角形”,一般也称为激光三角测量法。如图1所示,激光发射器的发射固定波长激光束,垂直照射到非镜面目标物相对O点高度点A,形成测量光斑,经过目标物漫反射的能量,经接收光学[3]镜头T 成像在光电探测器CCD[4](CMOS)器件上,光学镜头前置带通滤光片滤除环境光影响。当被测物体沿激光方向发生移动时,光电探测器上的光斑将产生移动,其位移大小对应被测物体的移动距离,CCD 器件上的像点位置与激光光斑空间位置进行函数关联,通过几何换算,可根据像点的相对CCD起点位移量X,求出A物点与相对O点的位移H。
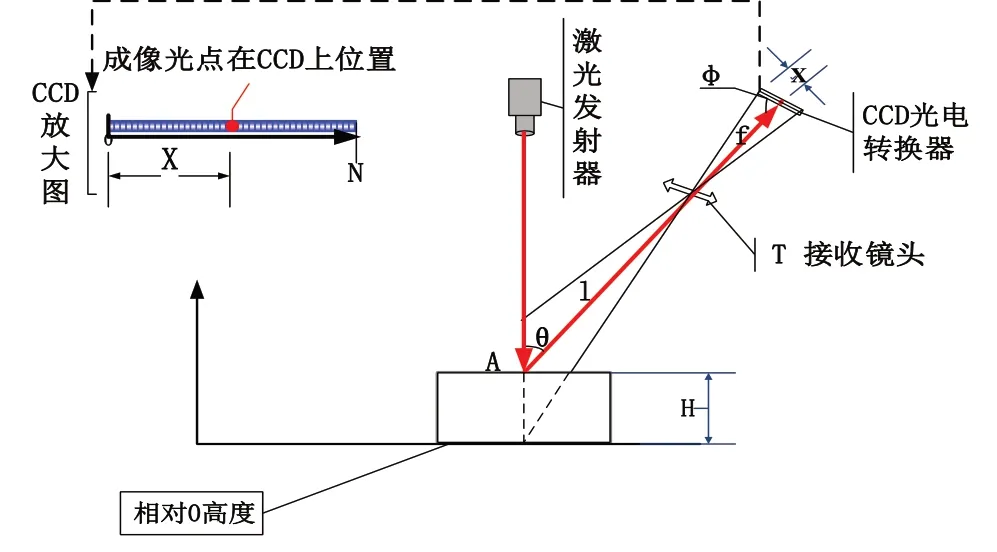
图1 激光三角测量原理图
2 激光测距技术方法分类
激光测距仪按照技术实现方法分为3 种,分别是脉冲[5]式(回波法)激光测距法、相位式激光测距法和三角激光测距法。
2.1 激光测距技术方法分类性能指标对比列表
激光测距技术方法分类性能指标对比如表1所示。
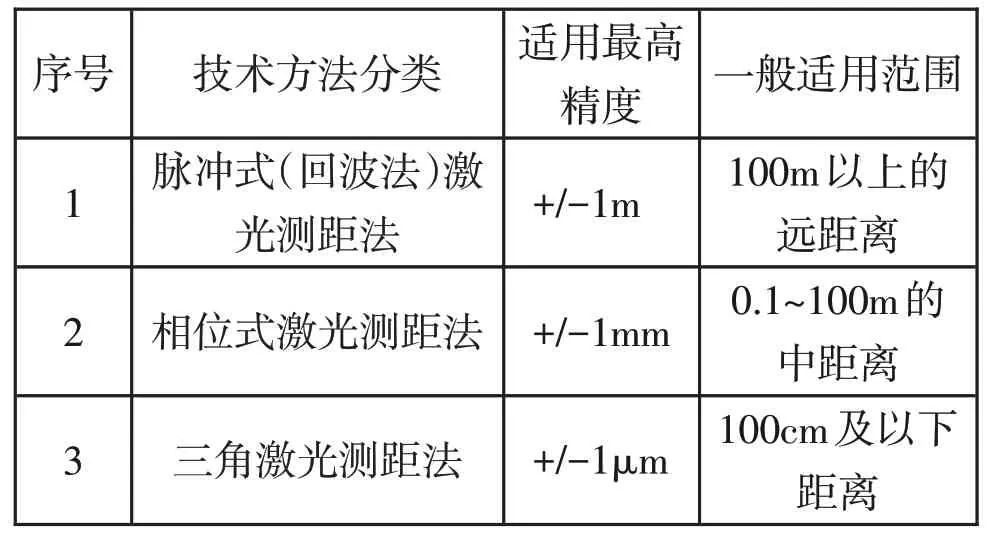
表1 激光测距技术方法分类性能指标对比
2.2 激光测距的技术方法描述
脉冲激光测距简单来说就是针对激光的飞行时间差进行测距,因为空气中激光传播速度很高,注定一般测量距离激光传播时间很短。为达到高速精确测量,这就要求激光脉冲宽度很窄,能量在时间上相对集中,功率密度很大,计数电路的填充频率经常要求达到皮秒级别。
脉冲式激光测距法原理如图2所示。通常设定光速恒定C,由激光发射装置发出一个(或多个)持续时间极短的脉冲激光,设置高速计数电路,计数填充频率f,激光发射开启输出点时间定义为t0,同时开启计数电路,经过直线距离S之后,激光在被测目标表面形成散射,散射光的部分能量被预设波段的激光接收系统中的光电探测器接收,高速计数电路准确记录激光回波信号到达时临界点定义t1,结束计数,计数为N,那么计数时间间隔(t1-t0)=N/f,因为激光飞行距离即为2 倍待测距离S,飞行时间为N/f,就可以通过速度C 与时间N/f的一半计算出目标物体与发射出的距离S,为了该距离更加精确,也可以通过(脉冲串)多次的测量结果进行累计平均输出。
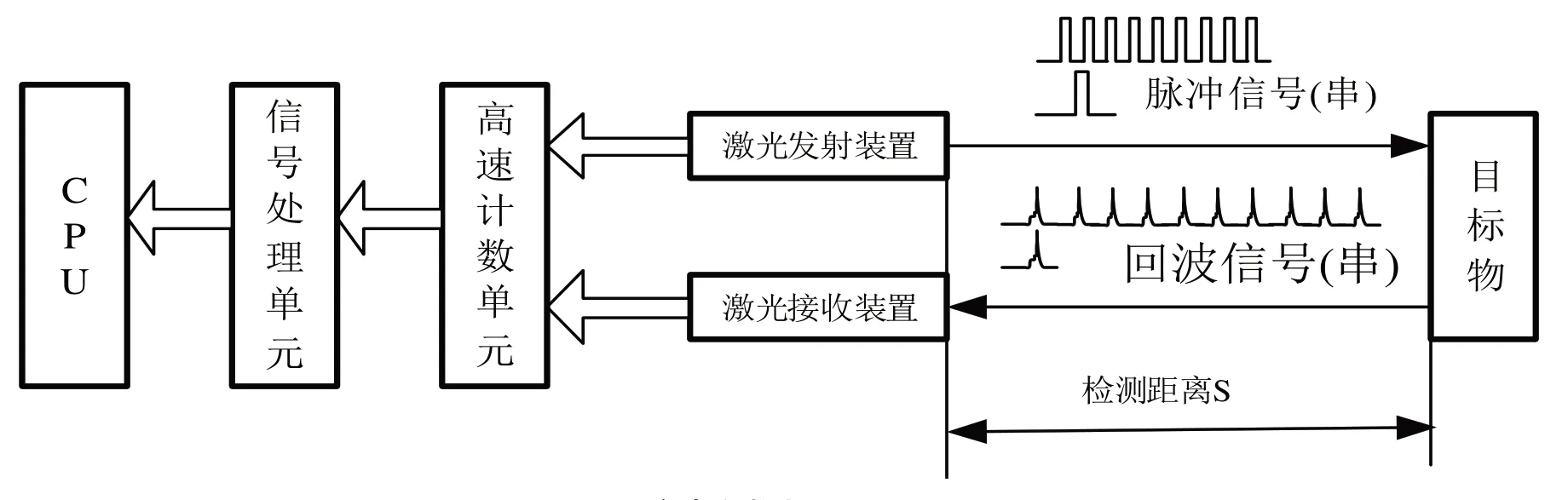
图2 脉冲式激光测距原理图
2.2.2 相位式激光测距法
相位式激光测距仪是将一调制信号对激光发射光波的光强进行调制,通过测量测定调制光往返测线一次所产生相位延迟来间接测量时间,再根据调制光的波长,换算此时相位延迟所代表的距离S。
根据测量原理,同时忽略激光在目标物微小反射角影响,存在公式:

式中,C 为激光传播速度;f 为振动频率;N 为测线所包含调制半波长整数个数;Δφ为信号往返测线一次产生相位延迟不足半波长部分。
在给定调制和标准大气条件下,频率C/(4πf)是一个常数,此时,距离的测量变成了所包含半波长个数的测量和不足半波长的小数部分的测量,即测N 或φ。可以看出,如果采用一个测尺频率f 时,测距结果只能显示不足一周的相位差所相应的测距尾数,超过一周的整周数所相应的测距整尺数就无法呈现,因此,相位式测距仪实际电路处理中还包含一组粗测尺的振荡频率。把精测尺与粗测尺的结果组合起来,就能得到整个待测距离的数值了,类似于游标卡尺主持刻度加细分游标刻度合计计算。
一般国土资源所档案管理员都是兼职的,没有经过系统、专业的档案管理培训,缺少档案管理的专业知识,对土地业务档案缺少深入细致的分析,从而影响了国土资源所档案资料的收集、整理和利用。存在想存则存、不存也无所谓的情况。同时,大部分基层所档案工作还处于“重藏轻用”的被动,单一封闭式状态,对外服务作用发挥不大。坐等利用者上门,仅限于原始资料的查询,主动介入服务当地经济发展和民生的意识较差,由于档案台帐不健全,借阅制度未建立,只存不用,档案的利用程度低,难以体现和发挥国土资源档案在新农村建设中的作用。
2.2.3 三角激光测距法
三角激光测距法原理如前介绍,即激光光源、被测物面、光接收系统3 点共同构成一个三角形位移测量方法,鉴于其稳定性好精度高,常用在工业品长、宽、厚尺寸测量、平直度、轮廓等方面。
3 三角激光测距的物象关系推导
三角激光测距为了达到一定的分辨率和足够的接收信号强度,系统采取了激光发射线与接收镜头光轴有一定的角度的接收方式采集成像,此时,就会在像面上引起像面倾斜。三角测距物象关系原理图如图3所示。
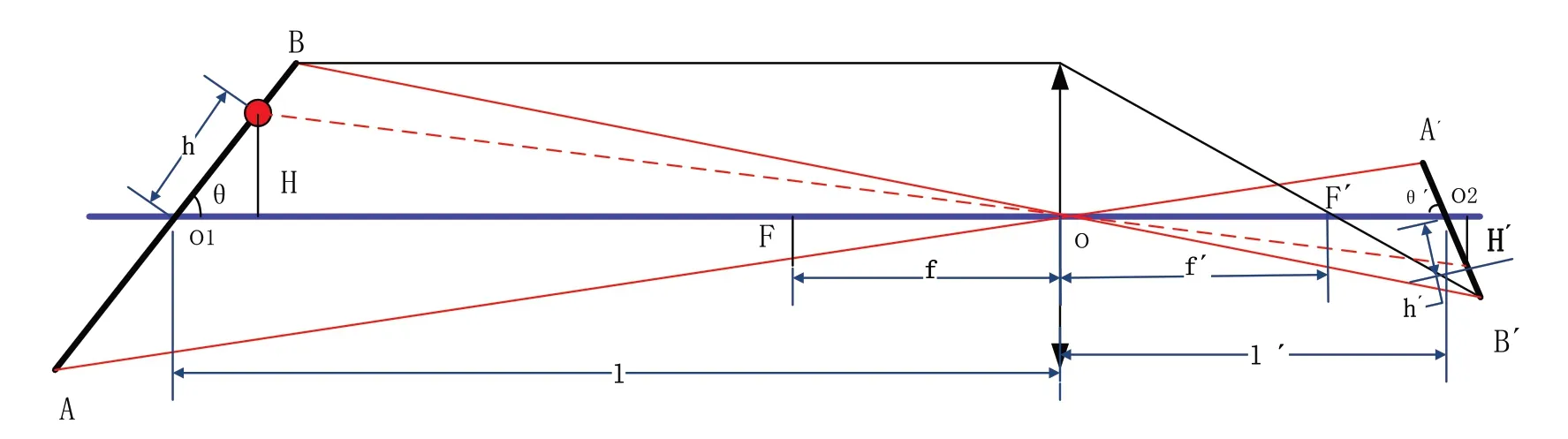
图3 三角测距物象关系原理图
在理想光学系统中,表征物象关系[6]的重要参数的垂轴放大率β与轴向放大率α之间满足如下关系式:

假定H是物面上的一点,Hˊ是像面上的点,二者是一对共轭点。它们的坐标为H(l-h·cosθ,h·sinθ),Hˊ(lˊ+h·cosθ,h·sinθ),对于理想光学系统来讲,有如下二式成立(不考虑符号和像的倒正)。
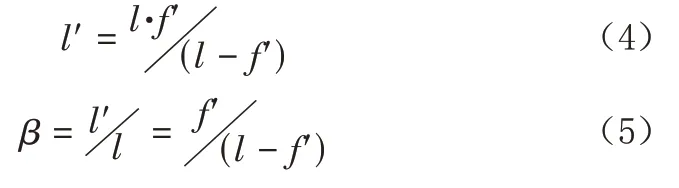
由H和Hˊ二点的坐标可知,有如下关系:
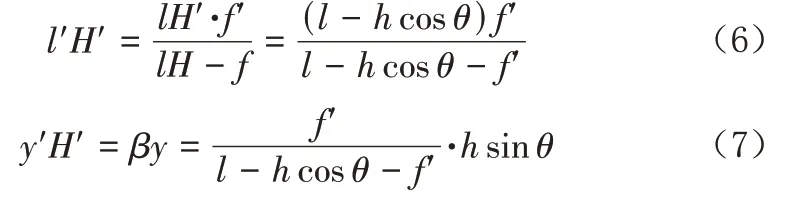
由式(6)化简(省略l'H'的下标即表示为l'),求得到式(8):

将式(8)代入式(7)化简,求得到式(9):

针对式(9)数学[7]求导数运算,得到式(10):

式(9)、式(10)表明物平面倾斜后,像平面仍然是一个平面,并且与光轴成一定的夹角,像面的斜率就是式(10),像面与光轴的倾角如式(11)描述:

yˊ的坐标存在如下关系:

整理式(12)得出:

为了简化设定:a = fˊ·cosθ,b = sinθˊ·cosθ,c =(fˊ- f)·sinθ,且存在θˊ= arc tan(·tan θ),则化简得到h与hˊ的关系式如下:

因此,式(14)表明,物面上位移量与像面上的位移量之间的函数关系式,当一个光学系统确定之后,即fˊ、l、θ及θˊ等都会确定,那么就可以通过像面上的位移量hˊ计算[7]出物面上位移量h。当然,实际使用三角激光测距仪的时候,还要考虑光斑质量、CCD像素[8]数量尺寸大小、光学相差、电路噪声等诸多因素,所以,通常对应用于固定场景的三角激光测距仪来说,要进行二次数据标定,以此消除测量系统误差。
4 结语
通过原理和公式推导,说明三角法测距物面上位移量与像面上的位移量是关联的,而且是非线性关系,但是存在单调关联特性。由于设计过程中三角激光测距仪选型光电传感器的尺寸一般是线性固定的,因此,三角法测距量程越大,精度越低。
猜你喜欢
科学咨询(2020年53期)2020-03-19 07:41:46
科学(2020年3期)2020-01-06 04:02:51
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
测控技术(2018年6期)2018-11-25 09:50:24
通信电源技术(2018年5期)2018-08-23 01:16:04
制导与引信(2017年3期)2017-11-02 05:17:00
电子制作(2017年7期)2017-06-05 09:36:13
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50