航天产品多余物自动检测信号提取方法
2022-08-02 14:08:52周晓娜
空间控制技术与应用 2022年1期
严 明, 胡 隽, 周晓娜, 王 晶
1. 北京东方计量测试研究所, 北京 100094
2. 北京控制工程研究所, 北京 100094
0 引 言
航天产品多余物检测是航天产品质量问题把关的一个重要方面,也一直被航天质量管理所重视.传统的多余物检测方法主要是通过人工目测、照相、晃动产品耳听噪声的方法,这些方法受到主观因素约束比较大,容易形成漏检[1].粒子碰撞噪声检测是近些年来提出的一种多余物的检测方法,这种方法不仅可以实现高灵敏度的多余物检测,还可以实现多余物质地和尺寸的自动判断[2],在文献中得出多余物碰撞次数或波形中尖峰数分布按概率与碰撞的弹性程度正相关的结论.
从已经应用的产品上来说,DZJC-3型多余物自动检测系统是由哈尔滨工业大学研发的主要多余物检测系统之一,已经在航空航天的多余物检测中发挥重要作用.
随着粒子碰撞噪声检测方法研究的日益深入及工程应用的普及,很多文献对粒子碰撞噪声检测方法做了深入研究,其中文献[3]通过转动导弹舱体来检测在装配过程中可能遗漏的多余物.在检测过程中,由于导弹舱体的旋转,多余物会撞击导弹舱体的舱壁,从而在声学上会产生一系列的尖端脉冲.文献中通过旁置麦克风阵列的形式来采集多余物粒子碰撞噪声,通过设置能量阈值的判别方法来判别多余物的存在,其中多余物的位置通过传声器的阵列中声音信号能量最强的传感器的位置来估计.这种方法的缺点是多余物产生的粒子碰撞噪声是一种振动信号,如果通过麦克风阵列的方式采集势必存在较大的衰减,因此比较适合采用压电式的振动传感器来采集多余物粒子碰撞噪声.
文献[4]中讨论了多余物粒子碰撞噪声采集系统的电路设计问题,文献还是以麦克风声音采集的电路为主,采用三级放大和带通滤波的方法放大分离背景噪声和粒子碰撞噪声,取得了一定的效果.
文献[5-7]中主要研究的是信号提取及识别算法,其中在文献[6]中用微粒与平板的碰撞产生声波的数学模型对粒子碰撞噪声信号进行描述,得出了微粒撞击工件壁面所产生信号的主频与多余物微粒的撞击速率、微粒弹性模量、壁面弹性模量、微粒粒径以及微粒密度之间的定量关系并且以傅里叶变换功率谱密度和频谱质心为评价参量作为多余物识别的依据.
但是在实际的多余物检测系统中,不可避免地会采集到机械驱动装置的耦合噪声,从而造成多余物信号识别的误差,因此本文针对粒子碰撞噪声检测方法在实际应用中信号提取问题,通过对粒子碰撞噪声时频域内的成分变化情况进行分析,区别出机械驱动装置噪声和粒子碰撞噪声在时频分布中的不同,提出了一种在复杂噪声背景环境下可以有效提取多余物信号的最小均方自适应滤波算法,这个算法主要利用机械驱动装置噪声和粒子碰撞噪声时间相关性的不同来提取粒子碰撞噪声信号,同时对具有短时平稳性的机械驱动装置噪声有压制作用.这个算法可以从粒子碰撞噪声检测方法实施过程中由于转台或者振动台等可动部件带来的机械噪声中提取多余物特征信号.
1 粒子碰撞噪声检测方法
基于粒子碰撞噪声的多余物检测方法主要是通过把待测产品用夹具固定在转台或者振动台上,用音频传感器或者振动传感器拾取产品在转台转动或者振动台振动时的振动信号,如果没有多余物存在,振动传感器采集到的是转台转动或者振动台振动带来的背景噪声信号.当有多余物存在的情况下,振动传感器采集到的不仅有转台或者振动台信号,还会采集到由于多余物碰撞产生的粒子碰撞噪声信号.采集得到的振动信号传入计算机,由算法进行信号分离和识别工作,系统图如图1所示.
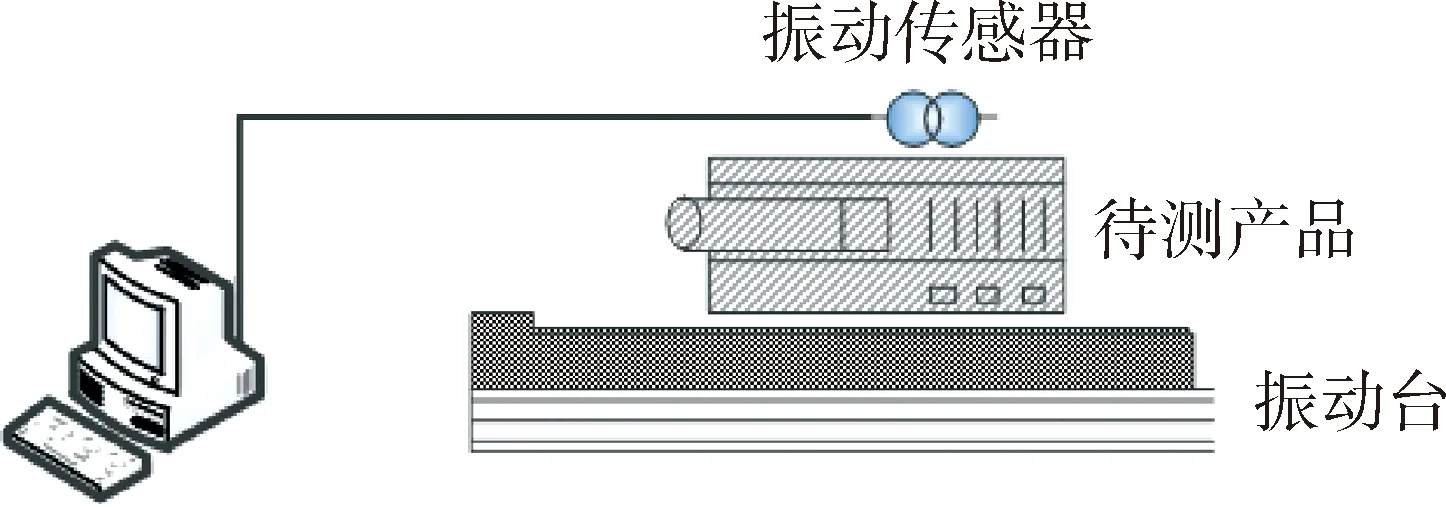
图1 粒子碰撞噪声检测系统示意图
粒子碰撞噪声信号由转动或者振动环境下,多余物碰撞产生,因此是类似于声发射的信号波形.而背景噪声则是转台机构或者振动台机构产生的机构噪声波形.其中转台机构属于旋转机械,产生的是频谱以线谱群为特征的稳态噪声,这种噪声环境背景下可以用谱减法[5]提取出多余物产生的粒子碰撞噪声信号.
但是在以振动台为驱动载体的多余物检测系统中,振动台产生的噪声背景信号与转台噪声背景不同,是具有循环平稳时变噪声信号,因此需要采用新的方法提取粒子碰撞噪声信号.本文设计了归一化最小均方自适应滤波算法(NLMS),利用多余物粒子碰撞噪声信号时域上的突发性来提取信号,取得很好的效果.
2 粒子碰撞噪声成分分析
粒子碰撞噪声是由振动台驱动工件产生的多余物噪声,其中混杂各种噪声成分,采集实际的粒子碰撞噪声信号,采用短时傅立叶变换进行分析可以得到时频谱图如图2所示,图中横坐标为时间,纵坐标是信号在时间片上的频谱分布,由时频频谱图可以分析出粒子碰撞噪声在时间上的变化情况.由椭圆标出的频谱是由振动台产生以短时平稳为特点的机械噪声部分,而由箭头指出的部分为多余物碰撞产生的粒子碰撞噪声部分.可以看出粒子碰撞噪声是一种宽频的冲击噪声,这个和机械噪声存在差异性,可以作为分离机械噪声和粒子碰撞噪声的依据.而分离短时平稳信号和冲击噪声最有效的算法就是自适应噪声抵消算法,因此本文设计了自适应的最小二乘算法作为提取粒子碰撞噪声的方法.
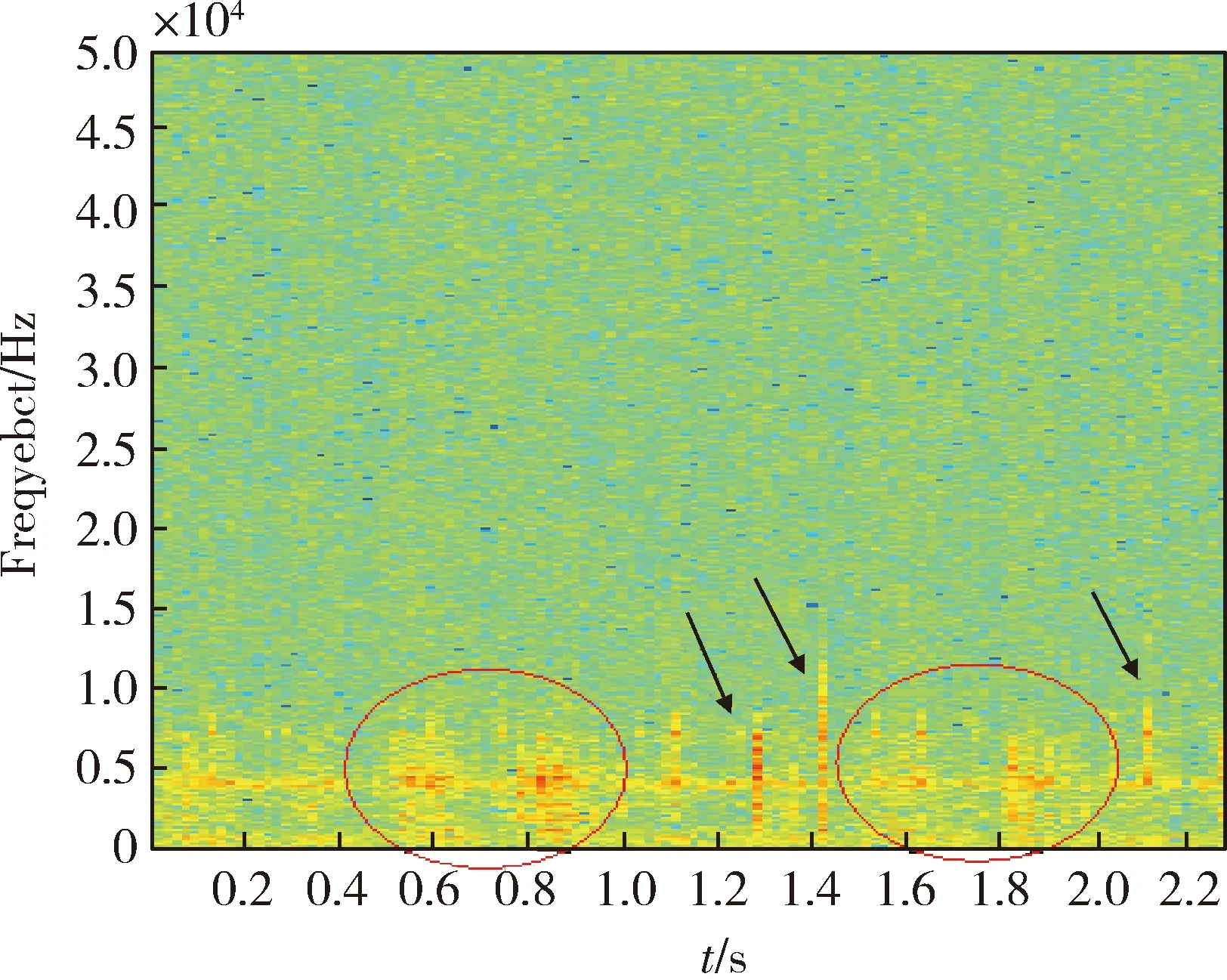
图2 粒子碰撞噪声时频谱图
3 归一化最小均方自适应滤波算法
自适应滤波器算法最常见的应用场景是利用单纯噪声通道的数据经过自适应滤波以后,抵消含噪声的信号通道中的噪声[8].归一化最小均方自适应滤波算法是从最小均方自适应算法(LMS)变化而来[9],其特点是通过信号功率的归一化来控制滤波器更新的步长,这样可以避免LMS算法在迭代中滤波器发散的情况[10].具体算法如图3所示,X(n)=[x(n-k+1) …x(n)]为采样序列的k个采样点,其中x(n)点为当前时刻的采样点,W(n)=[wk…w2w1]为自适应滤波器的系数向量,y(n)为第二个通道实际采样点的值,那么

图3 NLMS算法结构图

(1)
e(n)表示的是估计误差.
与LMS算法不同的是,归一化最小均方自适应滤波算法采用式

(2)
更新迭代自适应滤波器系数,其中r为稳定因子,u为步长,需要算法运行前设置.
这里X(n)中的x(n)对应的就是单纯噪声通道当前的采样值,y(n)对应的是含噪声的信号通道当前的采样值.随着NLMS误差更新到最小值时,噪声通道的噪声与自适应滤波器系数的乘积的和∑x(n-i+1)*wi为理论上等于y(n)中的噪声分量.此时误差信号e(n)就是含噪信号通道中的信号分量,达到了自适应滤波的效果.不同于普通的LMS算法,由于NLMS算法对信号功率的归一化避免了自适应滤波算法中最常见的误差发散问题,因此NLMS算法在工程实践中得到了广泛应用,而且在强噪声环境的信号处理中具有优良的性能[11-12].
4 基于NLMS的粒子碰撞噪声提取
在本文的方法中,利用粒子碰撞噪声的时间上的非平稳特性来作为提取的依据,具体来说,如图4所示使用采集的粒子碰撞噪声信号序列延时后的数据作为噪声信号输入给NLMS自适应滤波器来抵消实时采集数据的噪声,当振动传感器采集的是转台或者振动台的噪声时,由于噪声的平稳性,采样延时的噪声数据和当前采集的噪声数据存在比较大的关联性,通过NLMS自适应滤波器的自适应抵消作用就可以把噪声抵消掉,当多余物产生的粒子碰撞噪声信号进来时,由于粒子碰撞噪声信号具有突发性,在采样延时的信号数据中没有粒子碰撞噪声信号的成分,这样已经达到误差收敛状态的NLMS自适应滤波器不会利用采样延时的噪声数据抵消粒子碰撞噪声信号数据,因此信号处理流程结果上就达到了抵消转台和振动台噪声同时保留粒子碰撞噪声信号的效果.
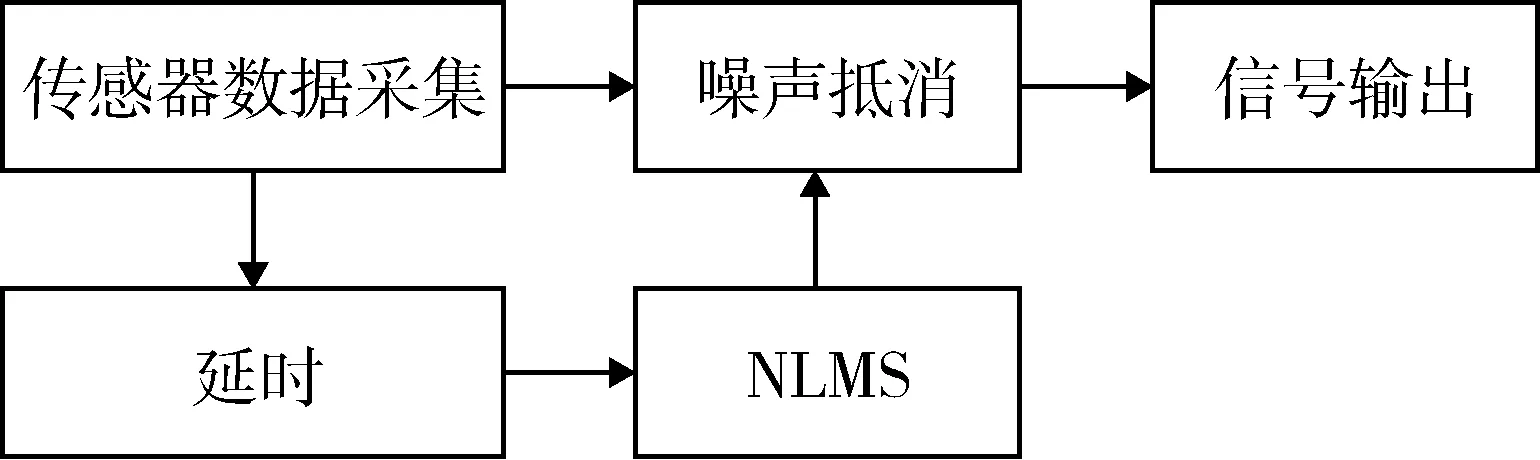
图4 粒子碰撞噪声信号提取示意图
5 仿真分析
为了验证算法的有效性,采用了计算机仿真的方法给予验证,通过人为制造粒子碰撞噪声信号并添加多个随机频率和幅值的正弦背景噪声信号作为干扰.实验中的粒子碰撞噪声信号通过单个锯齿波调制500 Hz正弦波产生,如图5所示.
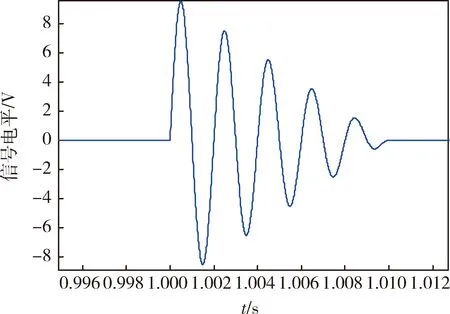
图5 粒子碰撞噪声信号示意图
经过添加一个振幅为2 V的主要正弦噪声信号和10个在幅度0~0.1 V范围内随机分布的正弦噪声信号叠加,得到背景噪声下的粒子碰撞噪声信号如图6所示.用基于NLMS的粒子碰撞噪声信号提取滤波算法处理含噪声信号以后,得到粒子碰撞噪声信号波形如图7所示,可见NLMS算法不仅对稳态的背景噪声有抑制作用,并且对具有声发射信号性质的粒子碰撞噪声信号有很强的增强作用,有利于航天产品多余物的检测.
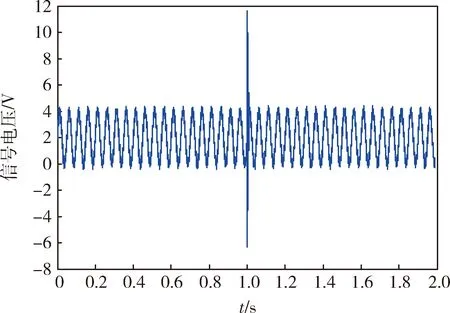
图6 背景噪声下的粒子碰撞噪声信号
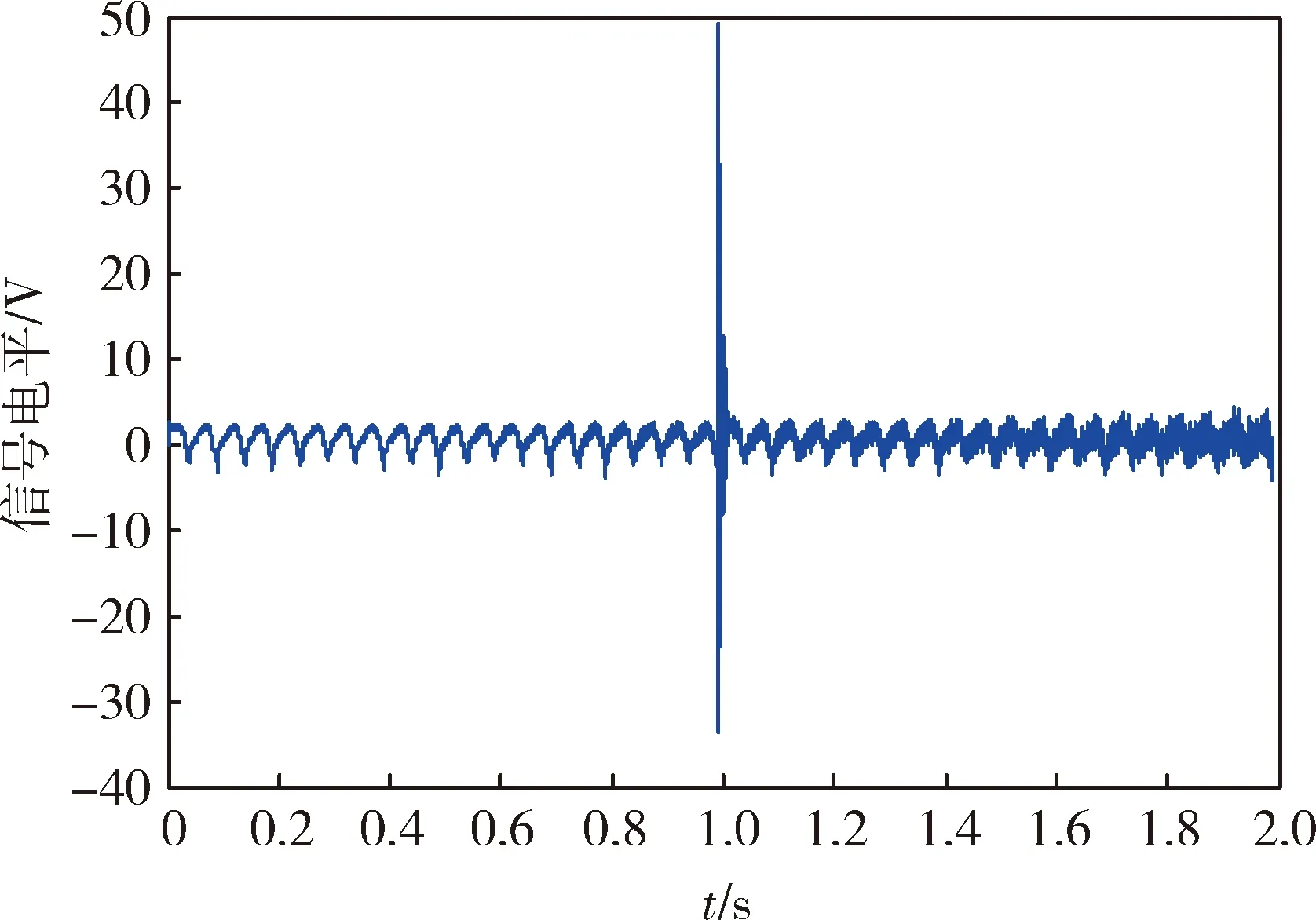
图7 滤波后的粒子碰撞噪声信号
6 实际应用
本文采用基于NLMS的粒子碰撞噪声信号提取滤波算法处理实际的多余物检测系统采集的信号.产品内的多余物是人为放置的M4螺丝钉,大约3 mm长度.用压电式振动传感器配合振动台执行器采集产品内多余物振动时产生的粒子碰撞噪声,如图8所示.信号在由传感器采集以后,首先经过数字低通滤波器,然后在此基础上经过基于NLMS的粒子碰撞噪声信号提取滤波算法处理,输出信号波形如图9所示,在实验中通过设置振动台的周期在1.28 s时间处产生了粒子碰撞噪声信号,在1.28 s时间之前为振动台产生的噪声,由图中可以看出在信噪比角度看来,1.28 s之前的由振动台产生的背景噪声信号都可以被很大程度上削弱,可见经过基于NLMS的粒子碰撞噪声信号提取滤波算法滤波以后,不仅算法可以削弱平稳性强的振动台背景噪声,而且可以把原来信号中所固有的直流缓变偏置项去除,这个对后端通过信号幅度阈值来识别多余物的方法也是必要的.
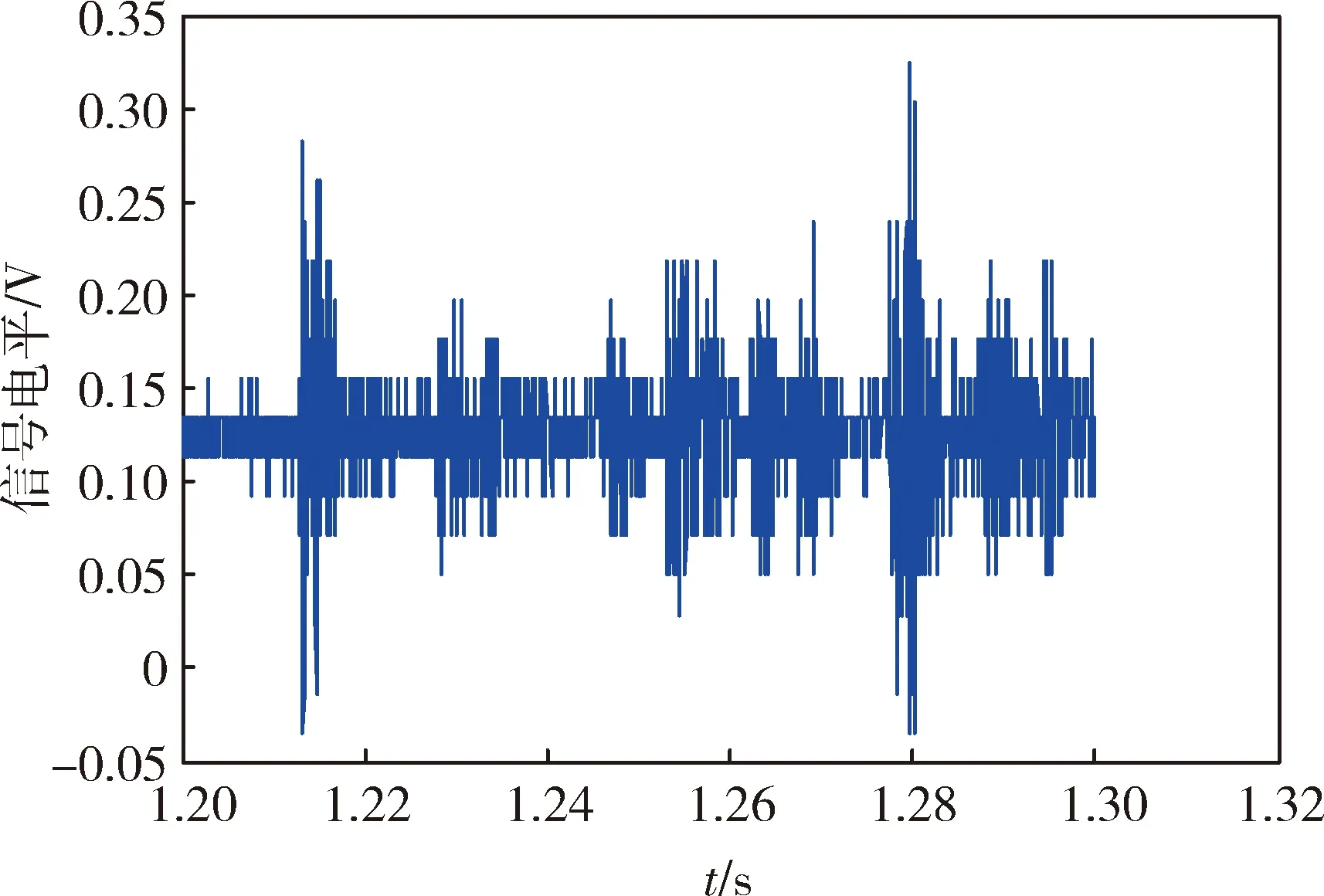
图8 实际环境中粒子碰撞噪声原始信号
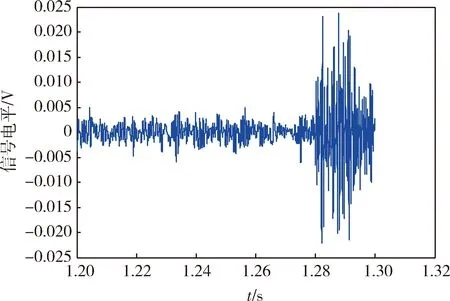
图9 实际滤波得到的粒子碰撞噪声信号
实验的结果与仿真的结果相比,不同之处是在实验结果中虽然信噪比提高了,但是从幅度的角度来看,粒子碰撞噪声信号和振动台噪声信号都受到了压制.这个是因为不同于仿真实验中的情况,在实际应用中粒子碰撞噪声信号和振动台噪声信号存在一定程度的相关性,比如某些频谱上的重合.
7 结 论
本文提出了一种新的航天产品多余物检测中粒子碰撞噪声信号的信号提取方法.新的方法主要是应用归一化最小均方自适应滤波算法到粒子碰撞噪声信号检测中,从而不仅可以削弱转台或者振动台带来的平稳性背景噪声,而且可以把信号中缓变的直流偏置去除.这样可以在后端处理中应用信号幅度阈值来判别多余物的存在.当然也可以通过振动台的主动振动控制来达到相同的效果,但是会需要引入更复杂的环节[13].
猜你喜欢
通信电源技术(2024年2期)2024-04-07 14:35:26
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:22
地震研究(2017年3期)2017-11-06 23:38:05
应用海洋学学报(2015年1期)2015-11-22 07:19:32
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
振动工程学报(2015年1期)2015-03-01 01:15:44
噪声与振动控制(2015年4期)2015-01-01 07:08:38
振动工程学报(2014年2期)2014-03-01 01:15:20
电子设计工程(2014年20期)2014-02-27 12:01:00