车路协同环境下智能交叉口车速控制
2022-07-29 10:24潘福全张丽霞杨晓霞陈秀锋李昕光
控制理论与应用 2022年6期
张 游,潘福全,张丽霞,杨晓霞,陈秀锋,李昕光
(青岛理工大学机械与汽车工程学院,山东青岛 266520)
1 引言
交叉口是城市路网中的重要节点,其时空间隙分配是否高效合理直接影响交叉口的控制效率.在传统信号控制系统下,车辆通过红灯交叉口时需要减速停车,等待绿灯信号放行后继续行进.在此过程中,车辆频繁的启停与加减速行为不仅加剧了车辆能耗,而且增加行车时间延误,影响交叉口通行效率[1].随着车路协同技术的发展,交叉口控制模式将会向着智能化、精细化的方向变革,并实现从车流控制到车辆控制的转变.在此趋势下,国内外学者针对交叉口车辆速度控制问题进行了一定的研究,并相继提出了基于间隙理论、信号预约、绿波优化的交叉口车辆运行控制策略,其基本思想均是通过车速引导的方式,使车辆在保证行车安全的条件下,高效快速通过交叉口.
文献[2]以车辆不停车通过交叉口作为优化目标,基于车辆时空轨迹和信号配时参数,提出了一种绿波车速诱导策略,有效减少了行车延误和停车次数.文献[3]提出了一种生态驾驶车速决策算法,使车辆在绿灯时间内以最少能耗不停车通过交叉口,将其与动态规划最优解算法进行比较,证明该算法有效且计算量更小.文献[4]基于单一信号控制交叉口,以停车时间最短为约束条件,建立了车路协同环境下的个体车辆速度引导模型,并通过仿真验证了模型的优化效果.文献[5]提出了车联网环境下不改变信号配时的车速控制策略,运用加速和减速控制模型使车辆无停车通过交叉口,仿真表明该策略能够缩短约60%的车辆行程时间.可以看出,上述研究均还是依托于传统的信号控制系统,未能摆脱交叉口信号配时对于车辆通行时间的约束.
文献[6]设计了一种交叉口网联车辆协同控制算法,通过消除个体车辆间的轨迹冲突,引导车辆以建议速度安全通过交叉口,但该算法只是针对单车道直行交叉口,未考虑多车道交叉口和转弯车辆的通行情况.文献[7]为提高交叉口通行能力,提出了基于间隙理论的车队自适应控制方法,对交叉口排队车辆划分编队,并通过速度引导使其利用冲突车流间隙实现交替通行,该方法在一定程度上降低了单体车辆的通行效率.文献[8]对智能交叉口的最优交通控制进行研究,开发了一种随机交通分析模型,使交叉口排队车辆之间的车头时距能够满足冲突方向上的车队顺利穿过,该研究的局限性在于仅适用于单向直行车辆,仍无法普及应用于转弯车辆.文献[9]在间隙控制方法的基础上,提出基于队列估计和预演轨迹的交叉口间隙分配方法,并构建了加速度动态调节模型以实现车速引导,验证表明该方法能够进一步提高交叉口通行能力,降低延误,但其对于冲突车流的避碰研究还不够深入,在时空资源利用上仍具有优化空间.
基于此,本文以保证行车安全、提高交叉口通行效率为目标,提出一种具有较强普适性的无信号灯智能交叉口车速控制方法,从时间和空间角度制定交叉口冲突消解策略,建立了车辆跟驰控制模型和冲突避碰模型,使车辆能够在满足基本安全条件下,以最优安全速度无碰撞、不停车通过交叉口,从而实现交叉口控制模式的智能转变.
2 智能交叉口车速控制系统
2.1 系统架构
智能交叉口控制系统主要由车载控制单元、路侧信息感知单元和云端控制中心组成.车载控制单元负责采集车辆的行驶状态信息,包括速度、加速度、行驶方向等;路侧信息感知单元负责采集车辆进入控制区域后的位置信息和行驶时间信息;云端控制中心负责将采集到的信息进行融合处理,通过速度决策模型为各车辆寻求安全通行时空间隙[10],计算得出车辆通过交叉口的最优安全速度vp,并将速度值反馈予对应行驶车辆.下图1为智能交叉口控制系统架构示意图,为使车辆在进入交叉口前有足够的时间与空间进行速度调整,将一定长度的进车口路段设定为调控区.
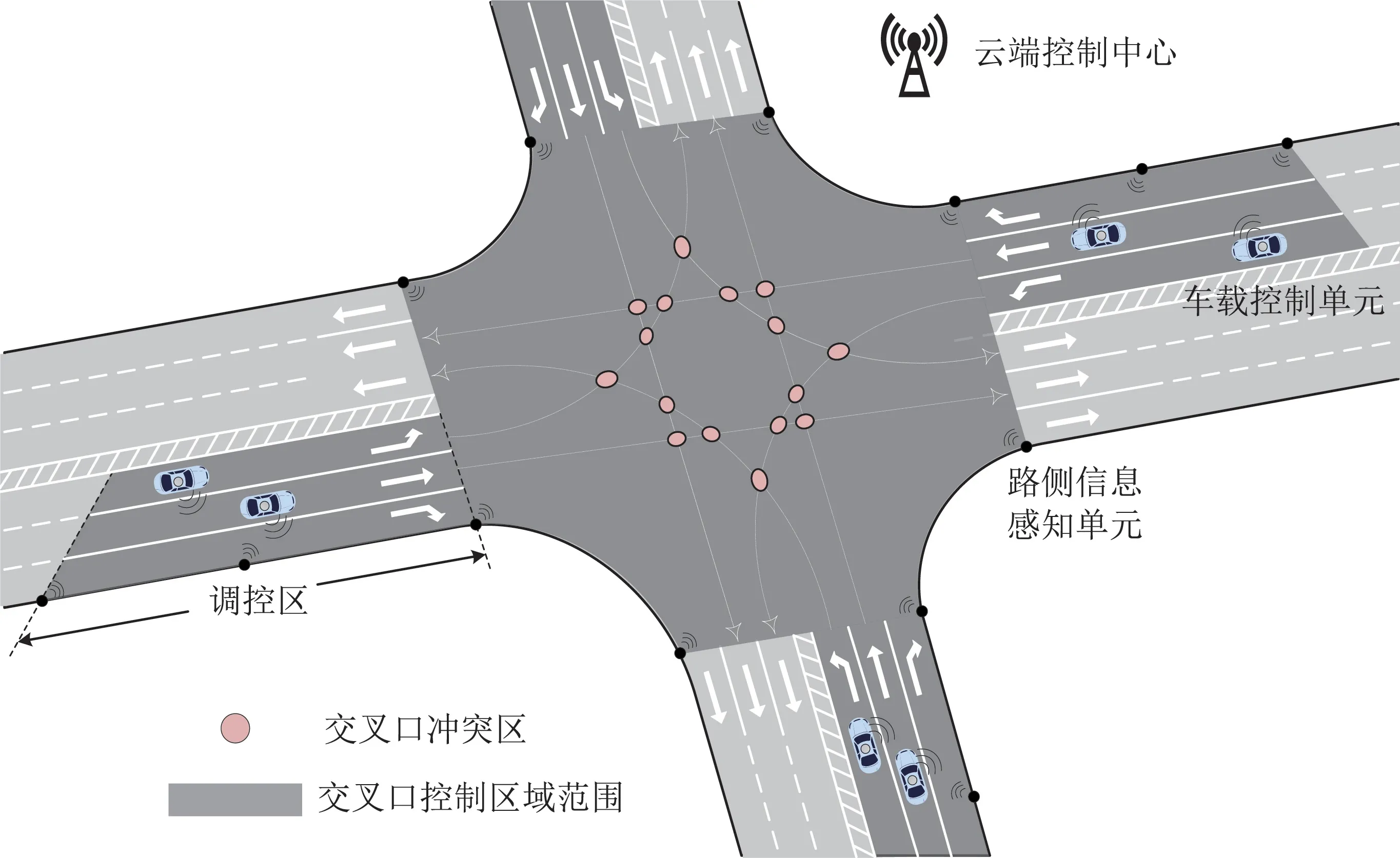
图1 智能交叉口控制系统架构示意图Fig.1 Schematic of intelligent intersection control system architecture
2.2 调控区范围界定
车辆A以初始速度vA0驶入调控区时,云端控制中心将交叉口通行最优安全速度vAp反馈予车辆速度控制单元,车辆在tA0–tAv时间段内以匀加/减速运动进行速度调整,当调整至最优安全速度vAp后保持匀速行驶,直至驶离交叉口.车辆速度调整过程如图2所示,tA0,xA0分别表示车辆A进入调控区时的初始时刻和起始位置,定义tA0=0,xA0=0;tAv,xAv分别表示车辆A速度调定时的行驶时间与行驶距离;tAm,xAm分别表示车辆A进入交叉口时的行驶时间与行驶距离.xA0–xAm之间的距离即为调控区范围L,其最短长度应满足车辆以任何初始速度进入调控区均能有足够时间完成速度调整,故调控区范围约束条件为
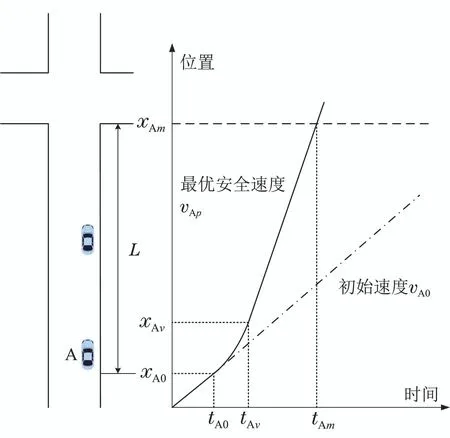
图2 车辆速度调整示意图Fig.2 Schematic of vehicle speed adjustment

式中:vpmax和v0min分别为交叉口控制区域内允许的车辆最大速度和最小速度;aA为车辆A速度调整时的加速度.
2.3 交叉口车辆通行时间轴建立
在车路协同交通环境下,通过车与车、车与路、车与云之间的信息交互,云端控制中心可以实时获取交叉口控制区域内的车辆行驶状态信息,并基于路况信息对单体车辆进行直接管控[11–12].为实现车辆安全通行时空间隙动态分配,选取调控区、交叉口和各冲突区的边界点作为关键节点,对车辆在交叉口控制区域的通行时间进行划分,建立交叉口车辆通行时间轴如图3所示.

图3 交叉口车辆通行时间轴Fig.3 Schematic of traffic time axis at intersection
由于各车辆进入交叉口控制区域的初始时间不同,当车辆A驶入交叉口控制区域时,假设控制区域内存有n辆车,则
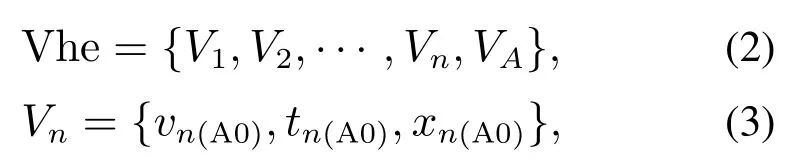
其中:Vhe表示交叉口控制区域内所有车辆的集合;Vn表示车辆A驶入控制区域时n车的行驶状态集合;Vn(A0),tn(A0),xn(A0)分别表示车辆A驶入控制区域时n车的行驶速度、行驶时间和行驶距离.由此,基于时间点tn(A0)可将新进车辆A和控制区域内车辆n的通行时间归一于相同时间轴,即

式中:tAn表示车辆A在车辆n时间轴上的行驶时间;tA表示车辆A驶入控制区域后的行驶时间.
3 基于时空间隙动态分配的智能交叉口车速控制方法
3.1 控制策略
假设车辆A将要不停车通过交叉口,为保证行车安全,必须满足两个基本条件:1)不与同车道前车碰撞;2)不与交叉口内冲突车辆碰撞.因此,当车辆A进入交叉口控制区域时,根据tA0时刻控制区域内其他车辆的行驶状态,构建车辆跟驰控制模型和冲突避碰模型,寻求车辆安全通行时空间隙,并决策车辆不停车通过交叉口的最优安全速度vAp,智能控制流程如图4所示.
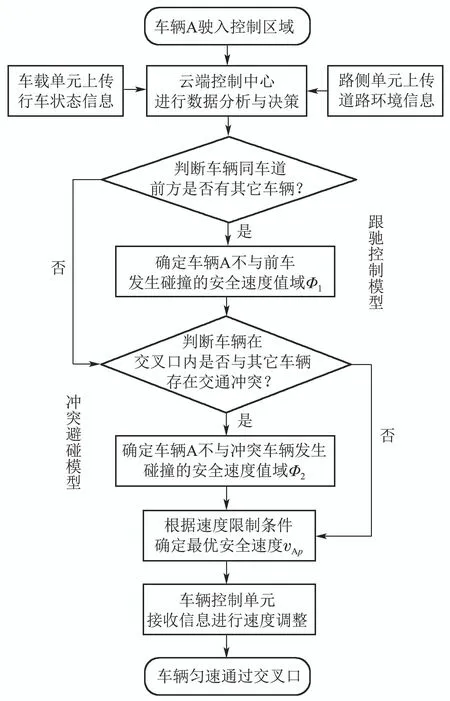
图4 智能交叉口控制流程图Fig.4 Flow chart of intelligent intersection control
3.2 跟驰控制模型
车辆A进入控制区域后,其行驶速度受同车道前车速度的制约,即在整个交叉口通行过程中不能超越同车道前车,且不发生碰撞[13].为保证行车安全,设定车辆跟驰最小安全距离为δm.则跟驰控制模型的目标函数为车辆在交叉口通行过程中与前车之间的最小距离不小于δm,其表达式为

式中xA,xF分别为A车与前车进入控制区域后的行驶距离.
车辆A的行驶距离表达式为
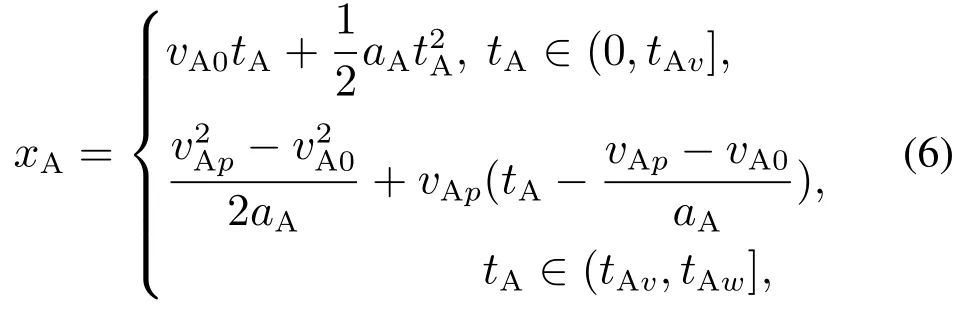
式中tAw为A车驶离交叉口时的行驶时间.
A车前车的行驶距离表达式为
1) 如若tF(A0)>tFv,即A车进入控制区域时,前车速度已经调定,则

2) 如若tF(A0)≤tFv,即A车进入控制区域时,前车速度尚未调定,则
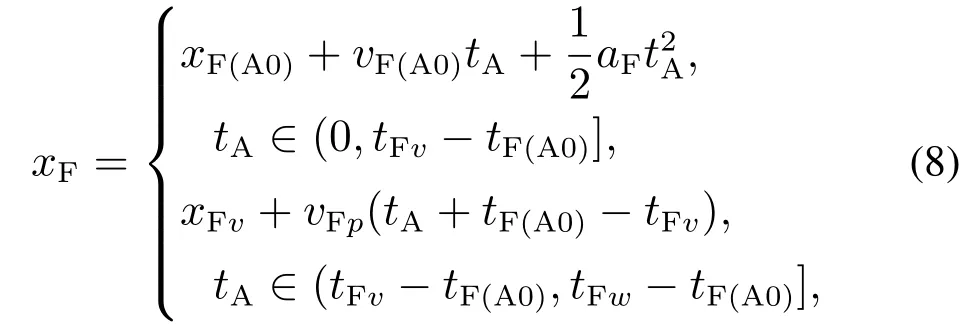
式中:tFv,xFv分别为A车前车速度调定时的行驶时间与行驶距离;aF为A车前车速度调整时的加速度;vFp为A车前车的最优安全速度;tFw为A车前车驶离交叉口时的行驶时间.
此外,tAv和xAv均为与vAp相关的函数,即
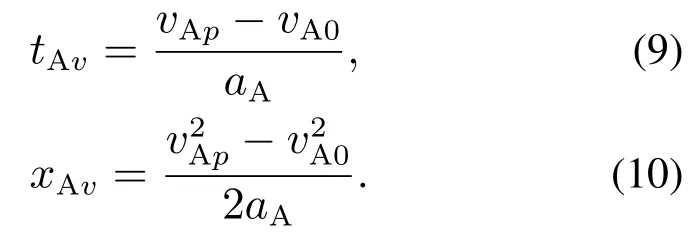
故∆x=xF−xA=f(tA,vAp),tA为目标函数的自变量,由此可求得vAp的可取值域Φ1.
3.3 冲突避碰模型
如图5所示,运用弧度转向模型[14]演绎交叉口车辆行驶轨迹,直行与左转车辆路径均和4条其他方向的路径间存在冲突关联,冲突对应关系如下表1所示.
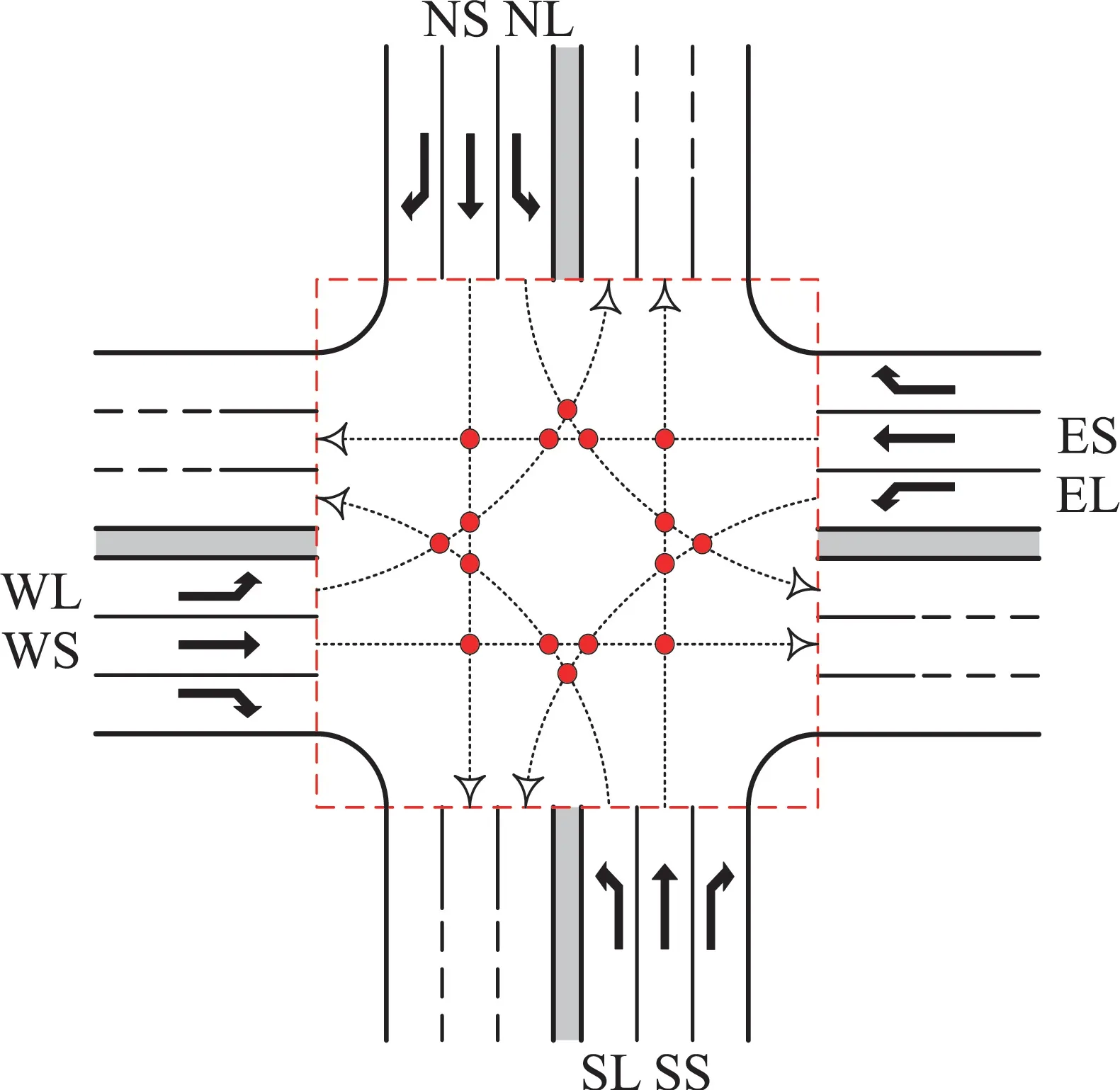
图5 交叉口车辆冲突示意图Fig.5 Schematic of intersection vehicle conflicts
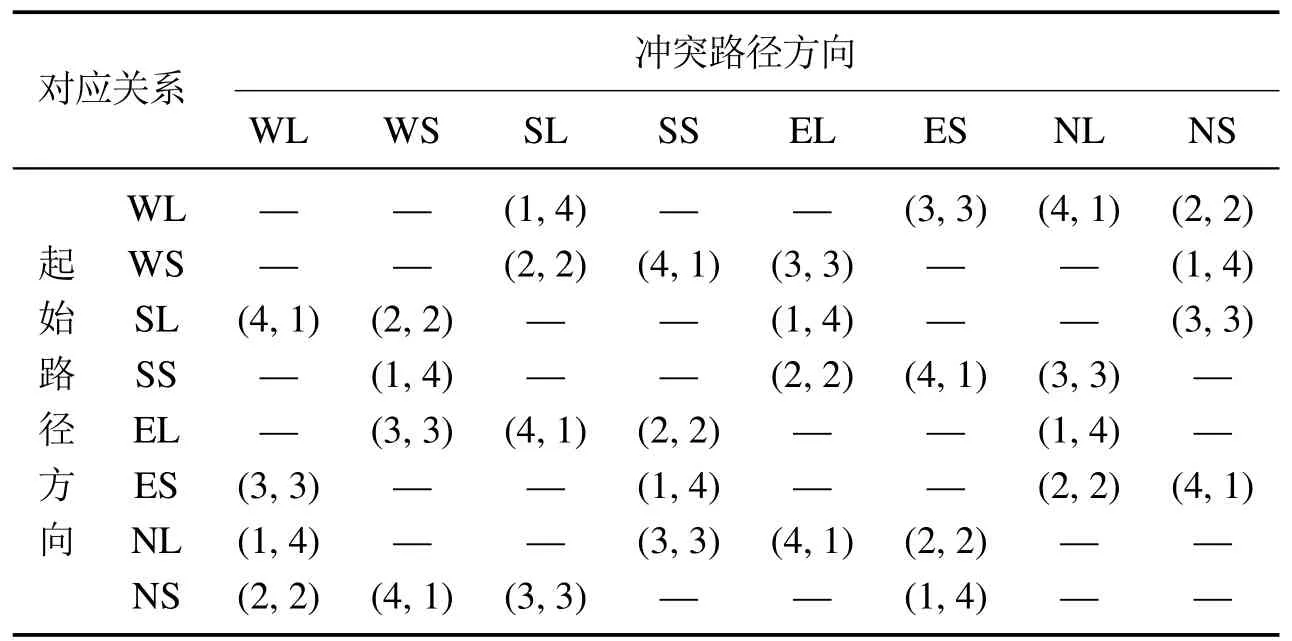
表1 冲突对应关系矩阵MTable 1 Conflicts correspondence matrix M
表1中数对分别为起始路径方向和冲突路径方向的冲突区序号,以WL方向行驶车辆为例,其路径上的第1个冲突区与SL方向的第4个冲突区相对应,第2个冲突区与NS方向的第2个冲突区相对应,第3个冲突区与ES方向的第3个冲突区相对应,第4个冲突区与NL方向的第1个冲突区相对应,如图6所示.
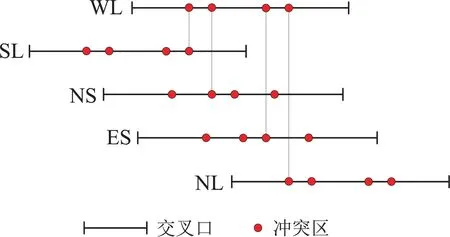
图6 WL方向车辆冲突对应关系示意图Fig.6 Schematic of vehicle conflict correspondence in WL directio
若车辆A自WL方向驶入控制区域,根据关系矩阵M可知,车辆A与交叉口SL,NS,ES,NL 4个方向上的车辆存在潜在冲突,假设4个方向上的车辆总数分别为p辆、q辆、r辆、s辆,与车辆A存在潜在冲突的车辆数分别为i辆、j辆、k辆、m辆,则4个方向的冲突车辆集合分别为
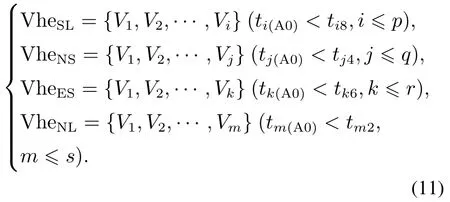
上述4个方向的冲突车辆分别构成4个冲突车队,为避免冲突碰撞,车辆A可通过图7所示的3种选择穿过冲突区,以第1个冲突区为例进行分析.
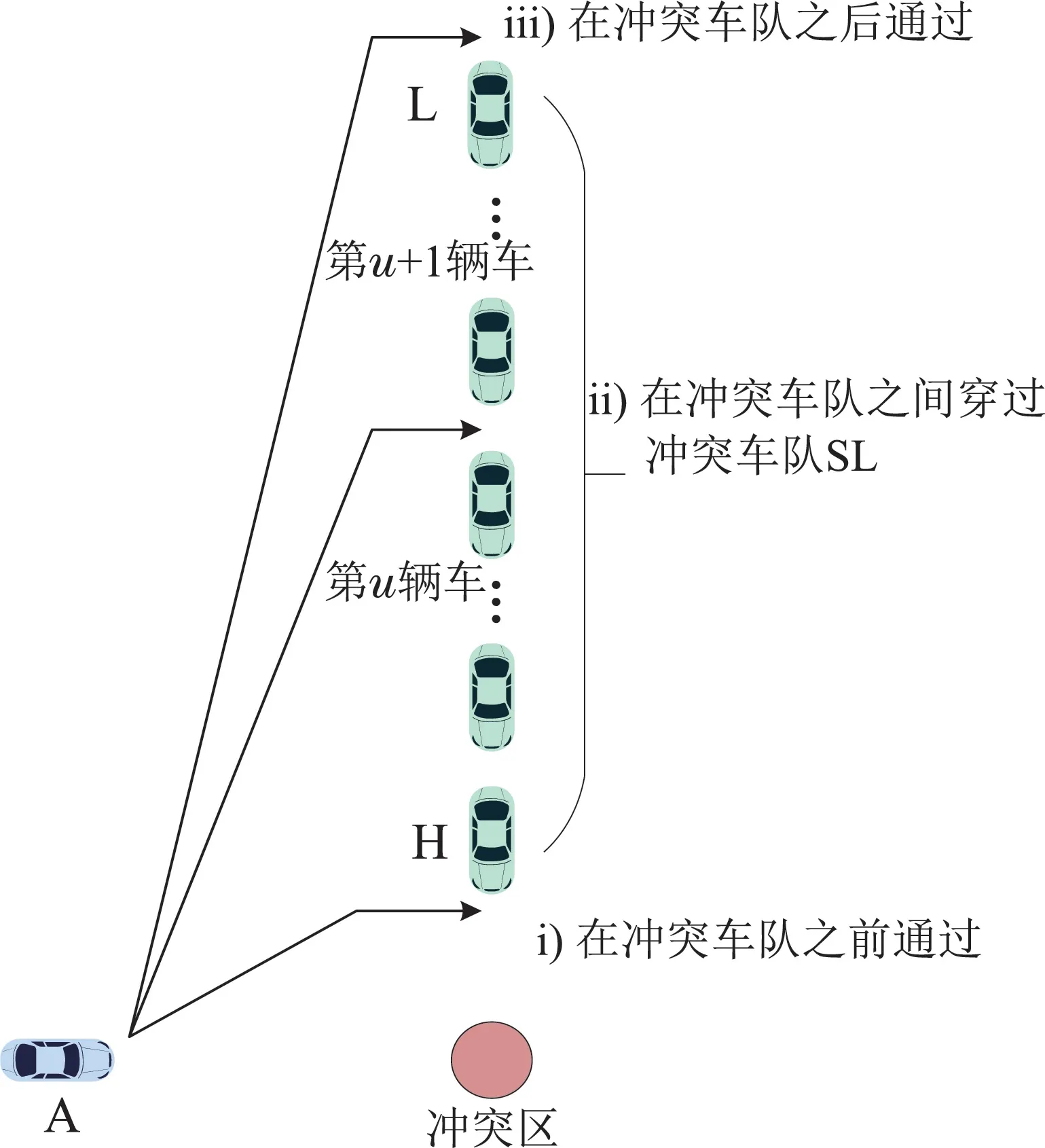
图7 车辆冲突区穿行示意图Fig.7 Schematic of vehicle crossing the conflict zone
1) 在冲突车队之前通过,即A车在冲突车队头车H到达冲突区之前离开冲突区,约束条件为

2) 在冲突车队之间穿过,即A车在冲突车队第u辆车离开冲突区之后到达冲突区,在第u+1辆车到达冲突区之前离开冲突区,约束条件为
3) 在冲突车队之后通过,即A车在冲突车队尾车L离开冲突区之后到达冲突区,约束条件为

式中:tA1,tA2分别为A车到达和离开冲突区的行驶时间;tH(A0),tu(A0),tu+1(A0),tL(A0)分别为车辆A驶入控制区域时冲突车队头车、第u辆车、第u+1辆车、尾车的行驶时间;tH7,t(u+1)7分别为冲突车队头车和第u+1辆车到达冲突区的行驶时间;tu8,tL8分别为冲突车队第u辆车和尾车离开冲突区的行驶时间.
由此,可依次计算车辆在4个冲突区的安全通行时间tAλ和tAλ+1(λ=1,3,5,7),其中:
式中:tAλ,tA(λ+1)分别为车辆A到达和离开冲突区的行驶时间;tAc为车辆A在冲突区的行驶距离;xAλ为车辆A 到达冲突区时的行驶距离.
3.4 最优安全速度求解
步骤1车辆A进入控制区域时,根据此时同车道前车的运行状态,通过跟驰控制模型式(5)–(10)计算车辆A不与前车发生碰撞的vAp可取值域Φ1;
步骤2根据交叉口内所有冲突车辆的行驶状态,通过冲突避碰模型式(12)–(14)分别计算车辆A在4个冲突区的安全通行时间tAλ和tA(λ+1);
步骤3运用式(15)–(16)分别计算车辆A在4个冲突区的安全速度,从而确定车辆A不与交叉口内所有冲突车辆发生碰撞的vAp可取值域Φ2;
步骤4将可取值域Φ1,Φ2与道路限速条件Φ3联立,为提高车辆通行效率,取交集中的最大值作为车辆A的交叉口通行最优安全速度vAp,即:

4 仿真验证
4.1 仿真环境
为验证所提控制方法的有效性与先进性,在VISSIM仿真环境下利用MATLAB编程和COM接口技术[15–16]进行模拟仿真.传统信号控制交叉口采用两相位信号配时,信号周期90 s,各相位绿灯时长40 s,黄灯时长3 s,全红时长2 s.智能控制道路调控区长度L=300 m,车辆跟驰最小安全距离δ=5 m.自由车辆期望速度40 km·h−1,道路限速区间Φ3=[15 km·h−1,60 km·h−1],加速度a=±2 m·s−2.为保证在车流稳定状态下采集相关评价数据,设定仿真预热时间600 s,仿真时间3600 s,每隔300 s采集一次数据.
4.2 仿真结果分析
基于仿真环境中所搭建的路网规模,在交通流量分别为600 pcu·h−1,1200 pcu·h−1和1800 pcu·h−1时,仿真模拟低、中、高车流密度条件下的交叉口通行情况,各进口道直行、左转、右转车流量分配比例为4:3:3.选取车辆平均延误、油耗和污染物排放(CO,NOx,VOC)作为评价指标,对传统交叉口和智能交叉口控制效果进行对比分析.
4.2.1 平均延误分析
不同控制方式下交叉口直行和左转车辆的平均延误时间对比见图8所示.传统控制下的车辆遇到红灯信号时必须排队等候,从而产生较长的停车延误;而智能控制下的车辆通过预先速度调整,能够以安全速度不停车通过交叉口.因此,智能控制下交叉口车辆延误得到了显著缩短,具体延误数据对比见表2.
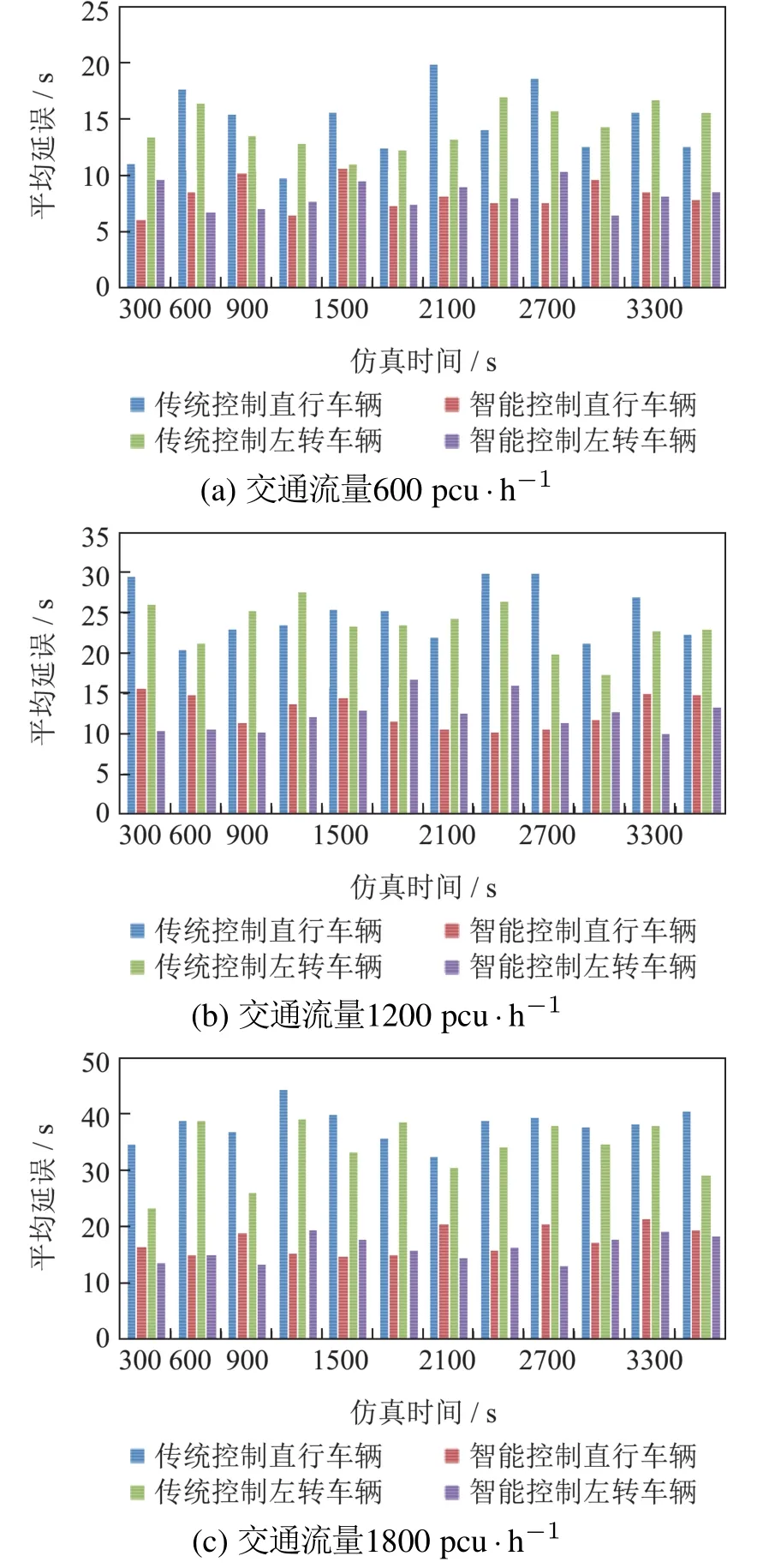
图8 不同交通流量下车辆平均延误对比Fig.8 Comparison of vehicle average delay under different traffic flows
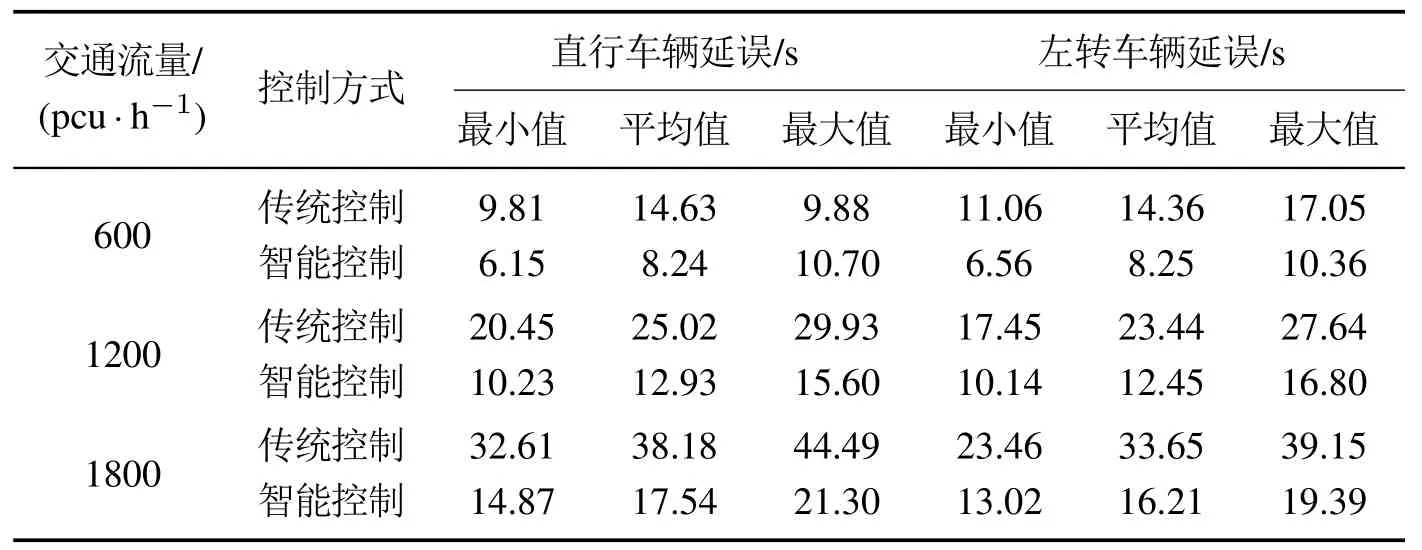
表2 直行和左转车辆延误时间对比Table 2 Comparison of delay times for straight and left turn vehicles
由表中数据可得,在600 pcu·h−1的低车流密度条件下,直行和左转车辆的平均延误分别降低了43.68%和42.55%;在1800 pcu·h−1的高车流密度条件下,直行和左转车辆的平均延误分别降低了54.06%和51.83%.可见,交通流量越高,智能控制交叉口车辆通行效率提升越显著.此外,在智能控制条件下,由于车辆始终处于行进状态,故延误时间相对也较为稳定.
4.2.2 车辆油耗分析
对不同交通流量下交叉口车辆油耗进行统计分析,结果见图9所示.图中每个数据点表示300 s内交叉口控制区域内所有车辆的油耗总量.智能控制下车辆通过交叉口过程中保持匀速状态行驶,无启停行为,故相较于传统控制油耗波动较小;同时,智能控制下车辆由于避免了怠速停车与频繁的加减速行为,能够有效节省车辆油耗.因此,在不同交通流量下车辆油耗分别降低了16.05%,22.75%和31.09%.
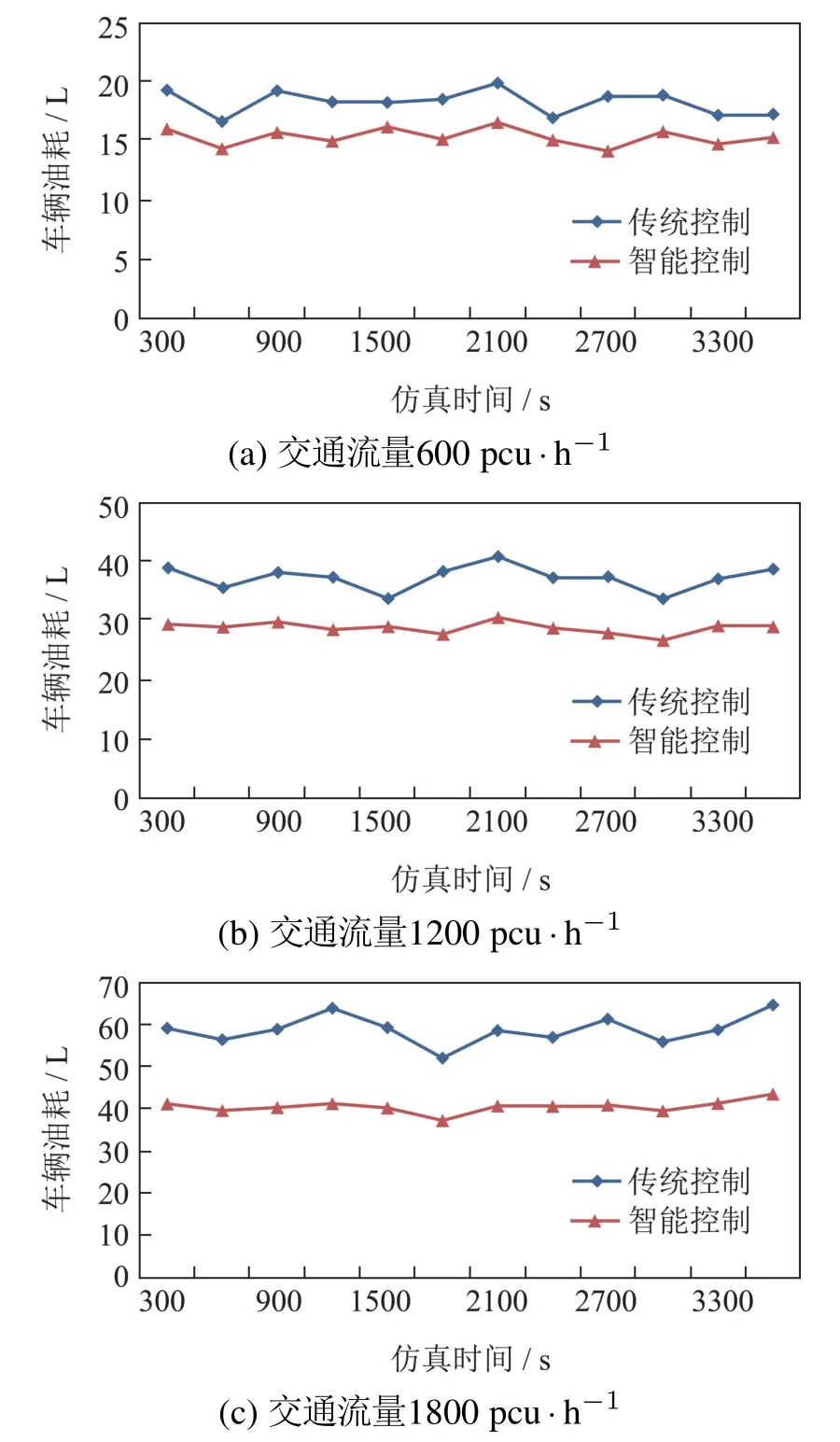
图9 不同交通流量下交叉口车辆油耗对比Fig.9 Comparison of vehicle fuel consumption at intersection under different traffic flows
4.2.3 污染物排放分析
交叉口车辆污染物排放对比如图10所示,在交通流量为600 pcu·h−1,1200 pcu·h−1,1800 pcu·h−1时,总体污染物排放分别减少了13.06%,19.41%,27.86%.可见,随着车流密度的增大,智能控制交叉口车辆污染物排放改善效果越发明显.这是由于在高车流密度条件下,传统控制交叉口由于排队拥堵,导致大量怠速车辆产生了更多的废气排放;而智能控制交叉口中的车辆能够不停车通过交叉口,无需怠速等候,通行时间较传统控制得到了大幅缩短,因此污染物排放量能够显著减少.
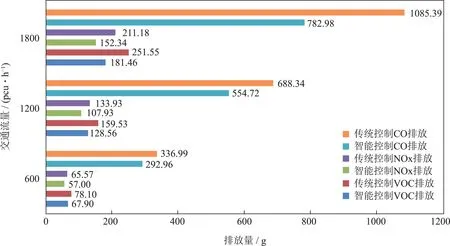
图10 不同交通流量下交叉口车辆污染物排放对比Fig.10 Comparison of vehicle pollutant emissions at intersection under different traffic flows
同时,仿真表明本文所提车速控制方法具有更为广泛的适用性,能够优化疏导交叉口随机车流,为直行和转弯车辆提供速度引导,提高交叉口通行效率.且相较于绿波车速引导策略,其不再受限于传统信号灯的控制,通过实时高效的时空间隙分配运算,能够为车辆提供更加碎片化、离散化的安全通行间隙,使冲突车辆在不同时间窗口通过冲突区,从而实现了交叉口时空资源的充分利用.
5 结论
本文利用车路协同环境下的信息实时采集与交互共享技术,基于时空间隙动态分配提出了一种智能交叉口车速控制方法,使车辆能够根据控制区域交通实况预先进行速度调整,实现不停车通过交叉口.在不同交通流量下对本方法控制效益进行仿真评估,证明该方法不仅可以有效缩短交叉口车辆延误,同时能够减少车辆油耗与污染物排放,促进绿色交通发展.
本研究所提控制方法是针对单点交叉口智能控制,未考虑区域多交叉口之间的协同控制问题,在后续工作中还需对此开展进一步的研究.随着泛在感知、网络传输、信息服务等新型基础设施在智慧交通领域的深度覆盖,新技术赋能下的城市交通管控终将向着数字化、网络化、智能化的方向变革,使得交通出行变得更加绿色安全、高效畅通.
猜你喜欢
建材发展导向(2022年14期)2022-08-19
北京航空航天大学学报(2022年5期)2022-06-06
小猕猴智力画刊(2022年4期)2022-05-25
物流科技(2022年2期)2022-05-07
汽车实用技术(2022年7期)2022-04-20
环球时报(2022-04-16)2022-04-16
建材发展导向(2021年19期)2021-12-06
中学生百科·大语文(2021年4期)2021-05-12
心理学报(2021年2期)2021-02-27
家庭科学·新健康(2021年2期)2021-02-22