基于GPS定位技术的电力巡检目标实时跟踪平台设计
2022-07-28 07:43:34卢朝成康合敏诸葛葳
导航与控制 2022年2期
伍 鹏,卢朝成,颜 真,韩 聪,康合敏,诸葛葳
(国网福建省电力有限公司南平供电公司,南平 353016)
0 引言
我国十分重视电力系统发展,所需要的电力设施遍布全国各地[1]。但是,电力系统在运行过程中会受到气候环境因素影响,出现断股、锈蚀、磨损等问题,给社会和居民带来经济损失[2]。基于此,供电部门十分重视电力设施的安全运行,以此设计电力巡检系统,提前发现电力设备存在的老化、磨损、锈蚀等质量问题,保证电力系统运行安全[3]。然而,电力巡检系统在巡检过程中受磁场、风等因素影响,其跟踪巡检目标时会降低巡检效率、产生较高的巡检成本,且跟踪巡检目标定位存在偏差[4]。为此,电力巡检目标跟踪技术得以发展。
目前,国内外将跟踪技术分为目标侦测、检测区域规划、定位目标、轨迹估计、轨迹预测、目标通告六个阶段,研究出集中式、分布式、以节点为中心、以位置为中心、二进制探测、信息驱动、传送树、双元检测、粒子滤波等目标跟踪算法[5-6]。在国内外研究基础上,相关学者提出如下观点:文献[7]将空中目标作为研究对象,运用YOLOv4算法、KCF算法和深度学习算法,分别对空中目标进行检测、跟踪、分类,实现了空中目标的跟踪。文献[8]将3D多目标跟踪作为研究对象,采用激光技术检测跟踪目标,通过Kalman滤波器预测跟踪目标行动位置,最后运用贪婪算法,根据目标位置跟踪3D多目标。
在实时跟踪电力巡检目标时,上述学者研究的跟踪技术存在跟踪目标轨迹与实际轨迹拟合度低的问题,为此本文提出了基于GPS定位技术的电力巡检目标实时跟踪平台设计。
1 电力巡检目标实时跟踪平台硬件结构设计
依据电力巡检目标跟踪需求,以电力巡检系统为基础,设计了如图1所示的电力巡检目标实时跟踪平台硬件结构。
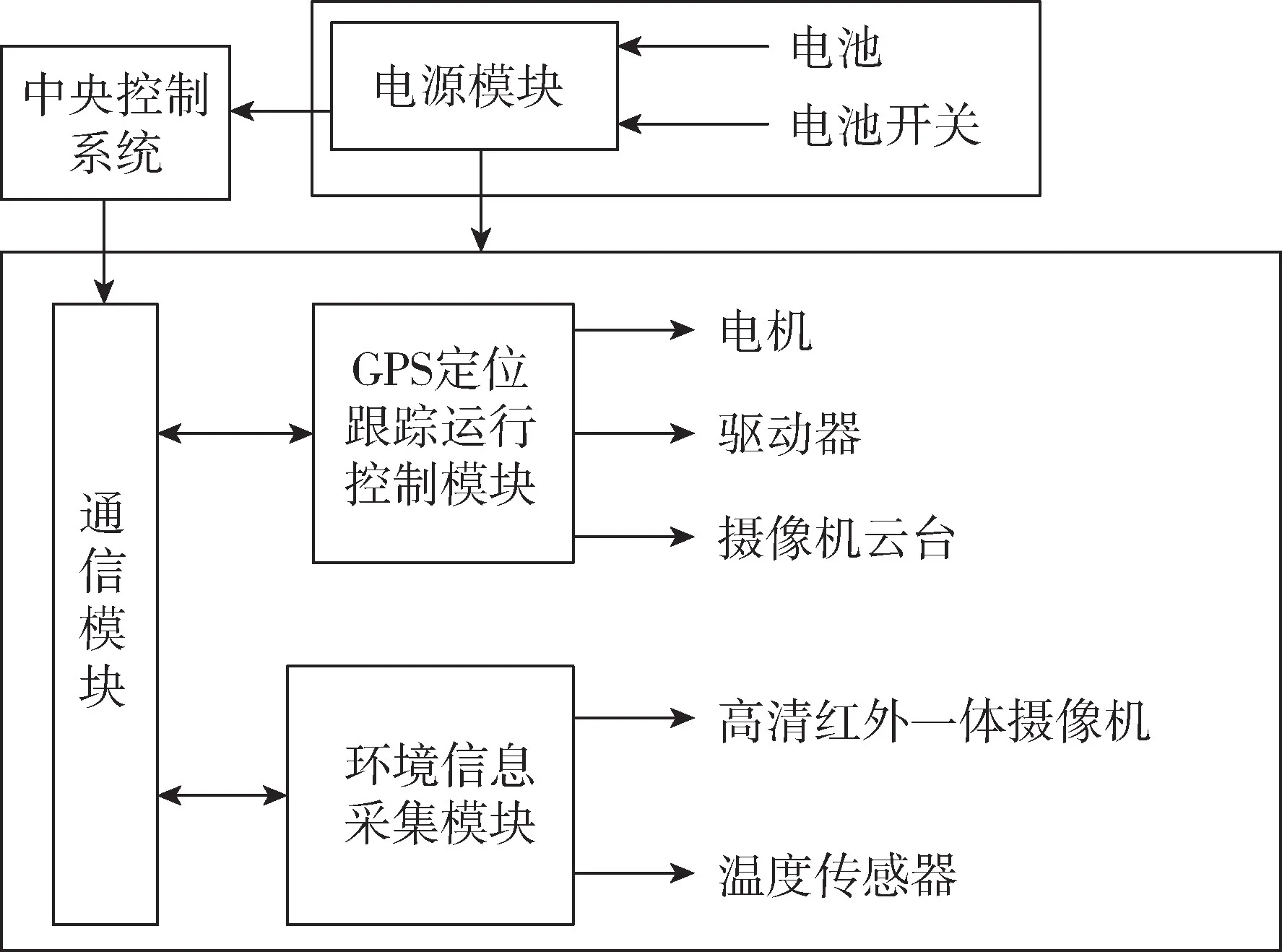
图1 电力巡检目标实时跟踪平台硬件结构Fig.1 Hardware structure of power patrol inspection target real-time tracking platform
如图1所示,电力巡检目标实时跟踪平台硬件结构将平台分为了电力巡检目标GPS定位跟踪运行控制模块、周边环境信息采集模块、电源模块、通信模块和中央控制系统五部分。
中央控制系统主要由服务器、PC、电力巡检管理人员以及其他用户组成,主要功能为设定电力巡检目标和控制其他模块。电力巡检管理人员通过PC端下达电力巡检指令,确定电力巡检目标。服务器会依据这一指令控制通信模块传输中央控制模块信息,实现电力巡检目标跟踪。
根据中央控制系统下发的通信信息,GPS定位跟踪运行控制模块的主要功能为:集中控制基于GPS定位技术的电力巡检设备各运动部件的动作,让电力巡检设备可以根据巡检目标位置进行长时间巡检运动,为实时跟踪平台软件设计提供硬件控制基础。同时,电力巡检设备会将远程控制反馈的信息反馈给中央控制系统。
电源模块主要功能是为平台硬件设备供电、转换、监测电压[9]。考虑到电力巡检设备运行时长、巡检位置等问题,此次设计平台选择电池供电方式为平台各个硬件设备供电。当电池电量不能满足硬件设备运行需求时,电池模块向中央控制系统发出电量过低报警,通知平台操控人员为平台更换电池。
信息采集模块的主要功能为:采用高清红外一体摄像机、温度传感器等感知设备捕捉电力巡检设备及巡检区域环境,为定位电力巡检目标的软件设计提供电力巡检目标跟踪路径的选择依据。
通信模块的主要功能为传送中央控制系统的指令。考虑到电力巡检设备的运行距离,选择4G无线通信方式实现平台通信。
2 基于GPS定位技术的电力巡检目标实时跟踪平台软件设计
跟踪平台软件设计的流程如图2所示。

图2 基于GPS定位技术的电力巡检目标实时跟踪平台软件设计流程Fig.2 Software design process of real-time tracking platform for power patrol inspection target based on GPS positioning technology
2.1 基于GPS定位技术定位电力巡检目标
为了精确定位电力巡检目标,采用GPS定位技术和BD-2定位技术共同确定电力巡检目标位置。基于此,采用此次研究选择的定位技术,所组成的定位模型如图3所示。
由图3可知,受GPS和BD-2定位技术时间基准影响,此次设计的组合定位模型在定位时会产生两个接收时钟差[10]。为此,通过GPS定位技术与BD-2定位技术的单个定位数学方程,得到如图3所示的组合定位模型数学方程,则有
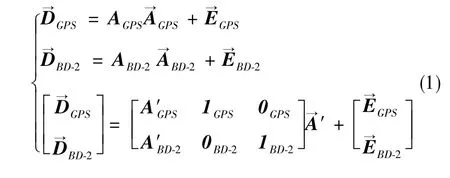
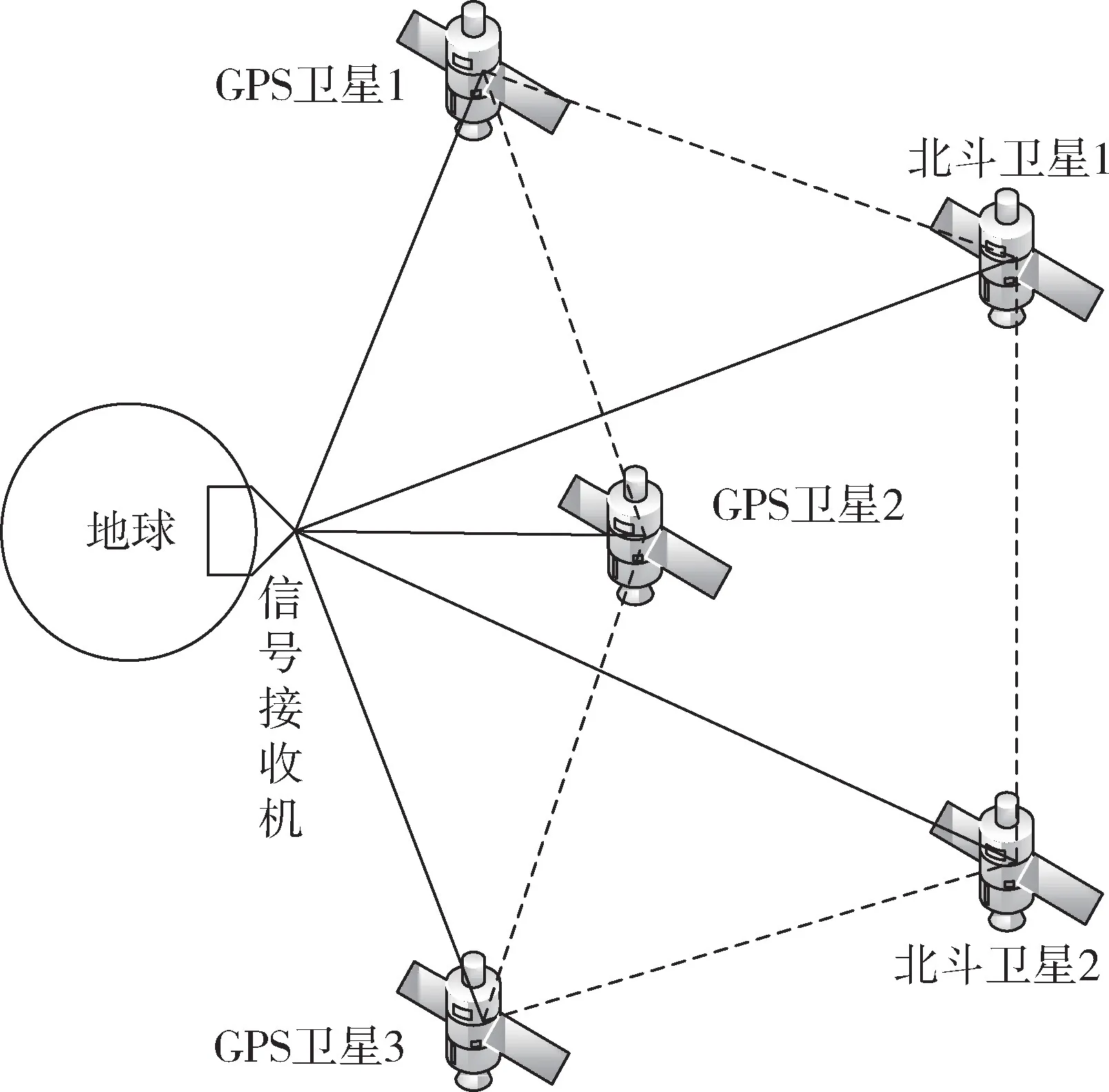
图3 GPS与BD-2组合定位模型Fig.3 Combined localization model of GPS and BD-2
由式(1)可知,GPS定位技术和BD-2定位技术的接收时钟差不相同,为此需要求解信号接收机的钟差。假设信号发射卫星的数量为N,依据信号接收机卫星星历和观测信息写出的伪距方程组为

式(4)中,Δu为接收的增量信号矩阵[13]。忽略观测随机误差,引入最小二乘法,加权融合Δd,得到跟踪目标定位结果Δx,则有

式(5)中,ω为伪距观测量权重比。根据式(5),即可实时获取电力巡检跟踪目标位置。依据图3的GPS与BD-2组合定位模型,设计电力巡检目标实时跟踪算法,实时跟踪电力巡检目标。
2.2 设计电力巡检目标实时跟踪算法
基于GPS与BD-2组合定位模型实时定位到的电力巡检目标,设计的实时跟踪算法如下:
1)初始化定位模型定位到的电力巡检目标,将其记为基样本ε。
2)采用置换矩阵K变换跟踪目标得到负样本,则有

式(6)中,1表示正样本,0表示负样本。依据式(6)所示的置换矩阵,可以让电力巡检目标的基样本ε向下偏移一个元素,形成循环偏移样本

式(7)中,j为基样本中的第j个元素,M为基样本的循环偏移次数[14]。
3)用岭回归计算循环偏移样本,为不同偏移下得到的样本赋权,则有

式(8)中,G为离散Fourier变换矩阵,diag(·)为构造对角矩阵函数,ε′为的共轭运算,⊙表示向量之间的点乘,为ε经离散Fourier变换后的样本,δ为正则化参数,为每个样本回归值组成的列向量。
4)依据式(8)赋予的权值,引入核函数生成回归函数模型f(χ),提取样本位置特征,则有
式(9)中,β为β1、β2、…、βj组成的学习列向量,λ为任意两个样本映射到高维空间的相关矩阵,χ为样本位置特征。
5)采用式(10)训练式(9)所示的回归函数模型

式(10)中,φ为滤波参数,λ1为λ的第一行元素,^y为f(χ)得到的回归值。
6)采用式(9)再次提取样本位置特征,并寻找样本峰值位置变化,以此来更新β和χ的值

式(11)中,χ′为更新后输出的位置,η为学习速率因子,β′为更新后的学习参数[15]。
依据式(11),更新后得到的样本位置值即为目标跟踪结果。重复上述步骤1~步骤6,即可实现电力巡检目标实时跟踪。
3 跟踪实验及分析
将某区域的某一段输电线杆塔作为电力巡检目标,在硬盘为5400转/s、DDR3型4GB内存、1600MHz主频、CPU为Core i5-4200U、独立显卡为ADM Radeon HD8670M的计算机上搭建此次设计的平台,测试此次设计的基于GPS定位技术的电力巡检目标实时跟踪平台的可行性。
3.1 算法收敛性测试
KCF算法使用的HOG特征包含16个bin,大小为3×3。模型学习速率为0.02,最大进化迭代数为500,惯性权重为1.0。正则化参数设置为0.02,高斯核函数设为0.5。针对不同距离下的目标,实验选取了不同的搜索窗口与目标尺寸的边长比值(padding值)进行跟踪实验,确定了能稳定跟踪不同尺寸的最优padding值为2.05。本文算法、文献[8]算法的目标函数训练波动情况如图4所示。
由图4可知,本文方法目标函数在20组时即达到最优padding值。与其他方法相比,本文方法收敛速度更快,说明了本文方法具有较好的收敛性。
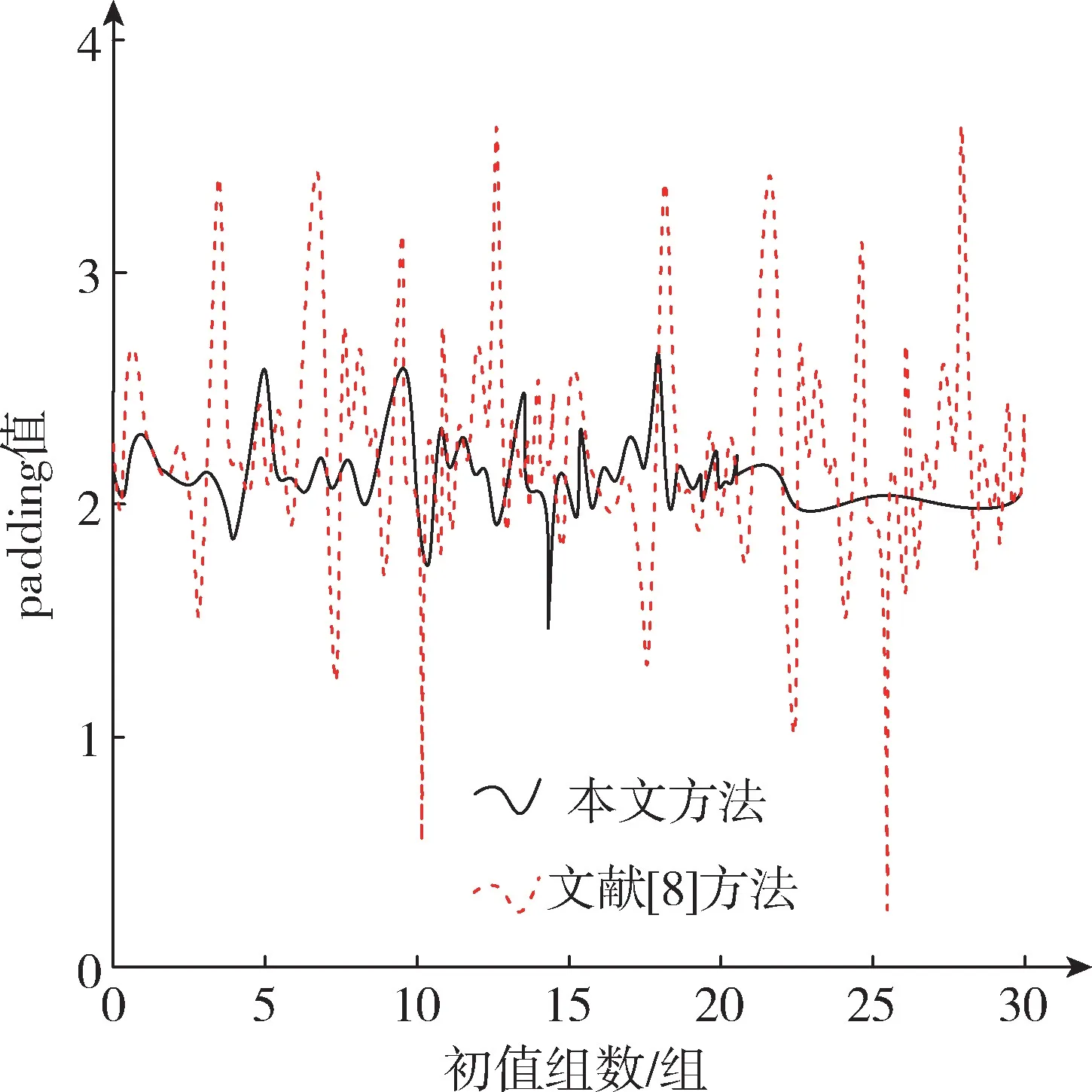
图4 收敛性测试结果Fig.4 Test results of convergence
3.2 电力巡检目标
此次实验选择的输电线路共有16个杆塔,每个杆塔上都有6个陶瓷避雷器、6个导线线夹、2个地线线夹,每个设备上都存在不同大小的螺丝。当避雷器和线夹上的螺丝出现故障时,会出现避雷器和电线线路脱落问题,极易产生电力磁场,遇到明火时出现火灾。
将此次实验选择的输电线路及其杆塔放置在(x,y)二维坐标系中,得到如图5所示的输电线和杆塔位置图。

图5 输电线和杆塔位置图Fig.5 Location diagram of power transmission lines and power tower
3.3 实验方法
根据此次实验确定的实验对象,将图5中的A点设置为无人机巡检起始点,电力巡检无人机的速度设置为16m/s,安装在无人机上的DSP编码器以1s的时间间隔获得GPS定位技术和BD-2定位技术定位组合模型采集的巡检无人机跟踪电力巡检目标轨迹。实验分为跟踪单个目标和跟踪多个目标两部分,其实验过程如下:
1)第一部分:单个目标跟踪。在图5中,设置B点作为跟踪单个目标的位置,B点位置无人机在(x,y)二维坐标系x轴方向上的夹角为63.2°,y轴方向上的夹角为26.8°,C点位置无人机在(x,y)二维坐标系上属于原点,则A点和B点之间的距离为200m。将DSP编码器采集到的目标跟踪轨迹数据分解映射到x轴和y轴方向上,对比轨迹拟合度。
2)第二部分:多个目标跟踪。在电力巡检目标实时跟踪的实际应用中,巡检任务多面对多个目标,多个目标的跟踪效果也体现出跟踪平台的灵活性,因此进行多个目标的跟踪测试。以A点作为杆塔巡检初始位置,使用电力巡检无人机巡检图5中的16个杆塔,在C点处结束杆塔巡检。将DSP编码器采集到的目标跟踪轨迹数据分解到x轴和y轴方向上,对比轨迹拟合度。
为了体现实验结果的客观性,将文献[8]中的目标跟踪方法作为对比方法,检验本文方法和对比方法的目标跟踪效果。
3.4 分析结果
(1)单个目标的跟踪分析
单个目标的跟踪轨迹与其实际轨迹的拟合如图6所示。
由图6可知,此次的设计平台在跟踪单个电力巡检目标时,与文献[8]方法的跟踪轨迹相比,本文跟踪轨迹与实际轨迹的重合程度较高,和实际轨迹误差较小,表明本文方法具有较优的跟踪效果:这是因为本文构建的GPS定位技术和BD-2定位技术定位组合模型能够准确定位每一个电力巡检目标,同时利用KCF算法实现了电力巡检目标的实时跟踪。

图6 单个巡检目标的轨迹拟合Fig.6 Trajectory fitting diagram of single patrol inspection target
(2)多个目标的跟踪分析
多个目标的跟踪轨迹与其实际轨迹的拟合如图7所示。
由图7可知,文献[8]方法应用下,跟踪多个电力巡检目标时,未检查到一些跟踪目标。而与文献[8]方法的跟踪轨迹相比,本文跟踪轨迹与实际轨迹的拟合度明显较高,即在跟踪多个电力巡检目标时,利用GPS定位技术和BD-2定位技术构建的定位组合模型能够准确定位每一个目标,可以同时跟踪多个电力巡检目标,具有较优的跟踪效果。

图7 多个巡检目标的轨迹拟合Fig.7 Trajectory fitting diagram of multiple patrol inspection targets
4 结论
本文的设计从电力巡检设备角度出发,针对电力巡检设备巡检电力目标时可能存在的问题,通过引入GPS定位技术,减少了跟踪目标数量对平台跟踪效果的影响,同时还提高了跟踪轨迹与实际轨迹的拟合度。但是,此次研究未曾考虑电力巡检目标跟踪过程中可能受到的外界干扰问题。因此在今后的工作中,还需深入研究平台跟踪算法的抗干扰能力,进一步提高平台跟踪电力巡检目标的精度。
猜你喜欢
卫星应用(2022年1期)2022-03-09 06:22:30
导航定位与授时(2020年5期)2020-09-23 03:05:00
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
铁道通信信号(2020年9期)2020-02-06 09:16:06
电子制作(2019年11期)2019-07-04 00:34:36
现代装饰(2018年5期)2018-05-26 09:09:39
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
中国三峡(2017年2期)2017-06-09 08:15:29
电测与仪表(2016年23期)2016-04-12 00:23:14