针对森林背景的去雾图像优化
2022-08-28 02:28:20孟宇彤赵康军赵伟
森林工程 2022年4期
孟宇彤,赵康军,赵伟*
(1.东北林业大学 信息与计算机工程学院,哈尔滨 150040;2.临沭县工业和信息化产业发展中心,山东 临沂 276700)
0 引言
森林是国家的重要资源,对森林进行智能化监控非常重要。气象学定义,大气中因悬浮的水汽凝结,能见度低于1 000 m的天气现象为雾[1]。在深秋和初冬,因清晨气温低且植物呼吸作用达到顶峰,水汽易凝结,导致雾的形成。大雾反射大量太阳辐射,使森林能见度下降,对现有的森林实时监测管理造成干扰阻碍,因此设计一种优化的全天候去雾算法尤为重要。
就国内外研究现状而言,图像去雾算法主要分为3类:一是基于数字图像处理技术中图像增强的去雾方法,主要包括空域和频域的增强算法,如Retinex算法[2-4]、均衡化算法、双边滤波方法[5]和高斯滤波[6]等,该类算法虽然可以明显提升对比度、去除噪点、还原图像的视觉效果,但却忽略了雾天图像降质机理,无法从本质上解决问题,使得图像去雾的效果有限,也造成了还原的图片不真实问题。二是基于物理模型的去雾方法[7],主要有基于暗通道先验的去雾算法[8]、区域分割方法[9]和基于暗通道融合亮通道优化方法[10]等。He等[11]统计分析了大量户外无雾图像,通过构建雾化图像的物理模型得出暗通道先验理论,该理论能够恢复出较为清晰完整地去雾图像,但该类算法的缺点是在不满足暗通道先验理论的天空区域会产生严重的颜色畸变。对此许多学者在暗通道先验算法基础上提出了改进措施:Yan等[9]通过边缘检测的方法分离得到天空区域,并将其提取出来进行先验处理,这种算法的缺点是在图像像素变化剧烈的边缘处会出现光晕效应且伴随色彩失真,恢复出的图像在边界处存在光晕和伪影;李鹏飞等[10]提出了使用暗通道和亮通道结合的方法来进行图像去雾;蒯峰阳等[12]在亮暗通道融合算法的基础上通过大量实验优化了大气光的强度值,在户外去雾方面取得了较为理想的效果,但在森林图像去雾方面存在局限性。三是基于深度学习的去雾算法[13],通过庞大的数据库训练模型,进而对输入的测试图像进行处理,这类算法的缺点是需要大量的数据集进行训练和测试,但目前图像数据集有限,并且合成的去雾图像和实际图像仍有所差别。
1 森林背景图像去雾的优化
本研究先采用自适应算法对图片的亮度进行计算并根据需要进行亮度调整,然后在亮暗通道去雾的物理模型基础上,针对森林的空气湿度等特殊条件,对空气中的大气光、透射率等参数进行优化,后续进行高斯曲率滤波去除光晕效应,利用图像增强和大气介质成像模型的优势改进得到更为清晰完整的森林去雾图像,从而为森林监测提供更好的数据支持和保障。设计的去雾图像处理流程如图1所示。

图1 设计的去雾图像处理的流程图Fig.1 The flow chart of defogging image processing
1.1 自适应算法预处理
在容易产生浓雾的深秋和初冬森林环境中,图像的色彩度相对单一,多为黑色、褐色、暗绿色以及白雾色,树木枝干缝隙狭小导致光照不足,采集到的图像质量较差,如图2所示。

图2 雾天森林图像Fig.2 Forest images on foggy days
因此采用自适应算法对图像进行预处理。将输入图像HSV(Hue Saturation Value)颜色空间的明亮度进行压缩,用像素点亮度值和图像最大亮度值分别除以对数平均亮度,如公式(1)
(1)

(2)
式中:N表示像素总数;δ是一个很小的值,用于避免对纯黑色像素进行对数计算时数值溢出[14]。
公式(1)表明,当对数平均亮度向高值收敛时,对数函数的形状收敛为线性函数。可见,低明亮度的场景比高明亮度的场景得到更多的提升。根据场景的对数平均明亮度能使场景整体明亮度充分压缩。

1.2 自适应局部亮度增强算法(Adaptive Local Tone Mapping,ALTM)
(3)
(4)
式中:|Ω|为图像中的正方形像素块的个数;Ω(x,y)表示正方形像素块的区域;(ξx,ξy)为Ω(x,y)区域内临近像素点(x,y)的像素点坐标;a(ξx,ξy)和b(ξx,ξy)为线性系数,满足公式(5)和公式(6)。
(5)
b(ξx,ξy)=μ(ξx,ξy)-a(ξx,ξy)μ(ξx,ξy)。
(6)
式中:μ(ξx,ξy)与σ(ξx,ξy)分别为预处理图像Ig在Ω(x,y)区域的像素块均值和方差;μ2(ξx,ξy)是在Ω(x,y)区域内Ig平方的均值。
在经过图像局部像素亮度值调整和滤波优化后,能够实现高动态范围的图像自适应增强。实验证实,经过光照增强的夜晚森林去雾图要比直接去雾的森林夜晚图效果好得多,实验结果如图3所示。

图3 自适应算法增强效果图Fig.3 Adaptive algorithm enhancement image
1.3 亮暗通道融合算法
暗通道先验算法是一种基于物理模型的去雾方法,在确定雾化图像模型的基础上完成降质图像的恢复工作。本研究在暗通道的基础上进行改进,以达到更好的去雾效果。
在计算机视觉领域,雾化图像的表示通常见公式(7)。
Iout(x,y)=J(x,y)t(x,y)+A[1-t(x,y)]。
(7)
式中:J(x,y)为无雾情况的场景色彩信息;t(x,y)为有雾情况的透射率;A为全局大气光,与场景辐射的衰减有关,通常用常数来表示。去雾模型是根据A为主要光源场景的假设,无雾场景J(x,y)可以表示为
(8)
He等[11]通过统计分析大量的户外无雾图像得到统计经验:在无雾情况下,彩色图像分解成的R、G、B三通道中,总会有至少1个通道色彩强度较小,表示为Jdark,并且Jdark→0,对于任意图像J,暗通道Jdark(x,y)满足
Jdark(x,y)=minx,y∈Ω(x,y)(minc∈{R,G,B}Jc(x,y))。
(9)
式中:minc∈{R,G,B}Jc(x,y)表示在像素点(x,y)的R、G、B通道中取色彩强度最小值;c表示图像R、G、B三通道中的某一通道;minx,y∈Ω(x,y)表示取以(x,y)为中心的局部方块内色彩强度最小值;2个取最小值的算子顺序可以进行交换。
Jlight(x,y)=maxx,y∈Ω(x,y)(maxc∈{R,G,B}Jc(x,y))。
(10)
像素点处的亮通道强度趋于无雾图像的大气光强度,即Jlight→Alight。Ω(x,y)是以(x,y)为中心的局部方块,maxx,y∈Ω(x,y)为Ω区域内色彩强度最大值。
由上可知,有雾图像在非天空区域的暗通道强度趋于零,亮通道强度趋于无雾时大气光强度。蒯峰阳等[12]利用亮暗通道的算法,得出图像亮通道的大气光值为Alight,将暗通道先验估计的大气光值记作Adark,将Alight和Adark以3∶1的权重进行加法运算,最终得到亮暗通道融合算法估计的大气光强度数值。亮暗通道共同估计大气光的实质是对暗通道先验估计出的全局大气光进行逐点修正。这一修正过程避免了使用同一常数值进行去雾的不准确性,提高了图像去雾的可靠性。
(11)
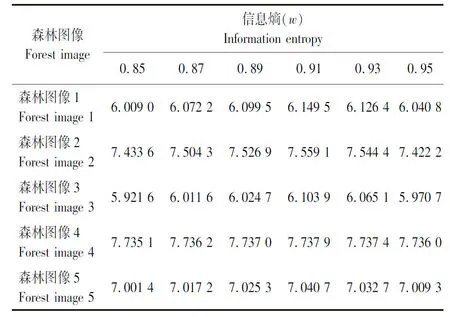
表1 透射率与信息熵的关系Tab.1 Relationship between transmittance rate and information entropy
在用亮暗通道融合算法估计大气光值以及根据实验得出适合森林环境的去雾参数后,得到图像如图4所示。从图4可以看出,图像光线变亮,树木的枝叶清晰可见,图像对比度也明显提高。此时去雾效果较理想,但树木的尖端边缘存在光晕,也说明去除Halo效应十分必要。

图4 亮暗通道融合算法去雾效果图Fig.4 Defogging image of light and dark channel fusion algorithm
2 Halo光晕效应的优化
经亮暗通道融合去雾算法对透射率、全局大气光等参数进行优化,森林雾气图像得到较好地恢复,但亮暗通道融合去雾算法造成图像的Halo光晕效应无法避免。Halo效应会让图像中介于天空和森林间的分界线过于明显,造成图像不真实感。
蛛丝从他的身体上空掠过,射在不远处的凸石上,像张开的五指,扒住了石面。随后,唐飞霄借着蛛丝的拉扯力,如飞天蜘蛛,倏地朝天葬师扑来。他那八足伸展起来,体长怕是已超过了两丈,而他与天葬师的距离,也不过才七八丈远,这一跃之间,便已到了近前,扬起钢钎一般的前足,朝着天葬师当胸插下!
针对亮暗通道去雾算法出现的Halo光晕效应,本研究采用高斯曲率滤波对Halo光晕进行边界模糊处理,使光晕变得不明显,图像更趋近于真实。
2.1 高斯曲率滤波
曲率滤波是一种从微分几何的角度最小化相关曲率以实现图像优化的方法。Lee等[16]提出,高斯曲率是图像信号的固有性质,因此可以根据性质构造高斯曲率滤波器来优化图像。Gong[17]根据图像信号的高斯曲率,设计了高斯曲率滤波的优化解法,既避免了求解高斯曲率的二阶偏导,又能保持图像的梯度和边缘细节信息。该理论假设理想无噪图像所构成的曲面是分块可展的,根据微分几何[18-19]等知识已知一个曲面是可展曲面当且仅当高斯曲率为0。
在森林图像Halo效应的处理上,本算法使高斯曲率最小化,以此达到去除图像上的光晕噪点、平滑图像的目的。设J经去雾处理后转化为确定的离散数字图像,U表示需要估计的输出图像。将图像解释为数据空间上的一个几何曲面,利用高斯曲率作为约束重建细节和边缘平滑的未知图像。
2.2 域分解求解过程
域分解[20]求解过程是通过调整各点像素值使其位于邻域像素的切平面上来满足可展条件。求解采用最小距离调整原则:对于(i,j)坐标的像素点,首先将空间进行分解从而去除邻域像素之间的关联性,使二维图像中的像素点分成水平方向和垂直方向上的同类像素均不相邻;其次计算像素点(i,j)与3×3窗口内的邻域像素构成的三角切平面的距离,由于像素点到三角切平面的投影有8种,即有8种投影距离,三角切平面的情况如图5所示;最后将8种投影距离的最小值作为投影算子对当前像素值进行修正。8种投影距离的求解方法为
d1=(U(i-1,j)+U(i+1,j))/2-U(i,j)
d2=(U(i,j-1)+U(i,j+1))/2-U(i,j)
d3=(U(i-1,j-1)+U(i+1,j+1))/2-U(i,j)
d4=(U(i-1,j+1)+U(i+1,j-1))/2-U(i,j)
d5=U(i-1,j)+U(i,j-1)-U(i-1,j-1)-U(i,j)
d6=U(i-1,j)+U(i,j+1)-U(i-1,j+1)-U(i,j)
d7=U(i,j-1)+U(i+1,j)-U(i+1,j-1)-U(i,j)
d8=U(i,j+1)+U(i+1,j)-U(i+1,j+1)-U(i,j)
|dm|=min{|di|,i=1,2,…,8}
(12)
式中:U(i,j)表示(i,j)坐标处的输出像素值;di(i=1,2,3, …,8)表示曲面上(i,j)点与不同邻域点所在切平面的距离,在此过程中寻找最小|di|,即高斯滤波曲率,采用滑动窗口对整幅图像进行滤波操作即可得到平滑后的目标图像;dm为寻找到的最小距离。
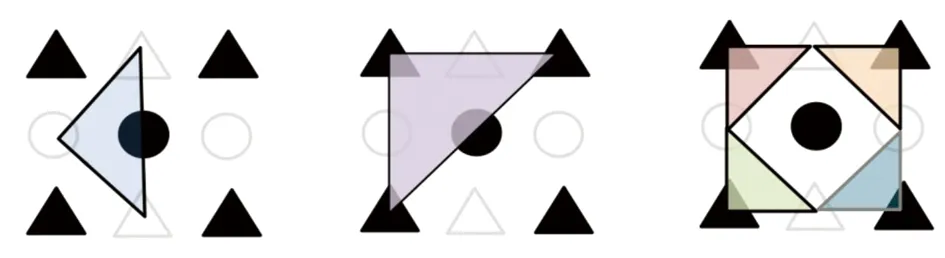
图5 高斯曲率滤波优化中三角切平面种类Fig.5 Types of triangular tangent planes in Gaussian curvature filtering optimization
3 结果和分析
为验证改进算法的去雾效果,该研究在Matlab2015b软件、Windows 10环境下进行了一系列仿真,将本研究优化算法与ALTM算法、暗通道先验算法、亮暗通道结合去雾算法、自适应直方图均衡化算法等进行比较,通过图像性能评价指标对图像进行质量评估,各算法去雾效果图如图6所示。
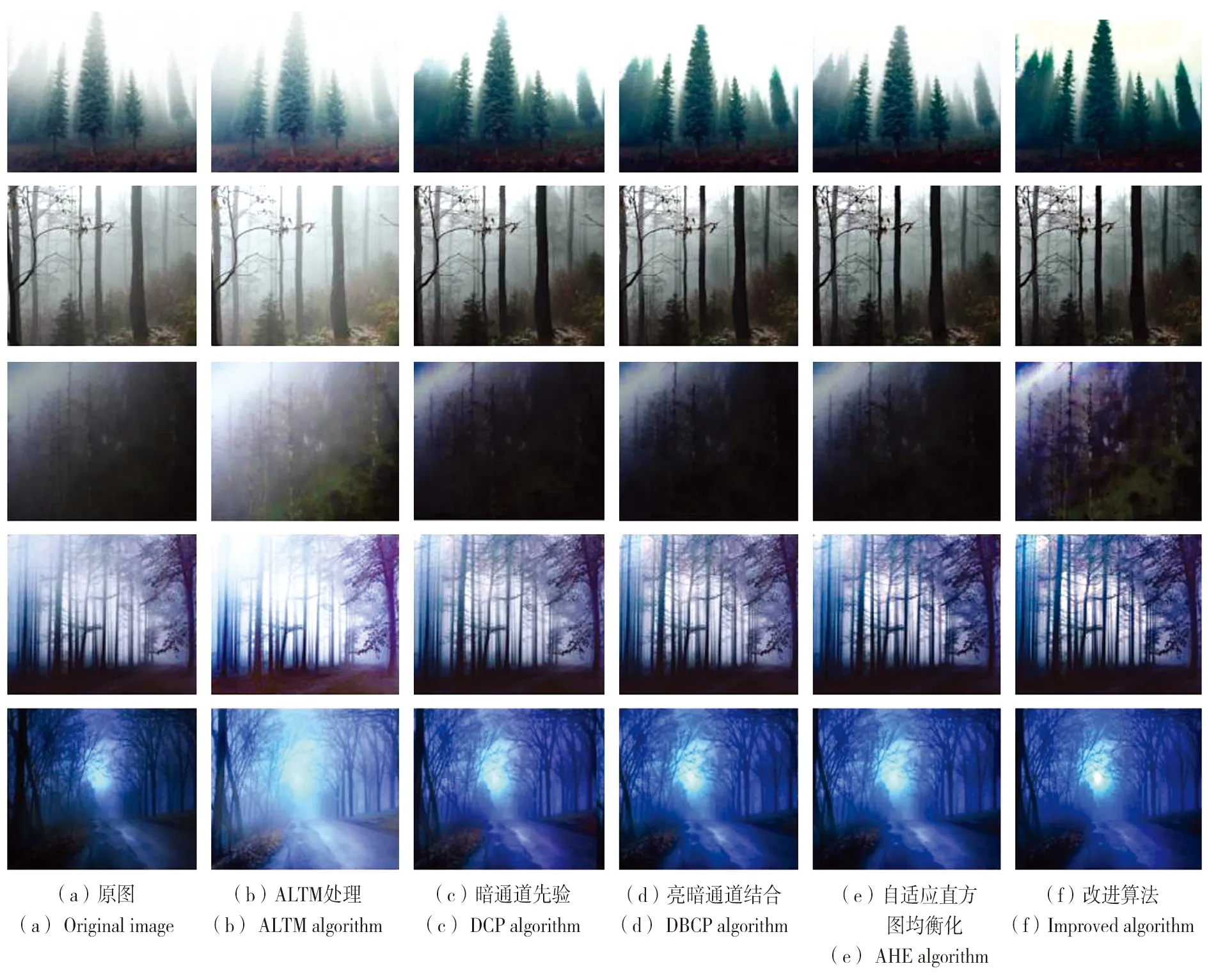
图6 不同去雾算法效果图比较Fig.6 Comparison of images of different defogging algorithms
从仿真结果中看出,改进算法对白天和夜晚的除雾效果均相对理想,以第1组图像为例,暗通道先验算法中树的尖端相对模糊,后在亮暗通道融合算法中很好地补充了尖端的部分信息,完善图像内容。从第5列图像可以看出高斯滤波算法能够解决光晕效应,第6列图像说明融合算法既去除了光晕又保留了完善的细节信息。
从客观评价维度来看,树种的颜色、形状轮廓等细节信息比较重要,方差能够反映图像增强后细节信息的丰富度,对比度可以反映图像色彩的鲜明程度,平均梯度则反映图像中灰度值变化的剧烈程度。为更客观地评价本研究的改进算法,验证其有效性,采用比较方差、对比度、平均梯度和结构相似度等指标,准确地说明优化算法比其他算法的优势,结果见表2。
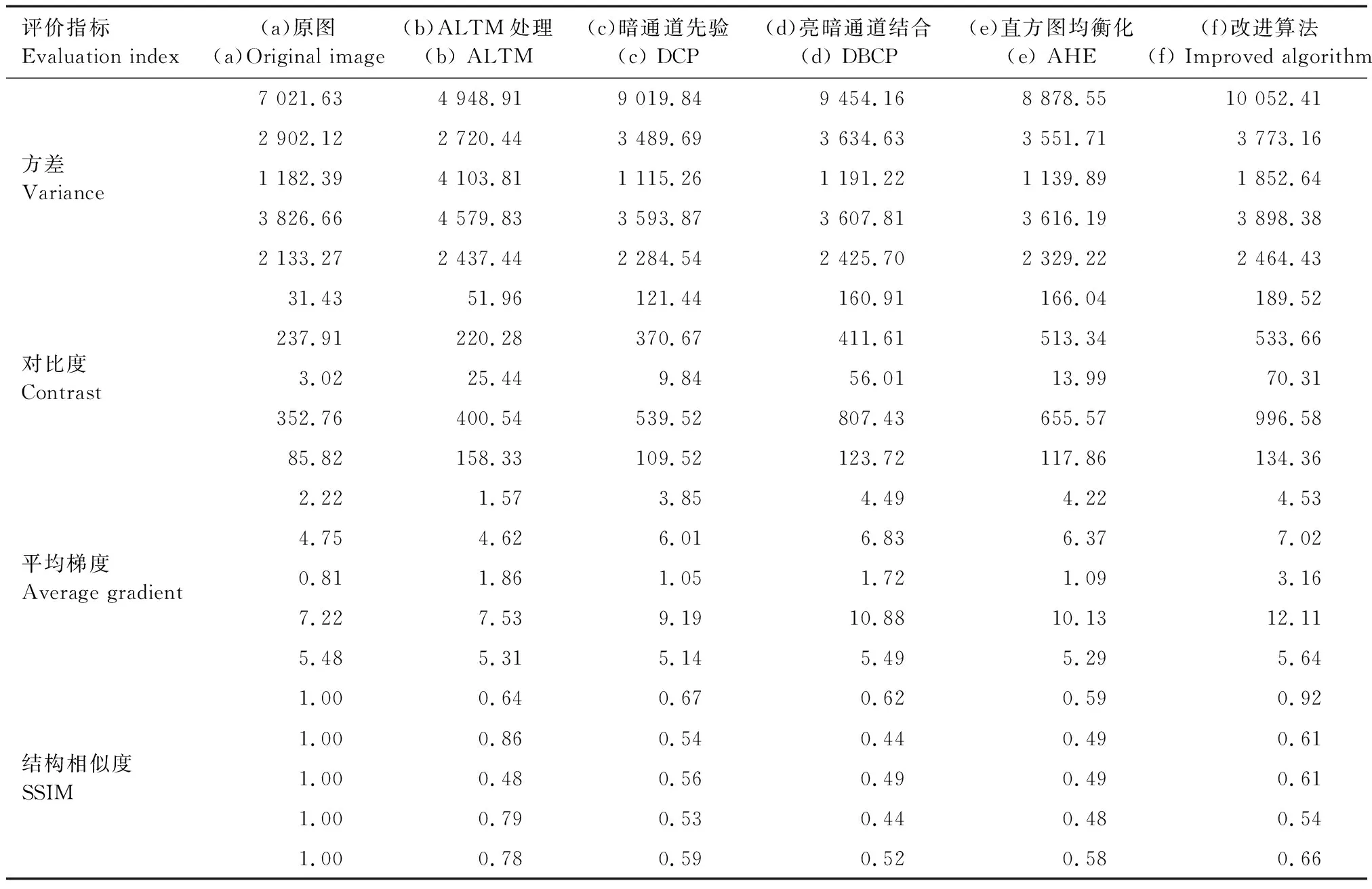
表2 不同去雾算法评价指标比较Tab.2 Comparison of evaluation indexes of different defogging algorithm
从表2可见,在白天图像中,原图的明亮度足够,此时再进行光照增强并不能增强除雾效果,甚至压缩明亮度会使图像的清晰度降低,夜晚图像经ALTM局部光照增强后,除结构相似度指标比原图差以外,其余指标均远远高于其他算法,因此把黑暗中的图像进行适当光照增强十分有必要。
由各评价指标对比可见,本研究的融合改进算法为几种算法中最理想的。用亮暗通道结合算法处理后的图像,其方差、对比度、平均梯度相对暗通道先验算法更高,表明亮暗通道结合算法处理后的图像细节丰富,颜色反差鲜明,视觉效果更好,比之前的经典算法有所改善,但从结构相似度可以明显看出图像色彩失真严重(且存在晕轮效应),因此说明经过亮暗通道处理后的图像不能够在丰富图像细节的同时保证色彩的真实。根据表2中数据可以看出,对亮暗通道融合算法进行高斯滤波,不仅保证了图像的对比度和亮度而且能使色彩的恢复更加切合实际情况。
综上所述,无论白天还是夜晚,优化改进算法从衡量指标上观察均优于原拍摄图片及其他算法,这说明优化改进的融合算法在多种评价维度的效果都是较理想的,最终能得到细节丰富、颜色鲜明、亮度适中的森林图像。
4 结论
优化改进的融合算法针对森林环境的特点,首先对采集图像亮度进行自适应调整后,结合先进的亮暗通道融合算法得到较理想的全局大气光等参数值,使图像处理效果较好;后续采用高斯曲率滤波算法进行图像的平滑处理,使图像在去除晕轮效应的同时还能保留完整的边缘信息。融合频域滤波的物理模型去雾方法不仅从大气辐射的计算公式中对参数值进行优化,而且解决了物理模型带来的光晕效应问题,能得到细节丰富、视觉效果良好的清晰完整的森林去雾图像。
猜你喜欢
作文成功之路·作文交响乐(2023年2期)2023-07-13 02:34:42
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年11期)2017-04-04 02:52:44
计算机与网络(2015年8期)2015-12-27 07:37:41
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电视技术(2014年11期)2014-12-02 02:43:28
电子设计工程(2014年20期)2014-02-27 12:01:00
测绘科学与工程(2013年4期)2013-03-11 15:07:41