
GEO超大口径相机遮光板与卫星姿态控制联合设计
2022-08-02 14:08洪振强宋效正陆国平饶启龙夏远镜
空间控制技术与应用 2022年1期
洪振强,李 鉴, 宋效正, 刘 伟, 陆国平, 饶启龙, 夏远镜
上海卫星工程研究所, 上海 201109
0 引 言
近年来,地球静止轨道(GEO)超大口径高分辨率光学成像卫星是各国高分辨率遥感卫星的研究热点.为了实现超高分辨率,相机口径超过3 m,十分接近卫星平台外包络.GEO卫星相比于低轨高分辨率光学成像卫星具有长期驻留于赤道上方与地球自转同步运行的特点,非常利于对固定区域的长期连续成像[1-2].为保证超大口径光学遥感相机正常成像,需通过外遮光罩实现对太阳杂散辐射和太阳外热流入侵的抑制[3].但是,由于星、地、日几何关系的约束,GEO大口径光学成像卫星存在午夜直照问题,在星下点地方时午夜前后太阳光将直照相机内部,降低探测效果[4].在轨杂光进入光学成像仪视场,将造成图像背景复杂[5],甚至导致在该段时间内相机无法工作[6].文献[7]研究了一种随动可展开的异形遮光罩技术,有效地解决太阳引起的杂散光和热流量问题,但该方案展开技术复杂,对材料、工艺、展开机构要求高,质量资源占用多,在轨展开可靠性较低.美国的SBIRS-GEO卫星使用了可展开式遮光板对红外相机进行保护[8],我国的高分四号[9-11]设计了主遮光罩及挡光环、蜂窝结构的次镜遮光罩、中心消光筒及挡光环、杜瓦内多级冷屏等杂光抑制结构,但二者相机口径(<1 m)远小于现阶段研究的超大口径(>3 m)光学成像系统.文献[12]研究了欧美GEO高分光学成像技术的发展,表明超大口径相机对可展开式大型遮光板方案的研究十分迫切.文献[13]提出了一种通过姿态机动实现太阳和月亮的规避的新思路,实现了弹载捷联星敏感器的强光规避.本文根据超大口径光学相机工作需求,综合分析在轨工作模式、太阳光入射角、杂散光干扰以及运载火箭包络限制等因素,对相机遮光板联合姿态控制策略进行交叉学科设计,给出了遮光板结构优化设计方法、最优姿态偏航导引律和在轨业务运行策略,并进行了数学仿真.
1 有限特征点离散化分析方法
遥感卫星在轨业务成像期间,为保证成像质量,需要满足相机主镜、次镜、内遮光罩内壁均不受阳光直照,其中,内遮光罩内壁由于尺寸大,最易受到阳光直照.因此,文中以相机内遮光罩内壁均不受阳光直照为约束条件,进行相机遮光板设计.为了保证对各向太阳入射光线的覆盖,以3.5 m口径光学相机为例,将相机内遮光罩的边缘和遮光板边缘进行有限特征点处理,遮光板初始高度设定为光学口径的两倍,即7 m.为了适应运载包络并且便于在轨展开,初定方案由3块遮光板构成,每块遮光板尺寸为12 m×2 m,如图1所示,以此作为迭代优化的初始设计.图中,坐标系OXYZ为遮光板参考坐标系,三轴方向与卫星本体坐标系平行,原点位于相机内遮光罩顶部圆心,Z轴为卫星指地方向,Y轴垂直轨道面(正飞姿态下朝南,掉头飞行姿态下朝北).

图1 遮光板边缘和内遮光罩边缘有限特征点离散化示意图
设太阳初始在卫星的-X方向,以夏至当天为例,以绕Y轴正转为正.设遮光板边缘共有M个特征点,内遮光罩边缘共有N个特征点,将这两部分特征点间两两连线,可得M×N个特征向量,根据特征向量与太阳矢量的夹角大小即可得知内遮光罩边缘的特征点是否受照,只要保证内遮光罩边缘的特征点不受照,即可保证内遮光罩内部不受照,具体分析方法如下:
设特征向量Pij,ij表示遮光板边缘上第i个特征点与内遮光罩边缘第j个特征点相连得到的矢量,方向从内遮光罩边缘的特征点指向遮光板边缘上的特征点,该向量在卫星本体坐标系中可表示为

(1)
设t时刻卫星本体系相对轨道系的滚动角、俯仰角、偏航角分别为φ、θ、ψ,以2-1-3为转序,t时刻特征向量在轨道系下可表示为
(2)
以轨道系为参考坐标系,设在初始时刻,“卫星-太阳”矢量位于轨道系的XOY平面内,可表示为

(3)
其中αs为“地心-太阳”矢量与轨道面(对于地球静止轨道卫星,即为赤道面)的夹角.由于卫星到太阳的距离远大于卫星到地心的距离,因此在本文分析中,可将“地心-太阳”矢量与“卫星-太阳”矢量等价处理.卫星在轨以轨道系为参考,在惯性空间以轨道角速度作旋转运动,设t时刻卫星绕轨道系OY轴转动角度为φ,则该时刻“卫星-太阳”矢量的单位向量在轨道系中可表示为

(4)

图2 有限特征点对应特征向量示意图
2 姿态偏航偏置导引律
对第一节提出的初始设计方案进行优化设计,在满足遮光效果的基本前提下,优化遮光板尺寸.对于GEO卫星,太阳高度角(“地心-太阳”矢量与卫星轨道面的夹角)存在周期性年变化,根据太阳高度角(±23.5°)进行卫星姿态偏航偏置可有效减小遮光罩宽度.GEO卫星的轨道周期为一天,在一天内,太阳高度角变化约0.2611°,因此在一天内可将其视为常值,且采用固定偏航偏置控制可简化控制算法,保证成像稳定度.卫星业务运行期间以轨道坐标系为基准坐标系,若卫星不进行偏航偏置,则“卫星-太阳”矢量与卫星本体系XOZ平面的夹角即为当天太阳角.将太阳遮光板安装于卫星本体的-X面,遮光板外形关于卫星本体系XOZ平面对称.为了尽可能减小遮光板面积,应通过偏航偏置一定角度使得“卫星-太阳”矢量与卫星本体系XOZ平面的夹角在一个轨道周期内变化范围最小且正负极值互为相反数.
设t时刻,“卫星-太阳”单位矢量在轨道坐标系中的表示为

(5)
如图3所示,定义星下点时间18:00时卫星绕轨道系Y轴转动角度φ为0°,向东为负,向西为正,一个轨道周期内φ的范围为-180°~180°.

图3 “卫星-太阳”单位矢量与卫星轨道系和卫星本体系的几何关系示意图
根据第一节推导结果,可知轨道系中“卫星-太阳”单位矢量随时间的变化可表示为

(6)
设卫星偏航偏置角为ψ,卫星滚动角和俯仰角均近似为零,可得偏航偏置后在卫星本体系中“卫星-太阳”单位矢量可表示为

(7)
从而可得t时刻“卫星-太阳”单位矢量与卫星本体系XOZ平面的夹角为
Ω(t)=arcsin(Sby)=arcsin(cosαscosφsinψ-
sinαscosψ)
(8)
式(8)中包含φ和ψ两个变量,其中,φ的变化范围为-180°~180°.
为了实现遮光板面积最小,需保证一个轨道周期内“卫星-太阳”矢量与卫星本体系XOZ平面夹角最小值(偏向本体系-Y轴)和最大值(偏向本体系+Y轴)互为相反数.考虑到GEO卫星轨道运动的日周期重复性,结合卫星轨道运动规律可知,在星下点时间18:00(或6:00)和星下点时间00:00(或12:00)对应的Ω(t)互为相反数,将φ=0°和φ=90°代入“卫星-太阳”单位矢量与卫星本体系XOZ平面的夹角计算公式,可得
cosαssinψ-sinαscosψ=sinαscosψ
(9)
式(9)仅包含太阳高度角和偏航偏置角两个变量,简化得
tanψ=2tanαs
(10)
最终得到卫星最优偏航偏置角ψ的计算公式为
ψ=arctan(2tanαs)
(11)
以夏至为例,有αs=23.5°,可得夏至对应的最优偏航偏置角为41.011°,对应的“地心-太阳”单位矢量与卫星本体系ObXbZb平面的夹角的绝对值随卫星轨道运动的变化曲线如图4所示,最大值为17.511°.
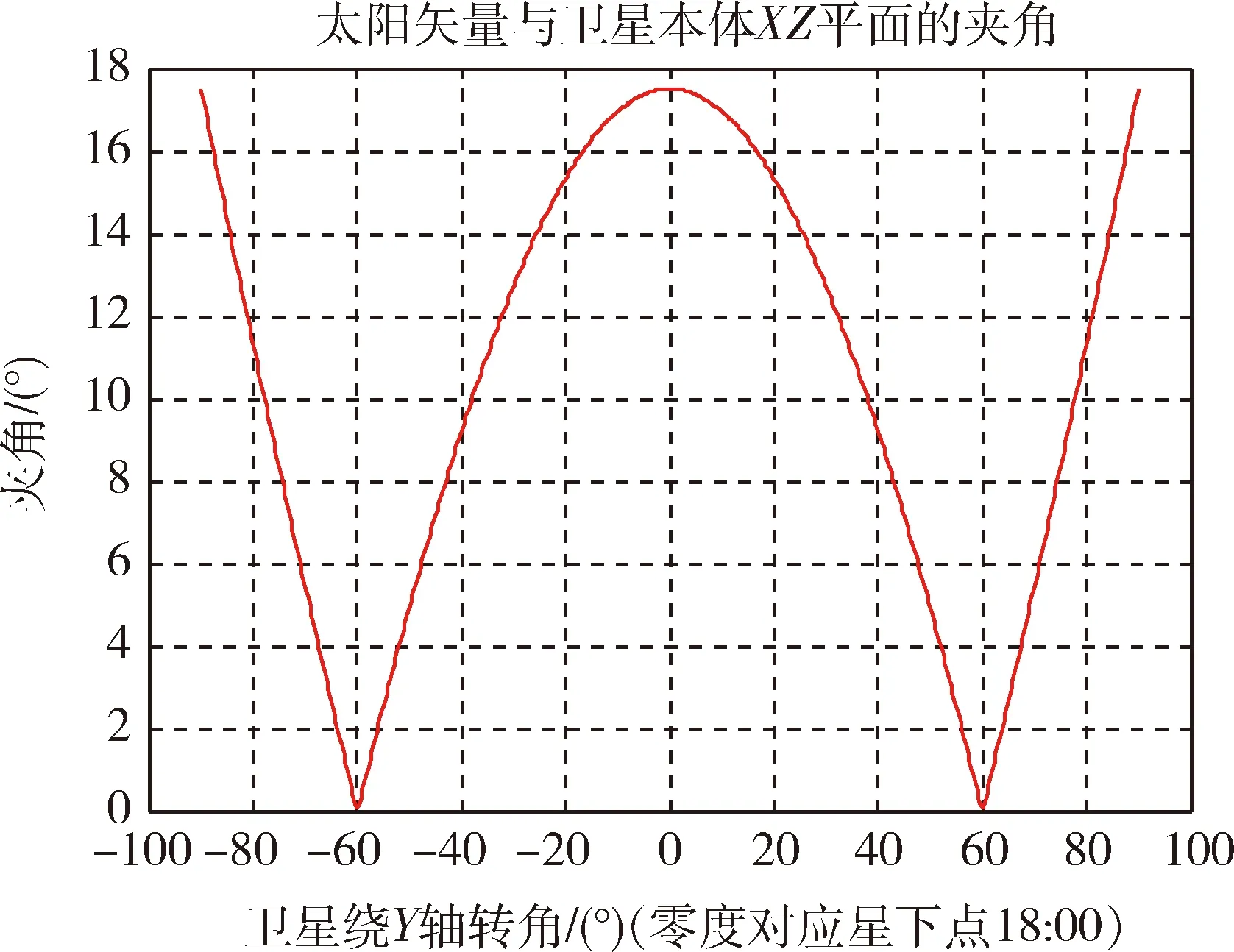
图4 夏至日卫星偏航偏置后应太阳矢量与卫星本体XOZ平面夹角绝对值的日变化
3 遮光板结构设计
根据最优偏航偏置角的计算结果,夏至和冬至附近的偏航偏置角为41.011°,对应“卫星-太阳”单位矢量与卫星本体系XOZ平面的夹角变化幅值为17.511°,达到年变化极值.为了适应运载火箭整流罩包络,需要减小收拢状态遮光板宽度,并且确保展开过程简单可靠,因此初步考虑将遮光板设计三板折叠式,并将两侧遮光板进行折弯展开(而非三板共面),以提高遮光效率,沿卫星+Z向视图如图5所示,图中,β=17.511°.
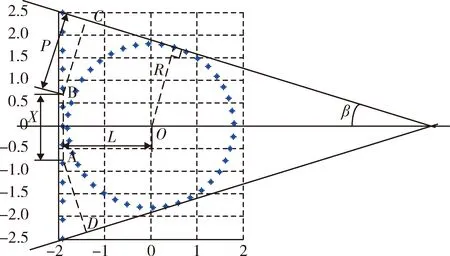
图5 遮光板与相机内遮光罩几何关系图
1)板宽设计

W=X+2(Lsinβ+R)-Xcosβ
(12)
从而可得

(13)
式(13)意味着中间板宽越小则遮光板总宽越小,即遮光罩整体质量越轻.其极限情况即缩减为与内遮光罩相切的两块遮光板,总板宽最小,最终遮光板横截面如图6所示.收拢状态通过四处压紧点与内遮光罩固连,在轨通过火工品解锁为展开状态,与内遮光罩无接触.
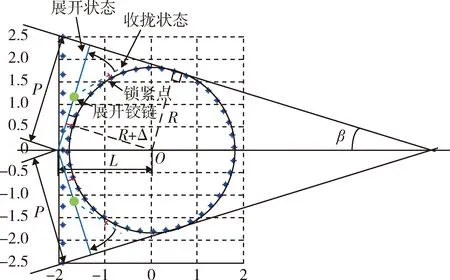
图6 优化设计后遮光板截面图
设遮光板距离内遮光罩最小距离为Δ,则可得单块遮光板的板宽计算公式为
P=(R+Δ)(1+tanβ)
(14)
取R=1.75 m,Δ=0.1 m,可得遮光板宽度为P=2.434 m,内遮光罩中心到遮光板展开根部距离L=1.940 m.
2)板长设计
遮光板长度主要受午夜规避时长的影响.设午夜规避时间为星下点地方时00:00±N(h),则对应规避期间卫星轨道运动相对惯性系转过角度为15N(°),从而可根据下式计算板长

(15)
假设午夜规避时间取星下点地方时00:00±2 h,则可得遮光板长度不小于6.4 m,进出午夜规避时刻太阳入射与整星几何关系如图7所示.

图7 午夜规避附近遮光板与太阳光入射关系侧视图
3)斜切设计
由于内遮光罩截面为圆形,因此可对遮光板进行斜切进一步减轻重量.斜切角大小主要取决于午夜规避时长和内遮光罩半径.本方案斜切角度如图7右侧阴影部分所示.
4 姿态控制策略设计
根据遮光板遮挡效果分析结果和偏航角优化设计结果,为了实现相机太阳保护,同时使得太阳规避时间最短、规避效果最佳,提出每轨包含3次姿态机动的八段式姿态控制策略.基于卫星业务运行期间相机保护的需求,制定姿态控制策略,一个轨道周期内的控制方案示意图如图8所示.

图8 一个轨道周期内姿态控制策略示意图
根据时间节点A、B、C、D、E、F、G、H将轨道划分为8个弧段,下面对各弧段的控制任务进行详细说明(每个弧段的持续时间由具体卫星任务确定).

当卫星运行到A点直至B点,对应星下点当地时间为21:20~22:00(时长40 min,对应卫星10°转角),卫星姿态仅允许向东偏置,不允许向西偏置,南北方向均允许姿态偏置,实际上,卫星在B点(星下点时间21:40)即开始太阳规避机动,因此真正的限制机动区域为20 min.

当卫星运行到C点,星下点当地时间22:00,开始午夜太阳规避机动,并且要求在22:20前完成机动操作,具体机动策略根据季节分为两种工况:
“春分~夏至~秋分”期间,先绕本体X轴机动-30°,再绕本体Z轴机动(90-ψ)°;
“秋分~冬至~春分”期间,先绕本体X轴机动30°,再绕本体Z轴机动-(90-ψ)°.
ψ为偏航偏置角,根据第2节给出的偏航导引律获取,太阳规避角选择30°,在最恶劣的情况下(春秋分期间),有6.5°余量.根据卫星质量特性选用合适的执行机构,可满足姿态机动时间要求.

该段时间内,卫星保持太阳规避姿态.

当卫星运行到D点,星下点当地时间02:00,开始太阳规避后姿态恢复机动,并要求在02:20前完成机动操作,具体机动策略根据季节分为两种工况:
“春分~夏至~秋分”期间,先绕本体Z轴机动(90-ψ)°,再绕本体X轴机动-30°;
“秋分~冬至~春分”期间,先绕本体Z轴机动-(90-ψ)°,再绕本体X轴机动30°.

当卫星运行到E点直至F点,对应星下点当地时间为02:20~02:40,卫星姿态仅允许向西偏置,不允许向东偏置,南北方向均允许姿态偏置.

当卫星运行于F点至G点间,对应星下点当地时间为02:40~11:55,卫星正常业务运行,可进行全地球圆盘及冷空间成像.

当卫星运行到G点直至H点,对应星下点当地时间为11:55~12:05,进行正午偏航姿态机动:
“春分~夏至~秋分”期间,绕本体Z轴正向机动(180-2×ψ)°;
“秋分~冬至~春分”期间,绕本体Z轴负向机动(180-2×ψ)°.

当卫星运行于H点至A点间,对应星下点当地时间为12:05~21:20,卫星正常业务运行,可进行全地球圆盘及冷空间成像.
5 结 论
通过静止轨道大口径光学相机遮光板和整星姿态控制的联合设计,得到相机遮光板最优设计方案,收拢状态可满足运载整流罩包络要求,展开状态可保证在最恶劣的情况下(冬夏至),除午夜规避时间±2 h、限制区域工作时间40 min、调头机动时间10 min之外,其余时间可正常业务运行(相机内遮光罩内壁不受阳光直照).最后对太阳规避姿态机动进行了仿真,结果表明可在4 min内完成姿态机动,最终可实现一个轨道周期内的相机成像时间不少于18.5 h,相当于在轨可用率为77.1%,因此本文提出的遮光板设计方法和姿态控制策略可满足GEO超大口径遥感卫星的遮光保护需求,并可保证卫星的应用效能.
猜你喜欢
智能计算机与应用(2022年9期)2022-09-28
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
考试与评价·高二版(2021年1期)2021-09-10
北京汽车(2021年1期)2021-03-04
语数外学习·高中版上旬(2020年8期)2020-09-10
当代陕西(2019年12期)2019-07-12
新高考·高一数学(2019年1期)2019-04-15
汉语世界(The World of Chinese)(2019年1期)2019-03-18
中学生数理化(高中版.高一使用)(2018年5期)2018-06-04
