基于CPLD的直流无刷电机控制系统设计
2022-07-28 07:43黄朝丽
导航与控制 2022年2期
黄朝丽,王 晴,马 俊
(陕西航天时代导航设备有限公司,宝鸡 721006)
0 引言
随着科学技术和工业化的快速发展,工业自动化程度日益加深,电机的应用领域不断扩大,电力电子技术、微机控制技术和控制理论的发展更促进了电机调速技术的发展。随着新的电力电子器件、高性能的数字集成电路以及先进的控制理论的应用[1],控制部件功能日益完善,所需的控制器件数目越来越少,控制器的可靠性提高而成本日益降低,从而使得直流无刷电机不再局限于传统的工业应用领域[2],而逐渐向机器人、数控机床、雷达和各种军用武器随动系统等领域拓展。然而,目前直流无刷电机控制方法大多采用单片机等嵌入式软件方式来实现,由于软件可靠性等问题,已不能完全满足系统复杂环境的使用要求。
20世纪80年代以来,国内外对直流无刷电机的研究主要转移到电子换向、稀土永磁材料以及智能控制三个方面,试图来抑制直流无刷电机的转矩波动[3]。除此之外,随着电机及驱动系统的发展,控制系统趋于智能化和数字化,使得许多较复杂的控制技术得以实现,又进一步推动了直流无刷电机在各个领域的更好应用[4]。
针对某型舵机系统在整机使用环境中存在大功率发射瞬间的干扰信号,以往嵌入式软件设计会因强干扰信号而导致软件跑飞等问题,本文设计了一种基于复杂可编程逻辑器件(Complex Programmable Logic Device,CPLD)的直流无刷电机控制系统。利用CPLD的硬件可编程和实现逻辑运算方便的特点,用一片CPLD代替原有十几片逻辑门和部分模拟电路[5],采用VHDL语言编程实现电机的逻辑控制[6],不但简化了硬件电路设计,还可实现在线编程,方便了系统参数的调试。
1 控制系统总体设计
1.1 系统总体方案设计
控制系统的总体方案为:根据给出的调速码、方向信号以及限位开关信号并结合电机转子位置传感器的输出信号,经CPLD进行逻辑综合处理后,产生PWM调宽波和逻辑控制信号,再通过驱动放大电路进行功率放大,向功率开关管提供使其饱和导通和可靠关断的驱动信号,驱动电机按照规定的转速和极性旋转,最终实现电机的闭环控制[7-8]。系统总体设计包括硬件电路设计和软件设计两大部分,控制系统原理框图如图1所示。

图1 控制系统原理框图Fig.1 Principle block diagram of control system
1.2 直流无刷电机驱动原理
直流无刷电机是由电机本体、转子位置传感器和电子换相电路组成的一个闭环系统。与一般的有刷电机不同,直流无刷电机的定子为电枢绕组,转子采用永磁体[2]。本文介绍的无刷电机采用了三相星形联结的全控电路,其基本构成如图2所示。
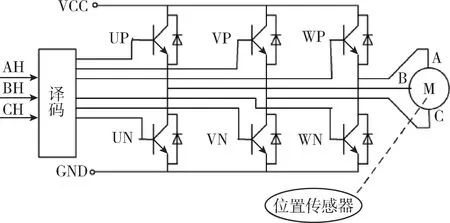
图2 直流无刷电机基本构成Fig.2 Basic composition of brushless DC motor
其换相电路为6个功率开关器件(IGBT或功率MOSFET)组成的三相逆变电路,当接受到外部输入的逻辑控制信号后进行译码,进而去驱动与电枢绕组连接的相应的功率开关器件进行饱和导通和可靠关断,使A、B、C三相绕组能按要求的顺序导通,实现定子绕组的正确换相,从而保证电机的可靠运行[3]。
2 硬件电路设计
系统硬件电路设计包含电源电路、控制信号调理电路、CPLD控制单元、隔离驱动电路和功率放大电路五个部分的电路设计。
2.1 电源电路
电源电路将系统提供的一次电源进行变换后给控制系统内部信号调理电路、CPLD控制单元、隔离驱动电路和功率放大电路各芯片供电,确保各电路正常工作,系统电源电路原理框图如图3所示。

图3 电源电路原理框图Fig.3 Principle block diagram of power supply circuit
电源电路选用带隔离输出的DC/DC电源转换器模块,输入电压范围为16VDC~50VDC,输出为15V/1A和5V/1A,两路电压完全隔离,内部各电源都放置去耦电容滤波,在电源给各芯片供电时,加磁珠来衰减电磁干扰信号,主要信号线之间加磁珠来衰减干扰信号,用隔离DC/DC将驱动地和控制地完全隔离。
在DC/DC输入端加一级EMI电源滤波器来衰减电源线上的干扰信号,滤波器的额定电压达到50VDC。为了防止瞬时过压脉冲,电源的进入端加TVS管,从而有效保护了电子线路中的精密元器件免受损坏。
2.2 控制信号调理电路
电机控制信号主要包括调速信号、方向信号和限位开关信号。其中,调速信号和限位开关信号均为数字信号,设计时通过高速光耦隔离、电平转换等电路处理后直接进入CPLD控制电路进行逻辑综合;换向信号为模拟信号,必须经过前端调理电路转换为数字信号后才能进入CPLD进行处理。控制信号调理电路原理框图如图4所示。

图4 控制信号调理电路原理框图Fig.4 Principle block diagram of control signal conditioning circuit
针对方向控制信号+5V、0V、-5V,为了满足阻抗匹配的作用,设计了一电压跟随器,同时具有二阶有源滤波器的功能,滤波器的截止频率为1.6kHz。再采用逻辑偏移电路转换为0V~3V的电压信号,最后通过窗口比较器变换为两路电平信号进入CPLD进行处理。
2.3 CPLD控制单元
CPLD控制单元是控制系统的核心,其主要功能为接收电机控制信号(包括调速信号、方向信号、限位信号)以及电机转子位置反馈信号(霍尔传感器输出信号),进行逻辑综合运算后产生PWM调宽波和逻辑控制信号提供给功率放大电路,控制电机三相电枢正确换相,使电机正常运行。CPLD控制单元功能框图如图5所示。

图5 CPLD控制单元功能框图Fig.5 Function block diagram of CPLD control unit
经对CPLD实现功能和资源进行评估,选用型号为EPM1270T144I5N的CPLD芯片。该器件工作温度范围为-40℃~+105℃,内部有1270个逻辑单元,等效宏单元数为980,供电电压为3.3V或2.5V,TQFP-144封装,最大工作频率为304MHz,器件静态功耗为150mW[1-2]。通过对CPLD代码进行编译综合后,CPLD硬件资源占用比例为37%,占用CPLD宏单元数为362,占用CPLD管脚数为88,管脚资源占用比例为61%,可以满足系统设计所需资源和I/O要求。
2.4 隔离驱动电路
隔离驱动电路包括光电隔离电路和栅极驱动电路,光电隔离电路的作用是对CPLD控制电路输出的PWM控制信号进行电气隔离;栅极驱动电路用于增强控制信号的驱动能力,并最终输出控制电压给三相逆变电路[9]。
PWM信号的电气隔离采用高速光电耦合芯片TLP2116,该芯片的最大延迟时间为30ns,适合于电气控制场合。栅极驱动电路采用两片专用脉宽驱动集成芯片IR2108S控制H桥中的四个MOSFET,该芯片的应用简化了驱动电路的设计。IR2108S内部采用自举技术设计出悬浮电源,实现了一相两个N沟道逆变桥输出电路的控制[10]。该芯片供电电压范围为:+10V~+20V,静态消耗电流最大为1.6mA,设计供电电压为+15V。隔离驱动电路原理图如图6所示。

图6 隔离驱动电路原理图Fig.6 Schematic diagram of isolation drive circuit
2.5 功率放大电路
功率放大电路将多个功率开关器件集成到一起,广泛应用于无噪声逆变器、低噪声UPS和伺服控制器中[10]。系统由6只功率MOSFET组成,每两只对应电机的一相绕组,来实现驱动电机所需的三相逆变电路[11],其额定负载电流为33A,额定控制电压为100V。另外还设计了电流检测电路,该电路使用大功率采样电阻将流经电机绕组的电流信号转换成电压信号,经二阶滤波和放大,再与基准电压比较后输出脉冲信号,经光耦隔离反馈给CPLD起到限流作用。功率放大电路的原理图如图7所示。
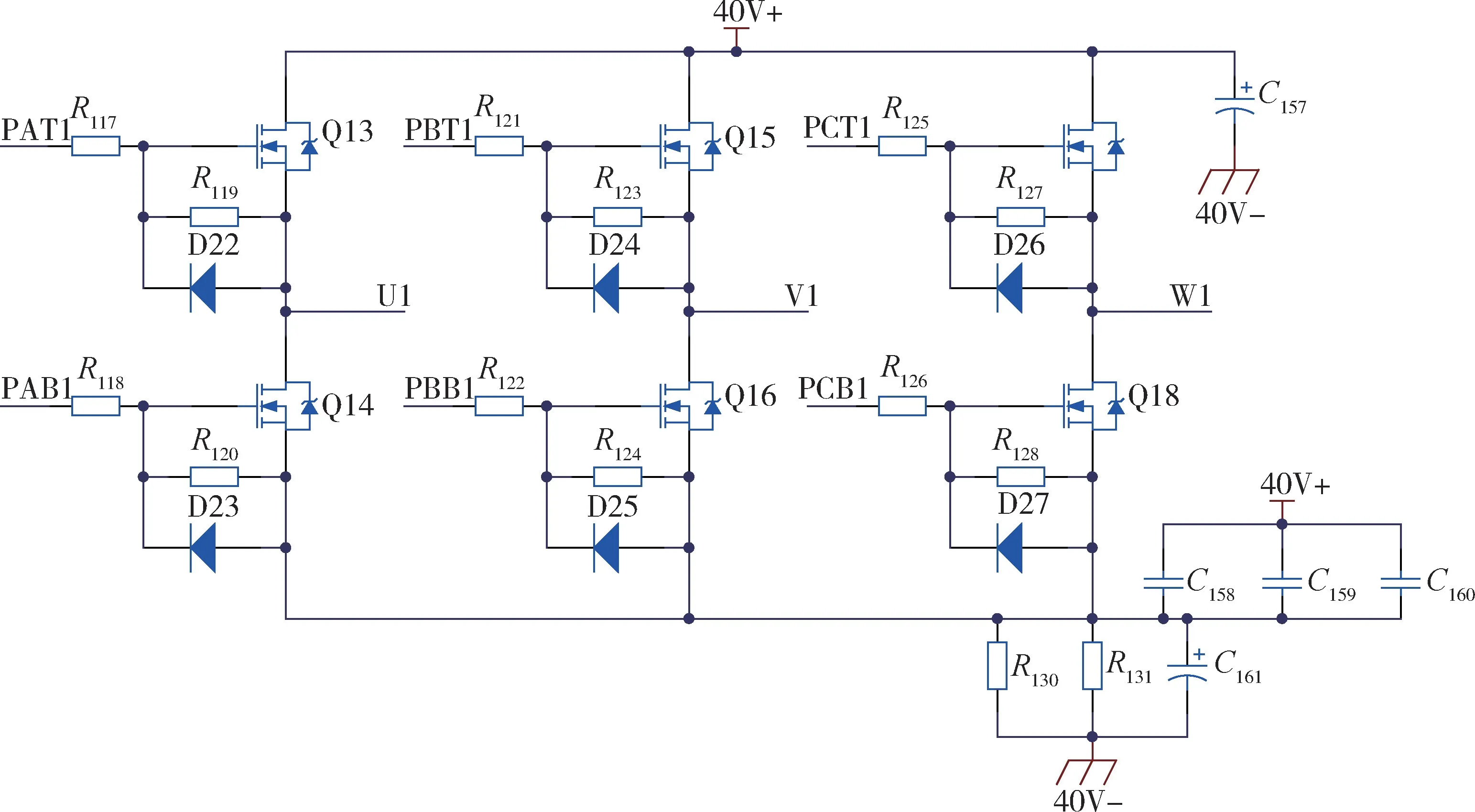
图7 功率放大电路原理图Fig.7 Schematic diagram of power amplification circuit
3 系统软件设计
系统软件设计主要在以CPLD为核心的平台上进行,包括:I2C通信接口、查找表、PWM调宽波发生器和逻辑组合单元4个部分。
系统软件功能框图如图8所示。
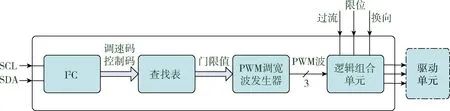
图8 系统软件功能框图Fig.8 Function block diagram of CPLD control unit
3.1 I2C通信接口
I2C通信接口用来接收上位机发送的调速码数据,并将获得的控制码及调速码送至查找表。
根据系统I2C通信协议,采用状态机来实现I2C通信接口功能。状态机逻辑图如图9所示。
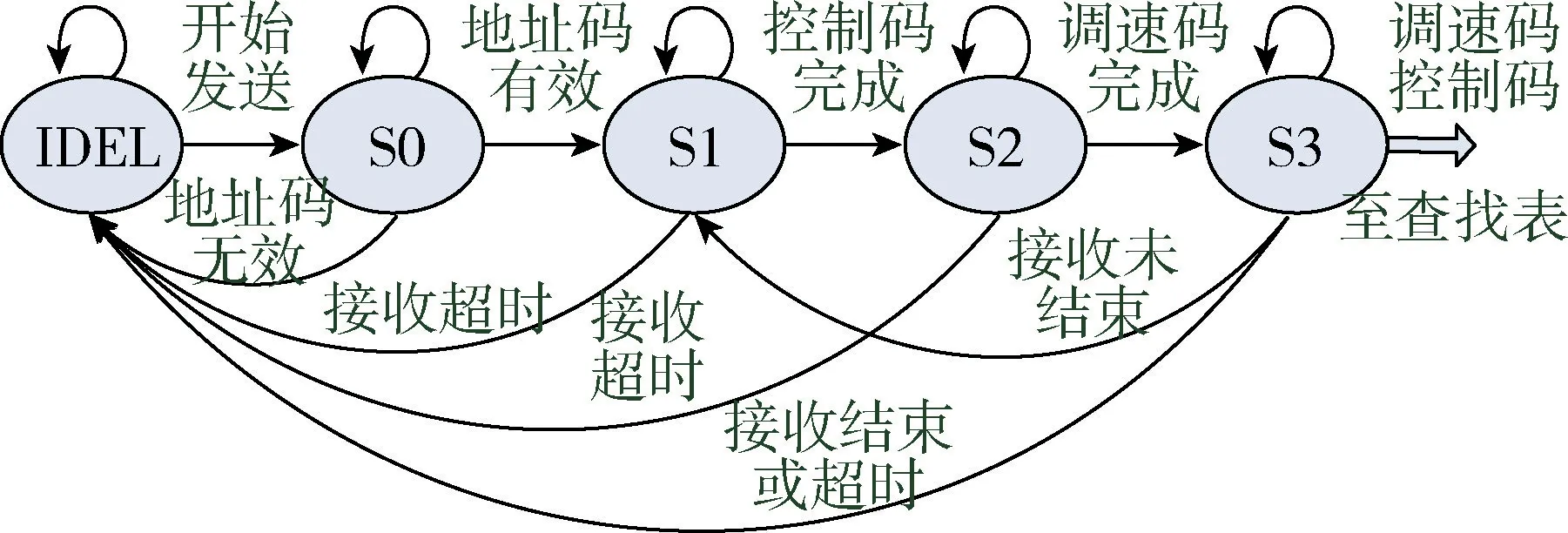
图9 I2C通信接口状态机逻辑图Fig.9 Logic diagram of I2C communication interface state machine
状态机各状态含义如下:
(1)IDEL:初始状态
此时,I2C通信接口不断捕捉SCL和SDA端电平变化,一旦捕捉到调速码发送开始状态(即SCL为高,且SDA下降沿到达),状态机立即跳转到S0状态。
(2)S0:接收地址码
在每个SCL上升沿时刻,对SDA电平进行采样,采样完成后地址码接收结束,并判断该地址码是否有效。当地址码有效时,则立即跳转到S1状态;当地址码无效时,则跳转到IDEL状态。
(3)S1:接收控制码
地址码有效后,开始接收控制码。在每个SCL上升沿时刻,对SDA电平进行采样,采样完成后控制码接收结束,状态机跳转至S2状态。
(4)S2:接收调速码
控制码接收结束后,开始接收调速码。在每个SCL上升沿时刻,对SDA电平进行采样,采样完成后调速码接收结束,状态机跳转至S3状态。
(5)S3:更新控制码及调速码
当一组控制码及调速码接收完成后,将当前接收到的控制码和调速码同时发送至查找表,并判断接收是否完成。若接收未结束,则跳转至S1继续接收下一组控制码;若接收结束,则跳转至IDEL等待下一次调速信号到达。
为避免通信异常,在状态机中设有超时复位跳转。当接收开始后一定时间内状态机未有效接收到数据,则跳转至初始状态,重新等待上位机发送调速信号。
3.2 查找表
查找表用来建立调速码信号与PWM调宽波发生器反转门限值占空比之间的对应关系,并根据控制码和调速码分别更新三个PWM调宽波发生器反转门限值。
上位机提供的为调速码信号,而最终输出的信号为PWM调宽波,在调速码与PWM调宽波发生器反转门限值之间存在一一对应关系,这种对应关系可通过查找表来实现。查找表以调速码为地址,该地址所保存的数据则为调速码对应的PWM调宽波反转门限值。查找表依据接收到的调速码给出相应的反转门限值,送至PWM调宽波发生器单元。查找表功能框图如图10所示。
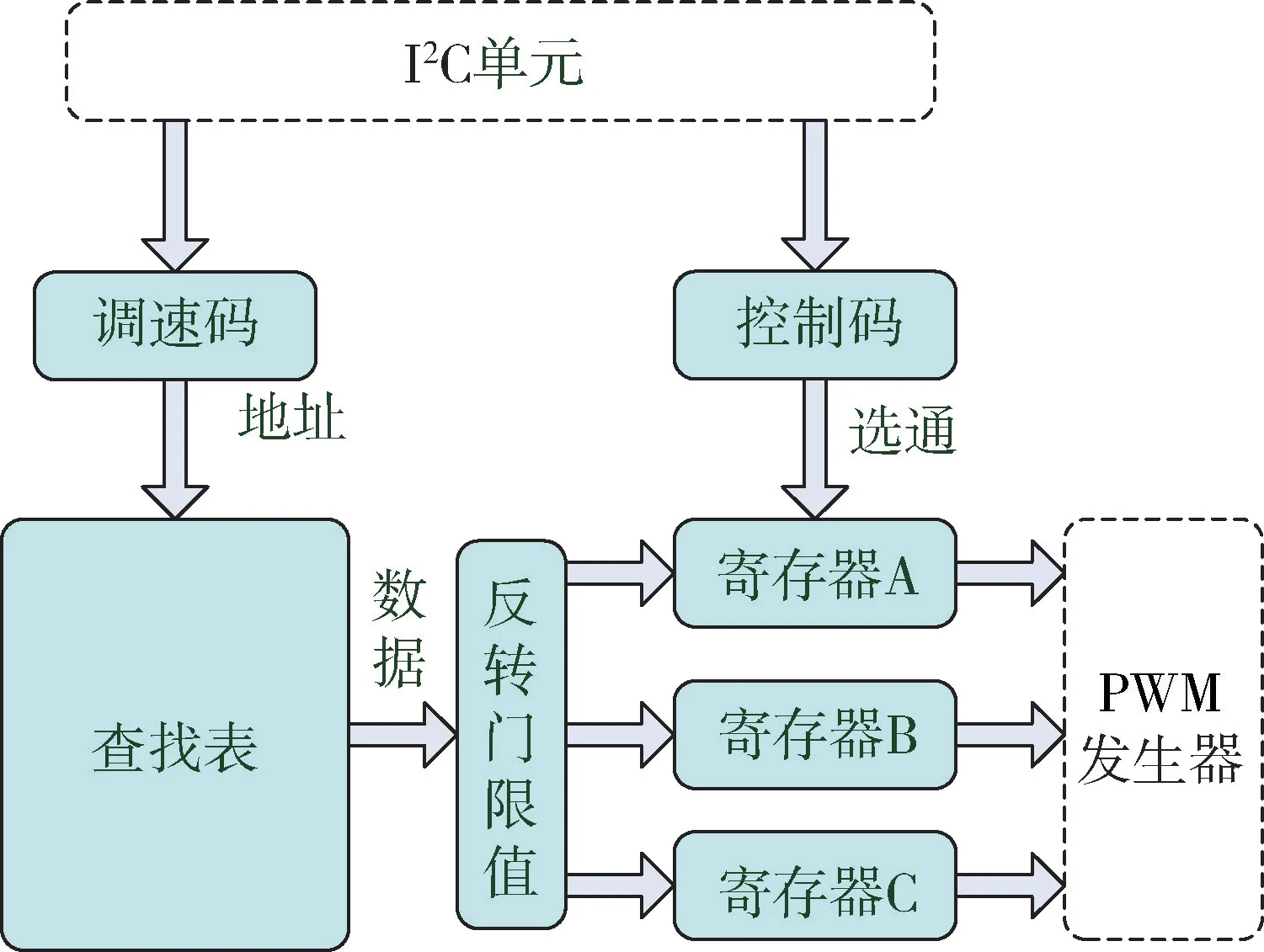
图10 查找表功能框图Fig.10 Function block diagram of lookup table
3.3 PWM调宽波发生器
PWM调宽波发生器由1个计数器和3个比较器组成,3个比较器的门限值分别对应查找表给出的3个反转门限值。
计数器计数值达到计数上限后自动清零,重新开始计数。在计数过程中,计数器计数值与反转门限值进行比较:当计数值小于某反转门限值时,则对应的PWM调宽波信号为“高”电平;当计数值大于等于某反转门限值时,则PWM调宽波信号反转为“低”电平,最终产生PWM调宽波输出。
PWM发生器的逻辑框图如图11所示。
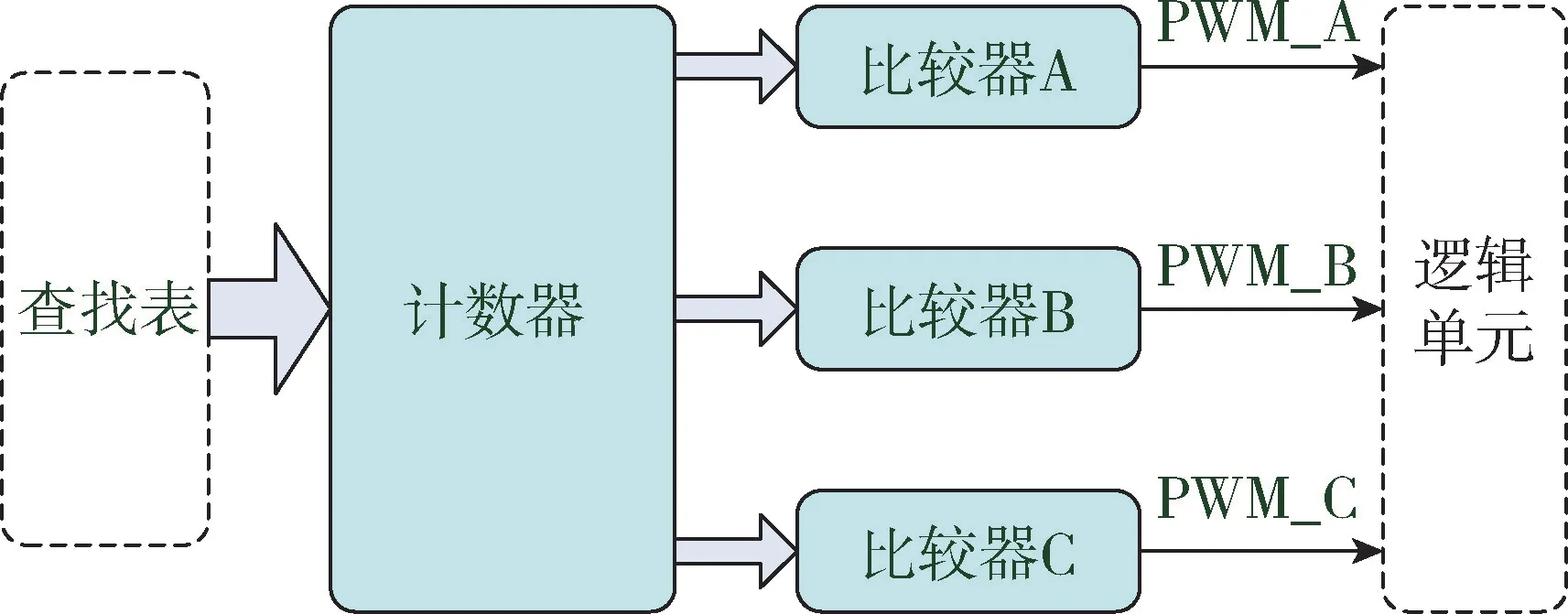
图11 PWM发生器逻辑框图Fig.11 Logic block diagram of PWM generator
3.4 逻辑组合单元
逻辑组合单元根据3路PWM调宽波以及方向、限位等信号并结合电机的位置传感器输出信号,经逻辑组合后,为驱动单元提供逻辑控制信号。
换向信号与限位信号的逻辑组合如表1所示。
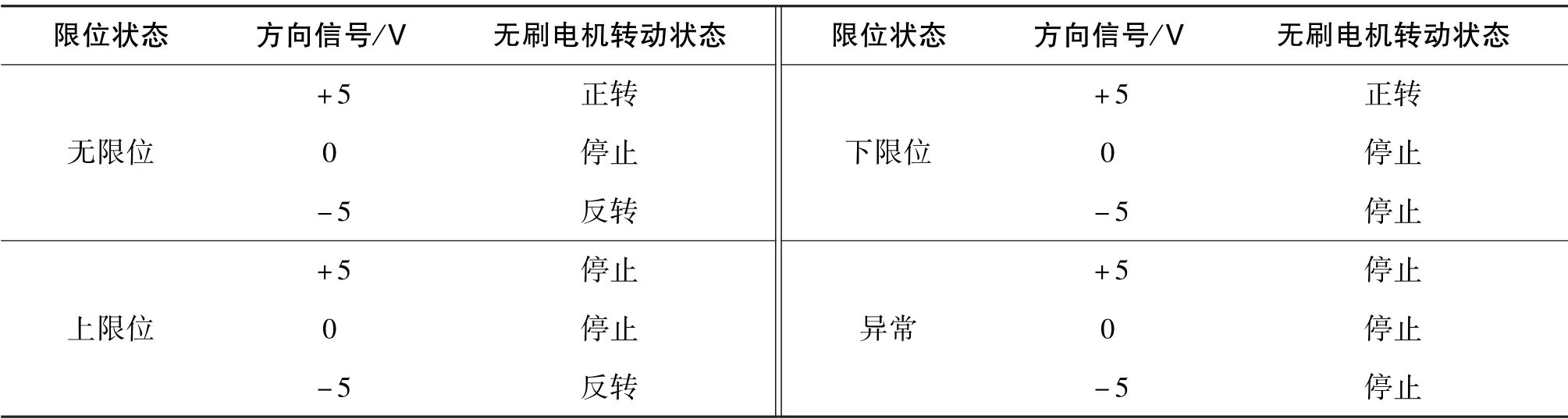
表1 换向信号与限位信号逻辑组合表Table1 Logical combination form of reversing signal and limit signal
4 系统试验与结果分析
搭建系统测试平台,使用工控机、数字电压表、示波器、数字测速表及专用测试设备对系统进行方向控制、空载转速、空载电流、动态响应时间及负载转速等性能测试,测试系统组成及测试条件如表2所示,系统测试平台组成如图12所示。
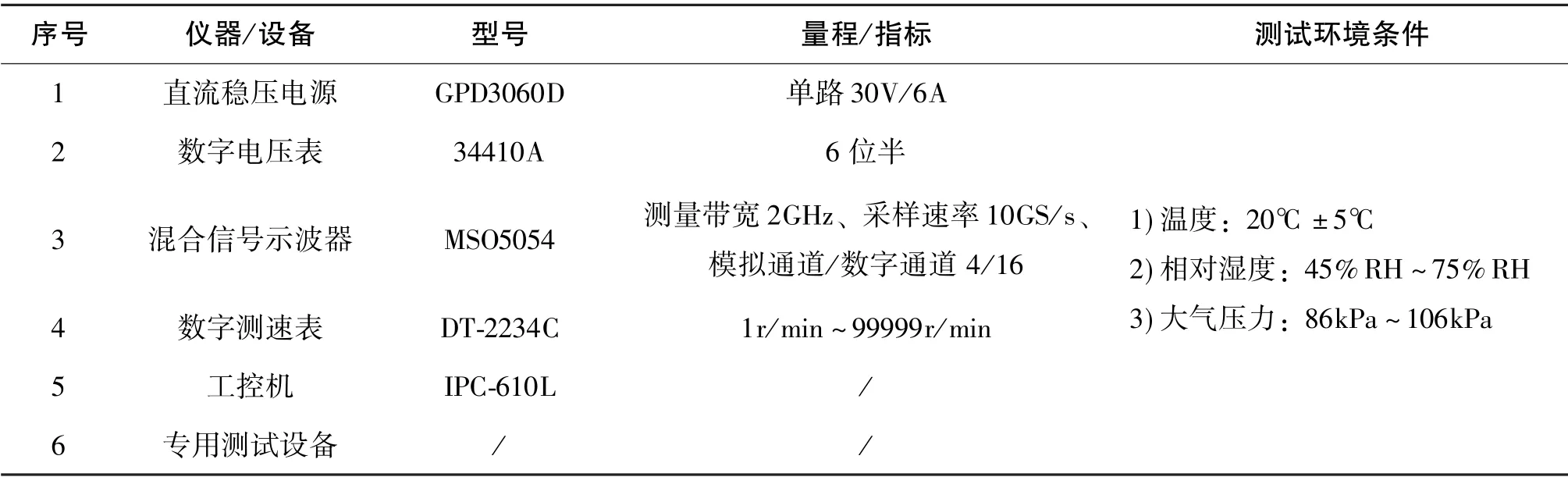
表2 测试系统组成及测试条件Table2 Test system composition and test conditions

图12 系统测试平台示意图Fig.12 Schematic diagram of system test platform
给系统输入±5V指令信号,控制电机正反转,测试时间为1.5个采样周期,电机正反转测试波形如图13(a)所示。由图13(a)可知,系统能可靠实现电机正反转控制。使用示波器对电机电流信号进行监测,电机启动电流为4.9A,稳定工作电流为0.2A,电机电流测试波形如图13(b)所示。同时选取3套产品进行方向控制、空载转速、空载电流、动态响应时间及负载转速等性能测试,产品性能测试数据如表3所示。由表3可知,所有测试结果均满足系统技术指标要求。
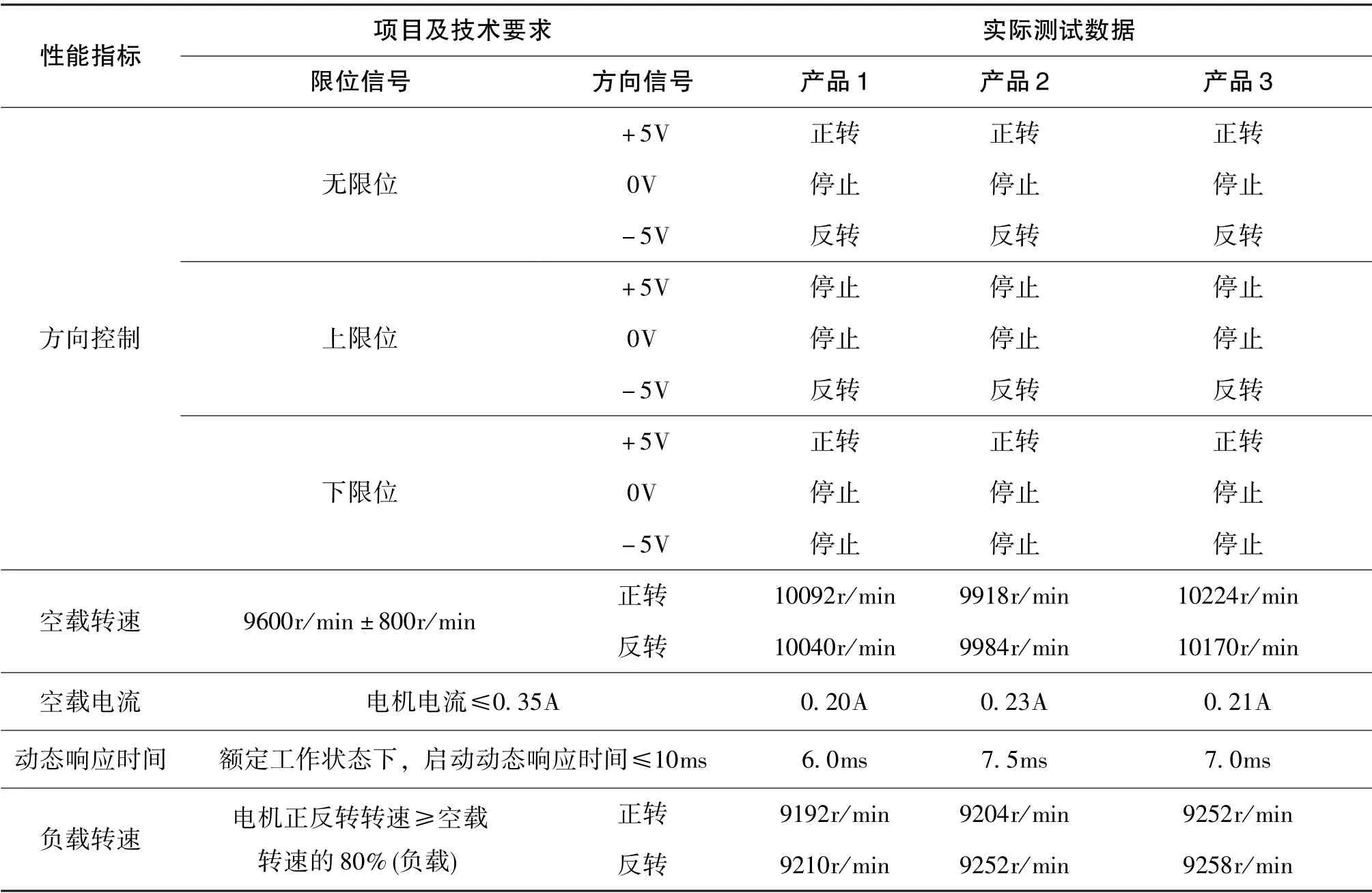
表3 产品性能测试数据Table3 Test data of product performance
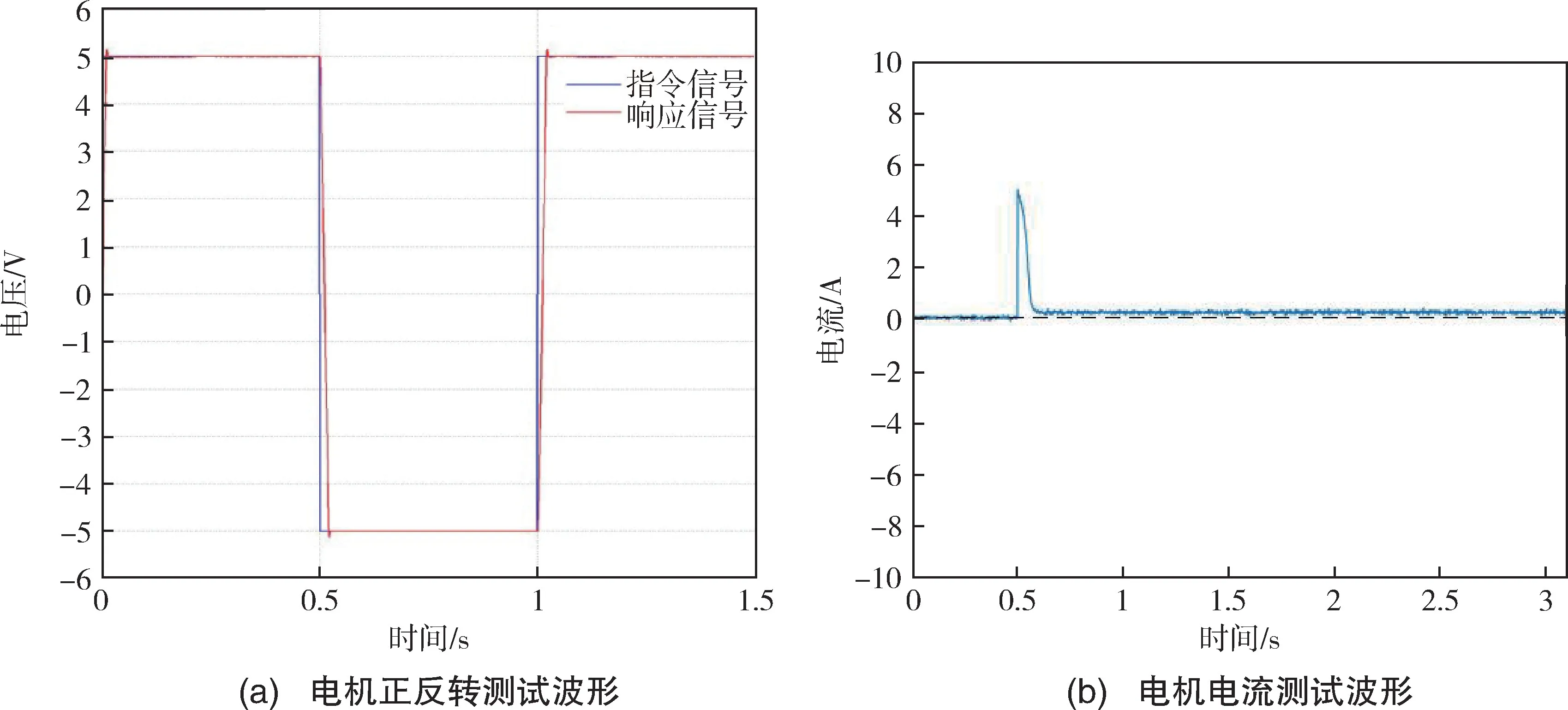
图13 电机测试结果Fig.13 Test results of motor
目前,该系统已成功应用于多个型号舵机产品上,在整机各项环境试验中性能表现优异。
5 结论
本文设计了一种直流无刷电机控制系统,系统以复杂可编程逻辑器件(CPLD)EPM1270T144I5N为控制核心,以软件算法代替硬件电路方式完成了对电机控制信号的解调,并结合电机转子位置传感器的输出,进行逻辑综合运算后,产生PWM调宽波和逻辑控制信号提供给功率放大电路,以控制电机三相电枢正确换相,使电机正常运行。该系统已成功应用于多个型号电动舵机产品中,功能、性能均满足系统使用要求,并且具有功耗小、可靠性高、调试方便等优点,具有较高的工程应用价值。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
汽车维修技师(2019年7期)2020-01-16
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年10期)2019-06-17
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
电机与控制应用(2015年7期)2015-03-01
新高考·高一物理(2014年4期)2014-09-17
河南科技(2014年5期)2014-02-27
黑龙江科学(2011年2期)2011-03-14