基于空间闭链连杆机构的可折展手爪设计
2022-09-05 08:47:42刘佳莉杜静恩刘凌霄
轻工机械 2022年4期
徐 蕊, 许 勇, 刘佳莉, 杜静恩, 刘凌霄, 王 艳
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
传统的机器人手爪作为机器人的末端执行器,多为刚性连接,不仅结构复杂、实现困难、造价较高,而且存在对定位偏差敏感、易损坏目标物等问题[1-2]。因此,近年柔性、可大范围折叠/展开的新型手爪逐渐走向研究的前沿。
柔性手爪可以与机械臂、水下机器人、无人机和人体等配合实现抓取任务[3-5],主要具有抓持功能为主兼具位姿变换功能,为满足多元化作业需求柔性手爪机器人还集成了传感[6-7]、自愈[8]和变刚度[9-11]等功能。JANG等[12-13]提出了可在磁场内自由运动抓取的微型软夹持器。德国Festo公司推出的Free-Motion Handling软体抓持机器人区别于软体末端与运动机器人的简单机械联接,将自身抓持结构特点与运动功能巧妙融合。Lee所在的团队[14-17]基于折纸扭转塔结构设计了一种3指机械手,通过金属丝驱动手臂和各个手指实现较大范围的弯曲、伸缩,该机械手可顺利完成羽毛球、蛋壳等轻薄而易损坏物品的抓取。Suk-Jun Kim等[18]提出了一种集成于无人机平台的绳驱动轻型可折叠机械臂,其中的自锁/解锁装置使折叠臂具有刚度较大且可调的优点,可实现无人机在水底、树林等视野不佳或狭窄受限环境中的侦测和操作应用。
通常多关节手指和手爪具有多个自由度和驱动副,且运动范围有限。课题组基于Bricard空间闭链连杆机构设计出一种新型的可折展手爪,其优势在于:整个手爪只有1个自由度,无奇异位型,易于驱动和控制;折展范围和工作空间较大;由于其有可折展性,该手爪可抓取不同形状、大小、材质的物品(包括柔软易损物品)。课题组提出了可折展3指手爪的单关节驱动机构、多关节手指驱动机构和单自由度同步驱动副,可同步控制3根多关节手指同步开合、抓取目标物体。可折展手爪的样机实验表明了课题组提出的可折展手爪机构设计的合理性和抓取方案的可行性。
1 基于Bricard机构的可折展手爪驱动机构设计
为方便快速地折叠和展开手爪,课题组基于面对称Bricard空间闭链连杆机构,分别设计了单关节、3关节可折展手指及3指可折展手爪的驱动机构,使得只需1个驱动即可实现整个可折展手爪的开合运动。
图1所示为课题组提出的可折展手爪由正多边形手掌和3根对称布置的可折展手指构成,每根手指含有3个轴线平行的转动关节,其中虚线表示关节轴线。

图1 可折展手爪示意图Figure 1 Foldable gripper diagram
1.1 基于Bricard机构的单关节驱动机构方案
课题组选择具有较好折展特性和运动对称性的面对称Bricard机构[19]作为可折展手爪中的单关节驱动机构,如图2(a)所示,分别以转动关节形心A,B,C,D,E,F为原点建立各连杆坐标系,以各关节轴线方向为zi轴,以沿着杆i且方向从zi-1轴指向zi轴为xi轴,yi方向由右手法则确定,其中i为杆的编号。图中杆6为机架(手掌),θ6为机构的驱动副转角,θ1即为可折展手指中单个指关节的转角。

图2 基于面对称Bricard机构的可折展手指单关节驱动机构Figure 2 Foldable finger single joint drive mechanism based on plane-symmetric Bricard mechanism
1.2 基于组合Bricard机构的多关节可折展手指驱动机构设计
多关节手指可对尺度较大的目标进行包络和抓取。课题组将多个Bricard单关节驱动机构进行串联组合,得到多关节手指的驱动机构如图3所示。3个面对称Bricard机构A1B1C1D1E1F1,A2B2C2D2E2F2和A3B3C3D3E3F3串联组合需满足如下条件:①转动副B1,B2轴线重合;②转动副C1,C2轴线平行;③杆件B1C1,B2C2刚化为一体;④转动副F2,F3轴线重合;⑤转动副E2,E3轴线平行;⑥杆件F2A2,F3A3刚化为一体。

图3 单关节驱动机构串联而成的3关节可折展手指驱动机构Figure 3 Three-joint foldable finger drive mechanism formed by single joint drive mechanism connected in series
图3中,杆件F1A1为手指驱动机构的机架(即手掌),转动副F1为驱动副且始终垂直于手掌平面。3个Bricard单关节驱动机构串联组合,可实现3关节可折展手指的折叠和展开。3关节可折展手指运动状态如图4所示。
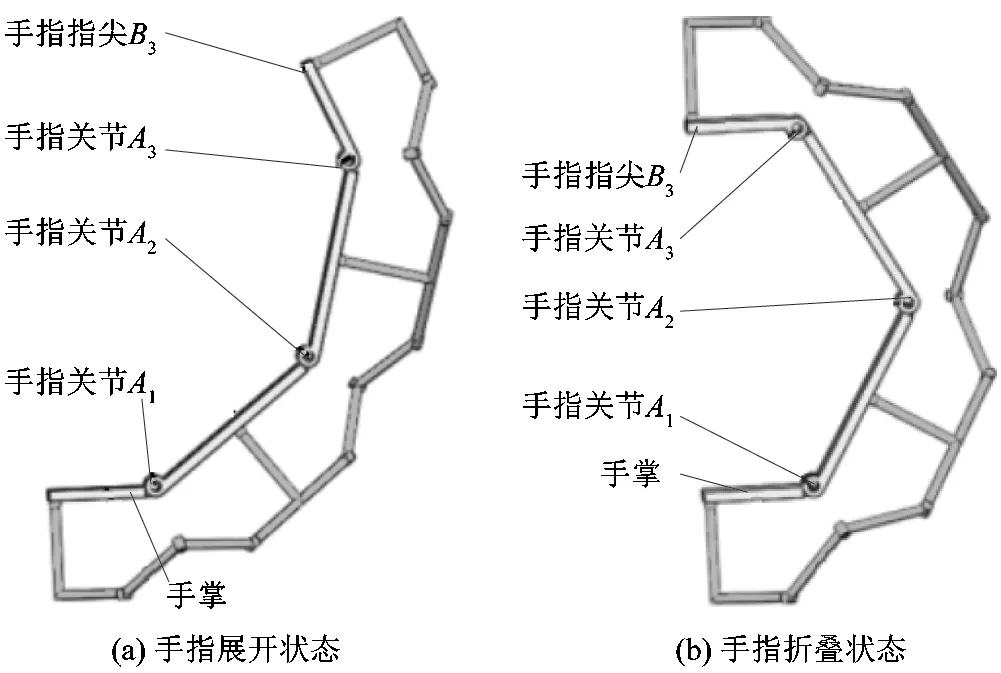
图4 3关节可折展手指运动状态Figure 4 Three-joint foldable finger motion state
1.3 基于组合Bricard机构的3指可折展手爪驱动机构设计
要想实现3根对称布置的可折展手指的同步开闭,需要设计多根手指的单自由度同步驱动副。图5(a)所示为正六边形手掌。图5(b)所示为多根手指的同步驱动副,同步驱动副的竖直杆与手掌的中心孔装配形成转动副,同步驱动副上方的3个水平轴分别与每个手指驱动机构的E1轴同轴装配,从而实现3个手指驱动机构同步运动和3根手指同步折展。

图5 可折展手爪的驱动机构Figure 5 Drive mechanism of foldable gripper
图6所示为可折展手爪抓取过程示意图。可以看出,在每个单关节驱动机构、每个多关节手指驱动机构和多手指同步驱动副均为单自由度(下文将论述)的情况下,通过单自由度驱动,来实现每个关节的弯曲,每根手指的折叠,3根手指对目标物体的同步包络、抓取。即只需1个单自由度同步驱动副,可折展手爪中的3根单自由度手指可实现同步驱动,全部手指关节可实现同步开合、抓取动作。

图6 可折展手爪抓取过程Figure 6 Foldable gripper grasping process
2 可折展手爪驱动机构运动建模
笔者基于螺旋理论计算多关节可折展手指驱动机构的自由度,并对可折展手指进行运动学建模,以求解可折展手指中折叠角与驱动角间的量化关系,及可折展手爪的末端轨迹。
2.1 多关节可折展手指驱动机构的自由度分析
由G-K公式可得面对称的Bricard机构自由度为1[20]。基于螺旋理论和动态闭合法[21],对多关节可折展手指进行自由度计算。机构中的过约束都是在运动链闭合时发生,最基本的方式就是开链闭合成单闭环机构,而单闭环的过约束即是其公共约束。
课题组将多个Bricard机构进行拓展得到多关节手指驱动机构。图7所示为由2个Bricard机构拓展连接后得到的双关节手指驱动机构:此时转动副A1,A2轴线始终平行,转动副B1,B2轴线重合,转动副C1,C2轴线始终平行,杆A1B1,A2B2始终共线,杆B1C1,B2C2刚化为同一杆件B1(B2)-C1C2。该双关节手指驱动机构可以看作以杆件B1(B2)-C1C2为机架,将开链C2D2E2F2A2连接在单关节手指驱动机构C1D1E1F1A1B1(B2)的右端A2和C2点,且所连接的2点A2和C2都是连续运动的点,该连接方法即为 “动态闭合”法。

图7 2个单关节驱动机构组合的动态闭合法Figure 7 Dynamic closing method with two single joint drive mechanism combinations
建立坐标系O-XYZ如图7(b)所示,选取杆件C1C2的中点位置为坐标原点O,杆件A1A2方向为X轴正方向,OB1(B2)轴线方向为Y轴正方向,Z轴正方向根据右手法则确定。选取杆件B1(B2)-C1C2为机架,杆E1F1为输出杆件,则输出构件通过2条支链与机架相连接,转动副E1、D1、C1及中间所连各杆构成支链1,转动副F1,A1,B1及中间所连各杆构成支链2。
由图7可知,支链1的运动螺旋为:
(1)
式中:a1,c1分别是转动副C1的轴线与定坐标系X轴和Z轴方向的余弦;e1为转动副C1的轴线对定坐标系Y轴的线矩;d2为转动副D1的轴线对定坐标系X轴的线矩;f2为转动副D1的轴线对定坐标系Z轴的线矩。
则由螺旋互易原理可得支链1的约束螺旋为:
(2)
式(2)中3个约束螺旋表示分别平行于X轴、Y轴和Z轴的约束力线矢。
由图7,支链2的运动螺旋为:
(3)
由螺旋互易原理可得支链2的约束螺旋为:
(4)
式(4)中3个约束螺旋表示分别沿Y轴和Z轴方向的约束力线矢和沿X方向的约束力偶。
由图7可知开链C2D2E2F2A2的运动螺旋为:
(5)
由式(5)可知其约束螺旋为:
(6)

M=6(n-g-1)+∑fi+μ=6(10-11-1)+11+2=1。
(7)
式中:n为机构的构件数,g为机构的运动副数,fi为第i个运动副的自由度数,μ为机构中的冗余约束数。
图8所示是将3个Bricard单关节驱动机构串联,得到3关节手指驱动机构。此时转动副A3和A2轴线始终平行,转动副F3和F2轴线重合,转动副E3和E2轴线始终平行,杆A2F2和A3F3始终共线,杆E2F2和E3F3刚化为同一杆件E2(F2)-E3F3。运用动态闭合法,此时可认为将开链A3B3C3D3E3连接在双关节闭链的右端2点A3和E3,且所连接的2点A3和E3都在运动之中。开链与双关节闭链的闭合约束数为1。整个3闭环过约束个数为3,故3关节手指驱动机构的自由度为:
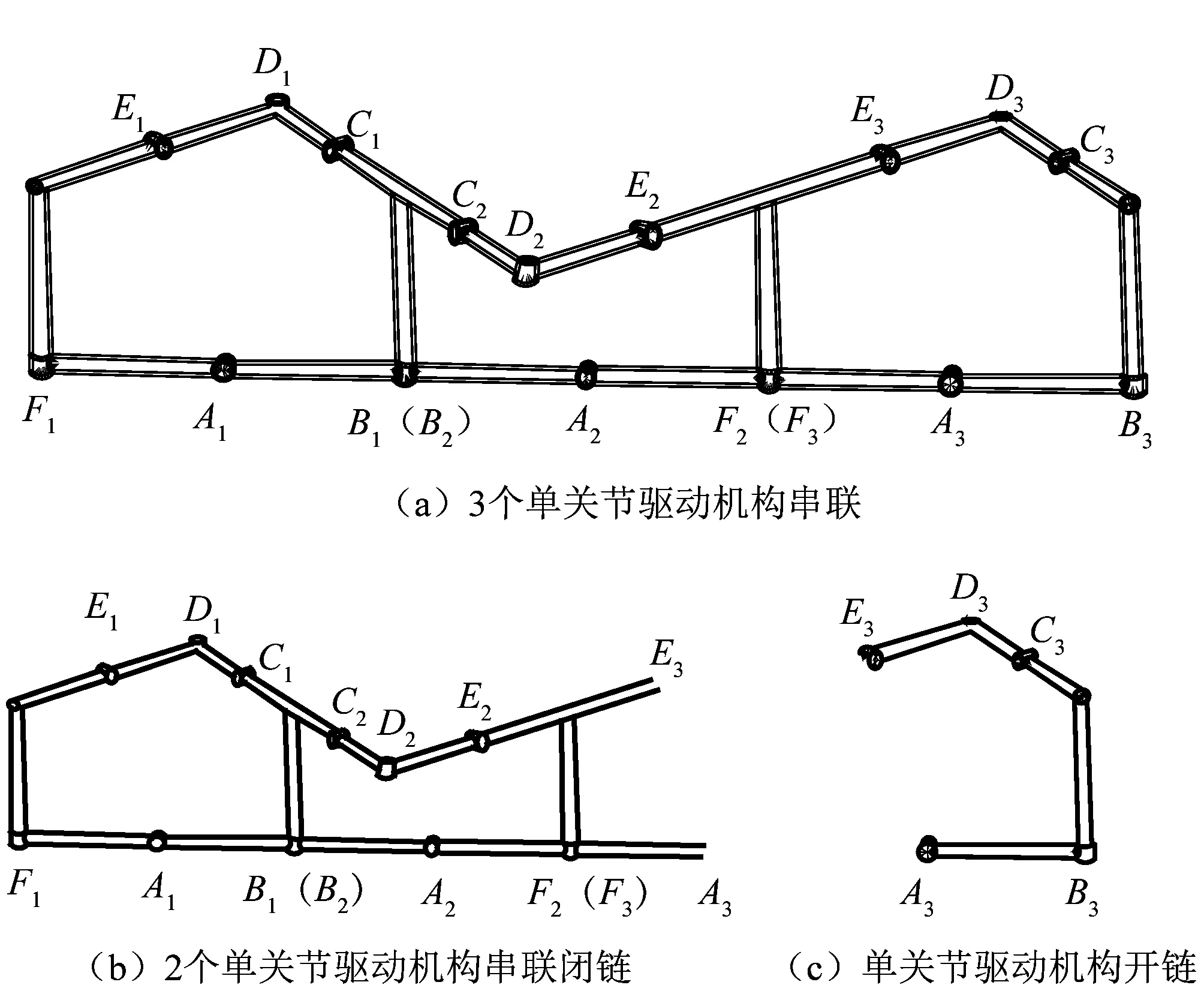
图8 3个单关节驱动机构组合的动态闭合法Figure 8 Dynamic closing method with three single joint drive mechanism combinations
M=6(n-g-1)+∑fi+μ=6(14-16-1)+16+3=1。
(8)
由上述结果可以总结出:m个单关节驱动机构串联组合后,整个机构的闭环约束数为1,整个机构的过约束数为m,构件数为4m+2,转动副个数为5m+1。因而,多关节手指驱动机构的自由度为:
M=6(n-g-1)+∑fi+μ=1。
(9)
综上所述,无论将多少个单关节驱动机构按照动态闭合法组合,组合机构的自由度恒为1。
课题组设计的3关节可折展手指驱动机构的自由度为1,选取转动副F1为驱动副。通过课题组设计的可折展手爪同步驱动副,可驱动3个可折展手指同步折展。
2.2 多关节可折展手指驱动机构的关节转角求解
如前所述,面对称Bricard机构具有折展特性,单关节Bricard驱动机构可以通过共用相邻构件或关节的方式,组合成多关节可折展手指的驱动机构。图9所示为3关节可折展手指的驱动机构:杆A1F1为机架(手掌),转动副A1,A2,A3为可折展手指的3个指关节。课题组给出该机构的D-H参数如表1所示。表1中:当i>6时,i用1代替;a(i-1)i为关节i-1和关节i轴线间的公垂线长度(杆长);α(i-1)i为关节i-1和关节i轴线间的夹角;θ(i-1)i为连杆i-1和连杆i绕同一关节i轴线的转角;Ri为连杆i-1和连杆i在关节i轴线上的偏置距离。

表1 3关节可折展手指驱动机构的D-H参数
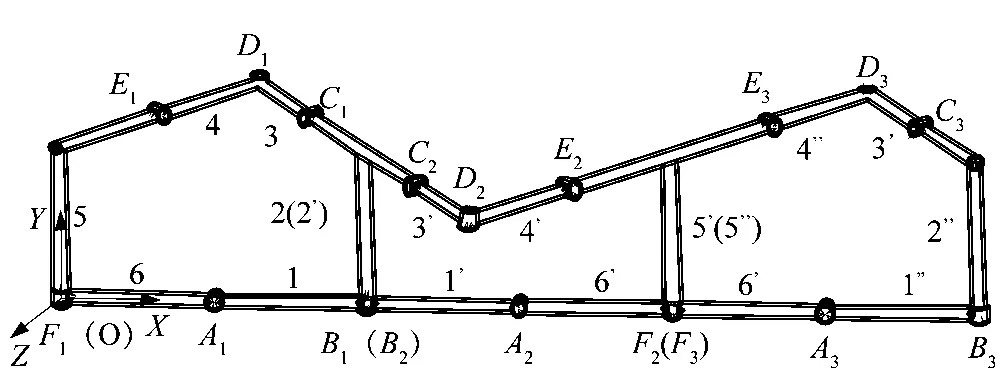
图9 3关节可折展手指驱动机构Figure 9 Three-joint foldable finger drive mechanism
在单闭链机构中,连杆间的位姿矩阵依次相乘,其结果为单位矩阵,在多闭链机构的每个闭链中亦如此。因而,图9中3关节手指驱动机构的闭环位置方程可表达为:
(10)
式中:T12表示连杆2相对于连杆1的位置、姿态变换矩阵,其余矩阵依此类推。
由图9中多闭链机构的连接关系可知:
(11)
由于3关节手指驱动机构的自由度为1,所以机构只需要1个驱动副。当杆件长度a=b=r时,选取杆件A1F1为机构的机架、关节转角θ6为驱动副。则根据面对称Bricard机构的几何装配关系和式(10)、式(11)可以求得:

(12)
2.3 多关节可折展手指驱动机构的末端轨迹求解
由式(12)可知,多根可折展手指驱动机构是对称连接的且其自由度均为1,各Bricard手指关节驱动机构的对应输入、输出转角应分别相等,即前一Bricard驱动机构的输出作为后一Bricard驱动机构的输入,此时转动副A1,A2和A3应同步转动。
如图9所示,建立固定坐标系O-XYZ,以转动副F1的形心处为原点O,以杆件F1A1方向为X轴正方向,以转动副F1的轴线方向为Y轴正方向,Z轴正方向由右手定则确定。在各转动副形心处建立参考坐标系Oi-XiYiZi,所研究点在各参考坐标系下的坐标为[0,0,0]。构件i和构件i+1之间的变换矩阵为公式:
(13)
将表1中的值代入到公式(13)中,即可以得到各相邻杆件间的变换矩阵、各杆在固定坐标系中的姿态,以及各转动副形心Ai,Bi,Ci,Di,Ei,Fi(i=1,2,3)在固定坐标系中的位置坐标。
图10 3关节可折展手指中转动副形心变化轨迹Figure 10 Three-joint foldable finger trajectory of rotation of hypocentroid in finger
3 可折展手爪样机实验
课题组对可折展手爪样机的零部件进行了3D打印和装配,打印材料为PLA(聚乳酸),打印精度为0.1 mm,转动副间采用螺栓连接。可折展手爪样机的尺寸参数为:a=51 mm,b=47 mm,各杆厚度c=3 mm,连杆2和5下段(直立段)长度d=69 mm,r=72 mm(r=d+c)。
如图11所示,该手爪由3个可折展手指构成,每个可折展手指通过3个Bricard手指关节驱动机构串联而成,手掌部分与同步驱动副连接。在同步驱动副的单自由度转动作用下,可折展手爪中的全部手指可实现同步开合、抓取作业。

图11 可折展手爪原理样机Figure 11 Foldable gripper prototype claw principle
为验证可折展手爪驱动机构的运动原理和手爪的抓取可行性,课题组使用可折展手爪进行了实物抓取实验。实验中采用的抓取模式为包络抓取模式,被抓取对象为球形物体,未考虑摩擦力的影响。抓取实验的主要过程如图12所示,实验结果证实单自由度驱动可实现可折展手爪的展开与闭合,包络抓取的稳定性较高。

图12 可折展手爪抓取实验Figure 12 Foldable gripper grasping experiment
4 结语
课题组提出了一种可折展末端执行器——基于空间闭链连杆机构的可折展手爪,主要研究内容及结论如下:
1) 完成了可折展手爪驱动机构的构型设计。设计了单自由度关节驱动机构、单自由度多关节手指驱动机构、单自由度3指手爪驱动机构,只需1个驱动关节,即可实现可折展手爪中全部手指的同步开合、抓取运动,有效简化了手爪的结构设计和控制系统。
2) 完成了可折展手爪驱动机构的运动学建模。求得了手指驱动机构的驱动角与折叠角间的量化关系,以及各手指指节关键点的运动轨迹,为抓取稳定性分析奠定了基础。
3) 完成了可折展手爪的样机制作及抓取实验,测试结果表明该手爪完全能够满足不同大小和形状物品的包络抓取任务。
猜你喜欢
四川建筑(2021年1期)2021-03-31 01:01:46
装备制造技术(2020年11期)2021-01-26 00:39:14
建筑机械化(2020年7期)2020-08-15 06:41:32
电子制作(2018年24期)2019-01-03 02:30:30
荣誉杂志(2017年7期)2017-08-23 08:05:59
水利科技与经济(2017年10期)2017-04-25 00:21:00
科技创新与品牌(2016年8期)2016-09-29 22:25:52
工程建设与设计(2016年1期)2016-02-27 10:50:15
少儿美术·书法版(2016年12期)2016-02-06 01:00:54
机械工程师(2014年12期)2014-12-23 06:44:04