
小卫星集群系统任务规划与控制方法*
2022-09-09 01:50左小玉陈天冀
航天控制 2022年4期
白 雪 左小玉 陈天冀 徐 明
1. 北京航空航天大学 宇航学院, 北京 100191 2. 北京航空航天大学 未来空天技术学院/高等理工学院, 北京 100191
0 引言
近年来,现代小卫星优势在国内外空间探测任务中体现的越来越明显。小卫星具有成本低、研制开发周期短、应用前沿技术、可靠性高的特点,成千上万的小卫星可构成集群,通过群体行为共同实现空间任务[1-3]。
自然界中常见的群体行为通过具有自主行为能力的个体相互配合,共同合作完成任务,呈现集体自组织性和有序协同性[4]。对于复杂的空天任务,传统的航天器星座、编队等空间构型已无法满足对于自主任务、分布协同和系统进化的需求,因此利用飞行器的集群行为,借助集群感知、智能决策、协同控制等技术,代替大卫星进行空间任务,极大地扩展了卫星的探测区间或侦察范围,使小卫星集群协同任务模式发挥更大效能。针对目标检测任务,小卫星集群可以实现多点分时的多重覆盖。小卫星集群采用分布式轨道转移控制,任务群族相邻小卫星直接通信,可以减少信息量,降低计算机和通信的要求,易于实现[5-7]。不同于传统编队飞行具有绕飞中心且关注成员个体的位形分布,大量小卫星组成的集群系统不再具有成员间明显的隶属关系,关注整体分布,传统主从式航天器控制方法已不再适用[8],需要对空间集群整体任务规划模式与智能协同控制进行研究。
目前已有多个国家的相关机构开展了航天器集群的研究工作。美国国家航空航天局(NASA)提出一种探测小行星带的卫星集群系统(ANTS),利用1000颗小卫星组成的星群,完成小行星带探测,其中群卫星系统被划分为不同等级,搭载不同载荷,利用群智能技术实现信息交互[9]。美国国防先进研究计划局(DARPA)提出一种将航天器以组为任务基本单位,利用无线通信技术,代替单个大型航天器进行空间任务的方案(F6系统)。该方案以信息交互为纽带,灵活处理星间信息,实现传统单一卫星上各子系统的相应功能,并验证了卫星集群相比单个大卫星具有更广泛的适应能力且大大降低成本[10]。英国格拉斯哥大学提出一种利用航天器集群组成“天基镜群”的方案,主要依靠安装在集群表面的镜面将太阳光反射到小行星表面,从而使小天体受热产生推力改变轨道。结合全球定位系统和星载自主导航系统,此方案还可以精确确定小行星变轨时间[11]。
可以想像,未来外太空任务将以运行在近地轨道上的巨量小卫星星群形式进行空间任务规划与探测,由此带来的应用效益远大于若干颗大卫星带来的影响。因此本论文关注小卫星大规模星群,对空间集群任务规划模式进行研究,引入集群智能协同与规划,实现智能指挥与训练决策,进行系统整体自主协同控制,为我国未来开展小卫星大规模集群设计与任务规划提供必要的理论基础和技术支撑。
1 小卫星集群任务规划模式与流程
小卫星集群任务规划通过从底向上、总分总的系统,发挥分布式特点,实现对空间目标的特定任务。本文将小卫星集群系统分为作为空中轨道基地的“空间基地”和其上所携带的大规模小卫星星群两部分。其中,“空间基地”部署在近地轨道上,具备较强的变轨能力,为小卫星星群提供支援与承载、燃料补给、资源保障等功能,并进行环境感知和态势评估等职责;小卫星构成任务星星群小组,小组内包含多颗任务星与一颗指挥星,由“空间基地”在目标附近指定位置释放,具体执行任务指令,一次任务可根据需求和任务评估释放多个星群小组。星群可以依托“空间基地”根据不同需求,进行任务构型的快速解算与相应种类有效载荷的高效装配,从而进行协同自组织管理运行,实现单一航天器无法完成的复杂任务。执行任务指令期间,“空间基地”通过对空间环境的感知,利用智能指挥与决策,执行自主任务规划的运行机制,明确任务星星群任务模式与规模,并根据任务评估结果进行多轮次任务部署。
本文中小卫星集群能够实现的任务模式包括:目标探测、动能拦截和空间非合作目标交会。1)目标探测:任务星装载红外探测系统和可见光视频装置等,当目标航天器到达任务范围时,任务星开启星上探测设备,从多个角度方位获取目标相对位置、姿态、工作状态等信息;2)动能拦截:以任务星自身作为整体直接碰撞目标,打击效果显著,通常情况下,目标难以在短时间内采取有效的对抗或防范措施,并且动能拦截方式部署灵活,鲁棒性高,生存能力强,技术相对简单;3)非合作目标交会:通过任务星靠近目标之后利用自身携带的仿生吸附装置与非合作目标进行交会对接,实现在轨卫星故障修复等功能。无论何种任务模式或场景,都需要航天器集群内部分工协作,实现探测,识别,追踪,导航等功能,对集群卫星间通信、信息交互和自主决策能力都提出了较高要求。
空间小卫星集群流程中任务模式采用并行策略,即由任务需求自主决策确定星群任务模式和星群规模,可采取单一模式,亦可采取多种模式按时间先后或同时完成指定任务。
2 集群系统智能指挥与决策
2.1 基于多Agent系统的集群智能指挥与决策
小卫星集群智能指挥与决策主要基于多个Agent系统,从底向上实现Agent间的协同和相互操作,包括协调知识、目标、意图和规划等智能行为[12]。利用多个Agent间的通信构建一个垂Agent体系统,不仅能够克服单个Agent的局限性,而且交互通信可以确保所有Agent获得关键信息,彼此相互依存和相互组织的关系能使该系统灵活地求解复杂问题。
基于多Agent系统的小卫星集群智能指挥与决策总体框架,分为两层结构:上层为决策层,位于“空间基地”,主要功能为环境感知和态势评估,并根据结果进行星群动态协同任务规划,选择任务模式和集群规模。下层为执行层,由多个小卫星个体组成星群小组,主要负责解算执行任务时的小组构型和轨道转移策略,并保持个体之间的信息交互。
集群系统智能指挥与决策主要是根据态势评估函数、目标属性、目标和“空间基地”的状态、上一轮任务效果进行星群动态协同任务规划,确定新一轮任务指令,包括是否进行下一星群小组的释放、星群小组任务模式和规模。下达任务执行指令后,地面站获取到目标星的状态和类型并传送给“空间基地”,“空间基地”需要根据总体任务需求、目标星的类型(遥感、通信、拦截等)、自身状态、目标状态进行决策,确定每个星群小组任务模式与每组卫星数量。当前一组结束任务后,根据指挥星传递回来的任务评估结果,确定下一星群小组的模式与数量。重复以上过程直至完成总体任务要求。流程图如图1所示。

图1 小卫星集群指挥与决策流程图
不同的目标类型决定了任务模式的先后顺序。而且不同的任务模式,后期姿态调整与任务评估也不尽相同。表1给出不同目标对任务规划的不同标准及需求。此外,目标星的大小也将影响集群任务规划中星群小组的规模。
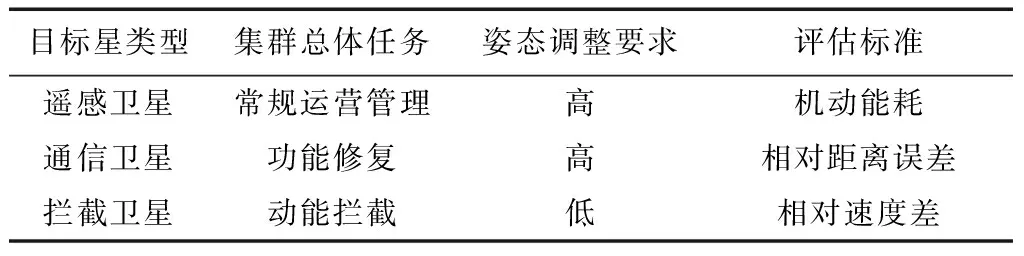
表1 不同目标的标准及需求
2.2 环境感知和态势评估方法
态势评估主要是基于航天器感知的目标、集群和环境信息,评估当前集群所处态势优劣并预测相应的态势发展。这是集群决策系统的核心,对星群小组内单个卫星的配置、规模、类型分配及性能发挥有重要影响。态势评估本质是建立从感知航天器态势信息(包括目标状态、类型、大小,集群状态,“空间基地”状态等)到态势值的复杂映射关系。可以将态势评估函数分为角度优势函数、速度优势函数、轨道高度优势函数、距离优势函数以及效能优势函数,之后根据集群系统性能确定的固有判断条件,以具体数值的方式给出态势评估确定结果[13-14]。
基本的态势评估函数包括:
1)角度优势函数
对于目标探测任务模式,设计角度优势函数κA为:
(1)
其中任务星相对于目标的方位角为φr,星群个体搭载的雷达最大搜索方位角为φR,激光探测最大摆角为φM,不可逃逸圆锥角为φK。对于动能拦截和目标交会模式,无需考虑角度优势函数,默认κA=1。
2)速度优势函数
对于动能拦截模式,相对速度差越大,效果越好,设计速度优势函数κV为:
(2)
其中Vrm为动能拦截最佳速度,Vr为任务星和目标卫星速度差。
对于目标探测和交会,相对速度差接近于0,任务效果最好,设计速度优势函数为:
(3)
3)轨道高度优势函数
由于星群小组中的指挥星负责感知局部态势,并进行决策指挥,因此其相对于目标卫星的轨道高度将决定星群小组任务的优势程度。设计高度优势函数κH为:
(4)
其中hrm为任务最佳轨道高度,hr为指挥星的运行高度。
4)距离优势函数
对于目标探测,设计距离优势函数κD为:
(5)
其中任务星相对于目标的距离为dr,星群个体搭载的雷达最大搜索距离为dR,所携带激光测距仪的最大识别距离为dM,激光最小不可逃逸距离为dKmin,最大不可逃逸距离为dKmax。
对于动能拦截和目标交会模式,设drm为任务最佳距离,设计距离优势函数κD为:
(6)
5)效能优势函数
集群的效能函数由卫星及星上载荷的性能决定,不需进行估计与优化,κE表示效能优势函数。当星群小组满足任务条件时,κE=1,否则为0。
6)整体态势评估函数
整体态势评估函数为均衡不同优势函数κA,κV,κH,κD,κE之间的量级和取值范围的不同,使各个态势值均保持在合理的有限范围,避免态势值差异过大而影响整体评估效果,采用带权重的Sigmoid函数描述。将κA,κV,κH,κD,κE作为Sigmoid函数的自变量输入,可得到参数可调的整体态势评估函数T:
(7)
其中,ωk,βk,k=1, 2, 3, 4, 5为优化权重参数。
3 集群系统构型优化与轨道转移
集群系统任务星星群小组执行任务时,需要进行构型优化和相应的轨道转移与重构。转移过程中,“空间基地”进行大尺度转移迅速接近目标,之后星群小组中指挥星通过脉冲转移轨道,任务星则通过连续有限推力变轨实现任务构型建立。连续有限推力转移基于相对运动模型实现,其目标构型通过优化算法得到,转移路径及转移过程中加速度的设置通过一种基于Jordan分解的连续推力控制重构策略计算得到。
3.1 集群系统分布式转移策略
集群任务中,每个任务星之间姿态、位置、速度等信息与集群中相邻成员进行交互,采用分布式控制方法,不需要获取全部集群成员的信息,减少信息量的同时降低了单颗星上计算机的要求。
获得任务模式和星群规模后,“空间基地”通过改变轨道面以及Lambert转移来缩短“空间基地”与目标星的距离。在确定任务星与“空间基地”的轨道要素后,先在两轨道面交点上用一次脉冲改变轨道平面,对于本身已经共面或者两轨道面相差较小的情况可以跳过这部分。修改完轨道面后,通过Lambert转移缩短“空间基地”与目标星的距离,其中Lambert转移的时间以及圈数通过优化算法得到,在优化中时间约束在适当范围内,以所需总速度改变量为优化目标。当目标星进入“空间基地”任务执行范围内后,“空间基地”进行减速,既避免与目标星距离过近,也减少了指挥星与目标星的速度差。图2给出集群“空间基地”转移部分流程图。

图2 集群“空间基地”转移部分流程图
集群中单个卫星近距离轨道转移采用相对轨道坐标系,以星群群组中的指挥星为中心,实现任务星星群由“空间基地”向目标星的接近。建立由指挥星与N个任务星组成的第j轮星群小组相对运动关系:
(8)


(9)

(10)

3.2 集群任务构型优化
当“空间基地”完成减速后,开始进行集群星群小组构型优化与分布式控制。任务星个数以及任务模式由顶层决策得到。执行任务的构型通过代理模型进行优化[16-17]。图3为所示的集群构型优化与分布式控制流程图。

图3 集群构型优化与分布式控制流程图
对于目标探测、动能拦截和空间非合作目标交会这3种不同的任务模式,在任务构型的优化中,分别设置了不同的目标函数以及约束条件。
(1)目标探测
在任务构型的优化中,约束条件为任务星与目标星的距离能够处于星上设备所及的探测范围内。优化目标考虑3个因素:1)整个重构过程所消耗的推进剂总量最小;2)指向性问题。对于星上设备指向或者激光照射位置有明确要求的目标,安排尽量多的任务星满足这一要求;对于没有要求的卫星,尽量使得任务星在空间上分布较为均匀,尽量从多个方向探测目标;3)由于目标探测需要持续观测,希望在执行任务期间,任务星相对于目标星的角速度尽量较小。
(2)动能拦截
在任务构型的优化中,约束条件为执行时刻任务星能够与目标星发生碰撞,即任务星在任务期间的位置应当都在目标星的体积内。优化目标考虑2个因素:1)碰撞时相对速度尽量较大,才能保证撞击的效果;2)对于不同的任务星,其与目标星碰撞的角度与位置尽量存在一定差异,从而能够将效果最大化。
(3)非合作目标交会
约束条件设置为执行时刻任务星与目标星的相对距离和速度在一定范围内,对于目标交会而言,这里的执行时刻并非直接交会的时刻,而是任务星开始近距离逼近目标的时刻。优化目标考虑2个因素:1)与目标探测相同,希望所消耗的推进剂尽量较少;2)从实现交会的角度考虑,需要使得在执行时刻,目标星与任务星的相对速度尽量较小,从而避免在交会对接中发生碰撞,影响任务效果。
4 集群系统协同控制
在复杂空间环境中,众多集群个体协同配合执行任务,进行有效的协同制导或跟瞄控制,可提高目标探测的准确性和任务效能。
4.1 集群系统协同末制导
空间集群任务中,集群航天器始终运行在轨道空间,与目标之间相对运动状态变化很快,要求其具备高精度制导和控制能力。而集群系统内多个个体对目标进行不同位置、不同角度的观测,需要任务星在时间上具有统一性。因此,在任务执行过程中,采用基于线性二次型调节器(LQR)的控制器,使集群个体执行任务时能够最小化与目标航天器的误差,实现高精度的集群协同末制导。
4.2 集群系统姿态协同控制
目标探测与空间交会具有较高的姿态机动和指向控制精度要求。在轨道转移后,每组任务星围绕在目标星周围,调整姿态以进行末制导。以目标探测为例,期望卫星能调整姿态对准目标星,即本体轴在任务星与目标星的连线上。轨道转移过程中的姿态根据所需推力方向进行调整。经过一定时间的姿态稳定,最终各个卫星的姿态都达到期望值,继而执行任务指令。
5 仿真实例
小卫星集群系统针对单个目标进行空间集群任务规划,“空间基地”初始轨道要素为:轨道半长轴as=7178137m,偏心率es=0,轨道倾角is=30°,升交点赤经Ωs=30°,近地点幅角ωs=0°,纬度幅角Ms=0°。目标初始轨道要素为:轨道半长轴at=7178137m,偏心率et=0,轨道倾角it=35°,升交点赤经Ωt=35°,近地点幅角ωt=0°,纬度幅角Mt=10°。集群任务配置为:集群最大任务轮次为6次,单次最大卫星数20个。目标整星重量1000kg,种类为遥感卫星。
采用本文的方法完成空间环境感知和态势评估,并进行集群任务规划、轨道转移与构型优化,最终实现分布式控制。图4给出“空间基地”与目标星相对轨道(转移段)。此次任务共进行4轮星群释放,每一轮智能决策与指挥结果分别为目标探测(9颗任务星)、目标探测(10颗任务星)、目标交会(10颗任务星)、目标交会(10颗任务星)。任务规划过程中的相对轨道如图5~8所示。

图4 “空间基地”与目标星相对轨道(转移段)
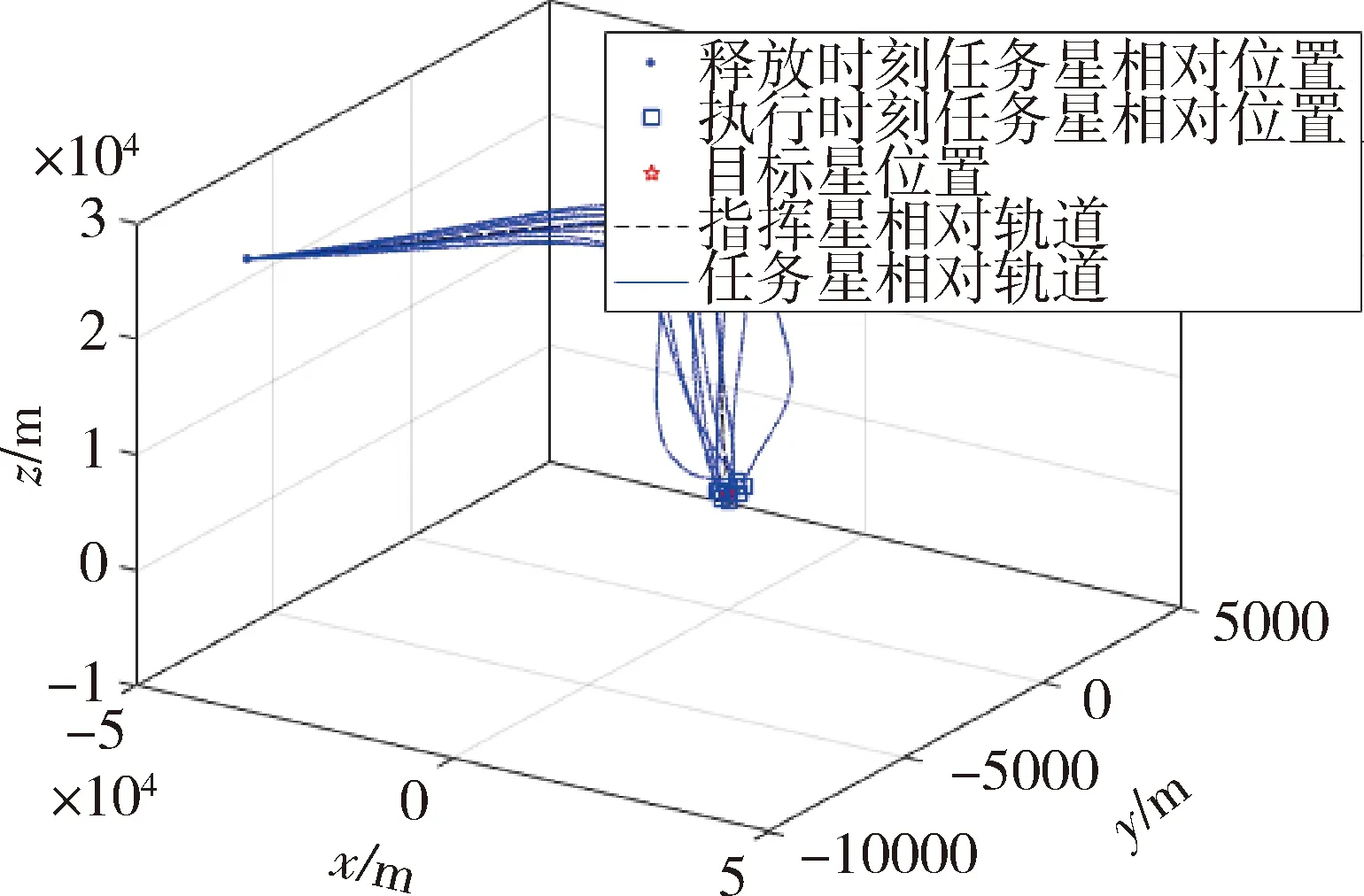
图5 第1次任务轨道(目标探测)

图6 第2次任务轨道(目标探测)

图7 第3次任务轨道(目标交会)

图8 第4次任务轨道(目标交会)
6 结论
针对空间任务复杂的特点,给出小卫星集群自主任务规划方案、任务模式及数量选取策略和集群协同控制方法等关键技术,为小卫星集群系统执行复杂任务技术奠定基础。提出基于多Agent系统的集群智能指挥与训练决策方法,让所有的集群个体围绕共同任务目标,相互协调配合,完成独立个体无法完成的任务。为提高小卫星集群个体配合执行任务时对目标探测的准确性,采用有效的协同制导和跟踪控制,提高集群任务效果。通过对大量航天器进行动力学建模,构建态势环境,设计智能指挥与决策策略,从指挥决策、协同飞行到末端制导进行全过程仿真,实现对小卫星集群真实任务场景的高可信度推演。小卫星集群化设计将有利于提高系统的适应性、稳定性和鲁棒性,为未来开展更大规模集群建设提供技术支撑。
猜你喜欢
农业工程学报(2022年11期)2022-08-22
当代作家(2022年5期)2022-06-06
诗歌月刊(2020年12期)2020-12-23
诗潮(2018年10期)2018-10-17
知识就是力量(2017年2期)2017-01-21
