基于旋量理论的混联拟人机械腿的运动学分析①
2022-07-26 06:05李研彪王泽胜
高技术通讯 2022年5期
李研彪 陈 科 孙 鹏 王泽胜
(浙江工业大学机械学院 杭州 310032)
0 引言
拟人机器人一直以来是机器人领域研究的热点。机械腿在保持机器人身体运动平衡当中起到了至关重要的作用,其结构直接决定了机器人的运动学和动力学特征[1]。目前,各国已相继研制出了不同类型的拟人机器人,如日本国家先进工业科学技术研究院的HRP-5P[2]、韩国科技先进研究院的HUBO[3]和国内清华大学的THBIP-II[4]。这些机器人腿部的各关节均采用多个由直流电机经谐波减速带动的转动副串联而成,而串联机构存在运动惯量大、累计误差大等不足[5]。较少的拟人机械腿采用并联机构,如日本早稻田大学的WL-16RIV[6]和意大利卡西诺大学的LARMbot[7],虽然有效弥补了串联机构的缺点,但是其体积庞大,结构非拟人化,运动步长明显小于人的步长。为使串联机构与并联机构优势互补,研究人员开始研究混联式机械腿,如SAFFiR 机器人[8]、THOR 机器人[9]和7 自由度混联机械腿[10],其研究成果表明,混联机械腿更能模拟人体腿部肌肉驱动方式,从而进行稳步行走。
机器人的运动学分析是机器人机构设计和控制的重要组成部分。大多数研究者采用Denavit-Hartenberg(DH)参数描述法建立不同机器人的运动学方程。然而,DH 参数法需要对每个连杆建立局部坐标系,通过坐标转换来建立运动学方程,建模过程十分繁琐。旋量理论是一种高效的数学工具,它以简洁的数学符号和明确的物理几何意义被广泛应用到机构学的研究领域。文献[11]提出了基于旋量理论与Paden-Kahan 子问题求解混联机构位置反解的广义方法。文献[12]利用以李群、李代数为基础的旋量理论简化了并联机构运动学和动力学的求解过程。文献[13]基于旋量理论系统性地探讨了并联机构的输入端和输出端的运动/力传递特性,并定义了一系列评价指标。
由于并联机构具有强耦合性,其正运动学的求解是机构学研究中的难点之一,很多学者对此进行过深入的研究[14-16],而混联机械腿中又包含多个并联机构,这使得对混联机械腿的运动学分析更加艰巨。法国圣昆廷凡尔赛大学研制的ROBIAN[17],其腿部的髋关节与踝关节采用相同构型的并联机构,用末端运动分解的几何算法来求解正运动学。国内哈尔滨工程大学研制的HEUBR_1[18],其踝关节为2PSS-U(P 为移动副,prismatic pair;U 为虎克铰,Hooke pair;S 为球铰副,spherical pair)并联机构,采用神经网络的多层前向传播网络来拟合正运动学的非线性函数。哈尔滨工业大学研制的液压驱动6 自由度机械腿[19],通过线性化处理来简化2SPS-U 并联踝关节的运动学分析。虽然不同的混联机械腿可根据相应的算法进行运动学分析,但计算复杂,不易寻找可靠的算法,很难对机械腿进行精确的实时控制。运动解耦的并联机构能有效地改善这一问题[20],但有关解耦并联机构在拟人机械腿上的应用鲜有报道。
本文提出一种新型串并混联拟人机械腿构型,采用Paden-Kahan 子问题法结合空间几何法求解机械腿机构的位置反解;由于机械腿的髋关节机构与踝关节机构为含恰约束支链的解耦并联机构,根据解耦机构特性推导混联机械腿的位置正解表达式;利用李代数se(3)的双线性对称形式(Klein 型),计算混联机构末端点的速度和加速度,并通过仿真验证机械腿运动学模型的正确性,为该机构的控制提供理论基础。
1 拟人机械腿的方案设计
1.1 拟人机械腿的构型分析
1.1.1 人体腿部运动解剖分析
人体腿部关节包括髋关节、膝关节和踝关节,其中髋关节具有3 个球面转动自由度,绕冠状轴的弯曲和伸展、绕矢状轴的内收和外展以及绕垂直轴的外旋和内旋;膝关节具有单自由度转动;踝关节具有2 个球面转动自由度,包括背伸、跖屈运动和外翻、内翻运动[21]。
从运动形式上看,髋关节中的2 个自由度方向的运动与踝关节具有相似性,因此在结构上采用球面2 自由度并联机构实现踝关节运动以及髋关节的2 个自由度方向的运动,而髋关节剩余的1 个自由度可与单自由度膝关节组成串联机构。此外,机械腿需要有一定的灵活性以及较强的承载性。相对于旋转电机,直线推杆具有较大的驱动力和承载力,并且可将直线推杆安装在固定件上,与人体腿部关节不必承载具有驱动作用的肌肉的重量相似,机械腿也不必承受驱动装置的重量,降低了运动惯量。
1.1.2 并联机构的构型设计
传统的并联机构具有高耦合性,使得机构的运动分析复杂化。因此,本文设计了PRC-PRCR-RR(R 为旋转副,rotating pair;C 为圆柱副,cylinder pair)部分解耦型球面2 自由度并联机构,由静平台、动平台和3 条运动支链构成,其机构简图如图1所示,三维模型图如图2 所示。运动链1 由移动杆AB、连杆BC和动平台通过圆柱副连接而成。运动链2 由移动杆FG、连杆GH、HI和动平台通过转动副连接而成。运动链3 由连杆DE和动平台通过转动副连接而成,并且轴线OD与轴线OE始终正交。
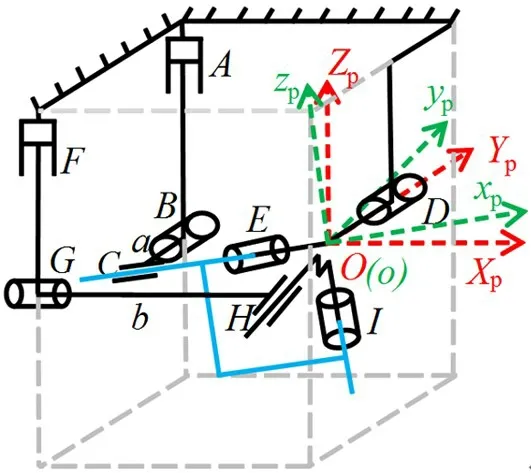
图1 PRC-PRCR-RR 并联机构简图
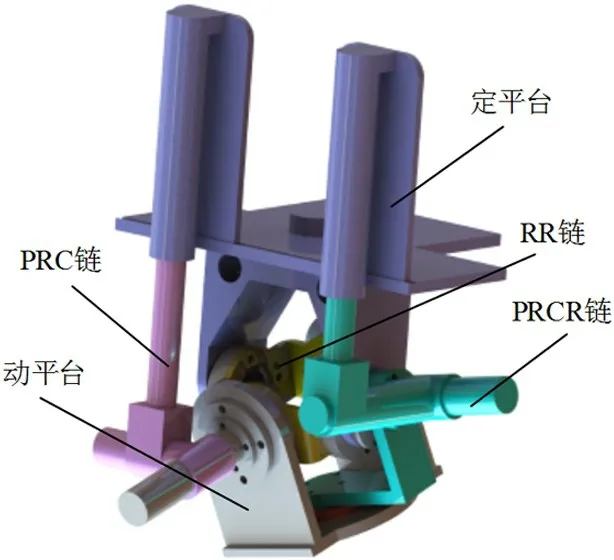
图2 PRC-PRCR-RR 并联机构模型图
静坐标系为OXPYPZP,其原点与旋转中心点O重合,ZP轴垂直于静平台,方向向上,YP轴始终与轴线OD重合,XP轴由右手螺旋定则确定。动坐标系为oxPyPzP,其原点与旋转中心点O重合,zP轴始终与轴线OI重合,方向向上,xP轴始终与轴OE重合,方向由E指向O,yP轴由右手螺旋定则确定。
推杆AB与推杆FG垂直于静平台以及连杆BC、GH,并且2 个推杆形成的面始终平行于面OYPZP;连杆BC垂直于连杆GH;初始姿态下,动坐标系与静坐标系重合,连杆BC、GH、DE处于同一水平面内。其中,连杆BC的长度为a,连杆GH的长度为b,圆柱副C到原点O的距离为c,圆柱副H到原点O的距离为d。
1.2 拟人机械腿的结构布局
拟人机械腿的三维模型如图3 所示,包括髋关节机构、膝关节机构以及踝关节机构3 个部分。其中,髋关节机构为PRC-PRCR-RR 并联机构;膝关节机构为两自由度转动机构,由1 个电机与转动导杆机构构成;踝关节机构也采用PRC-PRCR-RR 并联机构。将各关节机构依次串联构成一种新型混联拟人机械腿。
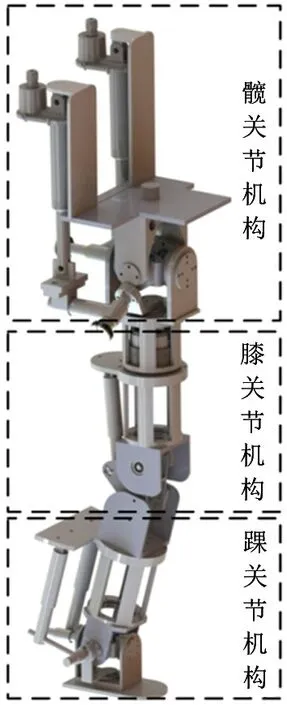
图3 混联机械腿机构模型图
拟人机械腿的机构简图如图4 所示,静坐标系为OXYZ,其原点与髋关节机构的旋转中心点O重合,Z轴垂直于髋关节机构静平台,方向向上,Y轴始终与轴线ODH重合,X轴由右手螺旋定则确定。动坐标系为oxyz,其原点与踝关节机构的旋转中心点o重合,x轴始终与轴线重合,y轴始终与轴线oDA重合,y轴由右手螺旋定则确定。初始姿态下,静坐标系与动坐标系姿态一致,OZ轴与oN轴呈15°。
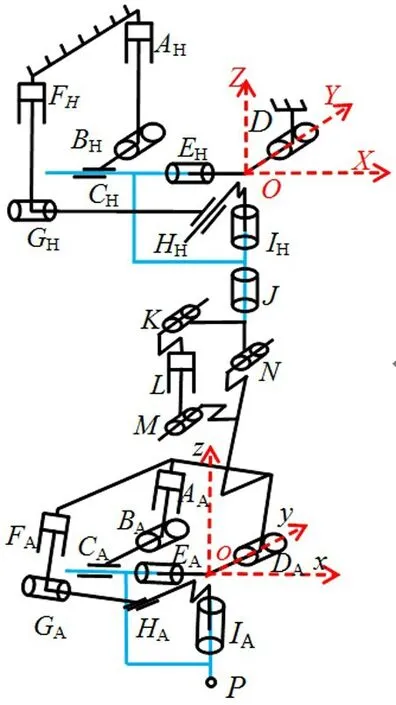
图4 混联机械腿机构简图
2 拟人机械腿的位置反解
保持机构自由度的数量和性质不变,将混联机械腿转换为串联机械腿。通过指数积公式建立等效串联机械腿的正运动学模型,根据目标位姿矩阵利用Paden-Kahan 子问题法求解等效串联机械腿的位置反解。将获得的等效串联关节理论值作为并联机构动平台的输出位姿,进而求解并联机构各关节的位置反解。
2.1 等效串联机械腿的位置反解
根据机械腿的构型设计,转换后的串联机构如图5 所示,各关节机构均等价为2 自由度串联机构。因此,整个混联机械腿等效为6 自由度串联机构。
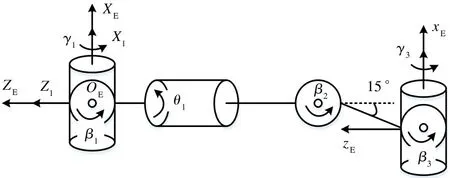
图5 混联机械腿等效串联机构图
基于旋量理论与指数积公式[22],建立等效串联机械腿的正运动学模型。
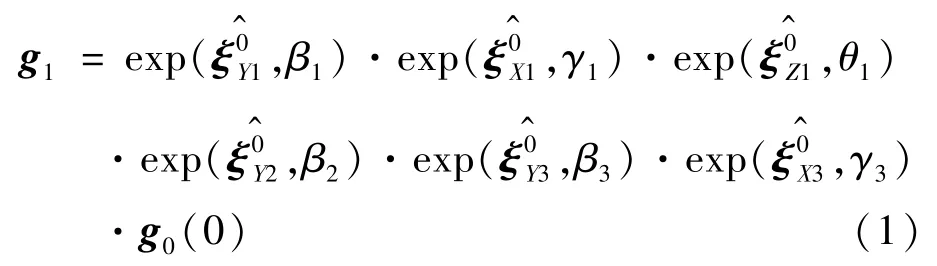
由于机构存在冗余自由度,末端位置的位置反解存在无数解,需给定1 个输入参数值,才可求出各个关节输入值的唯一解,现假设θ1为给定值。
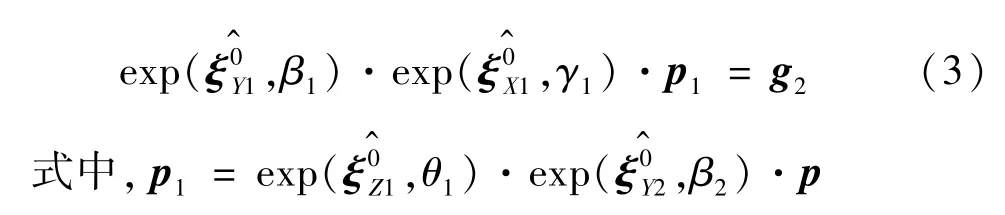
2.1.1 求解β2
踝关节机构转动中心点o的齐次坐标为p,将式两边同右乘g0(0)-1·p:

髋关节机构转动中心点O的齐次坐标为q1,将式两边同减q1,并取两边的二阶范数,再根据Paden-Kahan 子问题3,可得β2。
2.1.2 求解β1、γ1
将式(2)变换可得:
根据Paden-Kahan 子问题2 求解式,得β1、γ1。
2.1.3 求解β3、γ3
将式(1)变换可得:
设轴xE和yE外的1 个参考点的齐次坐标为p3,将式(4)两边同右乘p3,再根据Paden-Kahan 子问题2,可得β3、γ3。
至此等效串联机械腿的6 个关节角度全部求解出来,即获得髋关节机构动平台的输出角度、膝关节机构的输出角度以及踝关节机构动平台的输出角度。
2.2 并联关节机构的位置反解
PRC-PRCR-RR 并联机构为含恰约束支链的部分解耦型2 自由度转动并联机构[23],当运动链1 驱使动平台绕轴yP旋转时,动平台不绕轴xP旋转并且转动的角度与绕轴xP转动的角度无关。因此,可先对运动链1 进行单独分析。
2.2.1 求解Δl1
设并联机构转动中心O的齐次坐标为p4,并按照2.1.1 的方式变换运动链1 的正运动学模型

式(5)为PRP 链的正运动学模型,其几何意义为将圆柱副C轴线OC上的一点p4沿着轴线OC移动rC1距离,然后绕着旋转副B轴线BC旋转θB角度,再沿着移动副A轴线AB方向移动rA距离。如图6 所示,S1表示轴AB,S2表示轴BC,S3表示轴OC,点p4为最初的点,点p7为最终的点;由几何关系可得点p4始终在垂直于轴S2的平面内运动,并且p4到p7的路径有无数条,说明此构型的PRP 链具有冗余自由度,无法仅采用Paden-Kahan 子问题法求解位置反解。因此,本文采用空间几何法与Paden-Kahan 子问题法相结合求解位置反解。
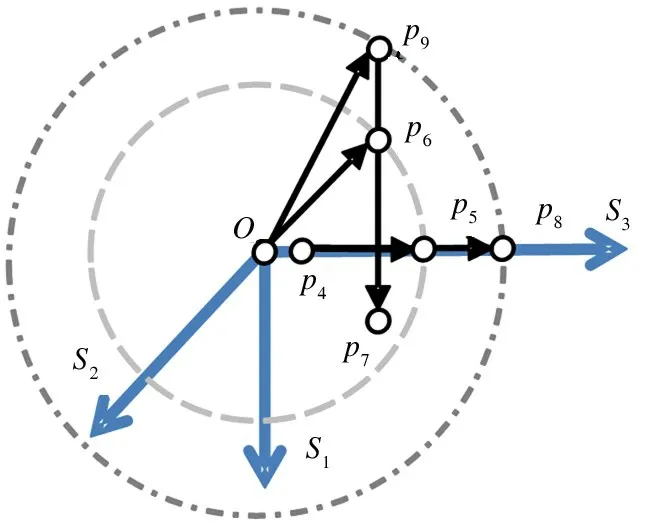
图6 PRP 子问题几何图
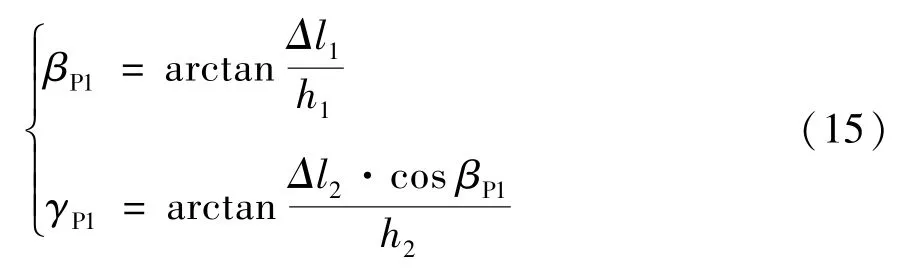
由于运动链1 始终驱使动平台绕着轴YP旋转,因此其运动特性等效为空间单自由度机构,如图7所示,该链驱使动平台在OXPZP平面内绕着O点做旋转运动,根据机构各杆之间的几何关系,可得:
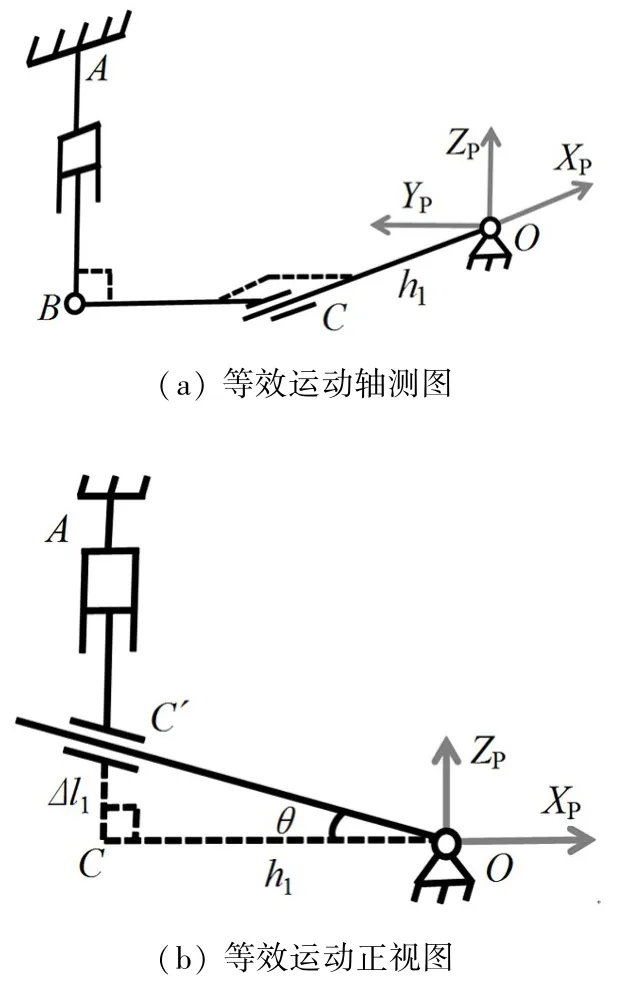
图7 PRC 链等效运动图
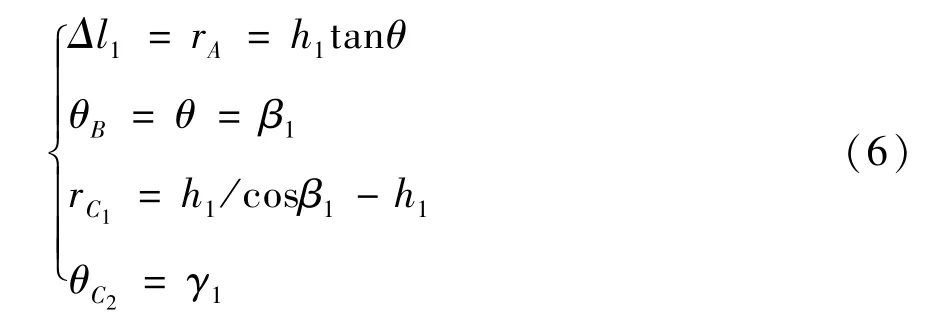
式中,Δl1为移动杆移动的距离;h1为连杆BC到轴ZP的垂直距离,θ为杆OC绕O点旋转的角度。
2.2.2 求解Δl2
将运动链2 正运动学模型变换为

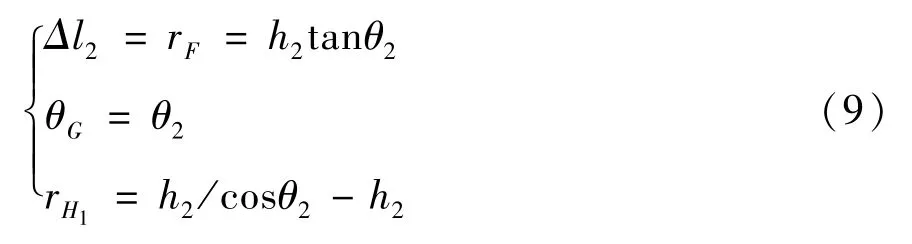
式(7)与式(5)是一致的,说明运动链2 也无法仅应用Paden-Kahan 法求解,需要结合机构自身的特性求解位置反解。运动链2 中的PRC 链驱使动平台在OYPZP平面内绕着原点旋转,即始终绕着轴XP旋转。对运动链2 进行等效替换,在原点处构建轴线指向轴XP的虚拟旋转副J,移除PRC 链中的移动副F、转动副G以及圆柱副H中的移动副H1,其余的运动副(圆柱副H中的转动副H2和转动副I)与虚拟旋转副J组成新的虚拟运动链RRR,如图8所示。此构型的虚拟运动链RRR 驱使动平台的运动特性与运动链PRCR 一致。
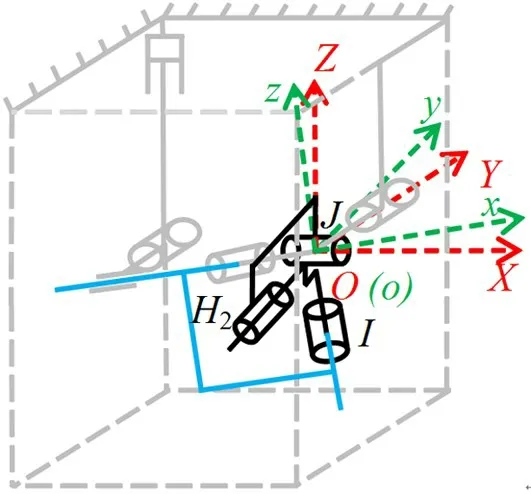
图8 虚拟运动链RRR 机构图
虚拟运动链RRR 的正运动学模型为
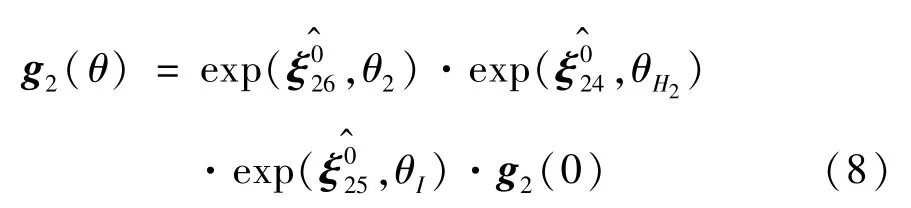
设OI轴上不在原点O处的1 个参考点的齐次坐标为p5,将式两边同右乘g2(0)-1·p5,变换成Paden-Kahan 子问题2 形式,由此求解出θ2、θH2,再将式(8)转变成Paden-Kahan 子问题1 形式,即可求解θI。
其中θ2是第2 条PRCR 链中的PRP 运动副驱使动平台在OYPZP平面绕O点旋转的角度,其位置反解的求解方法于运动链1 一致,故运动链2 中其余运动副反解为
将获得的髋关节机构动平台输出角度和踝关节机构动平台输出角度代入式(5)~式(9),即得髋关节机构与踝关节机构的位置反解。
2.3 膝关节机构的位置反解
膝关节机构为2 自由度转动机构,其转动导杆机构如图9 所示。已知AB为定长杆,长度为l1,BC为摇杆,长度为r,θ为初始角度。根据各杆件之间的几何关系,可得:

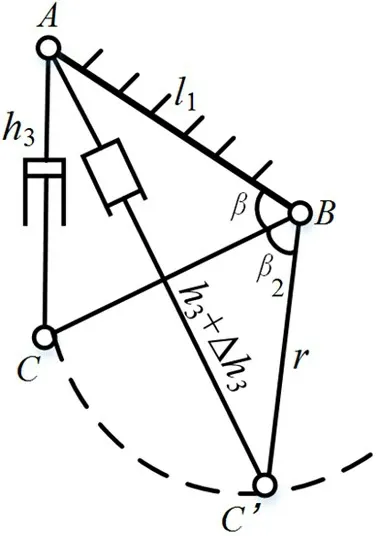
图9 膝关节机构简图
由于膝关节的正反解是容易求解的,但运算相对复杂,因此在以下分析中,将移除移动副,仅将转动副B作为主动副。
至此混联机械腿的6 个主动关节的输入值全部求解出来,实现了混联机械腿的位置逆解算法。
3 拟人机械腿的位置正解
由于PRC-PRCR-RR 并联机构中的第3 条RR链为恰约束支链,故采用欧拉角(z-y-x)描述动平台的位姿。设动平台绕动坐标系yP轴、xP轴旋转角度分别为βP1、γP1,其姿态矩阵为
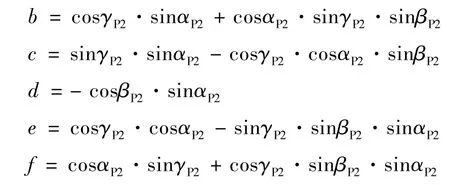
对于虚拟运动链RRR,可采用欧拉角(x-y-z)描述动平台的位姿。设动平台绕动坐标系xP轴、yP轴、zP轴旋转角度分别为γP2、βP2、αP2,其姿态矩阵为
式中,a=cosβP2·cosαP2
2 条运动链对动平台的姿态变化一致,因此有R1=R2。分别取R1和R2第2 行第1 列的数:

分别对两姿态矩阵第1 行第1 列的数与第1 行第2 列的数做比值:

联合式(6)、式(9)、式(13)、式(14),有:
由此也可得,该并联机构为部分解耦。
髋关节机构与踝关节机构的输入位移已知时,将其代入式(15),可得相应动平台的输出位姿,再根据式(1),即可得混联机械腿的位置正解。由于解耦并联机构的特点,该机械腿无需特殊的算法即可求解位置正解。
4 拟人机械腿的速度和加速度分析
4.1 并联机构的速度和加速度分析
通过旋量理论可求得串联机构速度雅克比矩阵,具体理论推导参考文献[22]。
对于并联机构中的少自由度运动链,可构建几个与原运动副线性无关的虚拟运动副,使之成为6自由度链,并设此虚拟运动副对应的角速度为0。设为PRC-PRCR-RR 并联机构第1 条运动链中虚拟运动副的瞬时运动旋量,为第2 条运动链中虚拟运动副的瞬时运动旋量,则这2 条链的速度方程为
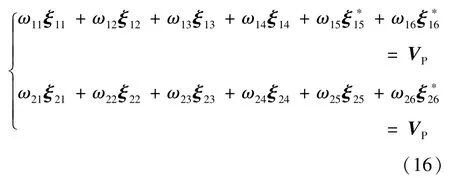
式中,ξij为第i条链中第j个运动副的瞬时运动旋量;VP为并联机构末端杆上与空间坐标系原点重合的点的速度;ωij为第i条链中第j个运动副的相对速度,其中ω15、ω16、ω26始终为0。
对于恰约束运动支链3

式中,ω31、ω32为并联机构2 自由度关节的相对速度,即动平台欧拉角(z-y-x)的旋转角速度,其中z轴不旋转。
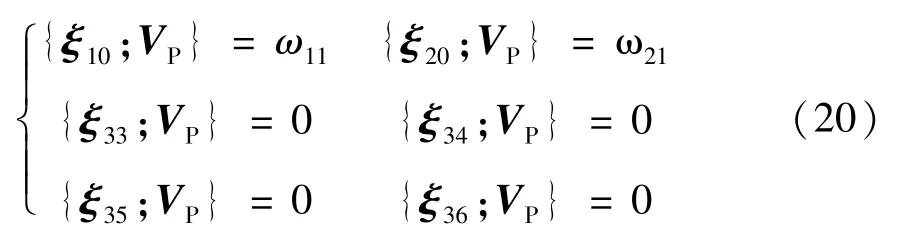
设旋量ξi0与对应支链中被动运动副旋量的互易积为0,而与对应支链中主动运动副旋量的互易积为1,即

通过求解线性方程组式(18),可求得旋量ξ10、ξ20。
设旋量ξ3k(k=3,4,5,6)与第3 条RR 链的所有运动副旋量的互易积为0,即

通过求解线性方程组式(19),可求得旋量ξ3k(k=3,4,5,6)。
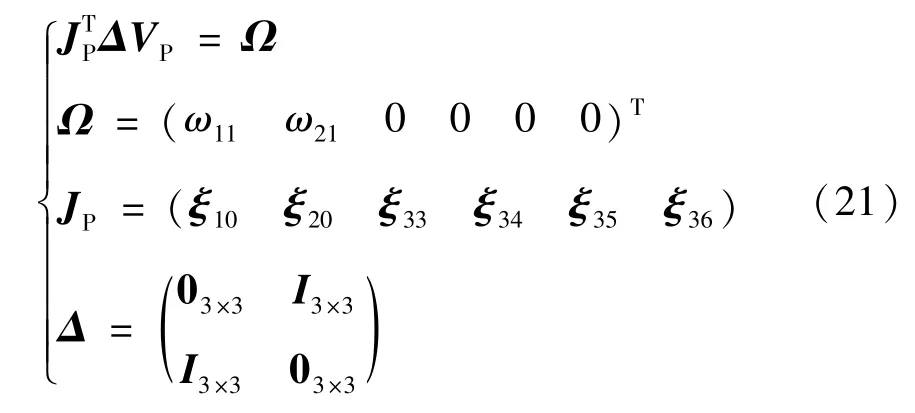
根据李代数se(3)的双线性对称形式(Klein型)公式,可得并联机构的6 个速度辅助方程为
将式(20)根据需要组合成矩阵形式,得到该并联机构的输入速度与参考坐标系原点重合点的6 维速度量之间的映射。
根据多刚体系统旋量加速度合成法则[24]:
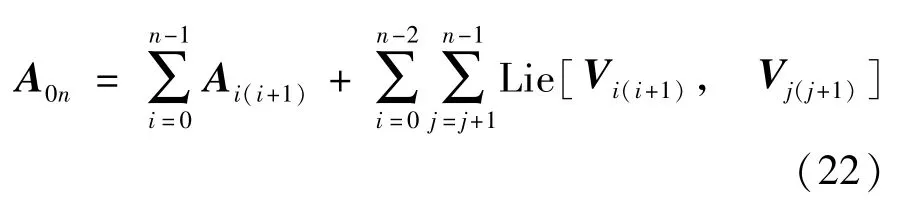
式中的第2 项表示一条串行链上第n关节的瞬时运动旋量导数,Lie[]为李括号运算,其运算结果为6维矢量。
应用本节求速度的方法,可得到该并联机构的输入加速度与参考坐标系原点重合点的6 维加速度量之间的映射。
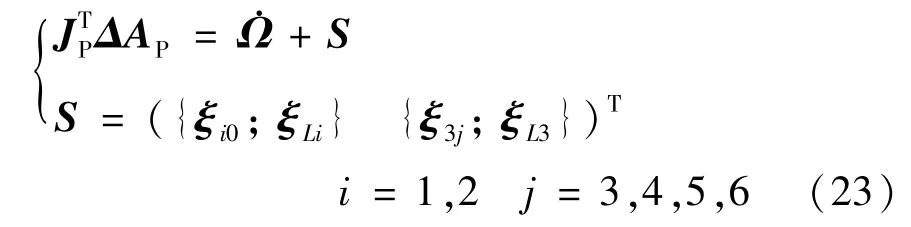
式中,S为6 维矢量,ξLk(k=1,2,3)为对应支链末关节的瞬时运动旋量导数。
4.2 拟人机械腿的速度分析
髋关节机构与踝关节机构的速度映射为
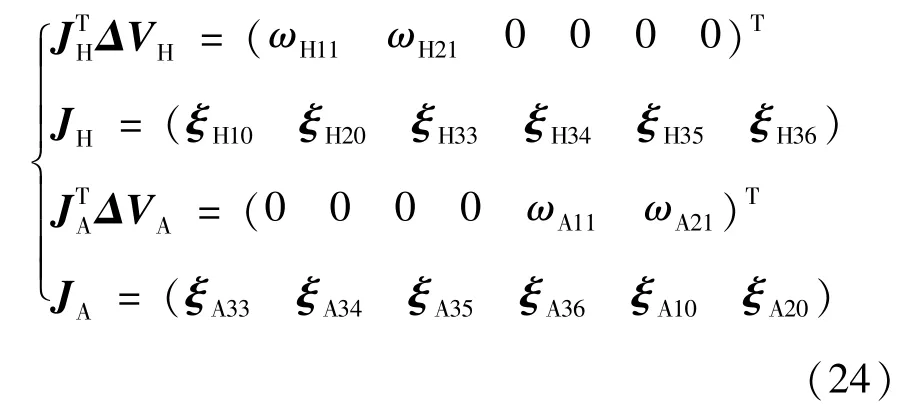
式中,VH为髋关节机构中动平台上与原点重合点的速度,VA为踝关节机构中动平台上与原点重合点的速度,ωH11、ωH21、ωA11、ωA21为各关节机构的输入速度。
混联机械腿的速度方程为
式中,ΩHY为各等效串联关节的角速度;VHY为机械腿末端杆上与原点重合点的速度。
联合式(24),得:
由此可得混联机械腿输入速度与参考坐标系原点重合点的6 维速度量之间的映射。
机械腿末端参考点的角速度就是VHY的原部,其线速度可表示为

式中,Vi为机械腿末端参考点线速度,v(VHY)为VHY的对偶部,ω(VHY)为VHY的原部,ri为坐标原点到末端参考点位置的坐标矢量。
4.3 拟人机械腿的加速度分析
髋关节机构与踝关节机构的加速度映射为
混联机械腿的加速度方程为
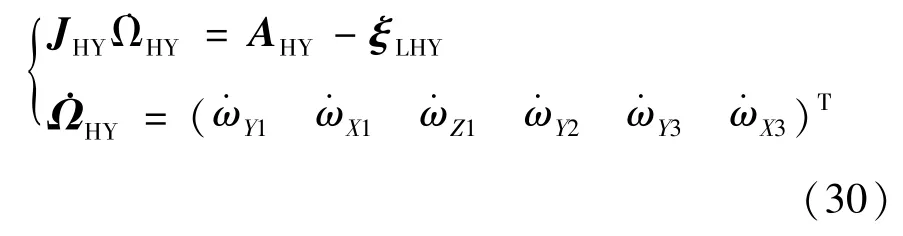
式中,AHY为混联机械腿末端杆件与坐标系原点重合点的6 维加速度量;ξLHY为机械腿等效串联机构的瞬时运动旋量导数。
当AHY已知且JHY非奇异时,可得各等效关节的加速度为

联合式(27)、式(29)、式(31),可得混联机械腿输入加速度与参考坐标系原点重合点的6 维加速度量之间的映射。
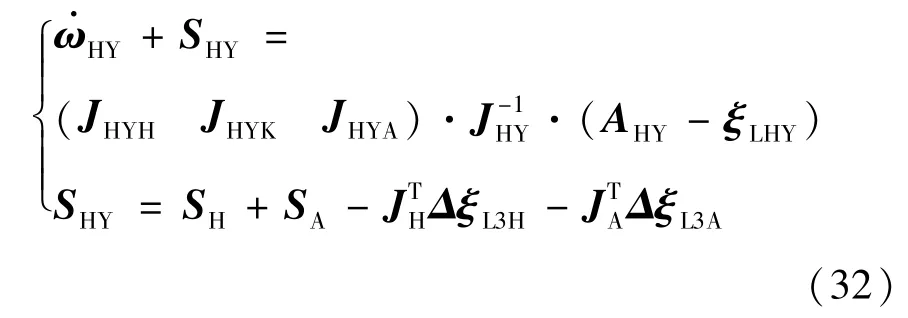
式中,ξL3H为髋关节第3 条支链的瞬时运动旋量导数,ξL3A为踝关节第3 条支链的瞬时运动旋量导数。
机械腿末端参考点的角加速度就是AHY的原部,其线速度可表示为
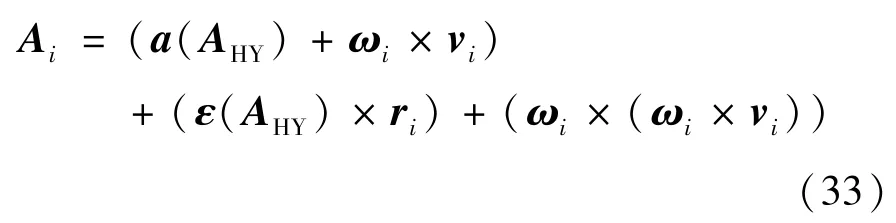
式中,Ai为机械腿末端参考点线速度,a(AHY)为AHY的对偶部,ε(AHY)为AHY的原部。
5 仿真验证
为了验证上述方法对混联机械腿运动学分析的正确性,基于上述模型,利用Matlab 软件验证该机构的位置解析,利用Adams 仿真得到的末端P的速度、加速度数据与理论计算值进行比较。机构的结构参数如表1 所示。
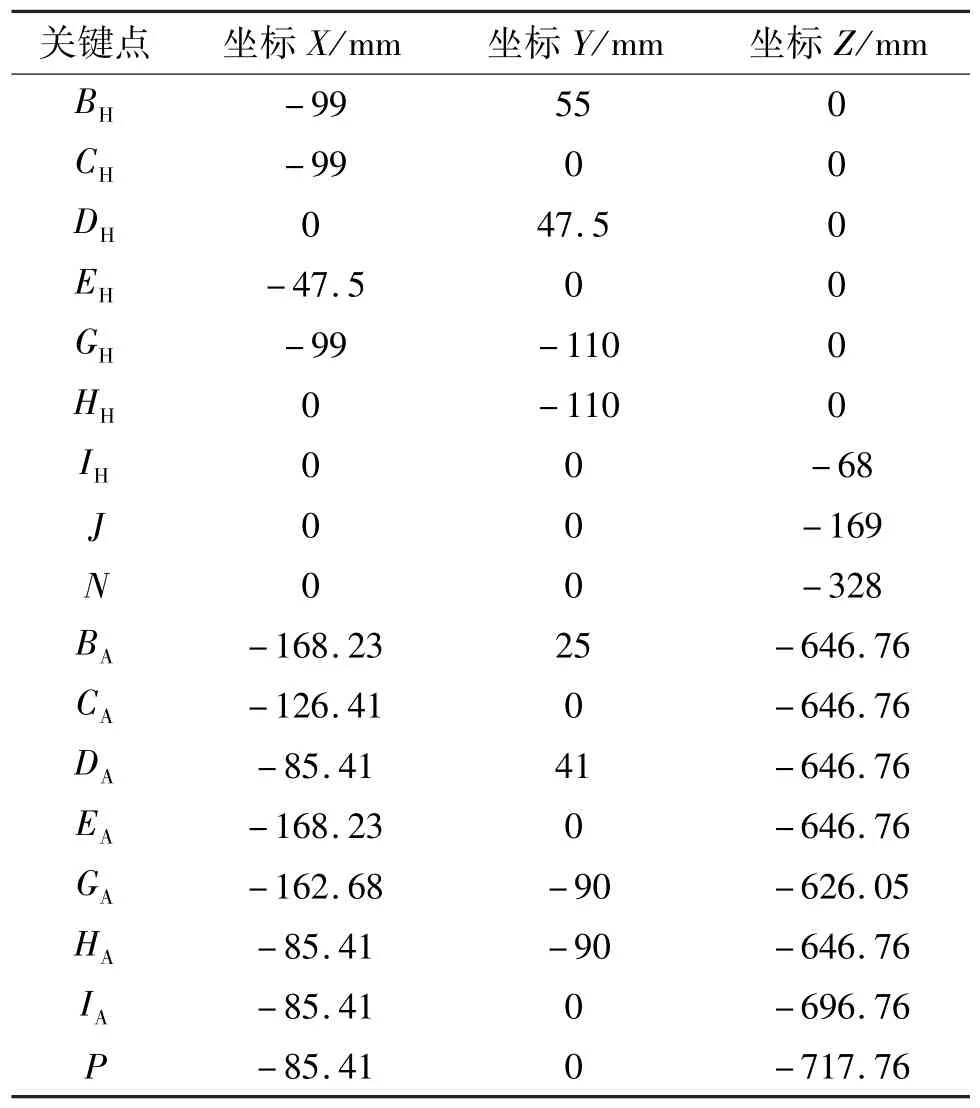
表1 机械腿结构参数
各驱动器的表达式为
位置解析式的验证步骤如图10 所示,对比结果如图11 所示;速度、加速度验证步骤如图12 所示;数值计算结果如图13 所示,对比结果如图14 所示;结果表明位移、角速度、角加速度、线速度、线加速度的最大误差分别为1.5×10-11mm、-4.6×10-6°/s、2.8×10-6°/s2、1.5×10-3mm/s、9×10-4mm/s2,位移误差值很小,速度与加速度存在一定的偏差,但最小的误差数量级为10-4,可以忽略不计,从而验证了机械腿运动学模型的正确性。
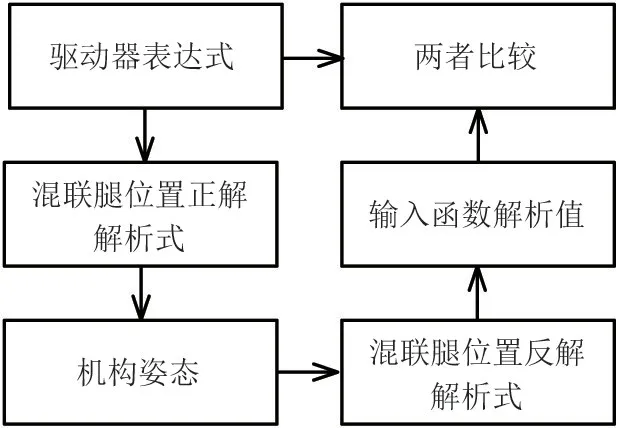
图10 位置解析验证步骤
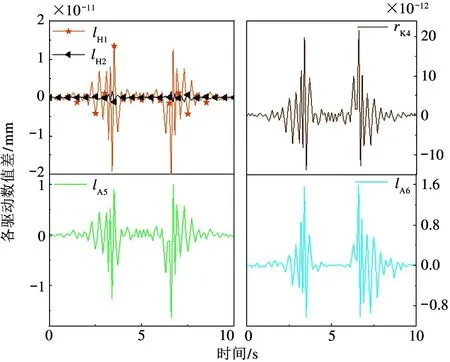
图11 各驱动器位置解误差
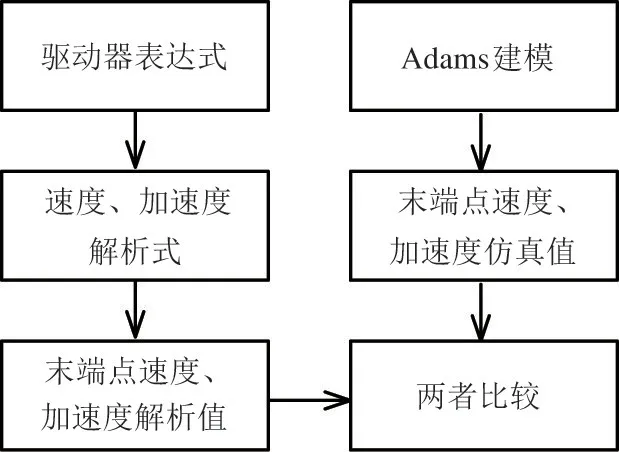
图12 速度、加速度验证步骤
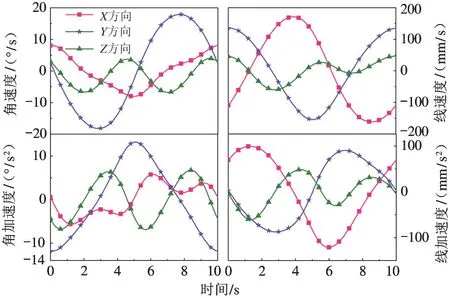
图13 使用旋量理论计算速度、加速度
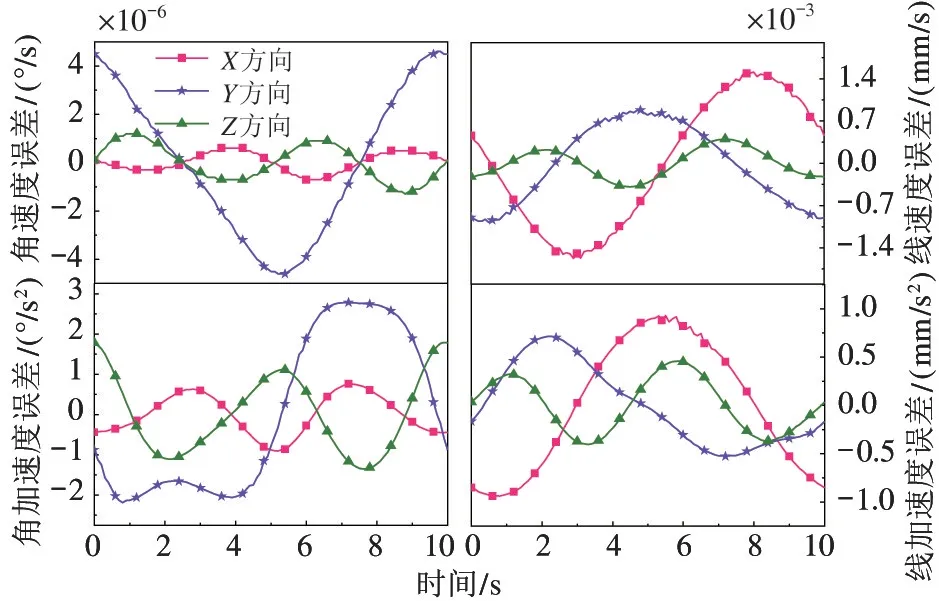
图14 理论计算与Adams 仿真的误差
6 结论
(1)本文基于人体腿部的运动分析,提出了一种新型混联拟人机械腿构型,因其并联关节均为2自由度部分解耦并联机构,无需采用复杂的求解算法,因此易于运动学解算。
(2)阐述了机械腿的布局形式,结合空间几何法与Paden-Kahan 子问题,弥补了Paden-Kahan 子问题无法解决冗余运动链位置反解的不足,给出了拟人机械腿的位置反解方程。该方法物理意义明确,计算量少,易于编程;鉴于机构的几何特性,采用代数法推导了位置正解显式表达式。
(3)结合旋量理论和Klein 型对该混联机械腿的运动学传递矩阵进行了推导,得到了腿部末端点的速度与加速度,该方法无需计算并联机构中各支链被动关节的速度与加速度,简化了运算过程。
(4)通过理论分析和虚拟样机仿真,验证了基于旋量理论建立的混联拟人机械腿运动学模型的正确性和有效性,为该机构后续的研究奠定了理论基础。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
快乐语文(2020年15期)2020-07-06
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
快乐语文(2019年12期)2019-06-12
电子制作(2019年23期)2019-02-23
快乐语文(2018年27期)2018-10-20
消费导刊(2018年8期)2018-05-25
小学生学习指导(低年级)(2018年6期)2018-05-25
燕山大学学报(2015年4期)2015-12-25