
永磁外转子矿井提升机控制系统研究*
2022-08-25 02:00郑力奎寇子明
机电工程 2022年8期
郑力奎,寇子明*,吴 娟
(1.太原理工大学 机械与运载工程学院,山西 太原 030024;2.矿山流体控制国家地方联合工程实验室,山西 太原 030024;3.山西省矿山流体控制工程技术研究中心,山西 太原 030024)
0 引 言
矿井提升系统是煤矿运输过程中的关键环节,是联系矿井上下的“咽喉”。该系统是机电液一体化的大型复杂系统[1]。
随着煤矿开采深度不断增加,矿井提升系统的稳定安全运行显得尤为重要。目前使用的矿井提升机大多数采用三相异步电动机为动力源,经过减速器、联轴器等传动结构,将动力传递到提升机卷筒上。这种结构导致提升系统的传动效率低、噪音大、发热严重,以及安装维护困难等一系列问题。
为解决传统提升机存在的诸多问题,2017年,世界首台永磁外转子矿井提升机应运而生[2]。该永磁外转子矿井提升机基于永磁同步电机的原理进行设计,采用了将电机外转子直接作为提升机卷筒的创新方式,省去了诸多传动环节,提高了传动效率,降低了功耗,同时在减小噪音和发热方面有明显优势。
由于永磁外转子矿井提升机没有联轴器和减速器等中间环节,使整机的变位质量比传统提升机小;同时,钢丝绳的作用力直接作用于提升机外转子,引起提升机的气隙产生变化,增加了提升机的控制难度。
目前,针对永磁同步电机的控制方式主要有矢量控制与直接转矩控制两种。
范文进等人[3]采用连续定子磁链轨迹切换技术,对直接转矩的定子磁链切换过程进行了优化,但该方法在低速运行场合并不适用,且电机低速运行时磁链误差大,不适用于对永磁外转子矿井提升机的控制。
传统的矢量控制采用PI控制器,对提升机的参数准确性要求很高,并且容易受到外界环境的干扰,对于受负载波动影响明显的永磁外转子提升机来说并不理想。
丁文双等人[4]采用了模糊控制的方式,实时整定PID控制器的参数,但采用这种方法对速度控制器鲁棒性的提高有限。
为了设计有效的提升机控制系统,并研究相关的控制策略,通过建立可靠的仿真模型并进行仿真试验是一种可行的方案。
RADOMIRD等人[5]搭建了具有动态变量的提升机模型,通过对提升机振动的边界条件约束,估计出了提升机的临界速度。吴娟等人[6-7]考虑了尾绳质量的时变特性,建立了多绳摩擦系统5自由度数学模型,并求解了各自由度动态响应和钢丝绳张力变化。ARRASATEX等人[8]建立了一种分布式参数模型,它在降低建模难度的同时,得到了与五自由度集中参数模型同样的响应。朱真才等人[9-10]采用Hamilton原理建立了摩擦式提升机的动力学模型,并基于自适应鲁棒控制理论,设计了钢丝绳振动抑制控制器。黄家海等人[11-13]建立了落地式摩擦提升机动力学模型,并对提升机的制动特性进行了研究。
上述研究多采用数学方法建立提升系统模型,对提升系统运行过程的各种特性进行了深入的研究,但忽略了提升机控制算法和提升系统运行之间的相互作用。
史艳楠等人[14]建立了基于Unity3D的矿井提升机模型,该模型可直观展示提升机及操作台的三维模型,便于培训操作人员的技能,但未考虑提升机的动力学特性。葛明臣等人[15]研究了滑模速度控制器对提升机运行速度的影响,但未考虑提升系统负载变化所带来的影响。
基于以上研究,笔者建立永磁外转子矿井提升机的机电一体化模型,并对其进行仿真试验;考虑提升机运行过程中控制策略和提升系统负载特性的相互影响,对提升机的控制策略进行优化。
1 永磁外转子提升机结构及控制理论
1.1 永磁外转子矿井提升机结构
永磁外转子矿井提升机按照外转子永磁同步电机的原理进行设计,其结构示意图如图1所示。
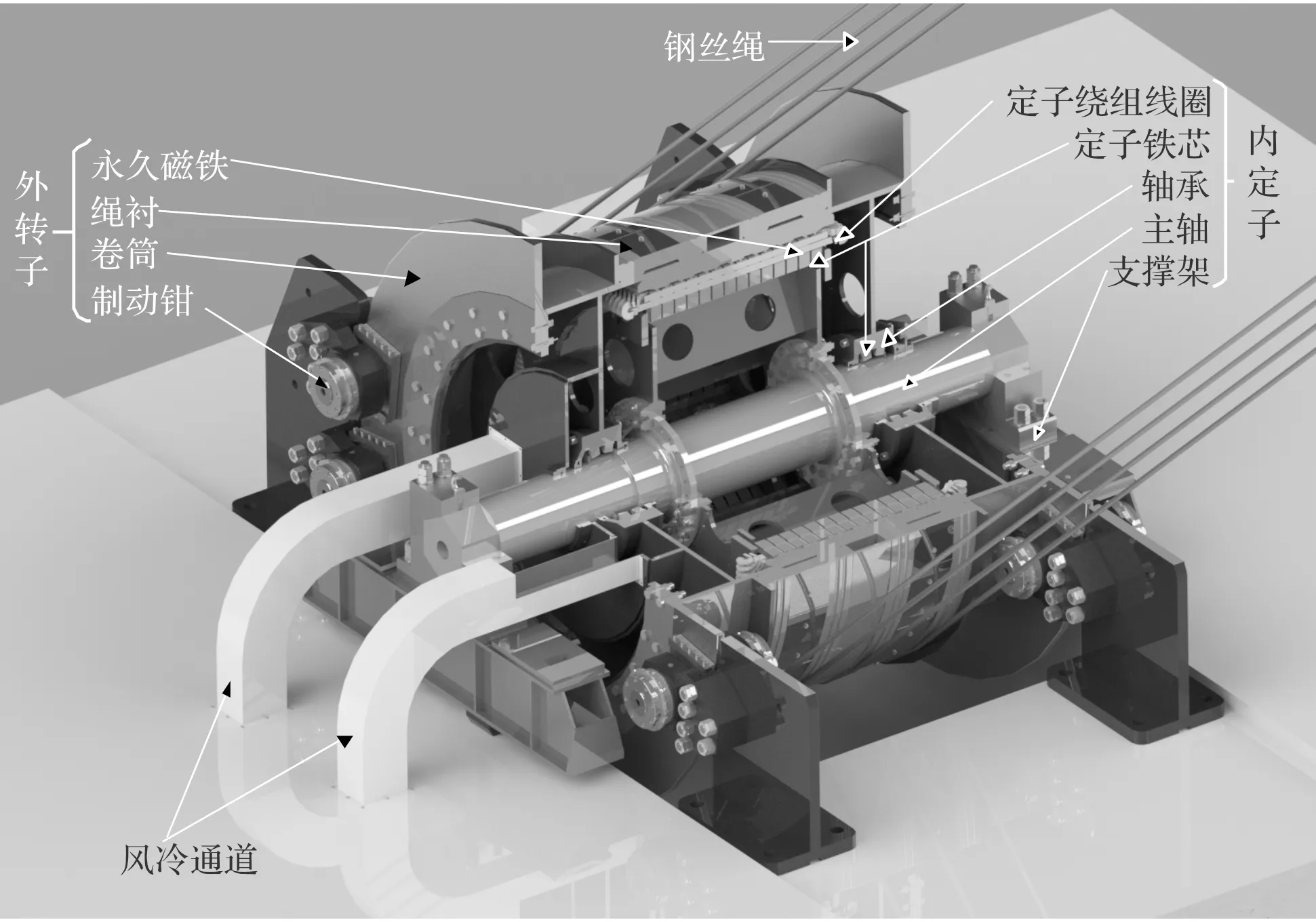
图1 永磁外转子多绳摩擦式提升机结构示意图
提升机主轴对应外转子永磁同步电机的内定子,主轴置于主轴支座上,其两端采用菱形等非圆形截面,实现主轴的沿轴向旋转自由度的约束。内定子由支撑架、绕组线圈以及定子铁芯组成。支撑架将主轴与定子铁芯连接固定。绕组线圈按照要求缠绕在定子铁芯上。外转子由卷筒和永磁体组成,永磁体采用粘贴等方式固定在卷筒内表面。
从磁路结构来看,永磁外转子矿井提升机采用了表面凸出式的转子结构,这使得其在电磁性能上属于隐极转子结构。卷筒外表面与传统多绳摩擦提升机一致,固定有摩擦绳衬,以保证钢丝绳与卷筒之间产生足够的摩擦力。卷筒两侧设计有摩擦衬垫,以供制动器制动之用。提升机设有风冷通道,用于绕组散热,以避免永磁体出现高温退磁情况,影响提升机的性能。
值得注意的是,对永磁同步电机而言,在功率一定时,电机极数越多,电机的转速越低,转矩越大。因此,永磁外转子矿井提升机作为低速大扭矩的起重设备,需要采用较大的磁极对数来满足低速大扭矩的运行要求。同时,考虑到钢丝绳弯曲半径等因素,提升机卷筒也需要有较大的直径。
此处以型号为JKMDN-3×4的多绳摩擦式永磁外转子矿井提升机为例,其卷筒直径为3 m,钢丝绳数为4根,磁极对数为32。
综上所述,多绳摩擦式永磁外转子矿井提升机是基于外转子永磁同步电机原理设计的,其具有多极数、隐极转子结构以及气隙易受负载波动影响等特点,这为其控制效果带来一定不确定性。
1.2 矢量控制理论
对永磁同步电机的控制采用矢量控制理论。矢量控制理论通过对定子电流矢量在d-q坐标系中的控制,解除了直轴和交轴分量的耦合。因此,笔者在d-q坐标系下建立提升机的数学模型。
忽略铁芯饱和、涡流损耗以及磁滞损耗的影响,并且假设定子电流为对称三相正弦波电流,可以得到提升机数学模型[16]。
其中,磁链方程为:
(1)
电压方程为:
(2)
转矩方程为:
(3)
永磁外转子矿井提升机的转子永磁体采用表贴的形式,属于隐极转子结构,交直轴电感几乎相同,即Ld≈Lq。矢量控制常用两种控制方式,即id=0控制和最大转矩电流比控制。对于隐极转子结构而言,这两种方式是等效的。因此,该处笔者采用id=0的控制方式。
此时,电压方程可简化为:
(4)
转矩方程可简化为:
(5)
机械运动方程为:
(6)
式中:ud,uq—定子电压的d轴和q轴分量;id,iq—定子电流的d轴和q轴分量;R—定子绕组的电阻;ψd,ψq—定子磁链的d轴和q轴分量;ωe—电角速度;ωm—机械角速度;pn—磁极对数;J—转子的转动惯量;Te—电磁转矩;TL—负载转矩;B—阻尼系数。
根据提升系统数学模型,笔者设计了其矢量控制系统,即提升系统控制原理图如图2所示。

图2 提升系统控制原理图
首先,将设计好的提升机速度曲线输入矢量控制系统;然后,按照提升机数学模型,转速调节器先将转速信号转换为q轴电流信号,电流调节器再将电流信号转换为电压信号,并进行必要的坐标变换;最后,在电压信号经过空间矢量调制(space vector pulse width modulation,SVPWM)后,将其输入提升机定子绕组,实现对提升机的矢量控制。
1.3 滑模速度控制器设计
考虑到提升机的运行速度相对较低,此处忽略提升机的机械阻尼,可得到如下数学模型:
(7)
定义提升机的状态变量为:
x1=ωref-ωm
(8)
式中:ωref—提升的参考角速度,数值来自速度曲线的设计;ωm—实际角速度。
设计滑模面函数为:
s=cx1+x2
(9)
求导得:
(10)
采用指数趋近律为:
(11)
得到控制器表达式:
(12)
笔者采用李雅普诺夫函数判断控制器的稳定性。令李雅普诺夫函数为:
(13)
则有:
(14)

(15)
根据李雅普诺夫稳定性判断定理可知,设计的滑模控制器是大范围一致渐近稳定的,于是进一步令:
(16)
可得:
(17)
对式(16)分离变量后,通过积分可得:
(18)
即:
(19)
由上式可知,V会在时间tr内到达稳定点,由此可求得:
(20)
考虑负载波动带来的干扰d(干扰上界为L),可得新的状态方程为:
(21)
则有:
(22)
综上所述,通过设置合理的ε和q,即可保证系统在有限时间内到达稳定状态,且不受干扰影响。
2 提升机控制系统仿真及分析
2.1 仿真模型与参数设置
基于上述对多绳摩擦式永磁外转子矿井提升机结构的介绍与矢量控制原理的分析,为了研究不同的设定速度曲线、速度控制器以及负载干扰工况下,提升机的运行状态和工作特性,笔者在simulationX中搭建多绳摩擦式永磁外转子矿井提升系统机电一体化模型,并进行相应的仿真研究。
提升系统机电一体化仿真模型如图3所示。
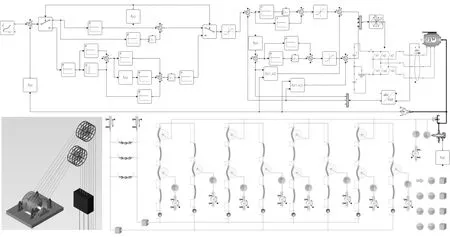
图3 提升系统机电一体化仿真模型
系统主要仿真参数如表1所示。
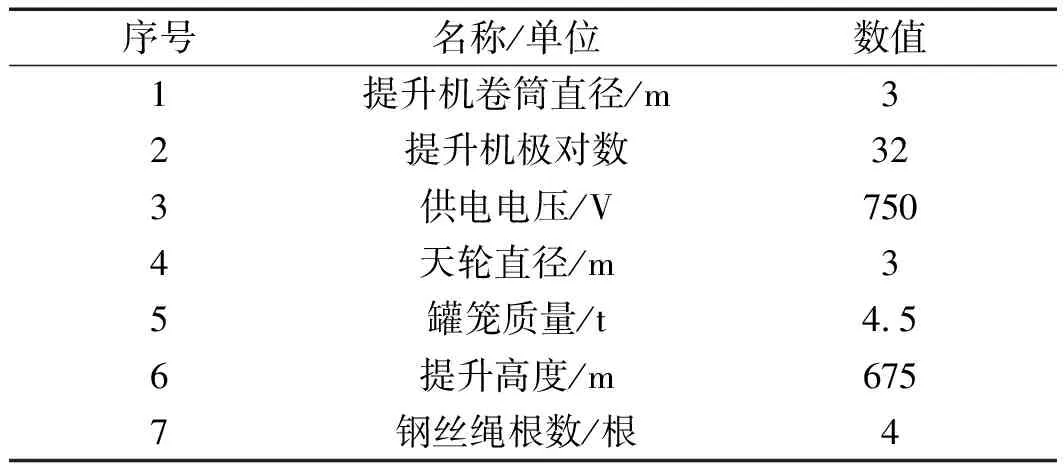
表1 主要仿真参数
2.2 仿真及结果分析
首先,根据《煤炭安全规程》规定,笔者采用简化的梯形提升机速度曲线,设定提升机最大转速为50 r/min,加减速阶段加速度为0.52 rad/s2,速度控制器为PI控制器;分别在负载无波动和负载波动条件下进行仿真,观察提升机在运行过程中的状态。
采用PI控制器的提升机加速阶段速度曲线如图4所示。

图4 采用PI控制器的加速阶段速度曲线
采用PI控制器的减速阶段速度曲线如图5所示。

图5 采用PI控制器的减速阶段速度曲线
由图5可以看出:采用传统的PI速度控制器,在提升机运行过程中,提升机速度在加速阶段结束过渡为匀速运行,以及减速停车时均出现了明显的超调现象。这是由于加速和减速阶段结束时提升机加速度发生了突变;
在负载波动条件下,提升机出现了明显的速度波动现象,这对提升机的运行不利;
由于制动器的作用,减速停车时,提升机速度曲线有明显的截断现象。
提升机q轴电流曲线如图6所示。
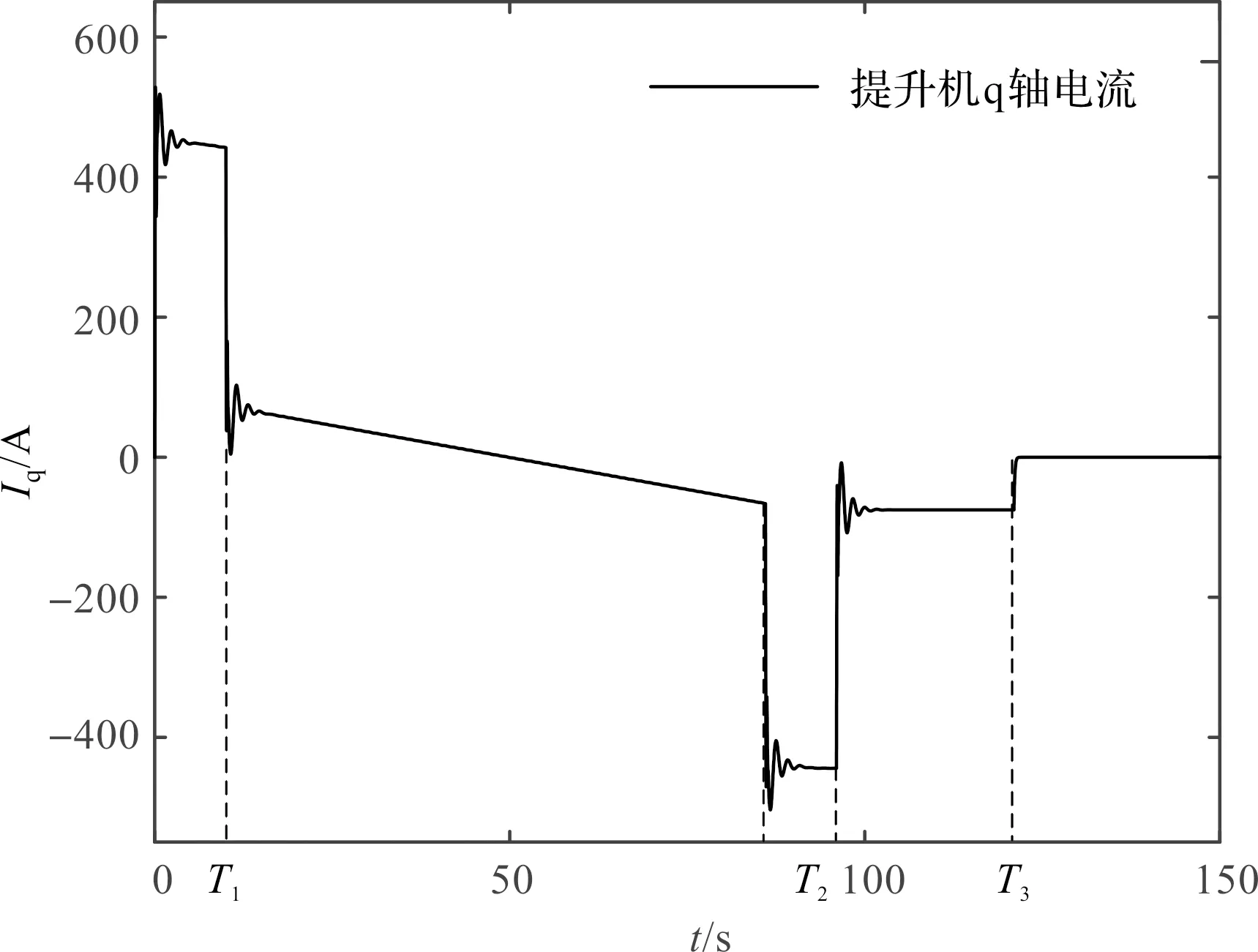
图6 提升机q轴电流曲线
从图6可以看出:
在提升机加速度发生突变时,提升机q轴电流会发生相应的突变,并在衰减震荡后达到稳定状态;随着提升系统的运行,提升机q轴电流逐渐减小;当运行到50 s左右时,两罐笼处于同一高度,提升机q轴电流为0;此后,提升机电流反向增大,直到T2时刻随提升机加速度突变而突变,而后衰减震荡至稳定状态,在提升机完成减速停止运行时(T3)衰减震荡并稳定在75 A左右,此时提升机处于重载悬停状态;最后,制动器进行停车抱死后(T4),提升机q轴电流减为0,完成一次运行。
针对提升机的速度超调以及速度波动现象,笔者采用设定平滑速度曲线的方式对其进行改善,所采用的平滑过渡加速阶段速度曲线如图7所示。

图7 采用平滑过渡加速阶段速度曲线
采用平滑过渡减速停车速度曲线,如图8所示。

图8 采用平滑过渡减速停车速度曲线
由图8可以看出:相比采用梯形速度曲线,采用平滑过渡的速度曲线,加速阶段提升机速度超调量减少了68%,减速阶段减少了67.5%;但在有负载波动条件下,提升机速度波动依旧明显。
为了进一步优化有负载波动条件下的提升机控制效果,笔者采用滑模速度控制器进行了仿真。
采用滑模控制器的加速阶段速度曲线如图9所示。
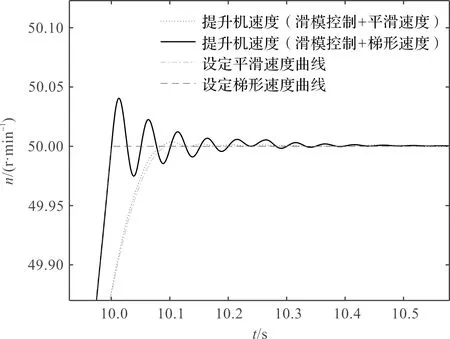
图9 采用滑模控制器的加速阶段速度曲线
采用滑模控制器的减速阶段速度如图10所示。
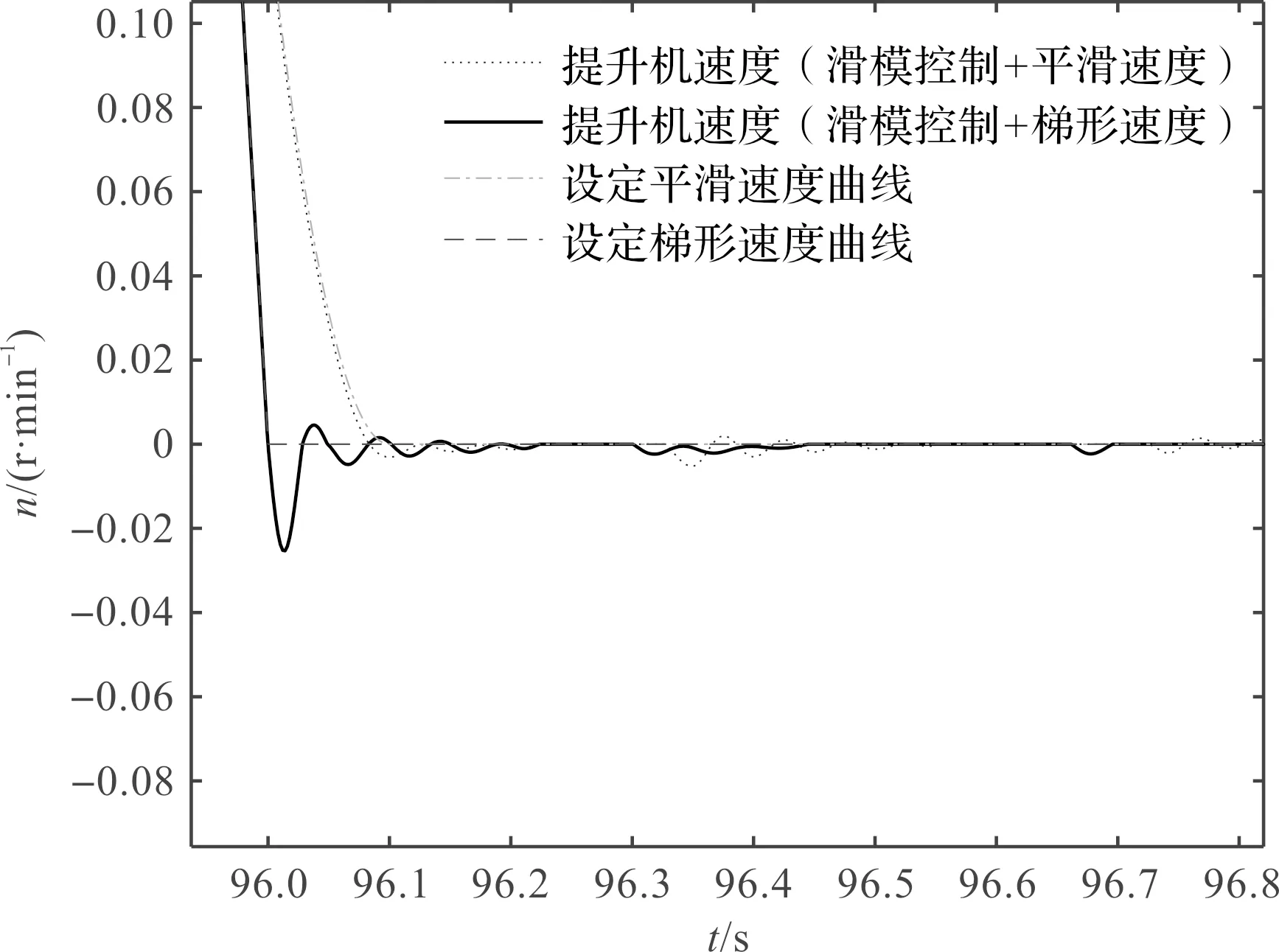
图10 采用滑模控制器的减速停车速度曲线
由图10可以看出,在不更改设定速度曲线的前提下,采用滑模速度控制器,提升机速度超调减小了73%,速度波动得到了明显抑制。
为了进一步改善其控制效果,笔者在使用平滑速度曲线的同时,采用滑模速度控制器,可以观察到,相比仅采用滑模控制器的方式,综合采取两种措施后,提升机的转速超调减小了90%。
采用上述方式虽然在一定程度上改善了对提升机速度的控制效果,但由于钢丝绳自身的弹簧阻尼特性,罐笼在速度变化时会出现衰减震荡,且震荡幅度受提升机控制方式和设定速度曲线的影响不大。
若要改善罐笼运行的稳定性,需对天轮和罐笼之间的钢丝绳进行控制,以实现罐笼运行的稳定性。
上述仿真结果表明:采用矢量控制方法可以实现对永磁外转子提升机的控制要求。[17]使用滑模速度控制器取代传统的PI速度控制器,可发挥滑模控制器鲁棒性强、抗干扰能力强的特点,不仅可以抑制提升机的速度超调,在面对负载存在波动的条件下仍可以对提升机速度实现较好的控制效果,滑模控制造成的抖振效应也在合理范围内,且抖振并不会通过钢丝绳传递到罐笼上,保证了速度的稳定性;
罐笼速度在遇到较大的波动时,会出现明显的衰减震荡,这是由于钢丝绳可视为时变的弹簧阻尼器。当提升机速度超调量较小时,可以减轻罐笼的衰减震荡,但作用有限。
由此可以看出,该仿真模型较好地反映了提升机运行过程中的特性,验证了采用改良的矢量控制方式和速度曲线设计的可行性与优越性。
3 实验验证
3.1 实验方案
为了验证笔者搭建的仿真模型和仿真结果的可靠性,笔者对某矿的多绳摩擦式永磁外转子矿井提升机进行测试。实验参数与仿真参数相同,如表1所示。
笔者在连接罐笼和钢丝绳之间的液压平衡油缸的油压支路上布置油压传感器,间接测量钢丝绳张力;压力传感器采集到的信号经INV3060S采集仪上传到上位机,再进行后续处理。
实验现场如图11所示。

图11 实验现场图
3.2 结果分析与对比
仿真与实验曲线对比,即下行罐笼钢丝绳张力曲线对比,如图12所示。

图12 下行罐笼钢丝绳张力曲线
从图12中可以看出:笔者建立的永磁外转子提升系统仿真得到的钢丝绳张力曲线与实验测试结果整体趋势一致;在加速阶段,下行罐笼受到的钢丝绳拉力较小,随后进入匀速运行阶段,由于尾绳的作用,钢丝绳张力基本呈减小;进入减速阶段时,钢丝绳对罐笼拉力增加,其自身张力随之增加;
实验过程中,在减速的最后阶段,有制动器参与制动与停车过程,因此,钢丝绳张力出现两次较大的冲击。实验结果表明,仿真模型较好地反映了提升机运行特性。
4 结束语
为了解决永磁外转子多绳摩擦式矿井提升机的负载波动影响提升系统运行的稳定性问题,笔者对提升机结构和矢量控制理论进行了分析,通过采用平滑速度曲线和滑模速度控制器优化提升机运行的稳定性,使用simulationX软件搭建了提升系统机电一体化仿真模型,并进行了仿真研究,最后结合现场实验对仿真模型的可靠性进行了验证。
研究结果表明:
(1)加速度突变对提升机速度超调有明显影响,提升机q轴电流与加速度明显相关;采用平滑速度曲线对抑制提升机的速度超调有明显效果,但对负载波动引起的速度波动没有明显的抑制作用;
(2)采用滑模速度控制器对提升机的速度超调和负载波动均有明显的抑制作用,在同时采用平滑速度曲线和滑模速度控制器时,提升机的速度波动被充分抑制;
(3)在设定同样的速度曲线条件下,仿真模型的钢丝绳张力变化曲线和实验结果吻合较好,验证了模型的准确性。
在后续工作中,笔者将研究提升机在制动工况下的运行特性,并设计相应的控制器,以保证提升系统运行过程的稳定性。
猜你喜欢
科技与创新(2022年13期)2022-07-14
客联(2022年3期)2022-05-31
电子乐园·上旬刊(2022年5期)2022-04-09
山东交通科技(2020年2期)2020-08-13
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
消费导刊(2016年10期)2016-12-01
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
中国高新技术企业(2015年13期)2015-04-30
