从复杂背景下抽象几何模型研究
2022-07-22 12:34福建厦门双十中学思明分校361000康晓灵
中学教学参考 2022年11期
福建厦门双十中学思明分校(361000) 康晓灵
下面以一道考试题为例,浅析如何在复杂背景下抽象出几何模型。
一、题目呈现
如图1,在平面直角坐标系中,O为坐标原点,动点P从点A出发以每秒2个单位长度的速度沿线段AO向终点O运动,同时动点Q从点O出发以相同速度沿y轴正半轴运动,当点P到达点O,两点同时停止运动。
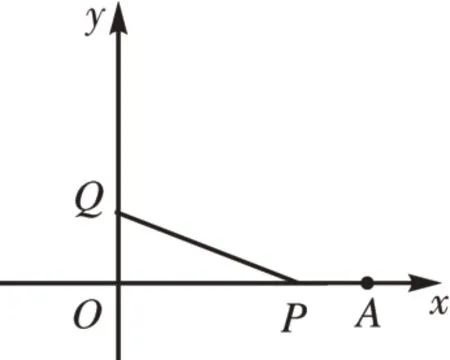
图1
(1)当t=______时,∠OPQ=45°;
(2)如图2,以PQ为斜边在第一象限作等腰直角三角形PQM,求点M坐标;
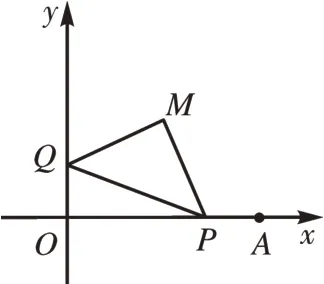
图2
(3)在(2)的条件下,点R为x轴负半轴上一点,且,点M关于PQ的对称点为点N,当t为何值时,△ONR为等腰直角三角形。
二、题目分析
本题是一道在坐标系背景下,结合动点的综合题。八年级学生刚刚学完三角形全等的基本证明,对于全等三角形的性质和判定还不够熟练,在面对稍微复杂的图形,特别是线条比较多的情况时,要能根据题目看出三角形全等的条件或者找到三角形全等的证明思路不太容易。坐标系背景下的几何本身是一个难点,同时又加上两个运动的点,更是增加了难度。本题从简单到复杂,设置了三个小问题,第(1)问相对来说比较容易,从问题可以得到OQ=OP,进而求出时间t。第(2)问的难度中等,但是大部分学生拿不到分,原因在于遇到两个动点P,Q,不知道如何表示,同时也不知道如何利用含有t的式子来表示出边之间的关系。有部分学生由已知条件的等腰直角三角形,想要表示出两条直角边的长度,于是利用了还未学的勾股定理,而这样不仅增加了计算量,还算不出来。出现这种情况的根本原因是学生无法抽象出基本图形,构造全等,看到点的坐标不能自然想到过此点作x轴和y轴的垂线段。第(3)问,学生的困惑较大,首先因为点P,Q是运动的,位置无法确定;其次点M关于PQ的对称点比较抽象,故不容易根据题意直接画出图形;最后因为涉及等腰直角三角形,并未直接告知直角和直角边,所以需要进行分类讨论。本题对学生的抽象思维能力要求较高,是一道综合性题目。
三、学情分析
八年级学生已经学习了基本的几何图形——线段和角,同时也学习了三角形和平行四边形,从一般到特殊的研究思路让他们更深刻地理解研究几何的各要素之间的关系。因此,学生对探究的方向和探究的方法有一定的思考。但是很多学生对于动点问题比较畏惧,往往看到题目会比较慌张,从而影响审题,再加上是四边形的背景,尤其是特殊四边形的性质或者三角形全等的条件不易被发现时,动点放在平面直角坐标系中,学生不容易看出,所以增加了解题难度。目前学生接触得比较多的是数轴上的动点问题,而且基本是设置一个动点。学生在理解动点的运动方向、运动速度、运动的路程时,用含有参数的式子表示距离没有问题,但是对于两个动点的相对关系的寻找或者等量关系的寻找会存在一定的困难,这也是本题为什么要先做一个铺垫的原因。一方面让学生明确从简单到复杂的思考方向,增强探索欲和学习信心;另一方面为后面研究更复杂的问题做好准备,一步步引导学生探究,并抽象出基本图形,同时还作为一种方法,迁移应用到后续的更复杂的四边形和圆等几何图形的研究中。
四、解法探究
(1)特殊情况。如图3,当∠OPQ=45°时,学生不难发现,此时△OPQ为等腰直角三角形,所以OP=OQ,那么问题转化为根据OP=OQ求t的问题。因此,需要先用含有t的式子表示出OP和OQ,而速度已知,时间为t,自然得出OQ=2t,AP=2t,所以OP=8-2t,因此由OP=OQ这个等量关系可以列出方程:8-2t=2t,所以t=2。
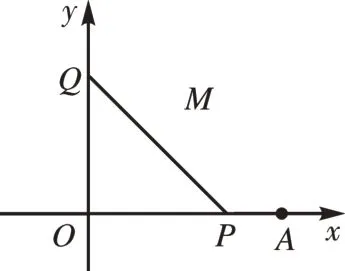
图3
(2)如图4,已知等腰直角△PQM,易得MQ=MP,∠QMP=90°,从点M的坐标入手,必须确定点M到x轴和y轴的距离,方能求出坐标,向x轴和y轴作垂线段,只要辅助线一旦作出来,那么问题就迎刃而解了。不难证出△MBQ≌△MCP,因而得到MB=MC,BQ=CP。设运动时间为t,则AP=2t,OQ=2t,OP=8-2t,则由MB=MC和点M在第一象限,可以引入参数,设M(x,x),因此OC=OB=x,所以CP=OP-OC=8-2t-x,BQ=OB-OQ=x-2t,又因为BQ=CP,所以8-2t-x=x-2t,此时x=4,t刚好消掉,第(2)问也就解决了。

图4
其实本题是一个等腰直角三角形的旋转或“一线三等角”的几何基本模型,学生若能大胆猜想,大胆画辅助线,大胆设元,就能够更快地找到解题突破口。
(3)此问是在第(2)问的条件下,那么第(2)问的条件是什么?第(2)问的条件是△PQR是以PQ为斜边的等腰直角三角形,并且求出了点M的坐标为(4,4),这些条件可以使用,接下去给出的条件是由(2)可知OP=8-2t,所以OR=4-t,而最后一个条件是点M关于PQ的对称点为点N,这是本题的棘手处,学生无法直观想象出一个定点关于两个动点所连的线段轴对称的点的位置,同时也无法求出来,并且不好画出来,无法定出点N的位置,这样就无法讨论△ONR为等腰直角三角形的可能。因此,本题最需解决的问题就是如何确定点N的位置。正因为是在坐标系背景下,所以很多学生很想准确地画出坐标系,并且尝试在各种P,Q位置作出对称,还去讨论P,Q,N在各个象限或坐标轴中运动的可能性,而且画出的图形中线段非常多,其实这是一种误导,也是一种复杂的过程。如果把坐标系背景去掉,只是单纯地根据题意画出对称图,可能图形就更为简单,对于观察模型、抽象模型也有帮助。
去掉坐标系背景,如图5所示不考虑点的坐标,不难发现等腰直角△QMP关于PQ对称的△QNP同样也是一个等腰直角三角形,那么随着P,Q的变化,点M是固定的,点N的位置肯定会变化,可能在第四象限或第二象限,在尝试作图的过程中,不难排除第四象限,而第(2)问的图形可以作为一个启发,可以求出运动时间t的取值范围,此时构成的是一个钝角三角形,并不是直角三角形,从而缩小求解范围。解决动点问题的关键是明白动中有不变。在本题中,点R虽然在动,但始终在x轴(即射线PO)上运动,所以画图又缩小了范围。最后的任务就是对等腰直角三角形的顶角和底角、直角边和斜边进行分类。
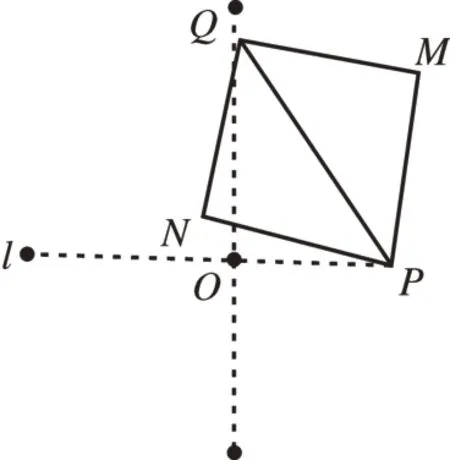
图5
①当AP<4 时,即2t<4,t<2 时,此时点M关于PQ的对称点N在第四象限,而点R在x轴负半轴,此时△ORN为钝角三角形,不符合题意。
②当t>2 时,此时点N在第二象限,点R在x轴负半轴上。
(Ⅰ)若∠ONR=90°,RN=ON,如图6,易得到“一线三等角”的基本模型,△NSP≌△PTM,从而NS=PT,SP=MT。根据M(4,4),OP=8-2t,OR=4-t,得出OP=4-(8-2t)=2t-4,所以,解得此时符合t>2。
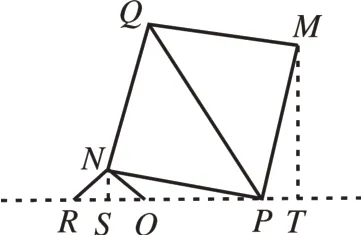
图6
(Ⅱ)若∠ORN=90°,NR=OR,如图7,比第(Ⅰ)种情况更为简单,更易得出结果,少作一条辅助线。证明△NRP≌△PTM,从而对应边NR=OR=4-t,PT=2t-4,根据NR=PT,得到4-t=2t-4,解得此时也符合t>2。
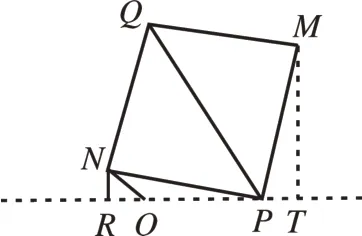
图7
(Ⅲ)若∠NOR=90°,ON=OR=4-t时,此时O,N,Q三点均在y轴上,不满足∠QNP=90°,因此不能形成等腰直角三角形。
通过本题的解法探究,笔者得到启发,对于坐标系背景下的几何综合题,如果题目中的几何线段比较多、比较复杂,且点的坐标不太受题目条件影响或者能用参数把运动变化的点表示出来,则可尝试隐去容易干扰的坐标系背景,抽象出与所要研究的要素有关的基本图形。特别是在后续的函数建模中,面对复杂的图形背景,例如拱桥问题,学生如果能隐去无关的线段或角,留下需要求的或需要用的线段进行函数的建模,就能较快地求出解析式。通过本题的深入分析,学生学会隐去无关条件,抽象出复杂背景下的简单图形和基本模型,这对后续的几何学习或者函数建模等起到重要作用。
笔者在进行二次函数的动点含参问题的教学中发现,对于抛物线上动点轨迹的寻找,点的运动特点是难点,但是当将这一难点进行拆分,画出基本图形,分解题目条件,寻找与所要求的结论相关的线段,联想已经学过的基本全等模型,或者基本等腰三角形、特殊四边形等,就很容易找到突破口。因此,学会在复杂背景下抽象出简单图形和基本的几何模型,对学生而言非常重要。对教师而言,如何引导学生去寻找、去抽象几何模型是教学难点,也是需不断探索的教学方向。
五、教学反思
对于含有复杂背景的几何问题,尤其是动点问题,教师应引导学生审清题意,并且根据命题者所设计的几个小问题串形成自己的思维链,从复杂的背景中抽象出平时所用到的几何模型。笔者在近几年的教学中发现,很多学生在遇到文字叙述较长的题目时往往没有耐心去认真阅读,对此教师要引导学生认真读题,标注关键词,厘清数量关系。在当前“双减”的大环境下,考试的灵活性越来越大,对学生的要求也越来越高,教师不能仅仅通过大量刷题来提升学生的学习能力。近年来的中考命题和实际生活联系紧密,尤其是应用题的背景越来越生活化,也正是因为生活化的背景,才有更多的文字阅读量,十分考验学生的耐心。在平时教学中,教师要多培养学生读题、审题的良好习惯。好的解题思路来源于已有的知识和经验,因此,教师还应该渗透综合分析法,引导学生通过适当添加辅助线,发现熟悉的基本图形,同时让学生自己学会总结、归纳。这样,学生对几何模型的掌握就会更加牢固。教会学生抽象图形,特别是从复杂背景中抽象出几何模型,将问题由繁化简,学生解题思路的生成就会更加自然。
猜你喜欢
现代食品科技(2022年8期)2022-09-02
中学生数理化·中考版(2022年8期)2022-06-14
中学生数理化·高一版(2022年3期)2022-04-05
甘肃教育(2020年14期)2020-09-11
初中生学习指导·提升版(2020年10期)2020-09-10
中学数学杂志(初中版)(2020年1期)2020-04-22
中学数学杂志(初中版)(2019年4期)2019-09-18
中学生数理化·中考版(2019年8期)2019-07-13
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
初中生世界·八年级(2006年7期)2006-08-04