
多源干扰下运载器精细抗干扰容错姿态控制
2022-09-09 01:50王智慧乔建忠王陈亮
航天控制 2022年4期
滕 昊 王智慧 陈 昌 乔建忠 王陈亮
1.北京航空航天大学自动化科学与电气工程学院,北京 100191 2.北京航天自动控制研究所,北京 100854
0 引言
随着科学技术的飞速发展,运载器执行的任务更加复杂多样,控制难度逐渐增加,尤其是运载器的姿态控制。对于运载器姿态控制,现有许多基础控制技术已被广泛应用,如滑模控制[1]、自适应控制[2]、鲁棒控制[3]以及智能控制[4]等。另外,基于干扰观测器的控制方法[5-7],因其能够有效处理干扰问题,也已经越来越多地应用到运载器姿态控制之中。
运载器执行一般任务包含主动段、姿态调整段、平飞段、再入段以及水平着陆段等飞行阶段。以再入飞行段为例,运载器需要从高空下降,在这一阶段,运载器的高度、速度以及姿态角变化非常复杂。且由于运载器本身的机械结构特性,在高速飞行时会产生较强的弹性振动影响,外部环境干扰也严重影响运载器的飞行方向,同时运载器的姿态控制系统也存在模型不确定性等[8-9],这些多源异质干扰给运载器姿态控制带来了巨大的挑战。运载器姿态控制系统固有的强耦合、强非线性、多通道不确定性的特征,进一步增加了控制的难度。为了有效处理干扰,可利用PID、滑模等算法本身的鲁棒性对干扰进行抑制,如文献[10]提出了自适应高阶超螺旋控制算法,能够有效提高响应速度,增强鲁棒性,还能够抑制抖振。另外,基于观测器的控制方法,可以有效对干扰进行估计,然后通过控制器设计进行补偿或抑制等。这些方法已经取得了较好的应用,但是运载器在实际飞行过程中,受到的干扰是多源、异质甚至是异构的,将干扰作为“单一”项进行处理,牺牲了控制精度。所以,对于多源干扰的研究,现已越来越成为热点问题。
另一方面,运载器在这一阶段飞行范围大,环境恶劣多变,且跨越从高速到低速,高空到低空的剧烈变化过程,受到高动压、高加热率等因素的影响,导致执行机构在飞行过程中容易出现效能下降、漂移等故障,并与干扰项耦合,严重影响运载器姿态控制系统安全性与稳定性。针对故障问题,文献[11]在考虑了未知方向故障、模型不确定性以及外部环境干扰的情况下,设计了一种神经网络容错控制,通过神经网络保证了故障状态下的控制精度,提高了系统鲁棒性;文献[12]针对运载器执行机构效能下降的情况,设计了模糊控制规则使得气动舵面与RCS相互配合补充效能降低的力矩损失,保证了故障情况下的控制精度与稳定性;还可利用迭代学习观测器估计驱动效率,然后重构控制器对效能进行补偿[13]等方法,均达到了一定的效果,然而运载器在再入段受到故障与干扰的同时作用,具有强耦合的特征,要保证运载器的稳定性与精确性,为控制系统设计提出了更高的要求,增加了问题的复杂性与难度。
因此,针对运载器在再入飞行阶段的姿态控制问题,考虑执行机构故障,同时考虑运载器在飞行过程中受到来自内部弹性振动干扰、外部环境干扰以及模型不确定、参数摄动等多源干扰的影响,为提高运载器的抗干扰容错能力,并保证控制精度,我们基于复合分层抗干扰控制框架,结合强抗扰控制理论[14-15],提出一种精细化抗干扰容错姿态控制方法(Refined anti-disturbance fault-tolerant control,RADFTC),设计控制系统框图如图1。
如图1所示,建立包含故障与多源干扰的姿态控制模型,并进行数学变换与合并;针对运动学中的非匹配模型不确定及其特性设计干扰观测器进行估计;针对来自内部的弹性振动干扰,利用部分已知信息对干扰建模,通过干扰观测器进行估计;针对执行机构退化、漂移故障以及外部环境干扰、参数摄动,利用扩张状态观测器进行估计;最后基于动态面控制,设计具有干扰补偿的抗干扰容错控制律,保证运载器飞行的安全性、稳定性与精确性。
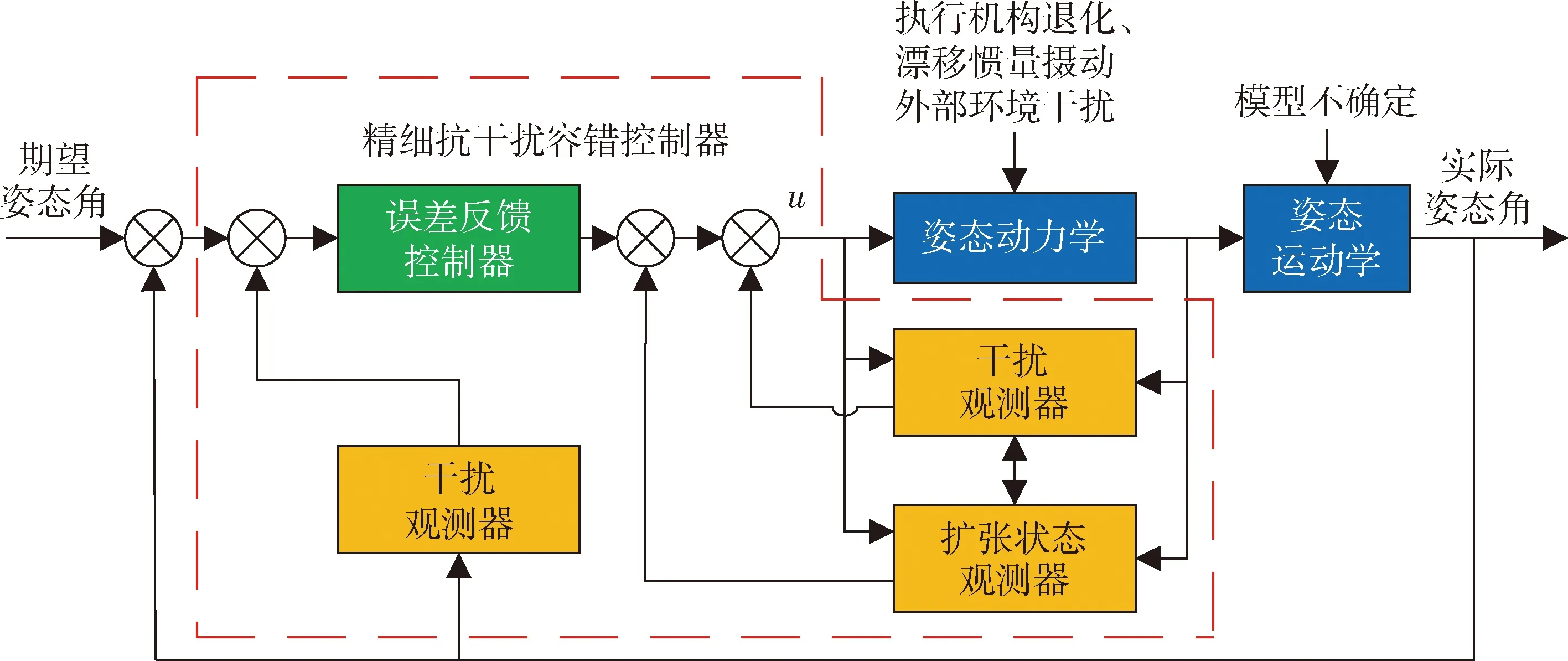
图1 精细抗干扰容错姿态控制框图
1 问题描述
为准确描述运载器在再入段的飞行姿态,选取攻角α、侧滑角β以及倾斜角σ表示运载器的姿态角,平动方程、标称运动学与动力学方程可见文献[1]和[16]所示。根据运载器在再入飞行阶段的飞行特性做如下假设:
假设1:忽略运载器的经度变化率。
假设2:地球自转角速度约为0.00007272(rad/s),可忽略。
考虑执行机构退化与漂移故障、模型不确定、参数摄动、弹性振动干扰、外部环境干扰等,建立模型如下:
(1)
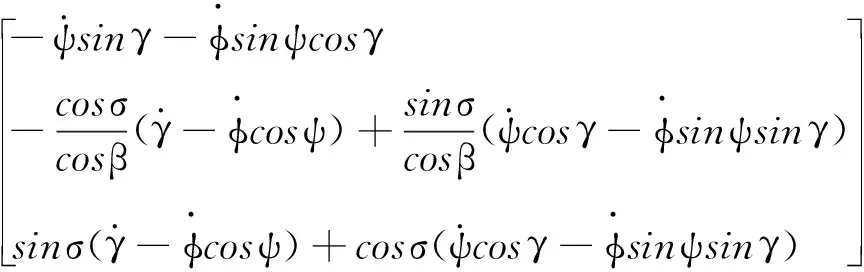
式中,Ω=[α,β,σ]T表示姿态角向量;R表示旋转矩阵,具体可表达为:

(2)
ω∈3表示三轴角速度;u∈3表示控制输入力矩,f∈3表示退化或漂移引起的故障;J∈3×3表示转动惯量,可表示为:
(3)
ΔM表示模型不确定项,具体表达如下;
(4)

(5)


则dv可表示为如下模型形式:

(6)

令d2=J-1dv,则

(7)
式中,S=J-1Sv为已知系数矩阵。

基于上述分析,式(1)可重写为:

(8)
2 精细抗干扰容错姿态控制系统设计
2.1 观测器设计
针对运载器再入段运动学中的d1,故构造如下干扰观测器:
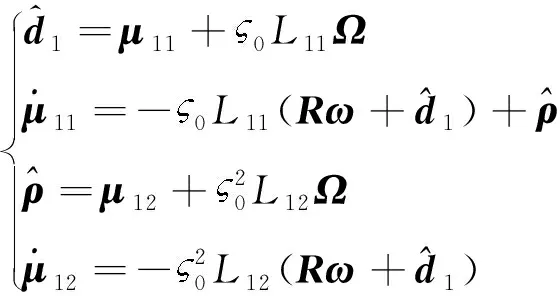
(9)


(10)
且有
(11)
(12)

(13)

定义V0=εTHε,对V0求导可得:
(14)
式中,根据Young不等式以及ζ0≥1性质,有
所以式(14)可进一步写为:
(15)

(16)
另外,基于弹性振动干扰d2模型(7),我们构造如下干扰观测器:
(17)


(18)
针对执行机构故障等不可建模干扰项d3,构造如下扩张状态观测器:
(19)
式中,L31和L32为大于0的观测器增益。

(20)
以及
(21)

(22)

结合式(18)和(22),可以看出DO与ESO相互耦合,联立可得:
(23)
式中,B4=[0I]。
基于此,我们给出如下引理:
引理1:对于式(23),若存在正定对称矩阵P=PT>0以及Q=QT>0使得如下线性矩阵不等式成立:
(24)



(25)
根据Young不等式,
(26)

(27)
式中,

(28)

(29)
由Schur补引理Ξ2<0与Ξ0<0等价。证毕。
2.2 控制器设计
定义z1=Ω-Ωd,则
(30)

(31)
根据Young不等式,
(32)
代入式(31),可得
(33)
设计虚拟控制信号ωd动态补偿非匹配项d1:
(34)
式中,c1>0表示待设计控制参数;lY>0为一常数。

(35)
为避免强非线性求导问题,令ωd通过时间常数为τ的一阶低通滤波器
(36)

定义z2=ω-w,Y=w-ωd则
(37)
(38)


(39)
根据Young不等式,



(40)
(41)
(42)
式中,b1和b2为大于0的常数。
连续函数η在Θ1×Θ2上有范数最大值,记为M,且对于任意大于0的常数lη,有
(43)
进而可得
(44)
设计RADFTC控制律为:

(45)
所以
(46)
2.3 稳定性分析
我们给出如下定理:

证明:

(47)

此外,
(48)
3 仿真验证
以一质量为6165kg的运载器在初始高度为25000m的大气层再入下降为例进行仿真验证,转动惯量矩阵J由文献[1]给出:
初始姿态角Ω(0)=[19.5°,1.05°,-0.98°]Τ,初始角速度ω(0)=[0,0,0]Τrad/s。
弹性振动引起的干扰d2设为:
(49)
其中,d2中的振动频率ωv=2为已知量。
外部环境等其他干扰设置为:
(50)
设故障表达式为:
L11=40.9805,L12=47.0033

控制参数选取c1=0.1,c2=20.1919。目标姿态角设为Ωd=[15°,0°,0°]Τ。仿真结果如图2~7所示。
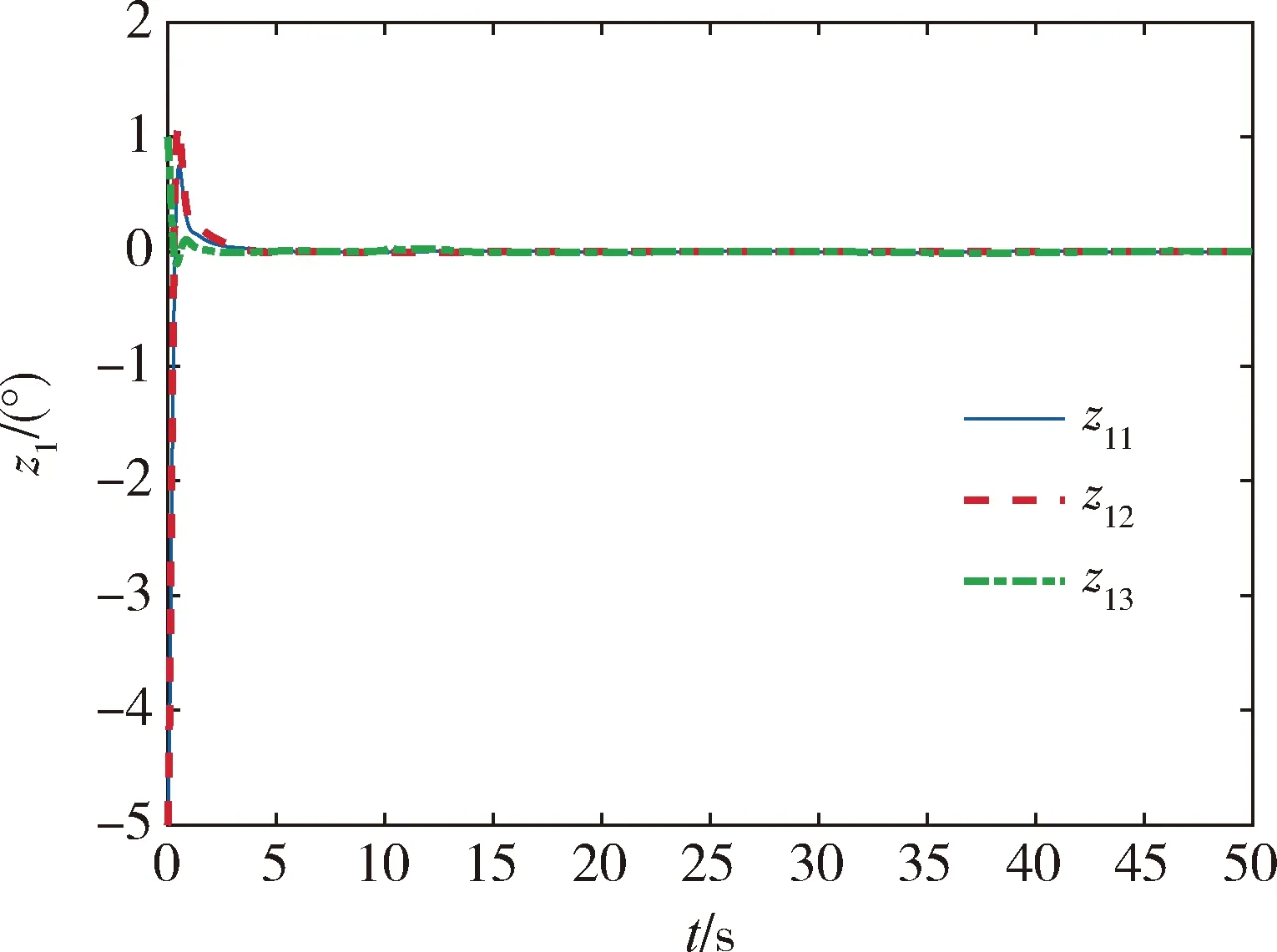
图2 三轴姿态角跟踪误差z1
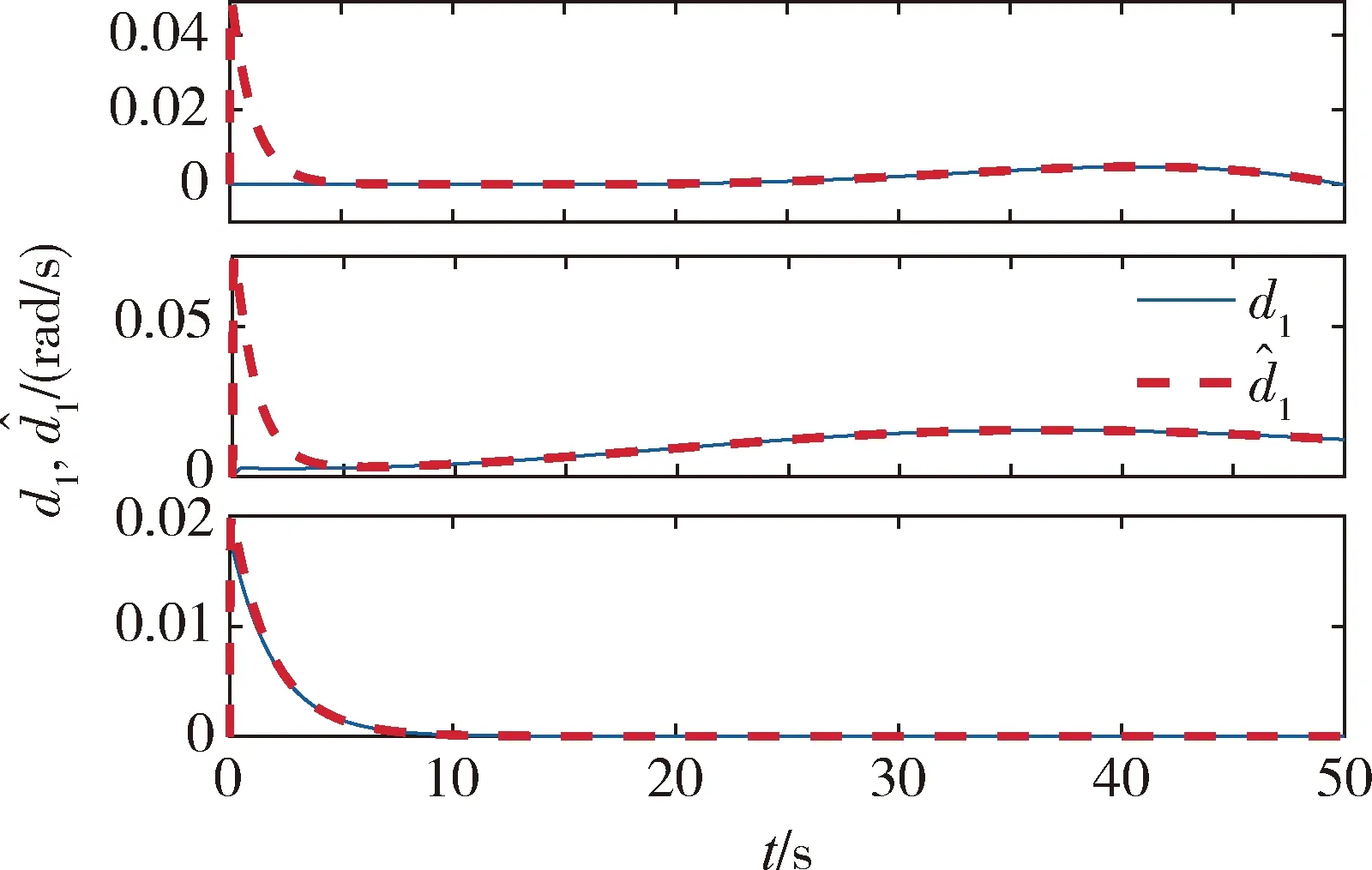
图3 d1的估计效果

图4 弹性模态振动干扰d2估计效果

图5 d3估计效果

图6 执行机构输出力矩

图7 仿真效果对比图
根据仿真结果,可以观察出,所设计的控制方法可使运载器的姿态跟踪误差在5s左右收敛至较小的有限集内。在10s后存在漂移以及退化故障且受到弹性振动以及外部环境等干扰的影响时,系统仍然能够保证收敛性,具有较高的鲁棒性与控制精度。
针对非匹配的模型不确定d1所设计的干扰观测器式(9)在4s左右能跟踪上设定的干扰信号;针对弹性模态振动干扰d2设计的干扰观测器(17)也可以在3s左右跟踪上真实值,即使在10s、30s出现故障时,也能够快速跟踪上实际信号;针对故障信号以及外部环境等集总干扰d3所设计的扩张状态观测器式(19)同样能够保证跟踪的准确性,即使在故障出现时,也能够保证在较短的时间内跟踪上真实信号。从而验证了所设计观测器的有效性与可靠性。
最后与自抗扰控制(ADRC)方法进行对比,ADRC观测器与控制器设计分别如下:

(52)
(53)
式中,x=[Ω,ω]Τ,f(x)=[Rω,-J-1ω×Jω]Τ,B=[03,I3]Τ,d=[d1,d2+d3]Τ。通过极点配置法设置观测器参数K1=90,K2=2700。同时保证与所设计精细化抗干扰容错控制(RADFTC)方法姿态的上升时间相同,取控制增益为K3=100.32,K2=19.99。
跟踪误差的仿真结果可以看出,自抗扰控制方法在同等条件下的控制精度相对较差,且存在波动,而RADFTC方法,可以快速达到期望值,且跟踪精度较高,平滑性与稳定性较好。
综上,所设计的RADFTC方法在干扰、故障同时存在的复杂情况下,仍可以保证运载器姿态跟踪的精度,具有高精度、强鲁棒性等特征。
4 结论
针对运载器在再入飞行段存在故障与多源干扰情况下的姿态控制问题,基于复合分层抗干扰控制理论,设计了一种干扰观测器,准确估计运动学中的模型不确定。设计了干扰观测器准确估计弹性模态振动干扰,设计了扩张状态观测器,准确估计故障以及集总干扰。基于动态面控制,对非匹配的模型不确定项设计虚拟控制信号进行动态补偿,对故障与多源干扰设计了精细抗干扰容错姿态控制器进行补偿。通过仿真可以看出,所设计控制器在故障、多源干扰同时存在的情况下,仍能够保证姿态的高精度跟踪,具有较强的抗干扰与容错能力。
猜你喜欢
军事文摘·科学少年(2021年9期)2021-10-13
科技研究·理论版(2021年20期)2021-04-20
中国化妆品(2017年12期)2017-06-27
中小企业管理与科技·下旬刊(2016年12期)2017-01-17
新教育时代·教师版(2016年29期)2016-12-05
商界评论(2016年11期)2016-12-01
价值工程(2016年30期)2016-11-24
商(2016年21期)2016-07-06
Coco薇(2016年2期)2016-03-22
网球俱乐部(2009年13期)2009-11-23
