
霍尔效应传感器设计
2022-08-19 03:08:52吴颜飞李蔚超张绍睿米思如
微电机 2022年7期
吴颜飞,李蔚超,张绍睿,米思如
(襄阳航力机电技术发展有限公司,湖北 襄阳 441052)
0 引 言
霍尔位置传感器是电机控制系统的重要组成部分,需综合考虑识别精度、体积、环境适应性、成本等诸多因素。三相BLDC在无刷电机中应用广泛,其霍尔位置传感器具有高可靠性、高灵敏度和好的温度稳定性;采用的霍尔元件比其它传感器具有环境适应强、高可靠、无触点抖动、自身固有滞环等特点[1]。目前,霍尔效应传感器及其电机应用,有较多的论述和总结 ,但对其设计数学模型、设计要点、物理特性和识别精度,布局及电路等方面还没有完整的阐述,本文以三相BLDC霍尔效应传感器为例,进行数学仿真建模和详细论述。
1 霍尔效应传感器工作原理
1.1 SABER仿真
无刷直流永磁电动机的典型运行方式是“二相导通星型三相六状态”[2-3],下面基于MC33035DW建立Saber仿真,仿真结果如下:
(1)逆时针方向
通过Saber瞬态仿真分析,电机逆时针旋转,霍尔效应传感器在不同位置时驱动的逆变器开关管导通情况如图1所示,霍尔效应传感器位置电平信号与逆变器开关管状态如表1所示。
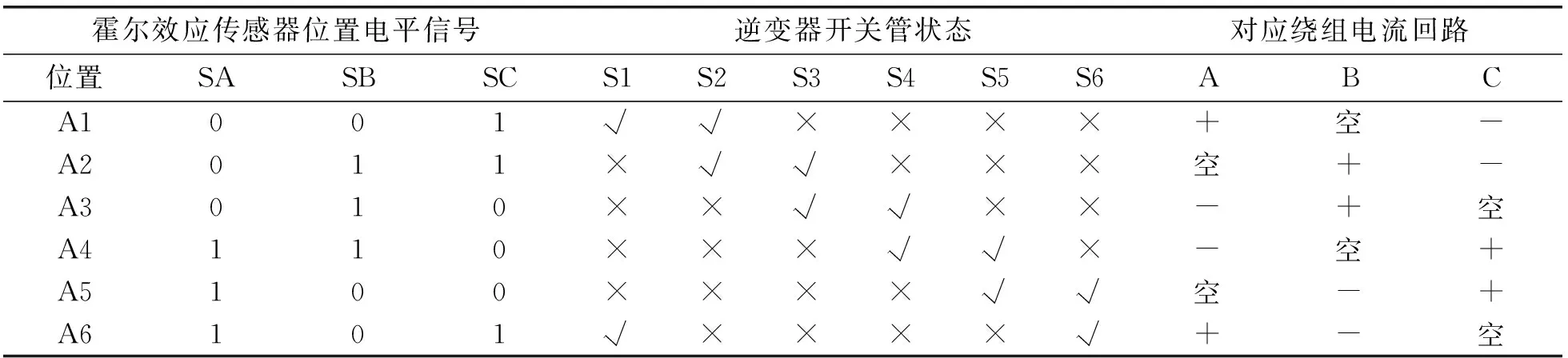
表1 开关管状态逻辑

图1 逆时针运行开关管导通仿真波形
(2)顺时针方向
将MC33035DW的换向信号接地,则可得到该方式顺时针运行的Saber仿真结果如图2所示,霍尔效应传感器位置电平信号与逆变器开关管状态如表2所示。
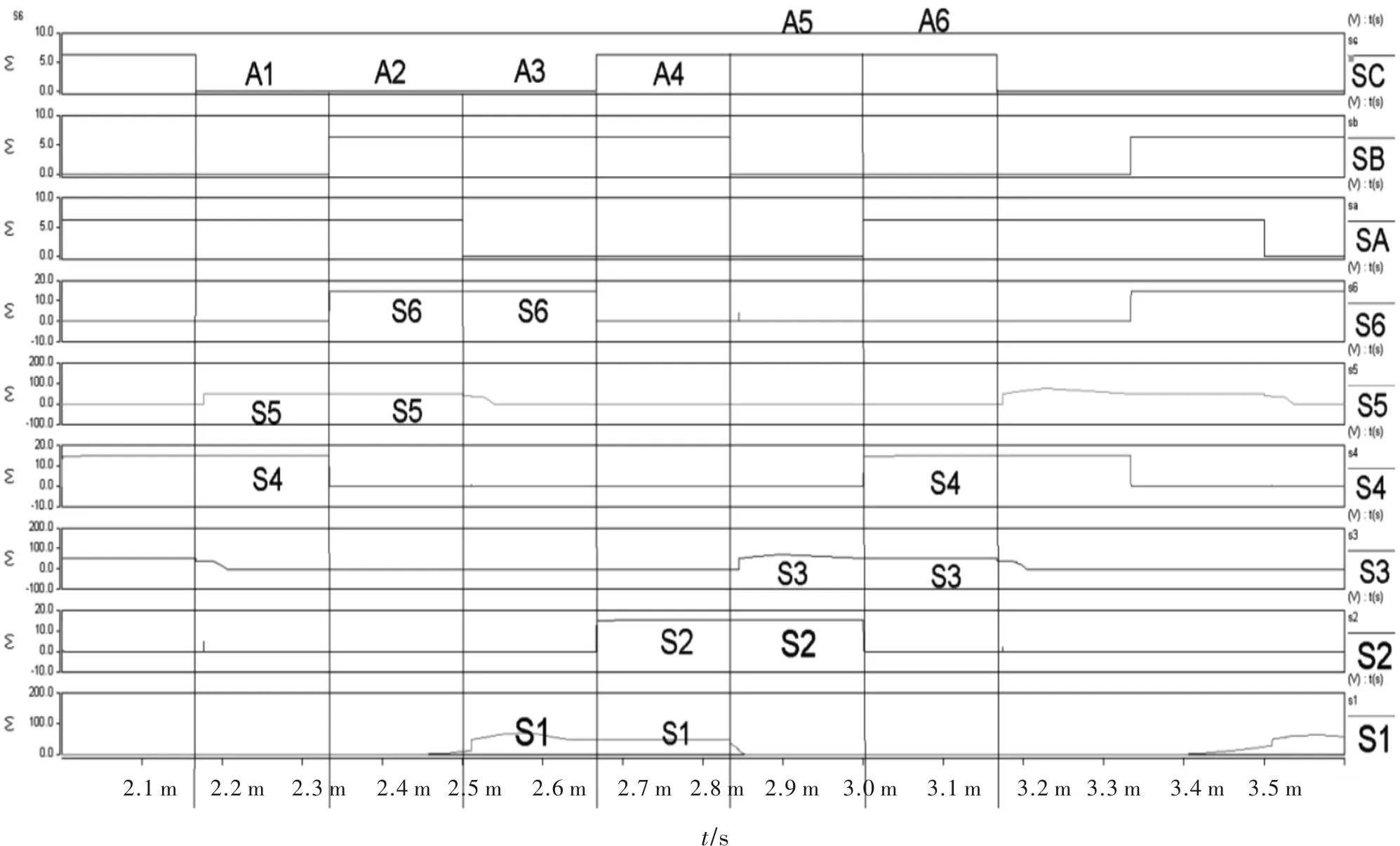
图2 顺时针运行开关管导通仿真波形

表2 开关管状态逻辑
1.2 仿真分析
根据表1、表2可知在同一位置时由于电机旋转方向相反,对应绕组电流回路方向正好相反,综上所述,霍尔效应传感器的逻辑电平设计应考虑以下几个方面:
(1)对于不同旋转方向要求的电机,霍尔效应传感器包括安装方向和分布次序应设计出不同的驱动逻辑电平。
(2)每个霍尔在电气周期内产生180°的高、低电平信号,依次分布的3个霍尔可产生6个位置电平信号,每隔60°改变一次电机绕组驱动电流回路。
(3)霍尔电平信号与逆变器开关管状态逻辑的变化应符合电机绕组通电电流回路要求,电机绕组相序应依次连接,不得混淆。
2 数学模型
2.1 机械角度与电气角度的关系
目前无刷直流电动机的位置编码器结构多是在电机转子轴上安装副磁极(主磁极也可),电机后端盖安装位置编码器,根据MC33035[4]关于传感器相位比较可得:
(1)
式中,p为电机极对数,θ为霍尔效应传感器机械角度,φ为电气角度。通常三相六阶BLDC霍尔效应传感器包含3个霍尔传感器,按120°/240°(或60°/300°)电气相位依次设置,霍尔效应传感器电气角度φ为360°。所以,霍尔效应传感器机械角度θ可得:
(2)
(3)
2.2 运动与电平信号的变化
无刷电机是靠控制器在适当位置给电机的相线圈通电,产生旋转磁场,使电机转子随旋转磁场而旋转。当霍尔元件在N极和S极时所产生的电平是不同的,霍尔元件中心从磁钢的一个N极通过磁钢分界线进入另外一个S极时,就在通过磁钢分界线的“瞬间”,霍尔元件输出相反的电平,用这个电平去控制驱动电机,使无刷电机通电线圈的通电方向改变,从而达到电机电子换相的目的[5]。
每个霍尔产生高低2个电平,电机3个霍尔组成的传感器,相邻电气角度为120°时,电机旋转电气位置有6种组合,这与“二相导通星型三相六状态”对应。由于电机转子或感应磁极成对均匀分布(空隙可忽略),霍尔正常供电,在任意圆周位置会产生一个高或低的电平。当其中一个霍尔跨过电气周期布置时,由于触发霍尔开关的变化磁极区域极性及两者相对位置并未变化,故移动前后的电平信号仍保持一致。以3对极BLDC电机说明。
图3所示,由式(2)、式(3)分别可得3对极BLDC一个电气周期对应的机械角度θ为120°,两个相邻霍尔间的机械角度δ为40°,电机逆时针旋转。当正常供电时,H1~H3霍尔均会产生一个高或低的电平信号。当相对H1按电气周期逆时针120°机械角度分布另一霍尔H1′时,此时H1′感应磁极为N2、S3临界区域,H1感应磁极为N3、S1临界区域,触发两个霍尔开关的变化磁极区域极性一致,即布置的H1与H1′霍尔输出电平信号并无区别;可通过试验示波器观测,此处不作说明。

图3 3对极BLDC霍尔分布图
因此,依次布置的电气相位间隔δ的每个霍尔均可按电气周期的整数倍Z沿圆周布置,该霍尔输出电平信号与位置变化前后保持一致,且与电机旋向无关。该结果可灵活设计霍尔布局以适应结构设计需要。
2.3 数学模型的建立
当霍尔效应传感器沿圆周及电机旋转方向布置霍尔H1~H3时,若此时H1~H3霍尔间隔δ且电平信号与3对极BLDC的Back_EMF一一对应,定义H1为参照零点,即H1初始布置电气相位为0°,则H1~H3霍尔初始电气位置如图4所示。
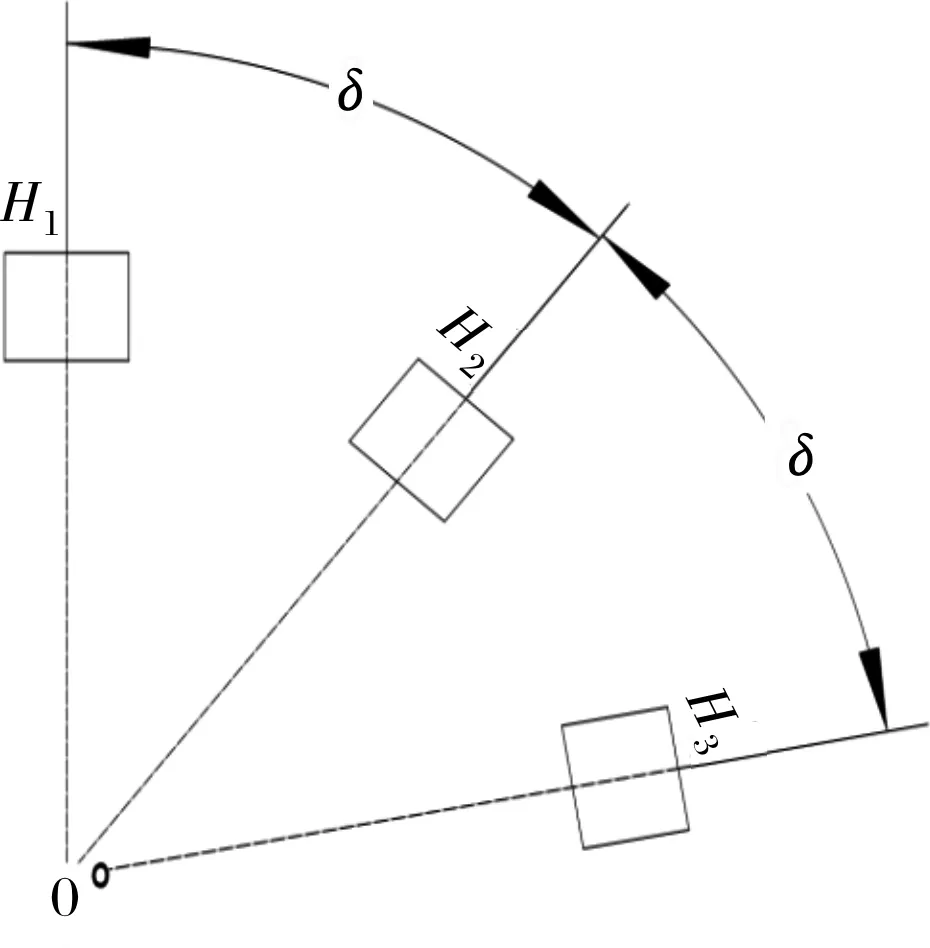
图4 H1~H3霍尔初始电气位置
由式(2)、式(3),令H1~H3沿顺时针(定义正方向)依次分布,若考虑每个霍尔可按电气周期的整数倍Z布置,则相对应机械角度H1、H2、H3与电机极对数p应符合下列关系式:
(4)
3 霍尔效应传感器设计
3.1 安装和布置要求
霍尔效应传感器的主要作用是识别电机绕组相位位置信息转换为电信号,驱动器通过读取霍尔元件的输出端电平信号,得到转子的位置信息,逻辑开关根据电机的转子位置信息完成正确的换向,给电机对应绕组通以电流,形成气隙旋转磁场使电机不停地运转。
在无刷直流电机运行过程中根据电机类型不同可选择多个霍尔位置传感器组合使用,为了能够准确的测量得到电机转子在每个换向电气周期内的位置信息。霍尔位置传感器的布置应满足以下要求:
(1)在一个电气周期内,霍尔传感器所产生的开关状态不能重叠。
(2)每一个电气周期,霍尔高低电平所占的电角度应该相等,即为180°。
(3)每个霍尔电平信号与电机的其中一个绕组内感生的反电动势相位对应。
(4)霍尔元件在每个电气周期所产生的开关状态数与电机的工作绕组电流回路数相对应。
(5)霍尔沿圆周分布应确保安装精度。
(6)对于功率和电枢电流较大情况,不宜将霍尔直接安装在主定子铁芯的端部,以免霍尔电平信号失真。
3.2 霍尔效应传感器的精度
(1)精度的影响因素
影响霍尔传感器测量精度的因素有敏感区域、元件材料、温度、不等位电动势、寄生直流电动势、环境干扰等[6]。此处主要对霍尔敏感区域的影响进行探讨。
(2)敏感区域
通常,霍尔效应传感器设计有一个敏感点区域,其为边长a=0.4 mm~0.6 mm的正方形面积。当沿圆周分布的半径R或两个相邻霍尔间的机械角度δ较小时,此敏感点区域会影响到霍尔信号触发的精度,即无法保证相邻两个霍尔的触发电气角度为120°/240°或影响到1.2中所述每步的驱动间隔60°。图5所示,分别按弧长和角度讨论。
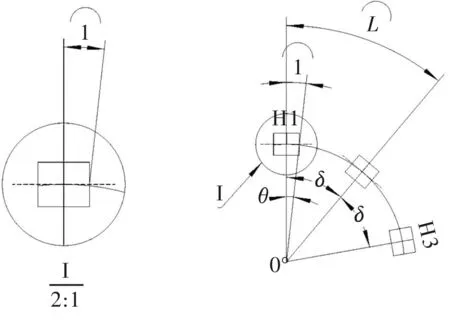
图5 示意图
(a)从弧长考虑
若定义霍尔弧长对每一步BLDC驱动的识别精度为ρ,则可用下式表达:
(5)
式中,l(此处近似为a/2)为霍尔H1对应的弧长,L为机械角度δ或每步的驱动间隔电气角度60°对应的弧长。沿圆周分布时,可得:
(6)
式中,δ′为对应δ的弧度换算,R为霍尔分布半径。经过实践证明:ρ在3%以内可达到较好的效果,但不宜高于5%,取a=0.5 mm,联立式(5)、式(6)可得:
(7)
(b)从角度考虑
依据式(7)可得θ=l/R,若定义霍尔弧度对每一步BLDC驱动的识别精度为ρ′,则:
(8)
式中,θ为弧长l对应的角度。若ρ′在3%以内,经变换后同样可得式(7),此处不再累述。
(3)δ与半径R关系
将ρ=3%,ρ=5%分别代入式(8)解得分布机械角度δ与半径R关系表达式:
若ρ≤3%,则δ*R≥956
(9)
若ρ≤5%,则δ*R≥573
(10)
对于3对极电机,根据式(3)可得δ=40°,则霍尔的分布半径R由式(9)可得R≥23.9;R由式(10)可得R≥14.3;单位均为mm。识别精度ρ要求越高,则分布半径R越大。
3.3 布局设计
根据式(4)建立的数学模型可知,对于三相BLDC霍尔效应传感器来说,若极对数p不变,3个霍尔H1~H3的布局设计并不完全是唯一的,说明如下:
(1)p=1,则Z1~Z3均为0,H1=0°、H2=120°、H3=240°。
(2)p=2,若考虑依次布局有4种组合;若不考虑依次分布则有23种组合的布局设计。如表3所示。

表3 霍尔效应传感器的布局(p=2)
由于各相转矩曲线的交点正是换向的最佳位置,位置传感器就应该安装在该位置,按表3确定布局后,以任一霍尔电角度对其相应通电相的定子磁场中心线的30°位置作为基准,就可依次分布另外2个霍尔。
3.4 霍尔类型及特点
电机的控制均离不开转子位置信息。位置传感器是工程中最常用的位置检测装置,其环境适应性及检测精度将直接影响电机控制的各项性能。由于BLDC并不需要精确位置信号,可采用开关型霍尔集成电路进行霍尔传感器设计。
霍尔开关集成电路又称霍尔数字电路,由稳压器、霍尔片、差分放大器、斯密特触发器和输出级组成;输入为磁感应强度,输出为数字信号;封装有引线式和表贴式。霍尔开关器件无触点、无磨损、输出波形清晰、无抖动、无回跳、位置重复精度高(可达μm 级),分为普通霍尔开关和锁定型霍尔开关,具有结构牢固、体积小、重量轻,寿命长,安装方便,功耗小,频率高,耐震动,不怕灰尘、油污、水汽及盐雾等的污染和腐蚀[7]。
3.5 印制板电路设计
霍尔输出一般是一个集电极开路的NPN管,作开关使用,分布在PCB上,考虑到允许的最大电流,通常选择1 kΩ~5 kΩ上拉电阻。为了得到较好的去耦合效果,可为每个霍尔配置一个0.01 μF的陶瓷电容器;考虑到开关时的脉动电流变化,在每个霍尔的电源线和地线间直接并联接入去耦电容[8]。

图6 PCB电路图
4 结 论
本文基于Saber阐述了电机霍尔效应传感器应用的工作原理,建立了霍尔机械角和电气角度对应的数学模型。通过数学模型,结合霍尔元件敏感区域对识别精度进行分析,得出传感器机械角度及霍尔半径的分布表达式;提出包含布局和电路要求等的设计要点。该结果可作为BLDC霍尔效应传感器的设计规范,也可作为电气传动位置传感器的设计参考。
猜你喜欢
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
电测与仪表(2016年22期)2016-04-12 00:19:58
云南电力技术(2015年2期)2015-08-23 01:31:52
太空探索(2015年6期)2015-07-12 12:48:42
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
电测与仪表(2014年7期)2014-04-04 12:09:32
