用于SERF陀螺仪的半导体激光器自动稳频技术
2022-07-28 07:43:44庄铭今王天顺张文静秦德鑫刘院省
导航与控制 2022年2期
庄铭今,王天顺,张文静,黄 伟,秦德鑫,刘院省
(1.中国航天科技集团有限公司量子工程研究中心,北京 100094;2.北京航天控制仪器研究所,北京 100039)
0 引言
无自旋交换弛豫(Spin Exchange Relaxation Free,SERF)陀螺仪利用电子自旋在惯性空间的定轴性敏感载体转动信息,具有超高精度和小体积等特点,已成为惯性技术领域的研究重点和热点之一[1]。2005年,美国普林斯顿大学研制出了世界首台SERF陀螺仪[2]。半导体激光器作为SERF陀螺仪的核心器件,用于原子的极化和检测。半导体激光器易受环境温度、振动和磁场等因素干扰而造成激光频率的跳模和漂移,直接影响SERF陀螺仪的性能。
采用激光稳频技术可以将激光频率锁定在一个稳定的参考频率上来抑制激光频率的波动,常见的激光稳频方法有饱和吸收光谱(Saturated Absorption Spectra,SAS)稳频法[3]、双色激光稳频法(Dichoric Atomic Vapor Laser Lock,DAVLL)[4]和调制转移光谱(Modulation Transfer Spectroscopy,MTS)稳频法[5]等。目前,激光稳频技术已趋于成熟,但该系统易受外界干扰而发生失锁,国内外有不少研究机构进行了稳频系统长期稳定运行的研究。中国科学院基于嵌入式单片机为Rb喷泉原子钟搭建了一套长期全自动稳频系统,实现了系统长达一个月的稳定运行,将原子钟的长期稳定度提升到了10-16量级[6]。澳大利亚国立大学设计了一套基于Lab View的激光数字自动稳频技术,在光学薛定谔猫态的实验中,实现了50dB的噪声长期抑制效果[7]。
本文根据SERF陀螺仪的物理模型,定量分析了泵浦光频率漂移对陀螺仪输出稳定性的影响关系。为长期实现SERF陀螺仪激光光源每小时的频率漂移量小于1MHz的性能指标,搭建了一套激光饱和吸收稳频控制系统,并针对饱和吸收稳频系统易失锁的特点提出了一种利用饱和吸收峰值处“双峰”形状的快速自动回锁方法,系统失锁后实现快速自动回锁的功能使得激光频率长期保持锁定状态,为SERF陀螺仪的长期稳定运行奠定了基础。
1 泵浦激光频率对SERF陀螺仪稳定性的影响分析

在原子数高密度和零磁环境工作条件下,SERF陀螺仪碱金属原子的电子自旋工作于无自旋交换弛豫(SERF)状态[8]。此时,惰性气体原子的核自旋在特定条件下与碱金属原子的电子自旋强耦合,惰性气体原子的核自旋磁场能够自动跟踪并补偿外界磁场的变化,保持碱金属原子的电子自旋定轴性,敏感载体角运动信息。
采用Bloch方程组对SERF陀螺仪的完整数学描述进行大幅简化,其表达式如下[9]
式(1)中,Pe和Pn分别为碱金属原子的电子自旋和惰性气体原子的核自旋极化率,Rp和Rm分别为泵浦激光和探测激光的抽运率,和分别为碱金属原子的电子自旋和惰性气体原子核自旋的总弛豫率,和分别为电子自旋和核自旋的抽运率,sp和sm分别为泵浦激光和探测激光的光子角动量传递方位,γe和γn分别为碱金属原子的电子自旋和惰性气体的核自旋旋磁比,B为环境磁场,Be和Bn分别为碱金属原子的电子和惰性气体的核子产生的磁场,L为碱金属原子的电子自旋感受到的光位移,Q为减慢因子,Ω为载体系相对惯性系的转动角速度。
采用差分信号检测法的SERF陀螺仪输出信号S与探测光的偏振旋转角度θ成正比[10]

式(2)、式(3)中,A为放大系数,I为探测光强,l为原子气室的长度,n为原子气室的饱和蒸汽压密度,re为电子半径,c为光的传播速度,ν1和ν2分别为碱金属原子D1和D2线的跃迁频率,ν为探测光频率。
由式(2)、式(3)可得,SERF陀螺仪的标度因数为

由式(4)可知,在探测光频率和功率不变的情况下,陀螺仪的标度因数稳定性与碱金属原子的电子横向极化率直接相关。通过求解式(1),得到的表达式

当Rp=Rrex时,SERF陀螺仪的输出信号强度最强,灵敏度最高。由式(4)和式(6)可得泵浦激光的抽运率Rp的波动引起标度因数KRp的变化为

泵浦激光的抽运率Rp为

式(8)中,P为泵浦激光功率,h为普朗克常数,C为泵浦激光的光斑面积,νp为泵浦光频率,ν0为原子跃迁频率,Γ为碱金属原子的谱线线宽。在泵浦激光功率P不变的情况下,根据式(7)和式(8)可以得出泵浦激光频率νp的变化引起的陀螺标度因数变化ΔKRp为

取Γ=14.83GHz、ν0=377365GHz,根据式(9)进行的仿真结果如图1所示。由图1可知,当泵浦激光频率νp偏离原子跃迁频率ν0有100MHz时,陀螺标度因数的非线性度变化量达到1.8×10-4。SERF陀螺仪一般采用DBR激光器作为激光光源,激光频率1h的漂移量大于200MHz,其随机本底噪声为百千赫兹量级,因此可以采用激光饱和吸收稳频技术使激光频率的漂移量抑制在1MHz以内,在理论上将激光频率漂移造成陀螺仪标度因数的变化量降低至2.0×10-6以内。

图1 SERF陀螺仪标度因数随泵浦激光频率波动仿真图Fig.1 Simulation diagram of SERF gyroscope scale factor fluctuation with pump laser frequency
2 饱和吸收稳频原理
饱和吸收稳频法利用激光光束在碱金属气室中对射来获得饱和吸收光谱,通过稳频控制电路将激光频率锁定在特定的饱和吸收峰上,其基本光路结构如图2所示[11]。
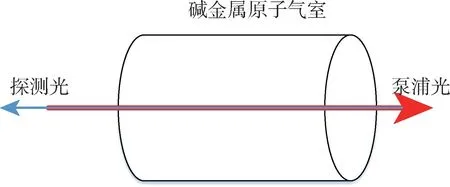
图2 饱和吸收光路图Fig.2 Optical path of saturated absorption
当激光光束在碱金属气室中单向传播时,沿各个方向运动的原子吸收特定频率范围内的激光,形成具有Doppler展宽的吸收线型,如图3(a)所示。当激光光束在碱金属气室中对射时,受Doppler效应影响,只有沿着与光束传播方向垂直运动的原子可以同时吸收泵浦光和探测光,其中大部分原子被较强的泵浦光激励到激发态,使得较弱的探测光被少量吸收,在参考频率附近形成向上凸起的饱和吸收峰,即饱和吸收光谱,如图3(b)所示。将光谱信号转换成电信号输入到稳频控制电路,通过PID控制器根据由锁相放大器获得的误差信号动态调节激光器注入电流,使得激光器稳定在参考频率上[12]。
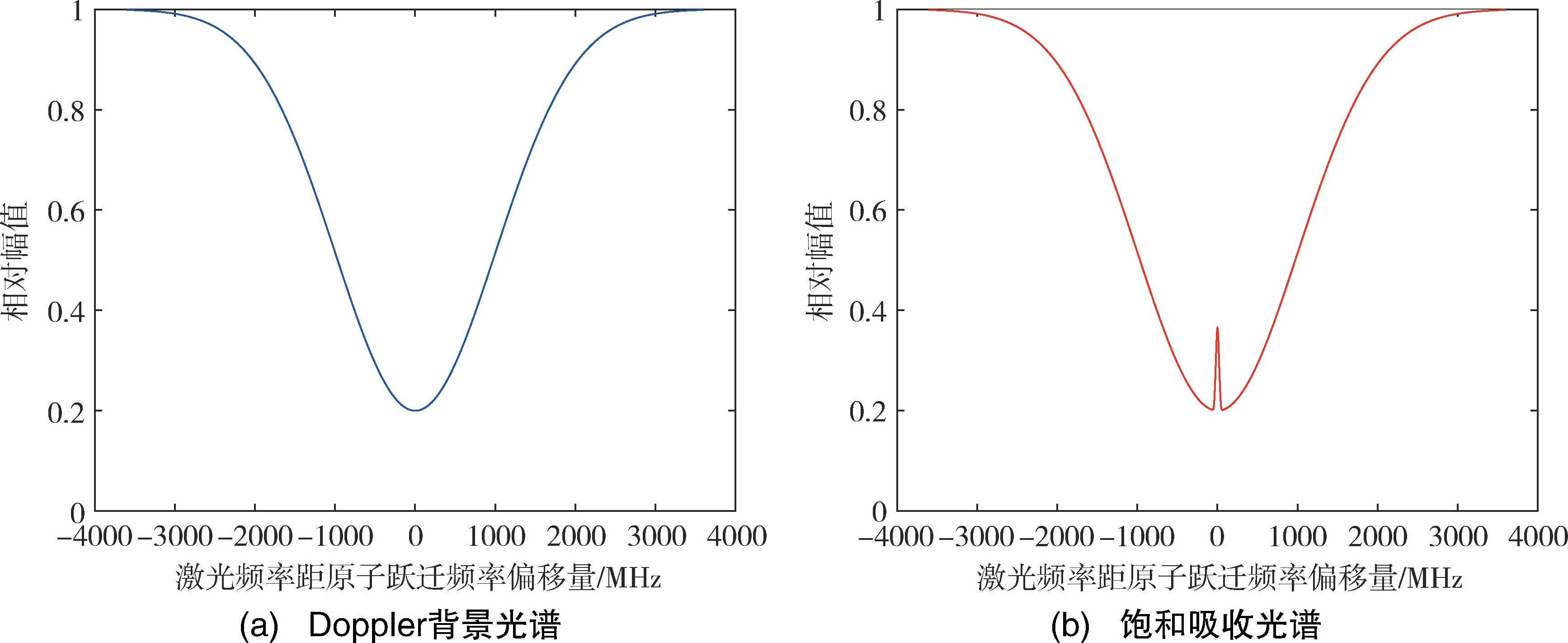
图3 原子吸收光谱曲线Fig.3 Curves of atomic absorption spectrum
3 基于饱和吸收光谱的自动稳频系统设计
3.1 光路及电路系统设计
SERF陀螺仪常用的激光光源是DBR半导体激光器,针对DBR激光器设计的饱和吸收稳频光路系统如图4所示。通过三角波发生器向激光控制器注入电流扫描信号,激光经过1/2波片和偏振分束棱镜后,透射光较强作为SERF陀螺仪的工作激光,反射光穿过Rb原子气泡,经1/4波片和反射镜反射后在Rb原子气室中形成两束相向传播的激光,穿过偏振分束棱镜在光电探测器上产生饱和吸收光谱信号。
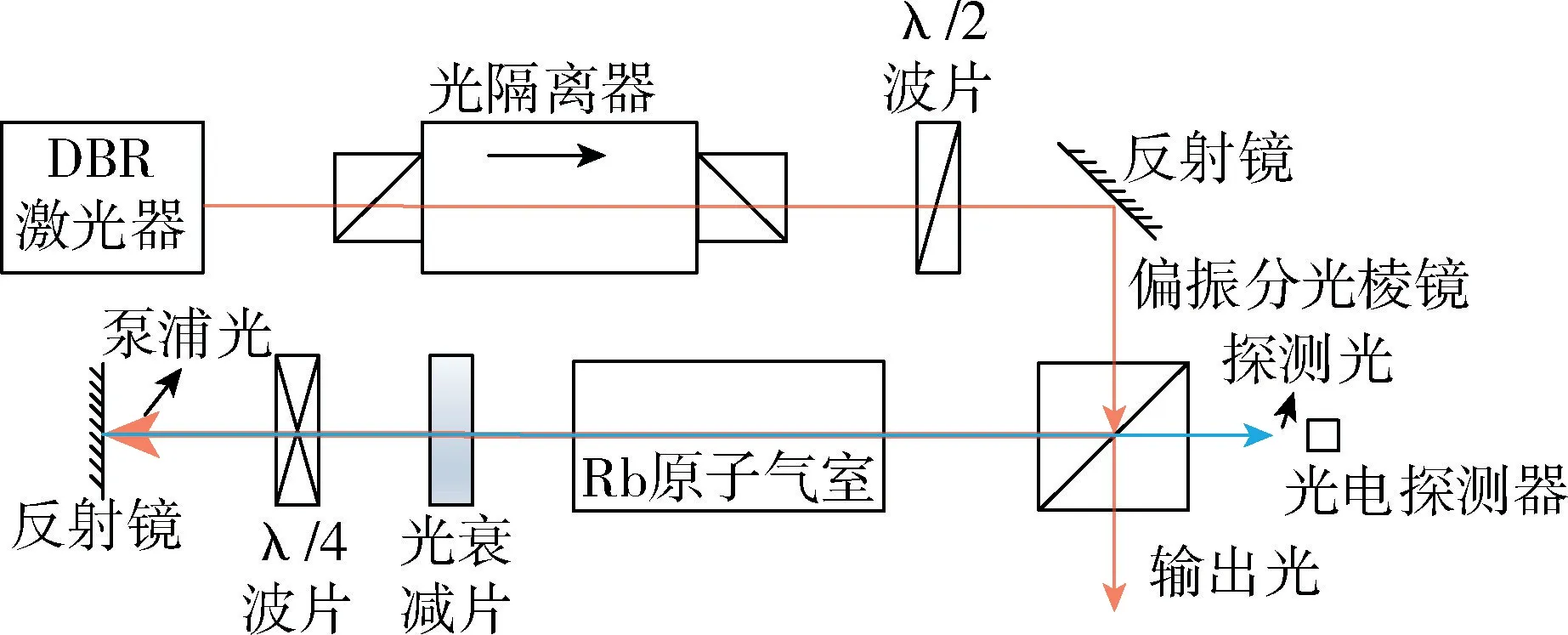
图4 饱和吸收稳频光路系统示意图Fig.4 Schematic diagram of saturated absorption frequency stabilization optical system
激光饱和吸收稳频电路系统由激光器驱动控制电路和激光稳频控制电路组成。首先由激光器驱动电路给激光器加入扫描信号,激光经过饱和吸收光路可获得饱和吸收光谱。激光稳频电路给激光注入电流加入10kHz的正弦调制信号后,将带有调制信号的饱和吸收光谱与参考信号相乘作相敏检波处理。最后获得的误差信号传输给PID控制器,调节激光器注入电路,实现激光稳频控制。稳频电路系统的基本框架图如图5所示。
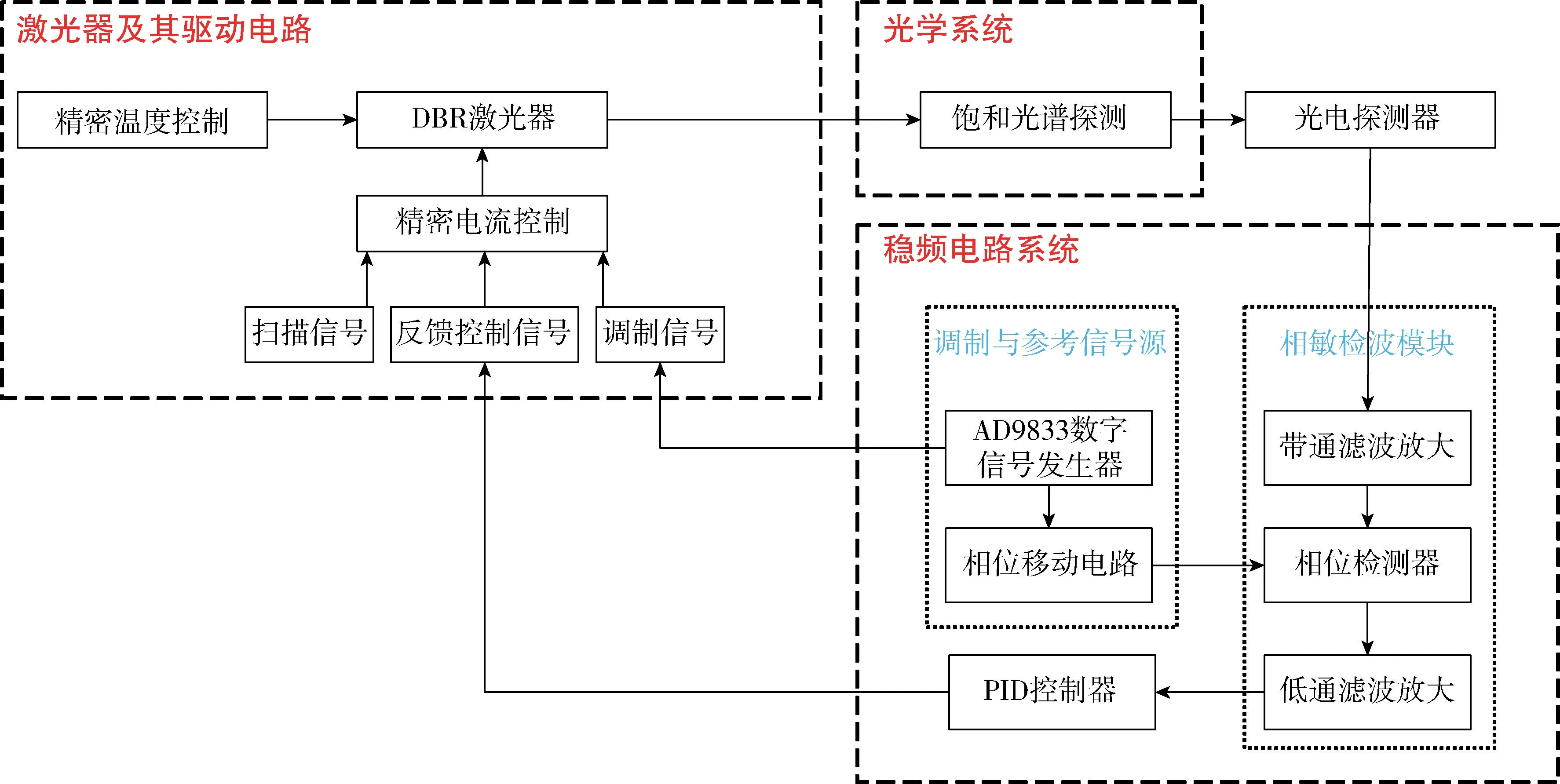
图5 稳频电路系统基本框架图Fig.5 Basic frame diagram of frequency stabilization circuit system
3.2 自动稳频程序设计
一般情况下,Rb原子饱和吸收峰的半高宽不大于10MHz,而DBR激光器的温度控制仅采用TEC制冷片实现,容易受到环境温度波动的影响,以及由于外界环境振动带来的电流脉冲,都会使激光频率偏离饱和吸收峰,导致系统处于失锁状态。设计自动稳频控制程序可以在无人工干预的情况下实现系统的自动回锁。
传统的自动稳频控制程序思路为:首先加载三角波扫描信号找到所有饱和吸收峰,接着将目标峰调整至扫描信号中心位置,最后以直流信号的方式将计算得到的调整值加载到激光器驱动电流上[13]。由于87Rb原子52S1/2轨道的两个子能级裂距较大(约6835MHz),采用该方法会占用大量的回锁时间,同时导致系统输出严重偏离目标频率。对此,本文提出了利用饱和吸收峰值处“双峰”形状的判定回锁方法,可以减小系统输出误差,降低控制程序的复杂程度并实现快速回锁功能。
由于饱和吸收峰有着极窄的线宽,因此加载调制信号后在峰值点处接收到的光谱信号在一个调制信号周期内会畸变成一种“双峰”形状,如图6所示。通过计算在一个调制信号周期内是否存在两个尖峰以及光谱信号幅值的大小,即可判断出系统是否处于失锁状态。自动回锁程序的流程图如图7所示。

图6 饱和吸收峰值处的“双峰”形状Fig.6 Diagram of bimodal shape at saturated absorption peak

图7 自动回锁程序流程图Fig.7 Flowchart of automatic locking program
通过STM32芯片内置ADC以200kHz的采样频率对光谱信号进行采样,进行一阶差分运算后消除光谱信号中的直流分量。采用过零检测的方法,计算在一个调制信号周期内出现的过零点个数,1个即为系统失锁,进入自动回锁程序,否则继续监控系统状态。自动回锁程序在当前驱动电流基准值上下等间隔扫描,直到系统恢复锁频状态,否则重复锁频步骤。如果重复锁频步骤超过3次系统仍未回锁,则退出自动回锁程序。
4 饱和吸收稳频系统测试结果及分析
4.1 测试结果
通过激光饱和吸收稳频系统将泵浦激光频率锁在87Rb原子的52S1/2:F=2→52P1/2:F=2的跃迁谱线上,采用波长计对激光稳频系统输出频率进行测量,采样率为40Hz,连续采集了5h左右的开环和闭环测试数据对比结果如图8所示。
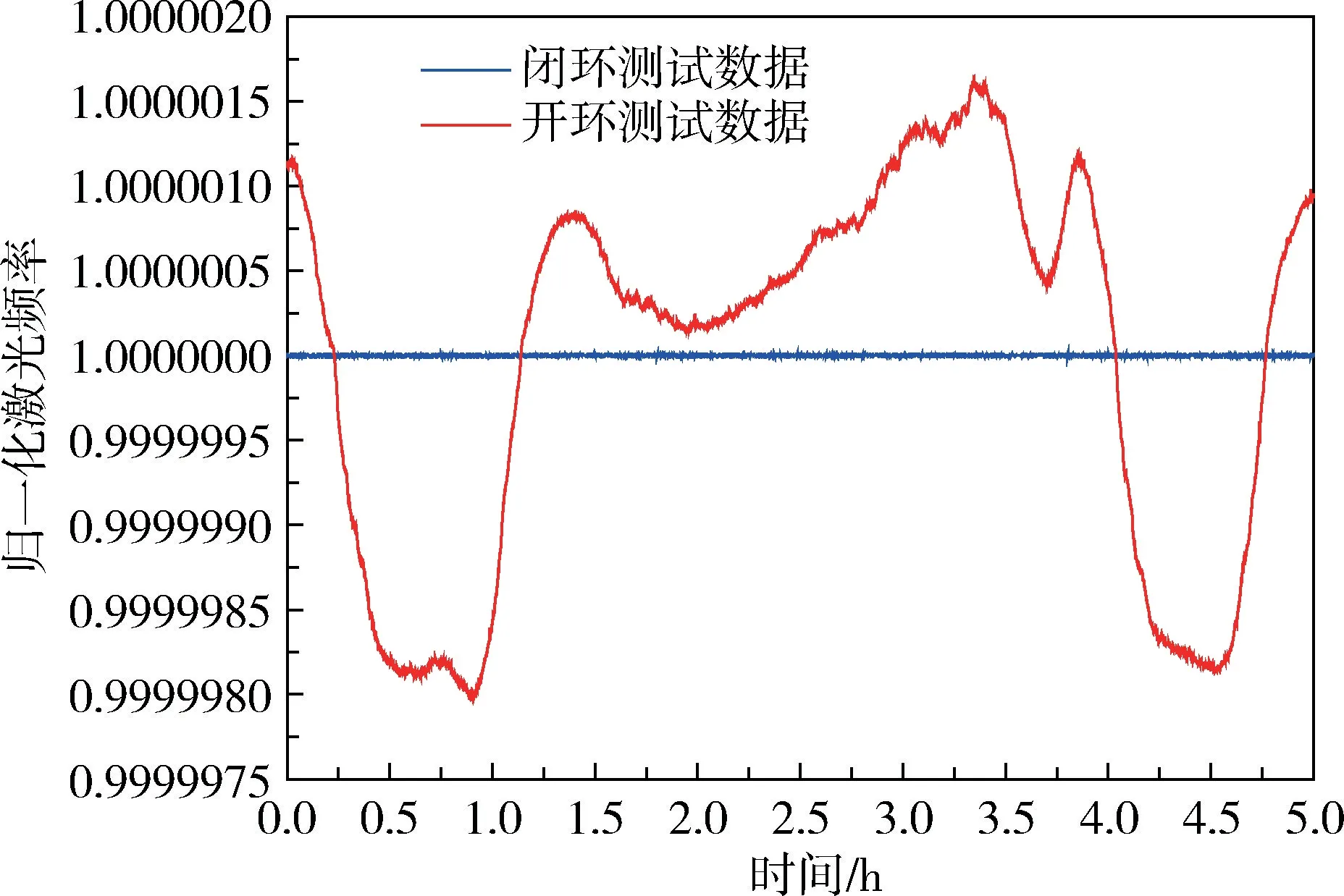
图8 激光饱和吸收稳频系统测试结果Fig.8 Test results of laser saturated absorption frequency stabilization system
为测试稳频系统的自动回锁功能,人为地敲击实验平台使激光器失锁,系统在失锁后自动回锁的过程如图9所示。由图9可知,系统在失锁后0.5s左右重新恢复至锁频状态。
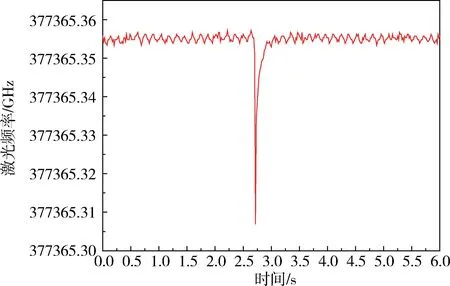
图9 稳频系统自动回锁过程Fig.9 Automatic locking process diagram of frequency stabilization system
4.2 数据分析
采用Allan方差的计算方法对激光饱和吸收稳频系统控制的激光频率稳定性进行定量的测量分析,定义Allan方差的计算公式为[14]
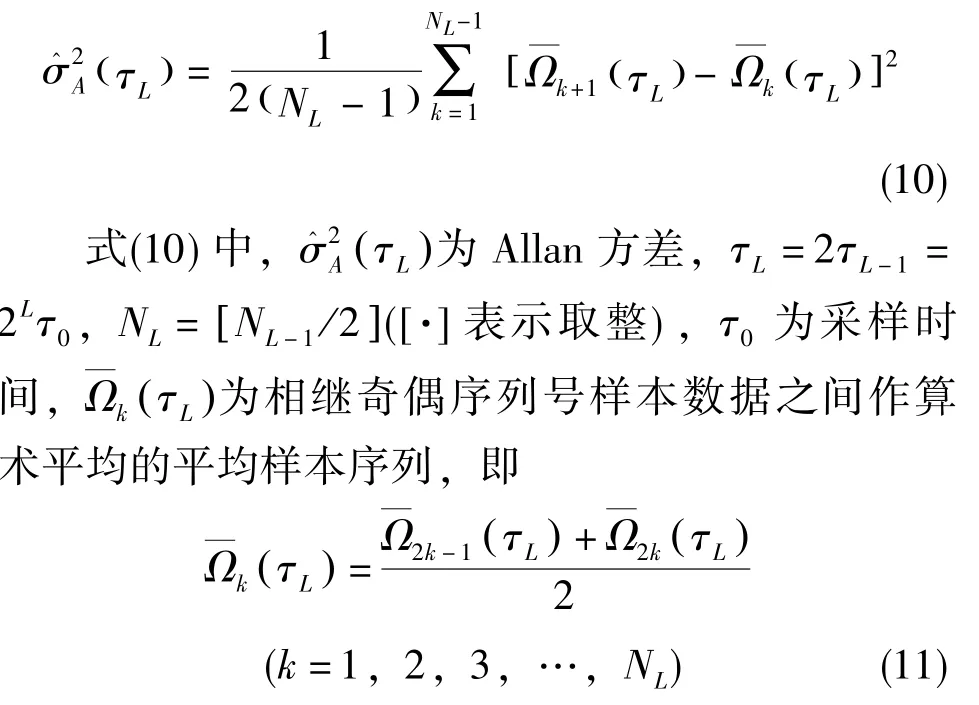
将测量得到的开/闭环采样数据进行1s平滑后代入式(10)中,获得一系列的点对τi~σ^2A(τi)(i=1,2,3,…,L),绘制成激光稳频系统开/闭环Allan方差结果对比图,如图10所示。由图10可知,闭环状态下激光饱和吸收稳频系统在平均采样时间为128s时得到的Allan方差σ为8.133×10-11。
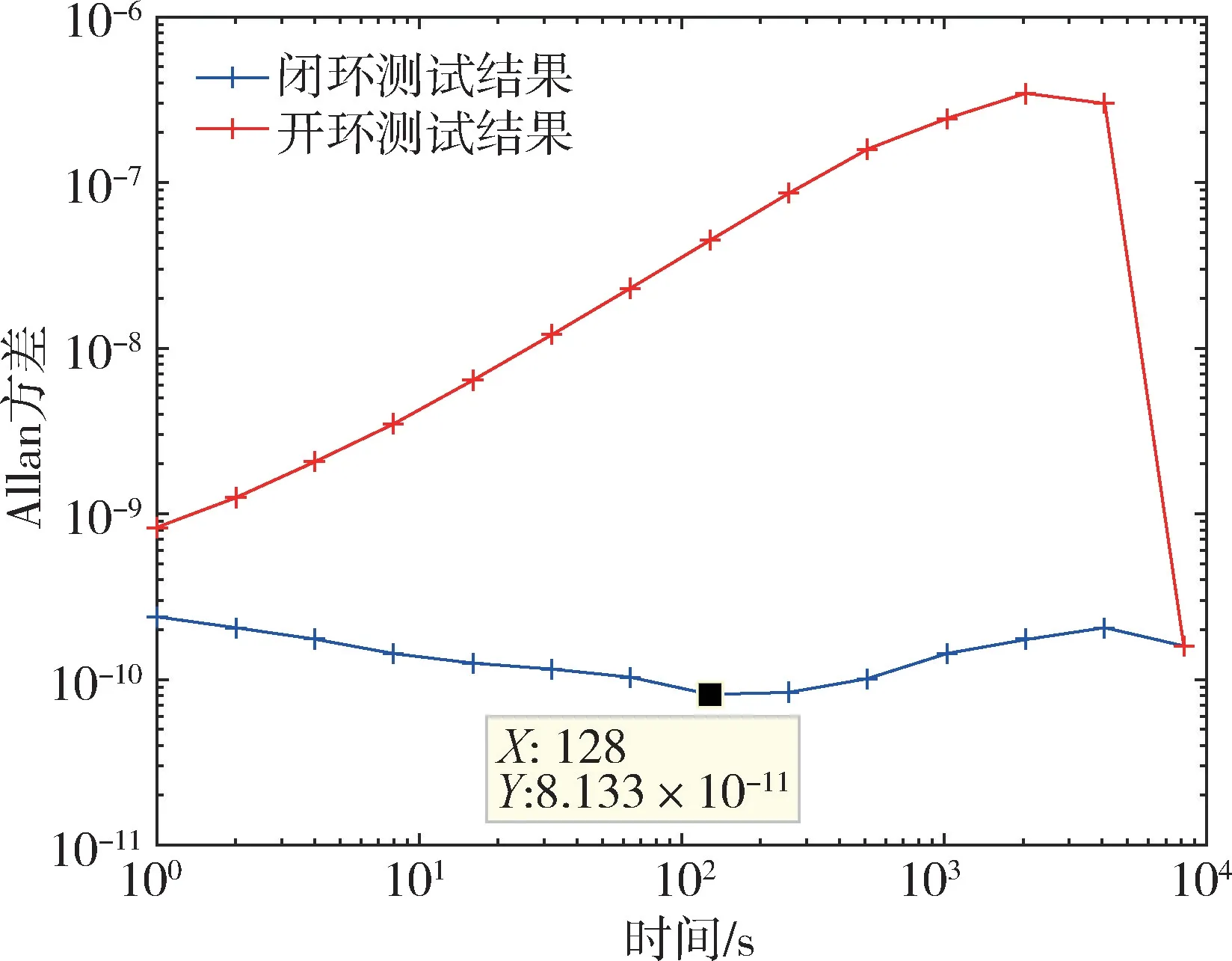
图10 激光饱和吸收稳频系统开/闭环Allan方差结果对比图Fig.10 Comparison of Allan variance results of laser saturated absorption frequency stabilization system at the state of open/closed loop
为分析激光饱和吸收稳频系统输出频率的短期稳定性,取闭环测试结果中1h的采样数据并计算标准差,计算得到的激光频率的漂移量大约为308kHz,理论上可以使激光频率的漂移对SERF陀螺仪标度因数非线性度的影响控制在1×10-6以下。
5 结论
由SERF陀螺仪物理模型的仿真结果可知,泵浦激光频率的稳定性会直接影响SERF陀螺仪的性能,激光器自动稳频技术是实现高性能原子陀螺仪的重要技术途径。本文研制了一套DBR激光器饱和吸收稳频系统,并提出了一种系统快速自动回锁的方法,为SERF陀螺仪惯导系统在长期无人干预的情况下实现稳定运行奠定了基础。在下一步工作中,还需考虑在不影响激光频率的前提下,实现激光功率稳定度优于0.1%的闭环稳定控制,进一步降低激光光源扰动对SERF陀螺仪性能的影响。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
读写算(2020年32期)2020-12-17 06:38:28
科技创新与应用(2019年8期)2019-06-27 01:48:48
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
文物保护与考古科学(2017年3期)2017-01-28 08:29:37
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
哈尔滨师范大学自然科学学报(2015年4期)2015-09-09 09:45:42
中学化学(2015年5期)2015-07-13 07:41:41
中学化学(2015年5期)2015-07-13 07:36:59