基于事件触发传输机制的分布式融合估计①
2022-07-26 06:05岳细鹏王如生
高技术通讯 2022年5期
岳细鹏 王如生 陈 博 俞 立
(浙江工业大学信息工程学院 杭州 310023)
0 引言
近年来,随着通信技术、网络技术和传感器技术的飞速发展,多传感器信息融合(multi-sensor information fusion,MSIF)在信号处理领域成为了备受关注的研究课题[1-5]。MSIF 的基本原理就像人脑综合处理信息的过程一样,充分利用多个传感器的冗余信息提高了系统的估计性能和可靠性。多传感器信息融合估计作为信息融合领域的一个重要分支,在诸多军事和民事领域有着重要的应用价值,如防空[6]、目标跟踪与导航[7-8]、智慧医疗[9]和工业安全监测[10]等,给日常工作和生活带来了极大的便利。在传统的MSIF 系统中,传感器与融合中心通过专线连接,布线复杂度和设计难度随着传感器数量的增多而大幅增加。通信网络作为信息传输的枢纽开始进入人们的视野时,出现了网络化多传感器融合系统(networked multi-sensor fusion systems,NMFSs)[11]。这种网络化系统极大地增强了系统的可扩展性和可维护性,降低了布线的复杂度和设计成本,提高了系统的可靠性和故障容错能力。因此,NMFSs 估计已经成为一个重要的发展趋势,其应用范围和作用在不断扩大。然而,多传感器融合系统中通信网络的引入使得信息传输机制发生了根本变化,也必然带来通信受限的问题。大量的传感器节点通过无线网络来传输它的局部信息,不可避免地会增加网络通信负载。此外,在许多场景下,传感器节点是由能量有限的电池来进行供电,使得系统的性能在一定程度上受到能量的约束[12]。因此,本文研究了一类通信受限下网络化多传感器系统的融合估计问题。
由于通信带宽受限,每个采样周期内往往只有部分测量信息能通过网络信道传输到融合中心并用于融合估计。在此情况下,文献[13]提出了一种周期性分组传输策略,对每个子系统分别进行卡尔曼滤波,得到最优局部估计,再通过矩阵加权得到线性最小方差意义下的最优融合估计。文献[14]通过选取局部估计信号部分分量,采取压缩降维策略来解决通信带宽约束问题。文献[15]利用量化的方法,通过减小传感器测量信息的包长来降低各节点与融合中心的通信量,满足带宽要求的同时节省了能量,然而多维信号的直接量化是非常困难的[16]。
当前,基于事件触发的数据传输机制在学界引起了广泛讨论,被普遍认为是解决上述问题的一种有效方式和途径[17]。所谓事件触发(event-triggered,ET),是指控制任务是否执行由事先给定的事件触发条件决定,而不是根据时间情况。与传统的周期触发控制机制相比,事件触发控制方案可以有效减少计算资源,降低通信量[18-19]。近年来,基于事件触发所设计的数据传输策略层出不穷,依据事件触发条件的设计原理可以将这些策略大致可以分为4 种:(1)基于方差的事件触发策略[20];(2)基于状态的事件触发策略[21-22];(3)基于量测输出的事件触发策略[23-24];(4)基于新息的事件触发策略[25-26]。目前在基于事件触发的状态估计问题中,文献[20]设计了基于估计误差方差的事件触发机制,通过选择合适的方差阈值,在减少通信量的同时保证了估计性能。结合状态估计与误差协方差,文献[22]提出了一种新的基于事件触发的一致卡尔曼滤波算法,证明了每个节点的状态估计误差均方有界,保证了滤波器的稳定性。文献[24]探讨了含有参数不确定性离散系统的状态估计问题,对于网络带宽有限的约束,设计了事件触发机制和对数量化器来降低数据传输。文献[25]利用一种随机事件触发调度策略,推导出了最小均方误差估计器,并保持了系统状态的高斯特性。文献[27]则在文献[25]的基础上,将这种随机事件触发调度策略推广到了多传感器系统中。随后,文献[28]通过引入一组二进制数值来模拟信息传输过程,提出了一种基于事件触发的分布式融合卡尔曼滤波算法,且设计了新的信息补偿策略。文献[29]则进一步通过设计基于事件触发的最小均方误差估计器,提出了基于事件触发的分布式融合估计算法。
值得注意的是,上述基于事件触发的分布式融合估计算法都是考虑协方差已知的高斯白噪声,然而在实际应用中,噪声的高斯特性假设难以满足,且协方差也难以准确获取。为了克服这种缺点,文献[30]提出了一种噪声统计特性未知下的分布式融合估计算法,但未考虑通讯受限的网络化多传感器系统。因此,本文针对一类通信受限的网络化多传感器系统,设计了一种噪声统计特性未知下基于事件触发机制的分布式融合估计算法。由于网络带宽和节点电池容量受限,在每个采样周期内,只有当满足预先给定的事件触发条件时,传感器才会将量测数据通过通信网络发送给估计器,更新量测数据;否则,就保持上一次发送的量测数据不变。本文基于有界递归优化思想[30],通过充分利用事件触发机制后的量测数据设计了局部估计器和分布式融合准则,从而在保证估计精度的基础上减少通信资源。最后,通过一个仿真例子验证了本文所提方法的有效性。
1 问题描述与分析
考虑通信受限情况下的网络化多传感器分布式融合估计问题,其结构框架如图1 所示,离散状态空间模型描述为
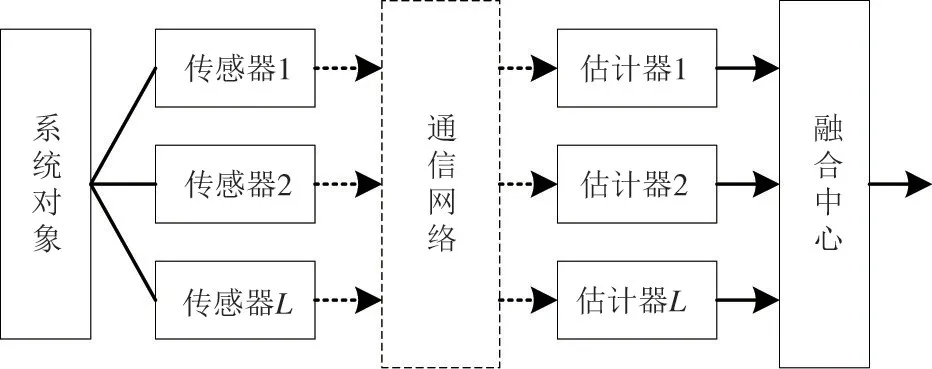
图1 网络化多传感器分布式融合估计框架图
其中,x(t) 为系统的状态向量,yi(t) 为系统第i个传感器的量测输出。假设(A(t),Ci) 可观,A(t)∈Rn×n和B(t)∈Rn×m均为时变矩阵,Ci、Di是具有适当维数的常数矩阵。ω(t)∈Rm和vi(t)∈分别是过程和量测噪声,即

其中,δω和是未知参数。
将系统式(1)中的第i个测量方程记为系统式(1)的第i个子系统,并假设每个估计器都有能力计算系统式(1)的局部最优状态估计。当所有子系统通过通信网络将局部状态估计发送到融合中心时,必然导致巨大的数据流通过网络,造成网络的负载量急剧增加。同时,这些数据流会参杂着大量的冗余信息,极大地浪费了网络带宽资源和节点能量。为了节省资源和降低通信带宽的占用,本文提出了一种基于事件触发的数据传输机制,并将其应用到网络化多传感器分布式融合估计框架中。与文献[30]相比,本文所设计的基于事件触发的分布式融合算法,在保证估计性能的前提下,有效地降低了网络中的数据传输量,节省了网络资源。
2 传感器的事件触发机制
对于第i个单传感器子系统,其基于事件触发的局部状态估计框架图如图2 所示,系统由传感器、事件触发机制(event-triggered mechanism,ETM)、零阶保持器(zero-order hold,ZOH)以及局部估计器(local state estimator,LSE)组成,传感器与远程估计器通过无线网络进行数据传输。
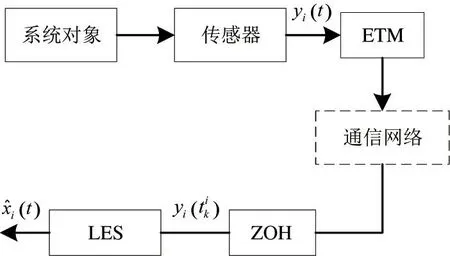
图2 基于事件触发的局部状态估计框架图
基于事件触发机制的数据传输机制,只有在满足特定的事件触发条件时,才将传感器的测量信息发送给远端的估计器,使得远端估计器更新输入信号。其中,零阶保持器用于保存上一次局部估计器的输入信号,直到下一个事件触发时刻产生。本文基于量测误差设计一种离散事件触发机制[24],事件触发条件由量测输出值和事件触发产生的量测误差决定。这种事件触发机制优点在于量测输出值易于获取,不需要连续对事件触发条件进行检测,只需要在离散时刻点来检测是否满足事件触发条件,可以方便在标准的时间尺度嵌入式软件中实现。其具体设计如下。
第i个传感器的量测数据传输时刻(t0=0),其定义为

其中,δi∈[0,1) 是事件触发参数,传感器的量测输出数据仅在时刻更新。
另外,定义量测输出误差为

由数据传输时刻式(3)定义如下事件触发条件:

基于以上分析,第i个通信信道的传感器ETM总结如下。
(1) 量测误差无法满足式(5)时,传感器的量测输出得到更新,局部估计器的输入=yi(t)。
(2) 量测误差满足式(5)时,局部估计器的输入保持上一时刻输入不变,即。
3 基于事件触发的局部状态估计
本小节将给出系统模型式(1)在事件触发机制下局部估计器的设计方案。为便于后续证明,引入以下引理。
引理1(Schur 补引理[31]) 假设一个对称矩阵S能够划分为以下4 个部分。
其中,S11和S22也是对称的,则以下3 个条件等价。
(1)S<0;
(2)S11<0,S22-<0;
(3)S22<0,S11-<0。
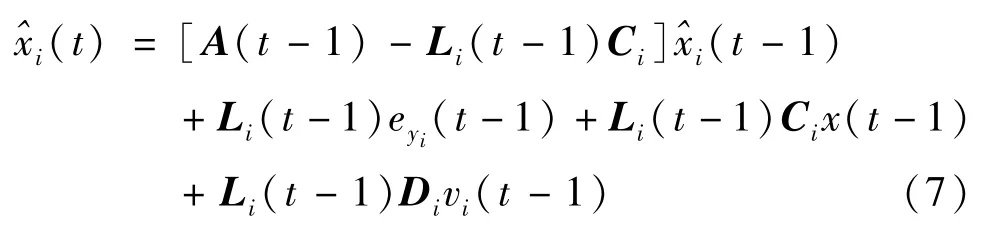
根据上文分析,在每个传感器中,量测信息的传输由其ETM 决定。因此,系统式(1)局部状态估计设计为

其中,Li(t-1) 是第i个局部估计器的增益矩阵,是第i个局部估计器在t时刻基于ETM 收到的量测数据。
定理1对于给定的事件触发参数δi∈(0,1),最优局部估计器增益Li(t) 可通过求解如下的凸优化问题获得:
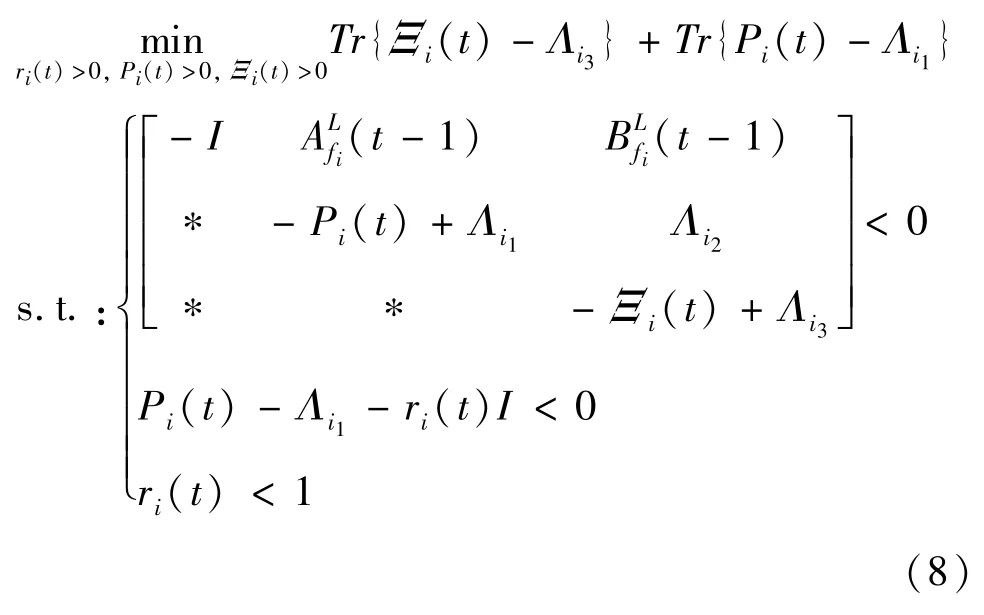
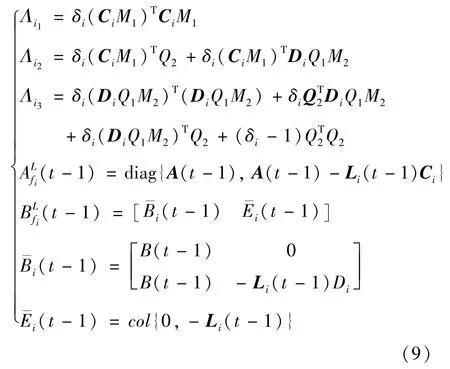
其中,

证明令局部估计误差ei(t)≜x(t)-,由式(1)和式(7)可得:
引入如下的性能指标[30]:

其中Pi(t)>0,Ξi(t)>0。根据事件触发条件式(5),令

易知Ωi(t)>0,经变量代换后,整理可得:
此外,引入事件触发机制后,原性能指标Ji(t)可改写为

整理可得:
其中,
结合式(1)和式(4),式(14)可改写为
由引理1 可知,式(8)中的第1 个不等式等价于Yi(t)<0,也意味着式(8)中第1 个不等式成立有<0,因此有:
当式(8)中第2 个不等式Pi(t)--ri(t)I<0 成立时,则有λmax(Pi(t)-)<ri(t),那么式(19)可写为
根据式(20)可导出:
此外,当式(8)中第3 个不等式ri(t)<1 成立时,则有[30]:

4 基于事件触发的分布式融合估计
融合估计算法的关键问题是如何高效地融合来自多个传感器信息,以减少系统中不确定性,提高系统的估计精度[32]。本节基于文献[30]所提出的融合估计算法,针对网络化多传感器系统,设计了基于事件触发的分布式融合估计算法。上一节根据每个子系统的事件触发机制设计了局部状态估计器。接下来,将局部状态估计传递给融合中心,通过分布式融合算法来进一步提高估计精度。
定理2基于局部状态估计式(7),分布式融合估计为

其中,
证明定义融合估计误差eo(t)≜x(t)-,由式(1)和式(25)可得:

为了设计式(25)中的加权融合矩阵,由文献[24]可知,误差融合系统可通过局部估计误差式(11)和融合估计误差式(28)来构造,即
其中,eF(t)≜col{e1(t),…,eL(t)},ψ(t)≜col{ω(t),v1(t),…,vL(t),}。此外,和W(t)如式(27)定义。
其中,
利用引理1 可知,式(26)中的第1 个不等式等价于Φ(t)<0,注意到=Tr{Γ(t)}+Tr{H(t)},则式(30)可写为

因此,在设计加权融合矩阵的时候,选择minTr{Γ(t)}+Tr{H(t)} 作为优化目标。证毕。
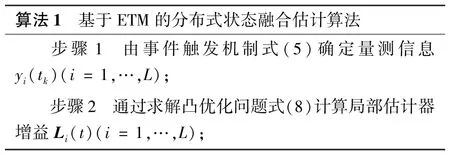
综上所述,基于事件触发的分布式融合估计算法如算法1 所示。
5 仿真示例
考虑一个具有2 个传感器的网络化系统。定义系统状态向量x(t)≜col{x1(t),x2(t)},则其离散状态模型表述为

其中,
A(t)=,B(t)=col{0.3+f(t),1},f(t)=0.1×sint,量测方程中所涉及的参数C1=[2 1],C2=[1 2],D1=0.4 和D2=0.2。ω(t) 是过程噪声,vi(t)(i=1,2) 是第i个传感器的测量噪声,其参数设置如下:ω(t)=0.1φ1(t)-0.05,v1(t)=0.02φ2(t)-0.01,v2(t)=0.05φ3(t)-0.02,其中φi(t)(∈[0,1]) 是一个随机变量。
考虑系统通信受限,引入式(5)中的事件触发机制,并分别设置2 个传感器的事件触发参数δ1=0.2,δ2=0.1。同时引入RET来衡量传感器量测输出信息的传输率:
其中,N1表示采用ETM 的传感器量测输出传输次数,N2表示未采用ETM 的传感器量测输出传输次数。
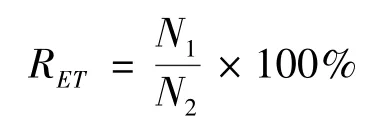
为了验证所设计基于事件触发的分布式融合估计器的性能,利用算法1,通过Matlab 中LMI 工具箱求解式(8)和式(26),得到:
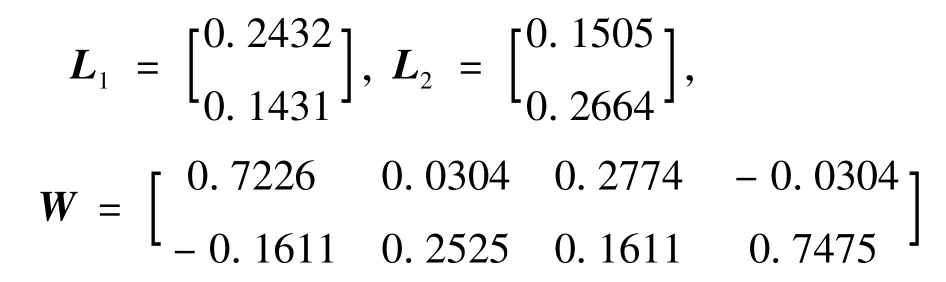
系统的真实轨迹,局部状态估计轨迹和融合估计轨迹如图3 所示。由图可见,本文所设计的基于事件触发传输机制的局部估计器和分布式融合估计器,在通信受限和有界噪声情况下,仍能较好地跟踪目标状态真实轨迹。此外,局部估计误差和融合估计误差如图4 所示,由图可知,分布式融合估计的误差曲线均位于局部估计器的误差曲线下方,表明了本文设计的融合估计器相较于局部估计器有更好的估计精度。因此,在事件触发数据传输机制的影响下,本文提出的分布式融合算法仍有较好的估计性能。
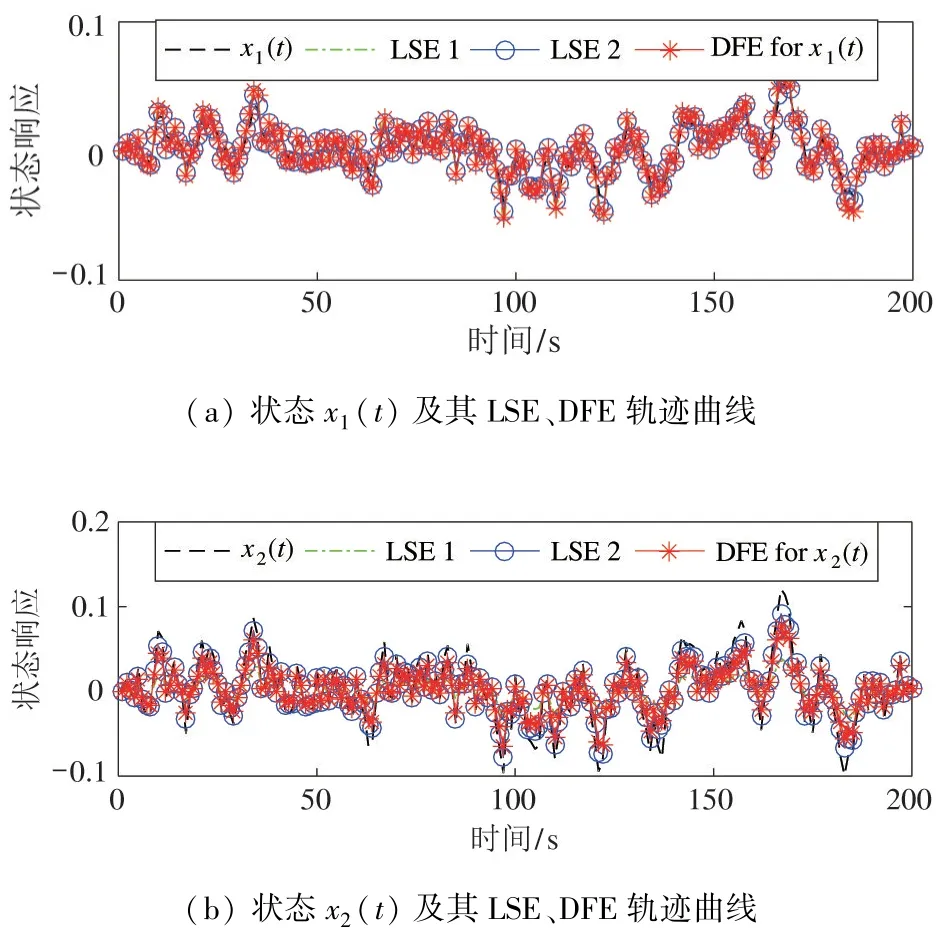
图3 真实状态及其LSE、DFE 轨迹的对比曲线
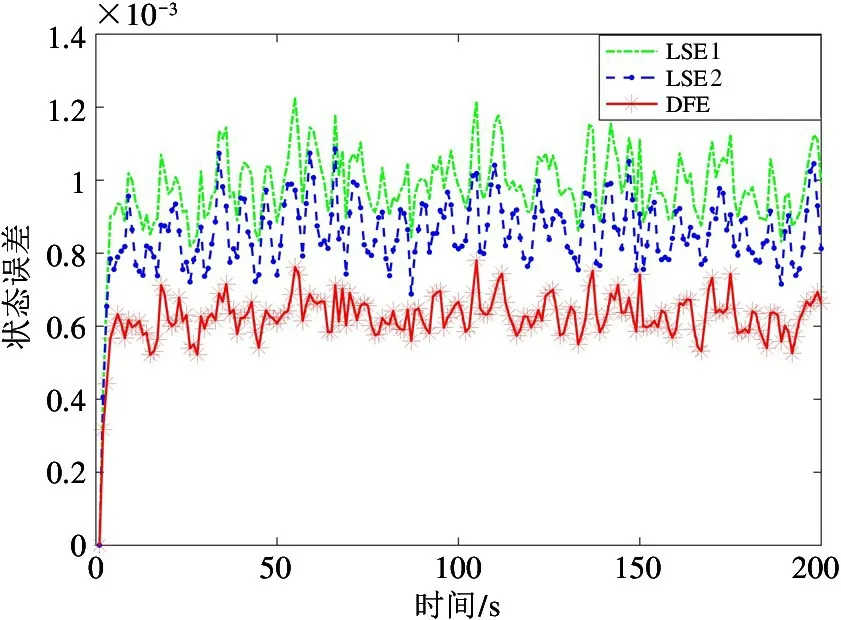
图4 局部估计误差与融合估计误差对比曲线
图5 描绘了传感器量测输出信息的事件触发数据传输模态,图中纵坐标数值为1 时,表明此刻满足事件触发条件,传感器当前的量测信息通过无线网络传输给局部估计器,估计器的输入得到更新;纵坐标数值为0 时,表明此刻不满足事件触发条件,局部估计器的输入保持上一时刻不变。具体量测传输数据如表1 所示。
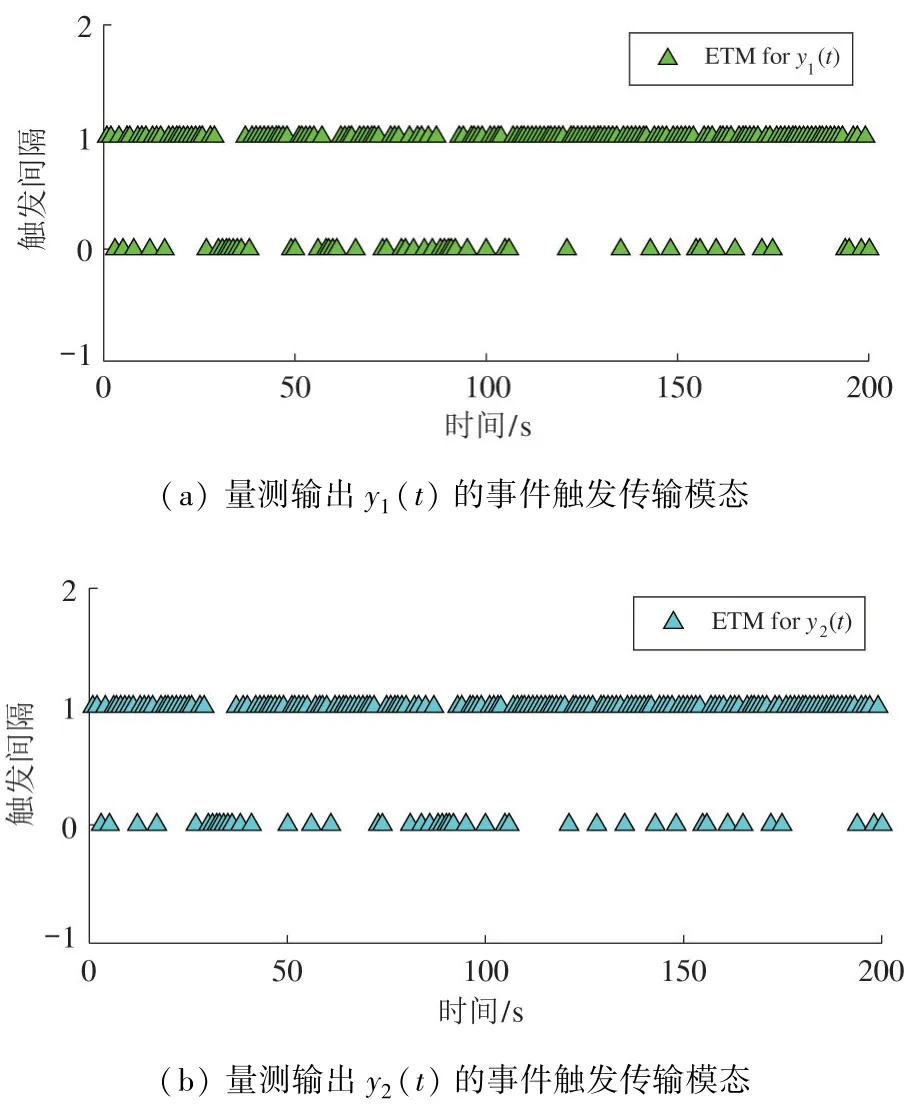
图5 量测输出的事件触发传输模态
从表1 中可以看出,针对量测输出y1(t) 的传输率RET=74.5%,比未采用ETM 的数据传输策略节约了25.5%的网络资源;针对量测输出y2(t) 的传输率RET=78%,比未采用ETM 的数据传输策略节约了22%的网络资源。由此可见,事件触发数据传输机制的引入,使得估计器在保证估计性能的前提下,有效降低了网络中的数据传输量,节省了网络资源。
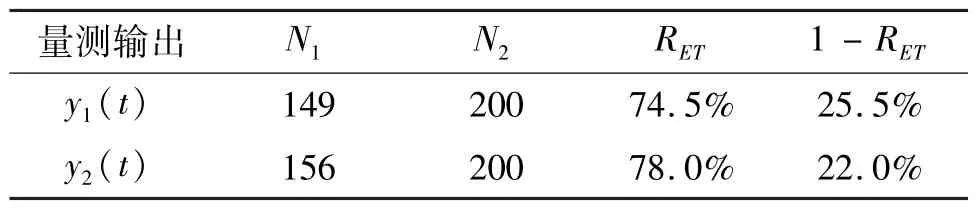
表1 实验数据分析
6 结论
本文考虑了一类通信受限情况下网络化多传感器的分布式融合估计问题。首先,给出了传感器的事件触发传输机制,每个传感器的测量输出由所设计的事件触发机制决定。然后,利用量测信息和原状态构建的增广的分布式事件触发误差系统,再基于有界递归优化思想,提出了一种基于事件触发的局部估计器和融合估计准则。进一步,利用线性矩阵不等式将问题转化为凸优化问题,并通过求解凸优化问题得到相应的局部估计增益和分布式加权融合矩阵。最后,通过一个仿真示例验证了所设计的分布式融合估计算法的有效性。
猜你喜欢
湖南电力(2022年3期)2022-07-07
中华书画家(2021年12期)2022-01-06
哈尔滨轴承(2020年2期)2020-11-06
散文诗(2020年1期)2020-07-20
今日中国·法文版(2020年7期)2020-07-04
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
制导与引信(2017年3期)2017-11-02
东方艺术·国画(2016年3期)2017-02-08
发明与创新(2016年38期)2016-08-22