
核岛安装电缆敷设装置的研究
2022-08-02 08:42夏君余贵峰
城市建设理论研究(电子版) 2022年20期
夏君 余贵峰
中国核工业二三建设有限公司 北京 101300
1 引言
在建安行业中,作为电气安装部分工程主要分项的电缆敷设工程,因受敷设条件、工具设备适用性和机械化装备水平等条件影响,普遍存在人力投入量大、施工效率低、工程质量(尤其是观感质量)不高的问题,电缆在敷设过程中存在损伤、扭绞和因应力得不到释放而导致电缆排列混乱的情况。
国内电缆敷设工程,除特种电缆工程(海底光缆等)、国家重点工程等大型新建工程外,大多数施工的技术、装备水平及机械化施工水平不高,电缆的敷设方式以人工展放为主。在以往的工程施工中,通常需要敷设大量的连接电缆用于控制和保护装置中信号、模拟量与指令的传输,工程量很大,会耗费大量人力物力财力,会大幅提高基建工程成本。为解决施工中电缆敷设问题,我国先后采用卷扬机、电动转盘机转动电缆盘配合电动葫芦牵引电缆、机械手拉电缆机、滚动摩擦牵引机等来实现机械代替人工。现阶段大都以电缆半自动化敷设为主,尽管当前在大截面的电缆敷设时有卷扬机和电缆输送机作为电缆敷设的辅助工具,对电缆敷设效率和安全性有所提高,但是采用卷扬机和输送机进行电缆敷设效率依旧较低[1]。
随着装置设计水平和制造精度的不断提高,多自由度、高灵活性、高重复精度的装置开始大量进入工业领域,受到市场的关注和欢迎。自动敷设装置在电缆施工工程上的成功应用带来了前所未有的机遇。自动敷设电缆装置施工突破了传统的电缆敷设方式,开拓了一种创新的柔性自动化生产方式,从而提高电缆敷设质量和效率,保证敷设准确性和可靠性。
2 电缆敷设难点介绍
在某核电项目建安工程中,厂区内环境复杂,桥架标高不一致,除直段桥架外还存在转弯桥架,现场建筑地面存在集水坑,敷设装置跨越集水坑需要人工辅助,或者做辅助工装,增加了敷设装置自动化行走难度;对于较大的厂房,敷设装置无法固定自身,自身重量及四个轮子与地面摩擦力又无法满足牵引电缆的牵引力,敷设装置的自动化放线牵引作业也难以完成。不同规格的电缆对应的单位长度(m)的电缆重量不一样,电缆敷设装置必须考虑电缆的直径和重量,电缆的直径直接决定线缆头套的尺寸,电缆的重量决定电缆敷设装置输送动力,如何使电缆敷设装置适应不同规格电缆的外径和电缆单位长度重量也成为制约现阶段自动化敷设的主要问题。上述问题已成为现阶段制约自动敷设电缆模式下施工活动开展的主要问题。
3 电缆敷设装置的设计
3.1 总体设计需求
电缆敷设装置的结构设计需要与核岛厂房房间结构相匹配,本次设计适应管廊高度3m至4m、通行宽度不小于0.9m的环境,直径范围在(10.0-58mm)内电缆在桥架中自动敷设。应满足不同层级的电缆敷设要求、多种规格电缆装夹可调自适应、拖拽过程中的钢丝绳位置规整,实现自动化移动敷设电缆,减少机器搬运次数,减少人力[2]。
3.2 电缆敷设装置的整体结构设计
电缆敷设装置组成如下:1、全向移动底盘;2、伺服牵引装置;3、锚定固定装置;4、悬臂式升降装置;5、控制单元,如图1所示。
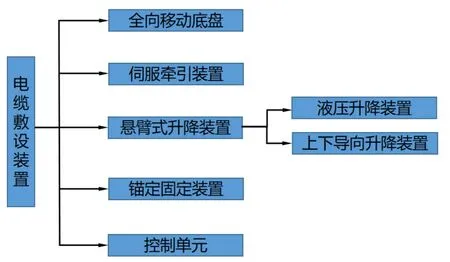
图1 电缆敷设装置系统组成
电缆敷设装置底座上部放置电池,端部上方设置声光报警系统,底座的顶撑支撑内部设置锚定固定装置,锚定固定装置分为二级顶撑,顶撑动作由上固定液压装置和下固定液压装置完成,顶撑力由综合液压站提供。悬臂式升降装置固定在底座的顶撑支撑侧部,附带有卷扬机布置在底座上方。牵引送线装置设置在悬臂式升降装置上,可根据悬臂式升降装置上下移动连接电缆敷设。
3.3 敷设装置主要部件的详细设计
3.3.1 全向移动底盘设计
全向移动底盘采用自适应扭转悬挂结构,由底座和行走装置组成。底座为电缆敷设装置机体结构装置,由钢板组焊而成,外形呈“T”型构造,包括顶撑支撑、连接板、主钢梁、顶撑座、万向轮座、液压臂支座。其中主钢梁为支架结构主体,呈对称镜像竖直布置[3],中间部位连接顶撑支撑,顶撑支撑侧壁中间位置焊接连接板,连接板用于护罩连接,顶撑支撑外侧下方靠近主钢梁位置处设置有液压臂支座。主钢梁下方外侧连接顶撑座,主钢梁端头下方设置万向轮座。
行走装置包括全向轮和驱动电机,对称设置有4组作为运动单元,每组轮系由单独的伺服驱动系统驱动控制。全向轮设置在底座端头,与驱动电机通过万向轮座连接,驱动电机布置在底座底部的凹槽内。
3.3.2 伺服牵引装置设计
伺服牵引装置主体为支臂、送线装置、连接套、延伸臂、销轴、保护套、束线器,主要完成线缆的牵引敷设工作。支臂为方形框架结构,由支架、调节杆、托臂构成。托臂分上下两片布置,其内部设置有送线装置,送线装置为圆柱构造,中间设置有凹槽。托臂端头设置有延伸臂,延伸臂为薄片连接件,一端连接于托臂上,一端连接于连接套上。连接套为圆管构造,设置在延伸臂上,包覆在延伸臂内部。销轴为圆柱构造,一端连接钢丝绳,另一端连接束线器。销轴外侧设置有保护套,包覆在销轴和束线器之间。束线器由吊耳和钢丝套,吊耳呈圆环状,设置在销轴的端部,与销轴挂接。

图2 钢丝绳卷扬机
3.3.3 锚定固定装置设计
锚定固定装置主要由上固定液压装置、下固定液压装置、距离检测传感器装置、综合液压站、承压板组成。上固定液压装置,主要由二级液压缸、溢流阀、电磁换向阀、油管组成。下固定液压装置,主要由四个单级液压缸、溢流阀、电磁换向阀、分流阀、油管组成。综合液压站主要由油箱、液压泵、阀体组、油管、直流动力源。
3.3.4 悬臂式升降装置设计
悬臂式升降装置,包括液压升降装置、上下导向升降装置、拉伸调节装置、举升链轮、旋转悬臂、卷扬机。该工装由升降装置、转动轴装置和拉伸调节装置三部分构造而成,其中升降装置包括液压升降装置和上下导向升降装置,转动轴装置包括举升链轮、旋转悬臂、卷扬机及上下导向升降装置。
3.3.5 控制单元设计
电气系统由敷设装置控制系统、充电系统组成。敷设装置系统包括敷设装置状态监视、运动控制、放线速度匹配计算、激光雷达避障处理、电池电量监测、逆变电路等。充电系统主要为敷设装置提供智能便捷的充电功能。
4 电缆敷设装置仿真分析
4.1 仿真状态说明
4.4.1 伺服牵引装置仿真状态说明
伺服牵引装置主要完成线缆的牵引敷设工作。驱动动力采用伺服电机与行星减速器组合,控制精度高,输出牵引力大小可控,输出最大扭矩可达2100Nm。钢丝绳采用8mm直径304不锈钢材质,在潮湿环境下抗氧化能力强。送线装置和销轴构成了钢丝绳辅助机构,一对送线装置上的凹槽结构之间的空隙,可有效规整钢丝绳形态,使钢丝绳与支臂间形成固定范围夹角,防止钢丝绳打结,销轴端部连接钢丝绳,收紧后与送线装置有固定距离,避免钢丝绳端部固定后收紧状态下与送线装置碰撞。连接套设置在支臂上,与支臂间有旋转轴相连接,可在销轴处于送线装置远端时,避免钢丝绳与支臂缠绕。支臂包括支架、调节杆、托臂,调节杆套装在支架内,可调节相对位置,使电缆输送过程不易受到阻滞和干涉现象。通过驱动调节电缸活塞杆伸出距离的长度来控制放线拉杆的角度,从而可适应不同高度的线缆敷设作业。
按照目前人工敷设案例,电缆规格为HDYJE-K3-0.6/1KV-3*185+2*95,外护套直径为58mm,无铠装层,允许牵引,牵引力为5daN/mm2,铺设1300米长度电缆需要人工13人、耗时16h,计算敷设速度是平均0.0226m/s。伺服牵引装置设计输出最大牵引速度可达0.2m/s,最大牵引力可达15000N,整个过程中只需2-3名操作人员,从此数据看,敷设装置敷设效率要大于人工敷设效率,敷设装置敷设成本低于人工敷设成本。
4.4.2 锚定固定装置仿真状态说明
当电缆敷设装置运动到作业指定点后,距离检测传感器装置开始检测当前位置与管廊顶面的距离是否在上固定液压装置活塞杆的行程内,当确定满足锚定要求后,距离检测传感器装置传送信号至综合液压站,综合液压站中的电磁阀接收到信号后作出动作,首先控制下固定液压装置活塞杆伸出,机体被抬升,使全向轮离开地面后,上固定液压装置活塞杆伸出,直至与管廊顶面接触。当综合液压站油压压力检测器检测到压力标定值后,使整个液压系统处于保压状态,此时全向移动底盘悬空,全向轮离开地面,可以开始进行电缆拖曳作业。电缆敷设装置依靠上、下固定液压装置的双向顶升,把电缆敷设装置本体固定在管廊内。作业开始前,锚定整个过程在10s 内完成;作业结束后,在6s内释放锚定和回收油缸,继续进行下一段电缆敷设任务。
为了场景适应需求,电缆敷设装置底盘上的固定油缸支持快速拆装,可更换为不同行程的油缸,以满足不同管廊高度。液压缸活塞杆在第一级液压缸顶升后未触到管廊顶面,第二级液压缸继续顶升至活塞杆触到管廊顶面,可适应不同高度的管廊顶面。四个单级液压缸的底部分别设置在敷设装置全向移动底盘上的承压面板四个角上,以上固定液压装置的二级液压缸为中心对称分布,使每一个液压缸所受外力相等,当四个液压缸活塞杆伸使装置全向轮离开地面时,机身保持平稳。四个液压缸通过分流阀使用单独的子油路控制,每个子油路中均设置了溢流阀作安全阀,工作原理与二级液压缸溢流阀工作原理一致[4]。
4.4.3 悬臂式升降装置仿真状态说明
悬臂式升降装置利用升降原理和转动轴原理制作而成,充分发挥了二者结合的优越性。升降装置可以通过液压升降和滑动升降实现了不同高度层级电缆的敷设,在油缸活塞杆顶部装有链轮安装轴,链轮安装轴两端装配举升链轮,利用链轮安装轴和举升链轮将上下导向升降装置送至不同高度,满足不同层级的电缆敷设。
上下导向升降装置由上下导向柱和上下导向板组成,上下导向柱两端加设轴承使其具有旋转性,上下导向板利用导向套与导向柱相连接,形成一套旋转系统。转动装置增加了悬臂的灵活性,实现了悬臂方向和角度的调整,解决了电缆托盘轨道多轴向敷设的需要。
拉伸调节装置是利用套筒的方式制作而成,可以根据现场实际需要对悬臂放线距离进行调节。利用长短的调节性延伸悬臂的敷设距离,使其能够快速调节至平衡状态,以最优的模式完成多种环境的敷设任务。
卷扬机利用伺服驱动动力装置带动齿轮来控制牵引钢丝绳的长短,从而控制电缆与悬臂之间的距离完成敷设任务。
4.4.4 控制实现方式
控制器通过总线通信控制敷设装置前后移动、伺服牵引装置和锚固钉装置动作,系统离散信号接入采集模块,采集模块与控制器采用总线通信。通信连接示意图如图3所示。

图3 通信连接
距离检测传感器装置,作为电缆敷设装置控制系统的一部分,其中垂直测距探头设置在电缆敷设装置壳顶。以便探测上固定液压装置活塞杆顶板与管廊顶面的距离,使用前设定好距离值,当探测到的距离符合锚定固定装置的工作条件时,将信息反馈回敷设装置控制中心,电缆敷设装置停止前进,然后锚定固定装置开始工作。直流动力源给液压泵输入动力,液压泵启动,为上固定液压装置和下固定液压装置供油。油箱通过油管向组合阀体供油,依次连接单向阀、电磁换向阀、顺序阀,再连接上固定液压装置和下固定液压装置的电磁换向阀,液压油通过回流管再次回到油箱,实现循环利用。综合液压站接收距离检测传感器装置的信号后作出应答,电磁阀动作,进行液压系统输油和回油操作。
5 电缆敷设装置的应用
本文所述的电缆敷设装置已在某核电工程建设中进行应用,目前,敷设装置电缆敷放过程作业人员相比较人工电缆敷设减少80%,并且不直接参与拖拉电缆的体力劳动,有效的保证安全,施工风险得到了有效的控制。
1)电缆敷设装置开机自检通过后。敷设装置可以接收作业任务。任务下达后,由人工将被牵引敷设的电缆与伺服牵引装置线缆连接套进行连接固定;2)电缆敷设装置按照任务要求行驶。在前进过程中,运动控制系统根据导航避障单元的感知信息,进行全向移动底盘的控制。并同时控制伺服牵引装置,根据行进距离同步释放牵引钢丝绳。到达指定牵引位置后,锚定固定装置依靠液压缸伸出活塞杆进行车体固定。为牵引做好准备;3)伺服牵引装置启动工作。在电缆导向辅助工装的支撑下实现牵引。牵引过程中可通过读取称重传感器数据对牵引力实时进行监控。管廊外的线缆供应辅助装置,配合电缆敷设装置同步进行线盘放线工作;4)电缆敷设装置根据任务是否完成,是否穿越防火架等情况,进行逻辑处理。进行必要的以上步骤重复直至任务完成;5)当电缆敷设装置到达防火墙时,由于空间有限无法穿越,装置自动识别防火墙障碍,断开电缆头套,敷设装置自动移动到防火墙另一侧,由人工把电缆放进电缆套里,电缆套自动识别锁紧,继续进行牵引工作;6)当电缆敷设装置完成一盘线缆敷设施线后,由操作人员远程遥控敷设装置返回到敷设施线原点,再次进行线缆敷设,依次重复进行线缆敷设施线。
6 结语
电缆敷设装置的设计解决了核厂房空间内小规格电缆牵引式敷设和廊道受限空间内电缆自动化敷设问题,同时解决了人力投入量大、施工效率低、工程质量不高的问题。电缆敷设装置的设计可以在类似的核电建造电气安装部分的电缆敷设工程中进行推广。
猜你喜欢
沈阳理工大学学报(2022年3期)2022-08-11
廉政瞭望·下半月(2022年4期)2022-05-12
港口装卸(2022年1期)2022-03-10
北华大学学报(自然科学版)(2021年3期)2021-07-13
今日农业(2021年2期)2021-03-19
房地产导刊(2020年8期)2020-09-11
中南大学学报(自然科学版)(2020年6期)2020-07-16
摄影之友(影像视觉)(2017年11期)2017-11-27
科技创新与品牌(2017年9期)2017-10-20
三联生活周刊(2017年1期)2017-01-11
