叠加Ⅱ级杆组的正铲液压挖掘机工作机构型综合
2022-09-03 01:47刘文兰于海霞瞿怀宇马鹏飞高小钧王建森
中国机械工程 2022年16期
刘文兰 于海霞 瞿怀宇 马鹏飞 高小钧 王建森
1.兰州理工大学能源与动力工程学院,兰州,7300502.兰州信息科技学院材料与化工工程学院,兰州,730300
0 引言
随着我国经济建设的迅猛发展,对重大工程技术装备的需求越来越大,正铲液压挖掘机作为工程机械中重大装备的一种,在面对复杂地质、恶劣工况时优势突出,尤其在大型露天矿山开采、水利建设、国防建设等工程中发挥重要作用。因国外知识产权的垄断以及国内核心技术尚不成熟,目前市场上正铲液压挖掘机产品比较单一,其工作机构主要有经典的10杆构型和带有“强力三角”结构的12杆构型。
工作机构是正铲液压挖掘机完成各种作业任务最重要的机械本体,其创新设计和性能的研究在整机性能的提升方面具有不可磨灭的作用,因此,工作机构是目前正铲液压挖掘机的研究热点之一。祖琪等[1]基于平面12杆3自由度运动链拓扑图库提出了一种正铲液压挖掘机的工作机构,并基于运动链环路理论进行了运动学分析。DING等[2]提出了一种可有效增大铲斗液压缸推力和行程的正铲液压挖掘装载机构,并对其运动学特性和动力学性能进行了分析。蔡敢为等[3]提出了一种双摇臂14杆正铲液压挖掘机的工作机构,并对其运动学和动力学性能进行了研究。FRIMPONG等[4]基于牛顿-欧拉法建立了一种正铲液压挖掘机工作机构的动力学模型。SHE等[5]基于Adams软件分析了铰接点位置对正铲液压挖掘机工作机构运动学性能的影响并进行了优化设计。徐弓岳等[6]基于动态拥挤排序策略、差分算子和随机变异算子提出了一种改进的非支配排序遗传算法,对一种10杆构型的正铲挖掘机工作机构进行了优化设计。宁晓斌等[7]以一种正铲液压挖掘机的斗杆结构强度为基准,基于有限元对斗杆结构进行了拓扑优化设计。朱小晶等[8-9]联合Adams和AMESim软件对一种斗容为15 m3的正铲液压挖掘机工作机构的工作特性进行了仿真研究。王永进等[10-11]基于Adams和AMESim软件对动臂和斗杆液压缸在工作周期内的压力、速度、位移、斗杆升降回路特性等进行了仿真分析和试验研究。周全等[12]基于离散元技术研究了正铲液压挖掘机的动态挖掘阻力,进而分析了工作机构的结构强度。陈进等[13]提出了正铲液压挖掘机挖掘性能的图谱叠加分析法,将不同工况下的多张挖掘图叠加在一张图谱上,更全面反映挖掘机的挖掘性能,并编制了相关软件。上述文献通过优化改进已有产品结构或其他创新思想分别提出了正铲液压挖掘机的工作机构构型,但未涉及正铲液压挖掘机工作机构型综合问题。
正铲液压挖掘机的工作机构属于平面机构。在平面机构型综合方面,HUANG等[14-17]、DING等[15-17]研究了平面运动链和平面多环耦合机构的构型自动综合问题;RAJESH等[18]基于Mckay-type算法综合了平面运动链构型;路懿等[19]基于胚图法综合了平面运动链,并提出了一种判断拓扑胚图同构的方法;NIE等[20]基于图论提出了一种添加二杆三副的方法综合平面闭环运动链构型;张林等[21]基于胚图插点法对平面闭环两自由度机构进行了构型综合,在此基础上,考虑可控装载机构的拓扑结构、功能、约束条件以及机架、铲斗、动臂存在的条件等对装载机工作装置进行了全面、系统的构型设计;朱立红等[22]基于克利福德代数中的运动学映射理论,提出了一种具有可拓展性解空间的平面杆组机构运动综合方法。随着机构学的不断发展,国内外研究学者相继提出了多种关于平面运动链的构型综合方法[23-24]。上述研究中,文献[14-17]将提出的平面机构构型自动综合方法应用于正铲液压挖掘机的工作机构,从综合到的机构拓扑图中筛选满足正铲液压挖掘机工作机构特点的构型是该方法的重点和难点,除此之外,鲜有关于正铲液压挖掘机工作机构型综合的文献报道。
本文结合正铲液压挖掘机工作机构的结构和功能特点,给出8条此类机构型综合的约束条件,提出一种12杆正铲液压挖掘机工作机构型综合方法——Ⅱ级基本杆组叠加法。
1 正铲液压挖掘机工作机构型综合理论基础
1.1 工作机构的基本结构
在不考虑正铲液压挖掘机工作机构整体绕转台转动自由度的条件下,它需具有平面内的2个移动自由度和1个转动自由度,即正铲液压挖掘机工作机构属于平面三自由度机构。从运动的角度,图1所示的机架、动臂、斗杆、铲斗之间通过轴线平行的转动副连接而成的串联机构即可满足工作机构的自由度数目和性质要求。
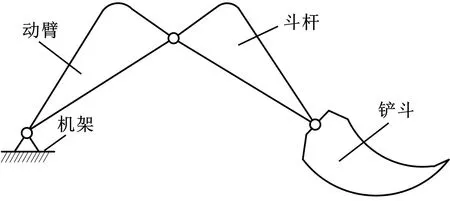
图1 机架、动臂、斗杆、铲斗组成的串联机构示意图Fig.1 Schematic of a serial mechanism composed of frame,boom,stick,and bucket
根据正铲挖掘机的工作环境和作业对象特征,一般采用液压缸驱动工作机构完成挖掘任务。正铲挖掘机工作机构具有3个自由度,因此,在图1所示串联机构的基础上,需添加3组液压缸:动臂液压缸、斗杆液压缸和铲斗液压缸。每组液压缸两端铰接构件不同,对应的工作机构构型如图2所示,有6种构型。其中,构型(a)和构型(b)即为两种经典的10杆正铲液压挖掘机工作机构构型。
1.2 型综合理论基础
平面机构的自由度公式为
F=3n-2PL-PH
(1)
式中,F为机构的自由度数目;n为机构中活动构件数(不含机架);PL为机构中低副数目;PH为机构中高副数目。

(a) (b)

(c) (d)
正铲液压挖掘机工作机构属于平面机构,其自由度数F=3,机架、动臂、斗杆和铲斗之间均通过转动副连接,液压缸两端亦通过转动副与机架、动臂、斗杆或铲斗连接。液压缸缸筒和活塞杆之间可视作移动副连接,则工作机构中只存在转动副和移动副,均为低副,即PH=0。由式(1)可得正铲液压挖掘机工作机构中活动构件数n与低副数PL之间的关系为
(e) (f)图2 10杆工作机构示意图Fig.2 Schematic of working mechanisms with 10 links
(2)
将机架考虑在内,正铲液压挖掘机工作机构的总构件数和低副数之间满足
(3)
式中,N为含机架在内的总构件数。
式(3)中构件数N和低副数PL必须为整数,且PL应为3的倍数,而N应是2的倍数,则满足式(3)的构件数N和低副数PL的组合有:PL=3,N=4;PL=6,N=6;PL=9,N=8;PL=12,N=10;PL=15,N=12;PL=18,N=14;依此类推。
当PL=3,N=4时,图1所示的构型最具有代表性,即该类构型不采用液压缸驱动;当PL=6,N=6时,该类构型中可存在1组液压缸驱动动臂、斗杆或铲斗;当PL=9,N=8时,该类构型中可存在2组液压缸;当PL=12,N=10时,可存在3组液压缸分别驱动动臂、斗杆和铲斗;当PL=15,N=12时,该类构型中除机架、动臂、斗杆、铲斗和3组液压缸外,存在2个辅助构件;当PL=18,N=14时,除机架、动臂、斗杆、铲斗和3组液压缸外,构型中存在4个辅助构件。构件数越多,构型越复杂。
目前常见的正铲液压挖掘机工作机构为10杆或12杆构型,其中,10杆构型主要取决于每组液压缸两端的铰接位置,如图2所示;12杆构型在10杆构型的基础上存在2个辅助构件,辅助构件的添加方式有多种,对应有大量构型。目前12杆构型相对较少,还有很大研究空间,因此,本文针对12杆正铲液压挖掘机工作机构开展型综合研究。
综合12杆正铲液压挖掘机工作机构型,关键在于图2所示10杆构型的基础上如何添加2个辅助构件和3个低副。主要有两种添加方式:①2个构件和3个低副以Ⅱ级基本杆组的形式整体添加到10杆构型上,即“两杆三副”式;②2个构件通过1个或2个低副分别添加到10杆构型上,即“一杆一副”和“一杆两副”式。根据机械原理可知,2个杆件和3个低副组成的Ⅱ级基本杆组自由度为零,将其作为整体添加到图2所示构型的任意2个杆件之间不会增加机构自由度,亦不会引入约束;而“一杆一副”运动链的自由度为1,“一杆两副”运动链的自由度为-1(即引入1个约束),若将“一杆一副”和“一杆两副”运动链分别添加到图2所示构型的任意2个杆件之间,将会影响原机构的自由度,为保证最终构型仍具有平面内的3个自由度,需严格按照运动和约束之间的关系添加,使得构型综合过程变得极为复杂。因此,本文采用添加Ⅱ级基本杆组的方法对正铲液压挖掘机12杆工作机构进行构型综合。
2 12杆正铲液压挖掘机工作机构型综合
2.1 Ⅱ级基本杆组叠加法构型综合的约束条件
由2个杆件和3个低副构成的Ⅱ级基本杆组有RRR、RRP、RPR、PRP、RPP共5种,如表1所示,其中,R和P分别表示转动副和移动副。在正铲液压挖掘机工作机构中,除3个驱动使用液压缸外,若2个辅助构件之间也采用移动副连接,将导致机构尺寸偏大,增大整个工作机构的质量,因此从经济实用的角度考虑,本文选择添加表1中第1种Ⅱ级基本杆组RRR展开12杆工作机构型综合。

表1 Ⅱ级基本杆组
为减少型综合完成后的筛选工作量,本文基于Ⅱ级基本杆组(RRR)叠加法对正铲液压挖掘机工作机构型综合时,结合正铲液压挖掘机工作机构的结构和功能特点,在文献[25]的基础上,将以下8条原则作为构型综合的约束条件:
(1)避免使用加长臂,即机架与动臂、动臂与斗杆、斗杆与铲斗之间不串接基本杆组RRR。机架、动臂、斗杆和铲斗串联连接即可满足铲斗平面内的2个移动和1个转动自由度需求,若其之间再串接基本杆组RRR,将增大控制难度且增加运动副累积误差。
(2)避免加长液压缸,即每组液压缸两端不串接基本杆组RRR。液压缸两端串接基本杆组RRR后,驱动链整体加长,影响驱动力的传递,进而降低对动臂、斗杆或铲斗的驱动效果。
(3)动臂液压缸一端铰接于机架,另一端直接铰接于动臂或与动臂相连的辅助构件。动臂液压缸主要用于动臂举升工况,其应对动臂相对于机架的转动起直接驱动作用,应最大程度发挥举升力。
(4)斗杆液压缸的一端铰接于斗杆或与斗杆相连的辅助构件。斗杆挖掘是正铲挖掘机的主要挖掘方式之一,斗杆液压缸的布置应有效驱动斗杆相对于动臂的转动且应最大程度提升斗杆挖掘力。
(5)铲斗液压缸的一端铰接于铲斗或与铲斗相连的辅助构件,另一端不能铰接于机架。铲斗液压缸一端铰接于铲斗或与铲斗相连的辅助构件,有助于调整铲斗姿态和增大铲斗挖掘力;另一端若铰接于机架,会大大限制整个工作机构的挖掘范围。
(6)表示液压缸缸筒和活塞杆的两个构件均为二副杆。实际中液压缸作为一个整体,其两端分别与挖掘机上的不同构件相连接,在构型综合过程中将缸筒和活塞杆视作移动副连接,则表示缸筒和活塞杆的两构件为二副杆。
(7)避免工作机构构型过于复杂,添加基本杆组RRR后,每个构件最多为四副杆。尽可能降低正铲液压挖掘机工作机构的耦合度,简化构型,降低制造成本,故限制添加基本杆组RRR后其每个构件最多为四副杆。
(8)动臂与机架、斗杆与机架、铲斗与机架之间不直接添加基本杆组RRR。动臂可绕机架转动,它与机架之间再添加基本杆组RRR,作用不明显;若在斗杆或铲斗与机架之间添加,则基本杆组两构件尺寸过小会限制机构挖掘范围,反之不经济美观。
2.2 基于Ⅱ级杆组叠加法工作机构构型综合
在上述8个约束条件下,根据添加基本杆组RRR后其两个构件为二副杆、三副杆或四副杆,分5种情况进行12杆正铲液压挖掘机工作机构型综合:
(1)两个杆件均为二副杆。在动臂、斗杆和铲斗两两之间有3种添加方式,考虑图2e和图2f两种构型不满足约束条件(5),则共有12种构型,如图3所示。
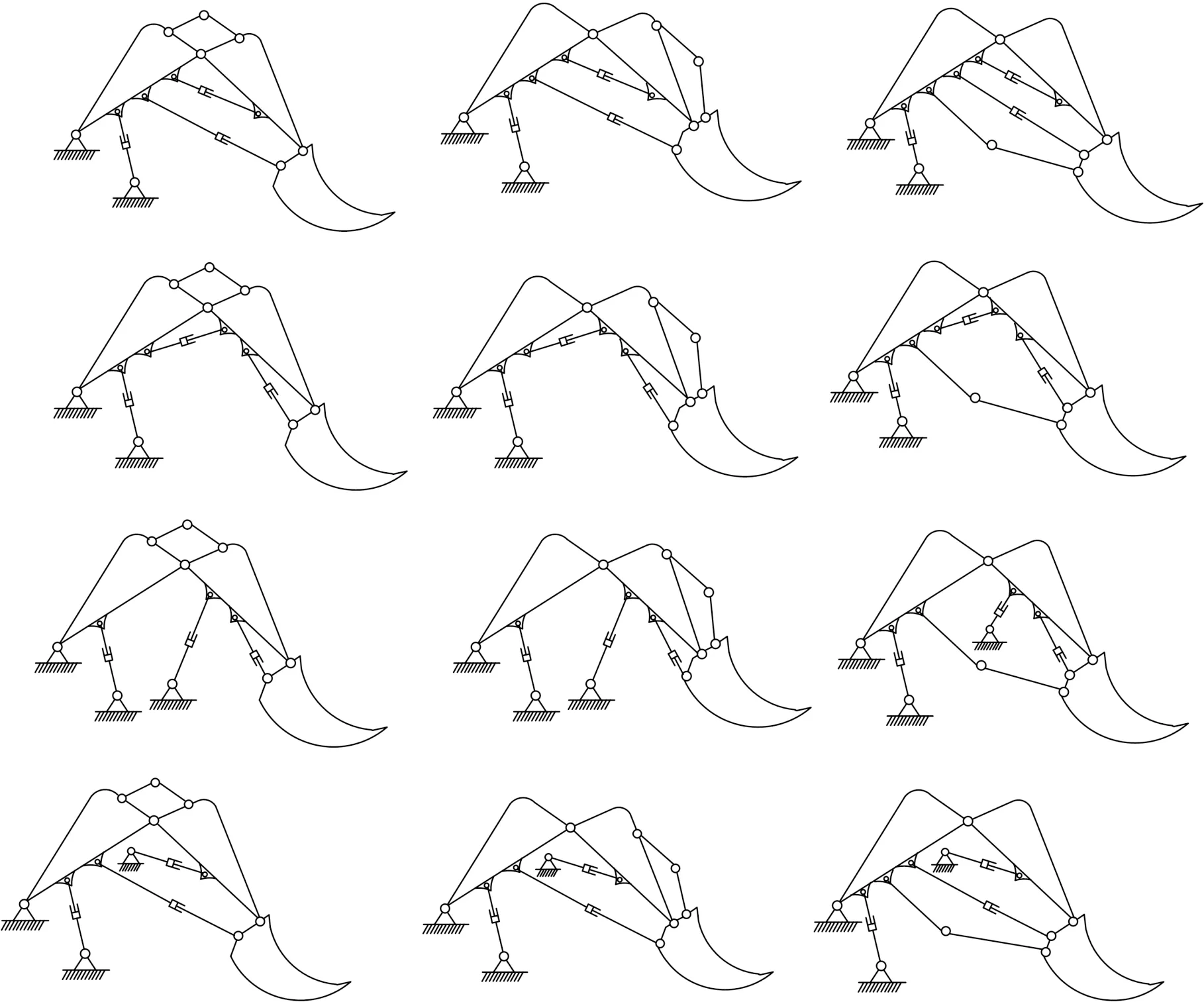
图3 12杆工作机构示意图(型综合情况1)Fig.3 Schematic of 12-link working mechanisms obtained under the first condition
(2)一个构件为二副杆、另一个构件为三副杆。首先在机架、动臂、斗杆、铲斗两两之间添加基本杆组RRR,然后将其中一组液压缸的一端连接到RRR杆组的任意一个构件上,则该构件为三副杆,另一个构件仍为二副杆。共有76种不同构的构型,限于篇幅,图4给出了其中12种构型。

图4 部分12杆工作机构示意图(型综合情况2)Fig.4 Schematic of several 12-link working mechanisms obtained under the second condition
(3)一个构件为二副杆、另一个构件为四副杆。首先在机架、动臂、斗杆、铲斗两两之间添加基本杆组RRR,然后将其中两组液压缸的一端连接到RRR杆组的同一个构件上,则该构件为四副杆,另一个构件仍为二副杆。共有35种不同构的构型,图5给出了其中6种。

图5 部分12杆工作机构示意图(型综合情况3)Fig.5 Schematic of several 12-link working mechanisms obtained under the third condition
(4)两个构件均为三副杆。在含10个杆件、12个低副的构型基础上添加Ⅱ级基本杆组RRR后,该杆组的两个构件均为三副杆。这类构型的特点是基本杆组RRR的每个构件上均有一组液压缸与之相连。共有54种不同构的构型,图6所示为其中6种。

图6 部分12杆工作机构示意图(型综合情况4)Fig.6 Schematic of several 12-link working mechanisms obtained under the fourth condition
(5)一个构件为三副杆、另一个构件为四副杆。在含10个杆件、12个低副的构型基础上添加Ⅱ级基本杆组RRR后,该杆组的一个构件为四副杆,另一个构件为三副杆。这类构型的特点是基本杆组RRR的每个构件上至少有1组液压缸与之相连,3组液压缸的一端均连接到基本杆组RRR的构件上。共有14种不同构的构型,图7所示为其中4种。

图7 部分12杆工作机构示意图(型综合情况5)Fig.7 Schematic of several 12-link working mechanisms obtained under the fifth condition
综上,在前述8个约束条件下,基于Ⅱ级基本杆组叠加法的正铲液压挖掘机工作机构型综合获得了一系列不同构的12杆构型。采用该方法综合出的构型无需再进行同构性判别。
3 构型综合结果验证
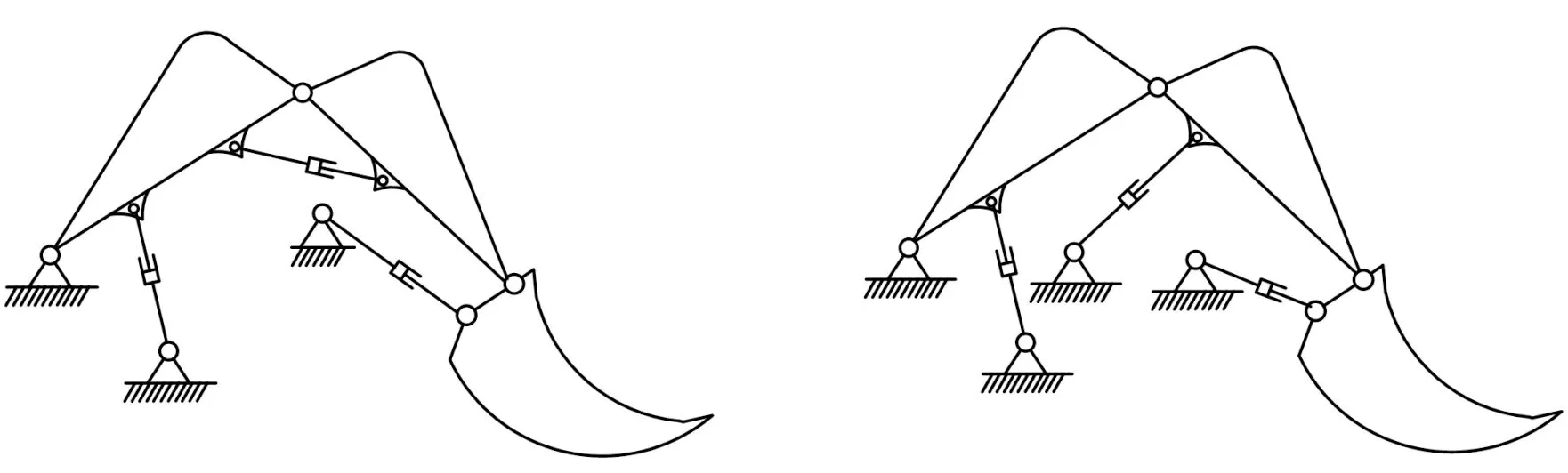
为验证本文基于Ⅱ级基本杆组叠加法综合得到的12杆正铲液压挖掘机工作机构型的正确性,综合考虑降低机构耦合度、加大液压缸驱动效果、增大动臂和斗杆的运动范围、减少各构件上的铰点数、降低多副杆数目、减小辅助构件尺寸、铲斗液压缸的布置兼顾水平推压工况[26]等原则,分别从上述第2种、第3种、第4种型综合情况下获得的构型中选取一种构型,如图8所示,分析其自由度数目和性质。

(a)第2种 (b)第3种

(c)第4种图8 选取的3种工作机构构型示意图Fig.8 Schematic of the selected three working mechanisms
图8所示正铲液压挖掘机工作机构属于平面机构,均含有12个杆件、12个转动副和3个移动副,根据式(1)即可知机构具有3个自由度。鉴于其亦属于平面多环耦合机构,这里采用文献[27]提出的拆杆-等效法验证其自由度。以图8a所示构型为例,为便于分析,将各杆件之间的连接关系重新表示,如图9所示。
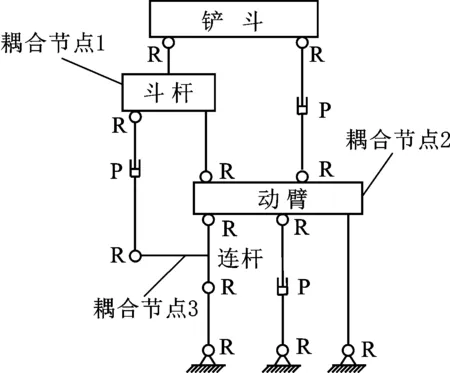
图9 图8a机构中各杆件的连接关系Fig.9 Connection relationship among links of themechanism shown in Fig.8a
将铲斗看作运动输出构件,与其相连的分支有两个,这两个分支之间存在耦合,耦合节点分别为斗杆、动臂和连杆。为分析铲斗的两分支提供给铲斗的结构约束,先断开铲斗以及铲斗与斗杆、动臂相连的运动链R和RPR,如图10所示,运动构件受到的约束为所有与其相连的分支提供的约束的并集,显然,动臂相对于机架的自由度由其单R分支决定,即动臂相对于机架具有1个转动自由度,斗杆与耦合连杆之间的RPR运动链为平面无约束链,故其对斗杆自由度无影响,因此,斗杆与机架之间的等效串联运动链为RR。恢复铲斗以及铲斗与斗杆、动臂相连的运动链R和RPR,考虑斗杆和机架、动臂和机架之间的等效串联运动链,其组成的机构如图11所示。

图10 断开铲斗和与之相连的R、RPR链后的构型Fig.10 Configuration after disconnection of bucket and itsconnecting chains R and RPR
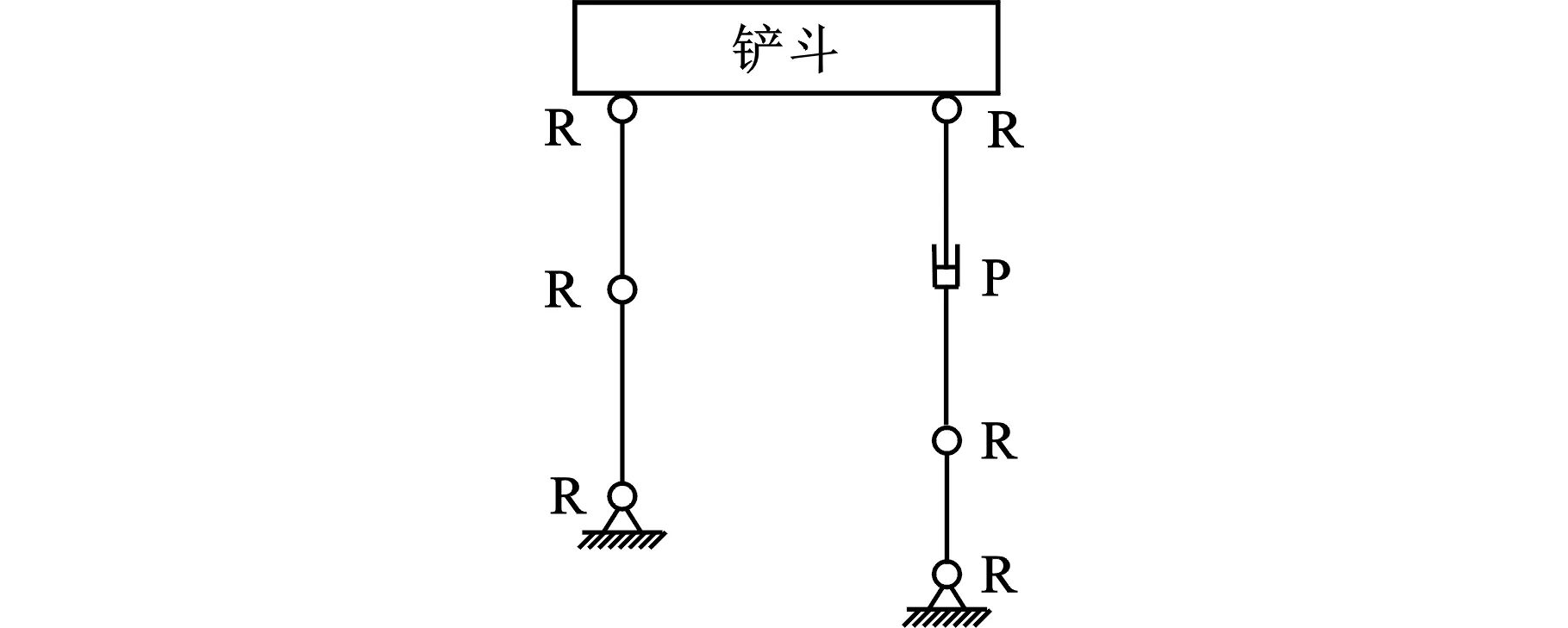
图11 图8a机构的运动等效机构示意图Fig.11 Schematic of the kinematic equivalent mechanism of that shown in Fig.8a
由图11可知,分支RRR和RPRR均提供给铲斗2个与分支中转动副轴线垂直的约束力偶和1个与分支中转动副轴线平行的约束力,因此,铲斗具有3个自由度,分别为绕分支中转动副轴线的转动和2个与分支中转动副轴线垂直的移动,与正铲液压挖掘机工作机构的运动需求相吻合。
同理可得图8b和图8c所示工作机构亦具有平面内的2个移动自由度和1个转动自由度。
4 正铲液压挖掘机工作机构运动仿真分析
给定图8a所示正铲液压挖掘机工作机构的一组结构参数,基于三维建模软件和Adams仿真软件建立其仿真模型,如图12所示。
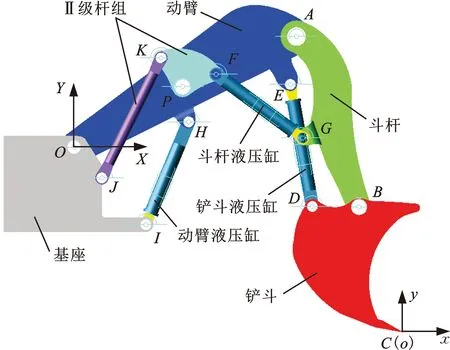
图12 图8a机构的仿真模型Fig.12 Simulation model of the working mechanism shown in Fig.8a
正铲液压挖掘机在进行周期作业时主要有斗杆挖掘、水平推压和动臂举升3种典型工况。基于Step函数分别给定动臂液压缸、斗杆液压缸和铲斗液压缸的一组驱动位移,如图13所示。其中,0~1 s,铲斗液压缸动作,进行铲斗挖掘;1~3 s,斗杆液压缸和铲斗液压缸同时动作;3~5 s,动臂液压缸动作,完成举升动作;5~6 s,铲斗液压缸动作,完成卸料;6~7 s和7~8 s,铲斗液压缸和斗杆液压缸先后反向动作至初始位置;8~9 s,动臂液压缸反向动作,动臂下降,最终铲斗回到初始位置和姿态,工作机构完成一个工作周期。测得铲斗末端点C的轨迹如图14和图15所示,即为工作机构的工作空间;铲斗姿态相对初始状态的变化如图16所示。

图13 三组液压缸的驱动值Fig.13 Driving values of the three hydraulic cylinders

图14 工作机构铲斗末端的轨迹Fig.14 Trajectory of bucket’ end of the working mechanism

图15 工作机构的工作空间Fig.15 Working space of the working mechanism
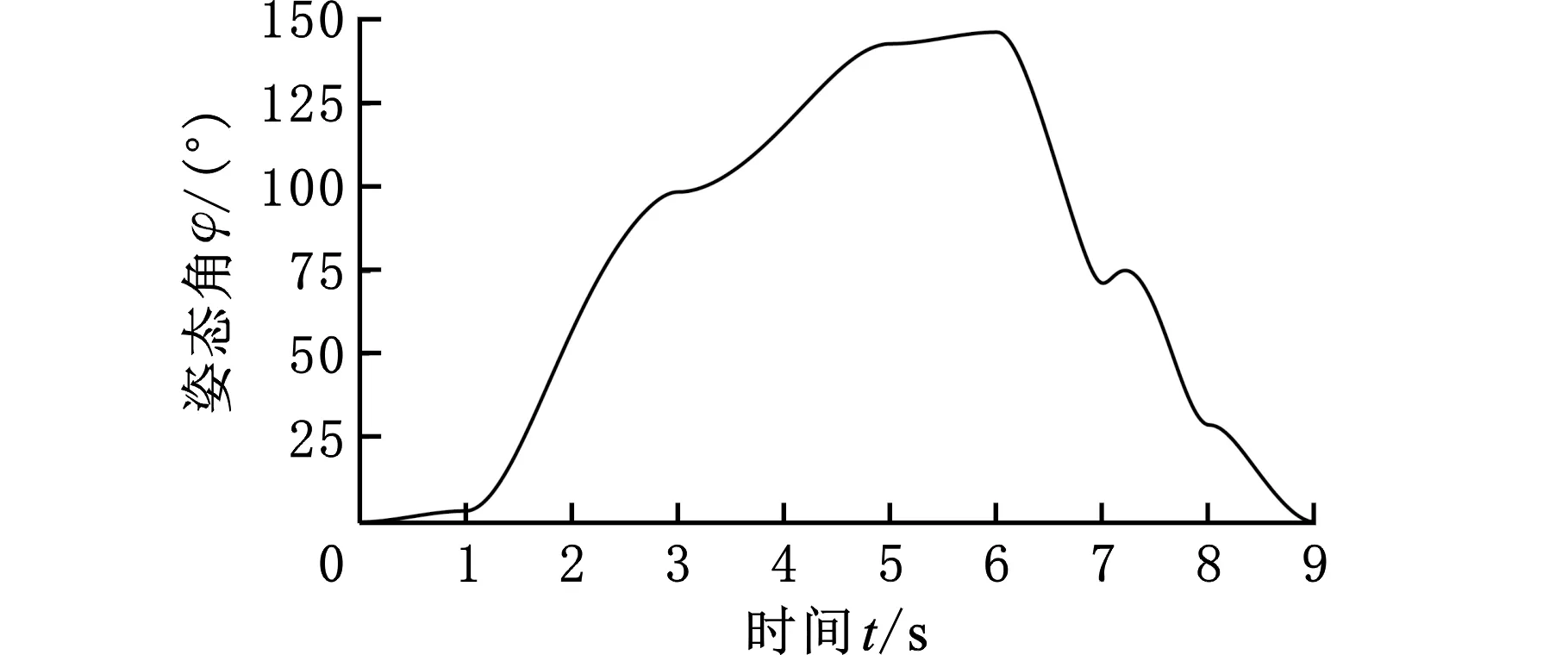
图16 相对初始状态铲斗的姿态变化曲线Fig.16 Orientation change curve of the bucket relative to its initial state
由图14~图16可以看到,图8a所示工作机构的铲斗可实现正铲液压挖掘机在平面内的2个移动和1个转动。同理,建立图8b和图8c所示机构的仿真模型,并添加驱动,其铲斗均具有平面内的3个自由度。图17和图18分别给出了两种机构的初始位姿及其在动臂举升工况下的位姿。

(a)初始位姿 (b)动臂举升工况下的位姿图17 图8b所示工作机构的两种位姿Fig.17 Two positions and orientations of the working mechanism shown in Fig.8b

(a)初始位姿 (b)动臂举升工况下的位姿图18 图8c所示工作机构的两种位姿Fig.18 Two positions and orientations of the working mechanism shown in Fig.8c
理想情况下,正铲液压挖掘机在动臂举升工况下,只需工作机构动臂液压缸动作,斗杆液压缸和铲斗液压缸闭锁,举升过程中铲斗姿态不变或变化足够小,以防铲斗中物料洒出;在斗杆挖掘工况下,只需斗杆液压缸动作,铲斗液压缸和动臂液压缸闭锁,铲斗始终保持最优后角挖掘;在水平推压工况下,只需斗杆液压缸动作,铲斗液压缸和动臂液压缸闭锁,在推压过程中需保持推压角不变。因此,后续需要结合正铲液压挖掘机在典型工况下的运动特性和力学性能对工作机构进行优化设计。
5 结论
(1)提出了一种正铲液压挖掘机工作机构型综合的Ⅱ级基本杆组叠加法,根据添加Ⅱ级基本杆组RRR后其两个构件为二副杆、三副杆或四副杆等特征,分5种情况展开了综合,获得了一系列12杆正铲液压挖掘机工作机构构型。
(2)提出的基于Ⅱ级基本杆组的叠加法将正铲液压挖掘机工作机构的8条筛选原则作为构型综合的约束条件,减小了构型综合完成后的筛选工作量,该方法适用于综合自由度和部分结构已知的机构,也为其他类型多环耦合机构的构型综合提供了一种新思路。
(3)从不同的构型综合情况中选取了3种12杆正铲液压挖掘机工作机构型,采用拆杆-等效法分析了其自由度,建立了相应的仿真模型,进行了运动仿真分析,验证了本文提出的正铲液压挖掘机工作机构型综合方法的可行性。
猜你喜欢
鞍钢技术(2022年3期)2022-06-12
军民两用技术与产品(2022年1期)2022-06-01
中国金属通报(2021年17期)2021-12-23
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
学生天地(2020年16期)2020-08-25
电子制作(2018年11期)2018-08-04
北京航空航天大学学报(2017年10期)2017-04-20
有色金属设计(2015年2期)2015-02-28
专用汽车(2014年1期)2014-12-10
筑路机械与施工机械化(2014年10期)2014-03-01