
推举式力量训练机械推杆关节转动摩擦监测
2022-07-27 13:54:16耿彬
机械设计与制造 2022年7期
耿 彬
(郑州大学体育学院,河南 郑州 450044)
1 引言
现阶段,随着人们生活水平的不断提高,人们越发喜欢通过各类兴趣爱好来丰富自身的精神世界,以及通过健身训练来强化身体健康[1]。其中,推举式力量训练机械是锻炼手臂肌肉的高效训练器材,需要采用人力推举发力的方式来完成有效运动,导致推举机械推杆轴承关节处的结构发生摩擦是不可避免的,在不断进行摩擦时会产生误差振动,影响整体关节轴承转动的稳定性以及动态性[2]。所以为保证关节转动轴承与整体推举杠杆保持一定的稳定状态,就需要对其连接处发生的转动摩擦进行实时监测,通过监测机制获取摩擦数据,计算并分析在人力推举训练情况下的摩擦力变化,得到最合适的摩擦力数值,在增强机械推拉力、减轻摩擦负担的同时,还能降低器材损耗延长使用寿命。
为此,众多学者对推举式力量训练机械推杆关节的转动摩擦监测方法进行了研究,例如文献[3]通过非线性分析方法对机械臂关节转动摩擦进行监测,根据运动学原理构建关节位移角计算模型,在考虑转动角位移、角速度和角加速度的情况下,得到机械臂关节转动摩擦监测结果。文献[4]利用三维姿态对机械关节摩擦进行监测,计算四元数向量并将其转换成Euler角。构建关节转动监测坐标系,利用三角函数计算关节位姿,通过迭加获取关节摩擦监测结果。
为了进一步提高关节转动摩擦监测的准确性,提出推举式力量训练机械推杆关节转动摩擦监测方法,采用数学端点坐标模型来实现摩擦信号的实时捕捉,通过精密细化的研究与分析,对推举式力量训练机械推杆关节进行结构数据判定获取分辨率较高的转动振幅信号。运用傅里叶数据变换方法将干扰脉冲信号转换为正常脉冲信号,减少监测误差、提高监测效率。实验结果证明,所提方法下机械输出拉力摩擦力及推力摩擦力的监测结果与设定数据基本保持一致,说明本方法误差率较小、精准度较高,可以有效清除干扰信号,缩短信号监测时间、减少整体耗用,实现合理高效的关节转动摩擦监测方法。
2 机械推杆关节转动结构分析
通过对推举式力量训练机械推杆关节处转动结构进行具体的分析与研究,得出相关结论为后续摩擦监测信号的捕捉和计算提供有效帮助。推举式力量训练机械推杆关节转动结构示意图,如图1所示。
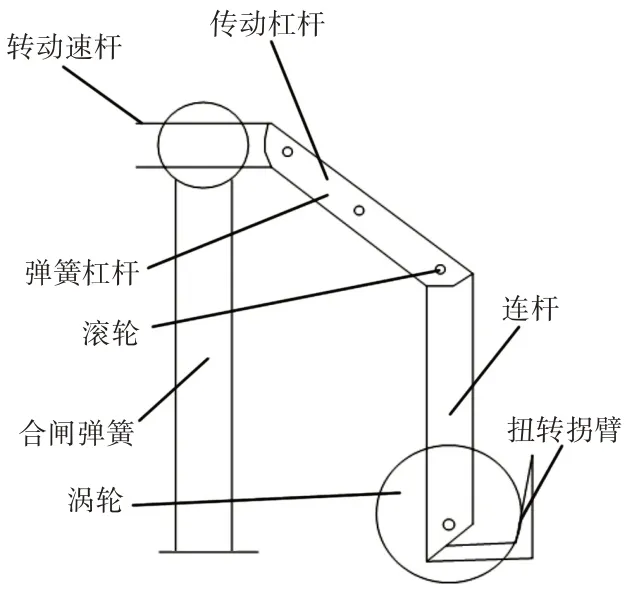
图1 推举式力量训练机械推杆关节转动结构示意图Fig.1 Schematic Diagram of Push Rod Joint Rotation Structure of Push Type Strength Training Machine
由图1可知,对推举式力量训练机械推杆关节处的整体结构零件进行描绘,判定为转动摩擦起到关键作用的零件为转动杠杆、转动连杆、滚轮、轴承以及拐臂转轴。为了能够有效判定在压力推举过程中各杆件运动的状态,需要在相关部件附近安装传感触头,根据传感触头接触到的连接部位分合信号来判定各杆件的开始和结束时刻。在进行摩擦监测时,就可以取消这些传感触头,方便使用。可以看出,在图中连杆部位与拐臂转轴部分是互相配合连接的,此时想要监测到完整的摩擦信号就需要对其进行一定的调整,加强转轴的运动频率,提高监测信号的脉冲数值,便于后续观察与改进。
3 机械推杆关节转动摩擦转动监测
要想实施准确的信号监测就需要构建一种硬件装置来协助完成,此次研究采用的是一种转子轴的数据监测装置,该装置与关节转动出的轴承相连,另一端连接数据终端计数器、管理逻辑分析器、FIFO(First Input First Output数据管理)接口以及数据转换器接口,该接口采用Microsoft微软公司的型号为CPLD XC95288控制器实现。
监测仪器存在四个数据通道,将原始监测信号通过此数据通道进行传输,并且对环境较为复杂情况下的监测信号实现有效时序排列,提取摩擦信号峰值。
3.1 机械转动端点坐标数学模型
通过上述过程对推举式力量训练机械推杆关节转动结构的具体分析,建立机械推杆关节转动端点坐标的数据模型,通过模型矩阵来对摩擦力实现具体描述和表达,帮助后续转动摩擦信号的顺利捕捉。首先,明确机械推杆转动关节与相邻推杆之间作用力方向和位置之间的关系,并利用DH(Denavit Hartenberg)矩阵[5]建模方法进行关节转动的具体描述。机械推杆摩擦力坐标系示意,如图2所示。机械推杆关节摩擦力转动系数与变量,如表1所示。
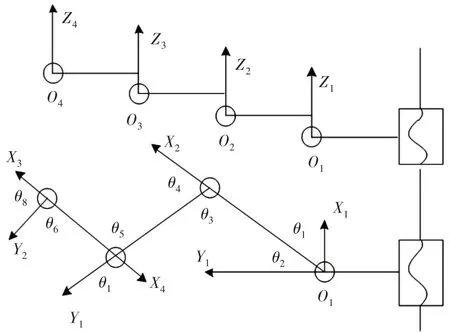
图2 机械推杆摩擦力坐标系Fig.2 Mechanical Push Rod Friction Coordinate System

表1 机械推杆关节摩擦力转动系数与变量Tab.1 Friction Coefficient and Variable of Mechanical Push Rod Joint
通过图3中关节转动摩擦力的运动方向和位置坐标系,结合表1中的实际参数变量,给出相邻推杆坐标系间同等数值的变换矩阵,通过矩阵计算多维空间内的各关节转动角度下的数据,用Ci=cosθi表示竖直方向的摩擦力转动角度,Si=sinθi表示水平方向上的摩擦力转动角度,其中i为常数,且i=1,2,3,竖直方向和水平方向的关节转动坐标数学矩阵如下所示:
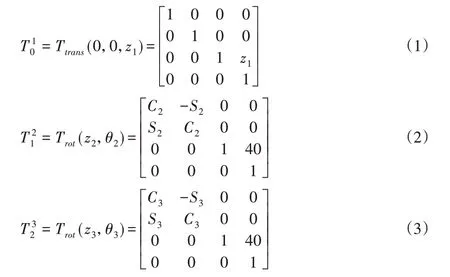

式中:S—推举式力量训练机械推杆的模拟关节数值;C—关节摩擦力的方向变化关系。根据上述数据矩阵(1~4),结合表1中的参数,将图2中处于O4坐标点位置的三维空间向量坐标F1(O1,X1,Y1,Z1),转换成数据测量坐标系F(O,X,Y,Z)关系下的三维空间向量坐标,表达式如下所示:
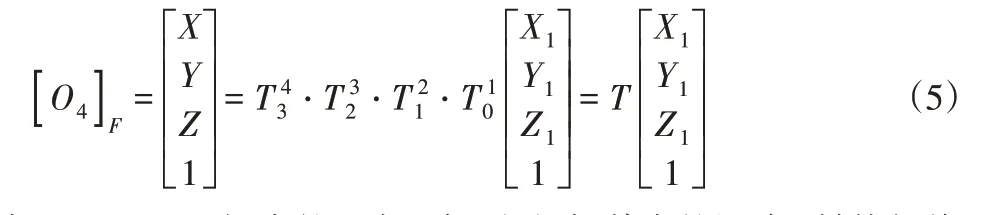
式中:X、Y、Z—空间中的三点坐标系,根据其中的矩阵T转换规律就可完成关节转动摩擦力在空间中的转换。摩擦力坐标系变换示意图,如图3所示。
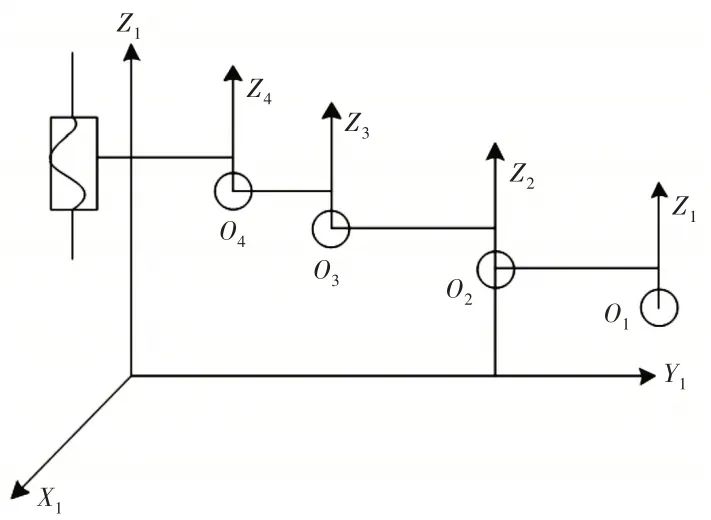
图3 摩擦力坐标系的变换Fig.3 Transformation of Friction Coordinate System
3.2 转动摩擦监测
为保证监测信号的准确性和稳定性,所以需要确保推举式力量训练机械推杆的关节轴承始终处于润滑状态,不会出现摩擦断触的情况从而破坏监测信号。
当关节轴承处于混合和严重断触的摩擦状态情况时,帮助关节转动的油膜[6]就开始出现不稳定情况,导致转动轴与支撑轴之间发生摩擦断触,从而使得轴承内部压力增强,降低转动速度并出现内部裂纹,进而影响摩擦信号的监测与记录,并且还会使器材发生损坏。所以为了提高监测效率,将采取一种线性表达的方式对关节处的轴承摩擦状态实现准确观测,用X(n)表示发生严重断触情况下的轴承摩擦信号,其线性表达为:

由于监测环境中存在数据噪声的影响,所以实际的监测信号与发生故障情况下的干扰信号会出现较大差异,且二者信号频率较弱,所以为了更加突出关节轴承的摩擦脉冲信号,需要对样本信号进行相应的幅值分析,使关于断触摩擦信号的成分转换为幅值信号中的突变部分,这样就可让正常摩擦信号变得更为明显,频率较高易于捕捉和观察,提高信号识别效率。针对上述过程中较为突出的脉冲信号,通过特定的脉冲函数进行计算,分辨干扰信号与正常信号之间的差距。
通常情况下,如果干扰脉冲信号与正常脉冲信号之间拟合函数误差为e(n)≤δ,δ表示较小的初始误差容限,那么此时的脉冲函数[7]就可认定为是一种SS(Sinusoidal Save正弦波[8)]脉冲信号。由于每个固定时间间隔内的脉冲信号监测距离较短,且起止时间较小(约0.1ms左右)监测工作较为困难,需要对应机械关节的转动特点,并通过控制脉冲信号参数的方式解决易产生的时间差异问题,至此,采用傅里叶变换方法将干扰信号转换为正常脉冲信号:

完成干扰信号的转换后,将获得全部信号作为样本信号,进行转动摩擦监测。样本脉冲信号的均差方根公式与能量值为:

根据上述公式可得,经过rmsAE简化并转换后的脉冲信号监测幅值f与信号腰宽[10]Δ有一定关联,幅值f和信号腰宽Δ的拟合精准度较高,其数值的拟合残差仅有10-5。所以将其进行精简后再代入到式(8)的均差方根公式中,就可得出最终的摩擦信号监测计算公式如下:

式中:Ff—推举式力量训练机械推杆关节处的轴承与连杆之间的摩擦力;v—关节主动轴的转速。
根据上述过程并结合实际情况,就可准确计算得出摩擦力的具体数值,且监测速度较快、误差率较小、整体过程较为高效。
4 实验验证
4.1 实验环境
为了保证实验的准确性和可参考性,将以某大学体育馆内的推举式力量训练机械作为此次实验的主要设备,该机械器材的关节轴承为S-184型的连杆轴承,数量为两个分部在关节主轴的中心位置起到支撑转动作用,轴承的下半部分连接的是新型可加载砝码的模拟滚轮轴承,其轴的上下两端分别采用竖直的滚轮轴进行支撑,保证推举动作的连贯性和稳定性。实验所采用的推举式力量训练机械,如图4所示。为了提高实验数据的合理性和真实性,D216型霍尔传感器采集的样本数据作为本次实验的原始数据。该传感器示意图,如图5所示。

图4 推举式力量训练机械Fig.4 Push Type Strength Training Machine

图5 霍尔传感器示意图Fig.5 Schematic Diagram of Hall Sensor
此次所采用霍尔传感器的主要参数,如表2所示。该传感器数据精准度较高监测效率较快是目前可信赖的实验设备之一,将所提方法的监测数据与其进行对比,可得出最真实准确的具体实验效果,在最大程度上保证实验环境真实可靠。推举器械的关节部分主要是依靠人力发力才能进行转动,但由于人力作用力太小、且发力波动大,很难精准监测到关节转动的实际摩擦力,所以需要配合安装一定的机械设备来帮助器械关节进行快速抬举动作,使得摩擦力变化更加明显易于监测。推举器的实验模拟拓扑图,如图6所示。

表2 霍尔传感器主要参数Tab.2 Main Parameters of Hall Sensor
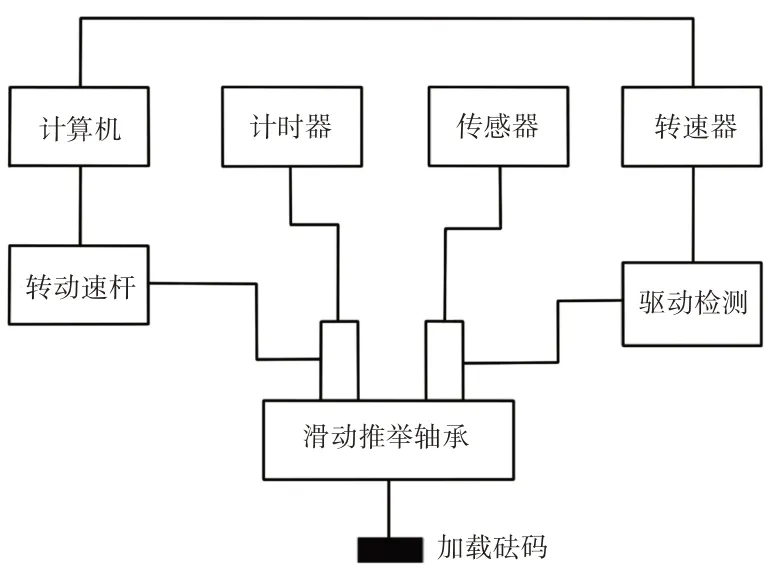
图6 实验模拟拓扑图Fig.6 Experimental Simulation Topology Diagram
4.2 转动摩擦力监测结果
通过详细分析并研究所提方法对推举式力量训练机械推杆关节转动摩擦的监测效果,分别给出机械输出推力摩擦力以及拉力摩擦力的具体监测曲线,并且还加入了该器材的原始数据曲线,使得监测结果更加明显且易于观察。机械输出推力摩擦力的监测结果,如图7所示。拉力摩擦力的监测结果,如图8所示。

图7 机械输出推力摩擦力监测结果Fig.7 Monitoring Results of Mechanical Output Thrust and Friction
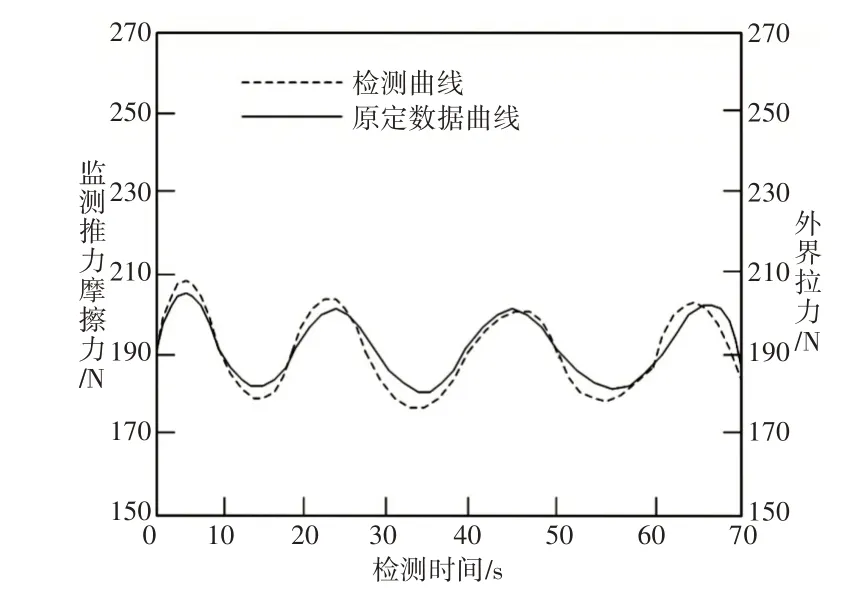
图8 机械输出拉力摩擦力监测结果Fig.8 Monitoring Results of Mechanical Output Tension and Friction
由图7和图8可知,所提方法监测计算机输出的正弦值推力和拉力摩擦监测信号曲线,整体幅度波动不明显且同等间隔内的数值变化较小,没有出现较大的差异性,与原定数据曲线的整体浮动变化基本保持一致,其数值越为接近就表示其监测数据越贴近实际数值,实验效果越佳。
4.3 监测信号滤波处理结果
将所提方法下的摩擦信号监测频率与原始摩擦信号监测频率进行对比分析。原始监测信号振动频率与所提方法滤波处理后监测信号振动频率结果,如图9、图10所示。

图9 原始监测信号振动频率Fig.9 Vibration Frequency of Original Monitoring Signal
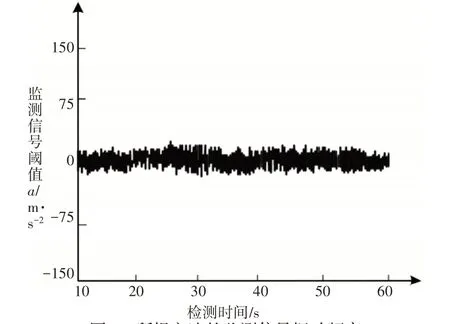
图10 所提方法的监测信号振动频率Fig.10 Monitoring Signal Vibration Frequency of the Proposed Method
从图9中可以看出,原始信号的监测频率曲线一直处于高频率的浮动状态,信号阈值间的幅值相差较大且变化不稳定,在(10~60)的监测时间内出现严重的振幅扰乱现象,监测信号发生大幅度的波动,这说明在这个时间段内出现了异常因素的影响,导致监测数据出现误差,进而发生躁动。
图10所示的实验结果表明,所提方法下的摩擦监测信号幅值变化平稳,各时间段内的信号频率变化不大且幅度较小,这说明整个监测过程的信号传输与发送都是较为稳定的,没有出现外界因素的影响,使得振幅信号正常分散,误差较小准确性较高。这主要是因为所提方法在对信号进行捕捉提取时,运用傅里叶变换方法将干扰信号转换为正常信号,有效减少信号的波频误差、增强捕捉的精准度,增强整体效率。
5 结论
为了实现关节转动摩擦的有效监测,通过对推举式理想训练机械推杆关节部分的结构进行具体分析,得出需要在相关部件附近安装传感触头,来判定各杆件的开始和结束时刻,辅助摩擦信号的具体监测。建立机械关节端点的数学计算模型,分别计算转动轴承端点在空间内的三点向量坐标,采用傅里叶变换完成干扰信号的转换,提高信号的完整性,以减少后续的监测误差。实验结果显示,该方法的信号监测效果较好、稳定性较强,整体工作效率较为优异,可以实现有效地摩擦监测。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
数学物理学报(2022年3期)2022-05-25 13:33:28
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:12
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:08
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:04
中学生数理化·八年级物理人教版(2021年3期)2021-07-22 03:19:00
中学生数理化·中考版(2019年10期)2019-11-25 09:39:06
中学生数理化·八年级物理人教版(2019年3期)2019-04-25 06:20:52
中成药(2017年12期)2018-01-19 02:06:54
中学生数理化·中考版(2017年10期)2017-04-23 06:29:40
