
门座起重机大车电缆卷盘卷绕转矩计算
2022-07-22 07:32:54张焕兵
起重运输机械 2022年13期
张焕兵
武汉港迪电气有限公司 武汉 430000
门座起重机大车电缆卷盘控制系统的技术难点是始终要保证卷绕速度与设备移动速度的同步,同时还要保证卷绕过程中电缆所受拉力适中。随着起重机械需要行走的距离更远,导致卷盘的内层到外层的卷绕半径相差3倍甚至更大,其恒定力矩输出对电缆提出了更高的抗拉力要求。在满足外层电缆卷取力要求的条件下,由于磁性联轴器的卷绕力矩近似恒定,内层电缆要承受的张力会比外层大3倍以上,对于内嵌光纤的高压电缆或承载张力小的电缆易造成损坏。
门座起重机大车电缆卷盘控制系统要求收放电缆与大车运行速度同步,实现线性变张力的控制。对卷绕张力的控制是重点,采用近似估算法容易在普通的PLC中实现卷绕控制算法,但实时性和控制精度不高。采用工程数学计算方法——悬链线方程可较精准地计算电缆卷盘的张力,但不能实时地看到物理运动的动态仿真展示。采用计算机进行仿真可较直观地观察卷绕角速度、卷绕线速度、卷绕张力、卷绕转矩、卷绕功率、卷径的实时变化,通过调整输入参数,可优化算法,重新仿真观察。
1 起重机大车电缆卷盘卷缆转矩的计算步骤
悬链线方程为工程普遍适用的计算方法,具备很强的现场适应性,采用牛顿迭代法可无限逼近期望的计算精度,下面结合悬链曲线来计算起重机大车电缆卷盘卷绕转矩,需要选取悬链曲线对应的最大张力。
如图1所示,CD曲线的电缆张力不大,电缆卷盘卷缆、排缆工作自如,故选择CD曲线比较合理。图2为电缆的悬链曲线,其方程为

图1 门座起重机大车电缆卷盘卷绕曲线

图2 电缆卷盘张力计算

式中:H为电缆D点张力S的水平分力,q为电缆单位长度的质量。
1.1 水平分力H的计算
以曲线与地面的切点C为坐标原点,计算时根据合适的曲线形状和工况,先给出x0和y0值,代入式(1)得

令

整理式(2)得超越方程

将式(3)变成函数形式

过点[Z0,F(Z0)]作曲线的切线,即在该点对F(Z)求导得

该切线与横坐标的交点为Z1,则有
由此可知,Z1即为方程根新的近似值。
判断|Z1-Z0|是否小于符合实际要求的某个精度范围。例如实际要求|Z1-Z0|<10-4,若成立,则Z1即所求的近似值;若不成立,则将Z1的值赋给Z0,返回式(5)继续迭代计算。根据计算机迭代计算结果,Z取1.878 44,即为满足|Z1-Z0|<10-4条件的最终迭代结果,亦为超越式(3)的近似根。把Z的根代入(q/H)·x0=Z式中,即可求出H值为H=qx0/Z。
1.2 垂直分力W的计算
设悬链线CD的长度为Lcd,则有

悬链线的铅锤分力为
式中:q为电缆单位长度的质量。
D点电缆张力为
线缆的总转矩为
式中:S为电缆卷绕张力;D为最大卷径;i为传动减速比;η为减速装置效率,一般为0.8~0.9;K为折算至额定(堵转)力矩的系数。
将第一步计算出来的最大张力F作为预设张力Fpreset,实际张力Factual为
式中:D0为初始卷径,Dmodify为卷径修正值,D为实时卷径,K为张力锥度系数。
通过大车运行的距离进行分段,将第一步的张力计算方法分成多段区间控制的形式。大车运行的绝对距离为Length_step,则将运行距离分为4段,分别为distance1,distance2,distance3,distance4,设0<distance1<distance2<distance3<distance4,
则当0<Length step<distance1时,有

式中:Factual_1为第1区间的实际张力,Fpreset_1为第1区间预设张力,K1为第1区间张力锥度系数,D0为初始卷径,Dmodify_1为第1区间卷径修正值。
当distance1<Length_step<distance2时,有

式中:Factual_2为第2区间的实际张力,Fpreset_2为第2区间预设张力,K2为第2区间张力锥度系数,D0为初始卷径,Dmodify_2为第2区间卷径修正值。
当distance2<Length_step<distance3时,有
式中:Factual_3为第3区间的实际张力,Fpreset_3为第3区间预设张力,K3为第3区间张力锥度系数,D0为初始卷径,Dmodify_3为第3区间卷径修正值。
当distance3<Length_step<distance4时,有
式中:Factual_4为第4区间的实际张力,Fpreset_4为第4区间预设张力,K4为第4区间张力锥度系数,D0为初始卷径,Dmodify_4为第4区间卷径修正值。
第3步通过第2步计算出来的实际卷绕张力来计算实际电动机转矩,线缆的总转矩为

式中:Factual为电缆卷绕张力,Dmax为最大卷径,Km为折算至额定(堵转)力矩的系数。
则有

式中:±的加号为卷盘正转,减号为卷盘反转,Mmotor为变频器应该提供的实际卷绕转矩,Mcable为线缆的总转矩,Loss0为静阻系数,Losst为风阻系数,Nact为实际转速,ρ为电缆单位长度的密度,Hcenter为大车电缆卷盘中心高度,g为重力加速度,D为实时卷径。
2 起重机大车电缆卷盘卷缆运动的仿真模拟
如图3所述,将上述算法在计算机中通过上位机仿真模拟卷绕运动过程的卷绕张力,通过卷径和时间变化推算转动惯量进而关联计算电动机端对应输出的卷材张力、实时卷径、卷绕力矩、卷绕线速度和卷绕功率。

图3 门座起重机大车电缆卷盘卷绕运动在计算机中的仿真
基于计算机的卷绕运动卷缆算法仿真,再将核心卷绕控制算法移植到博途平台,在PLC中进行模拟现场工况的仿真如图4所示。
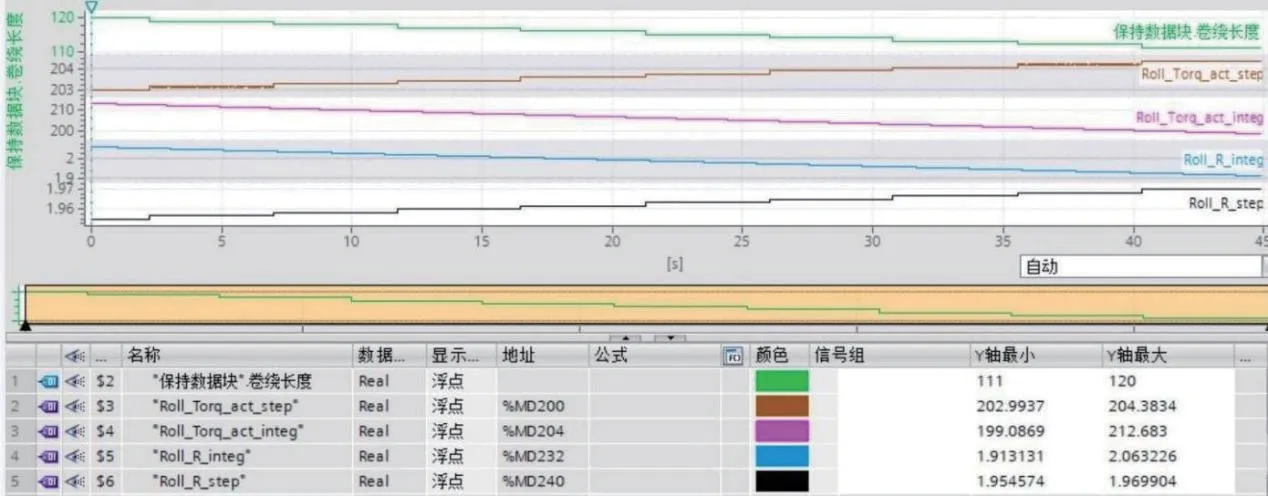
图4 门座起重机大车电缆卷盘卷绕算法在博途中的仿真
3 结束语
采用悬链曲线结合锥度张力计算是基于工业PC机实时运算张力的控制方式,只需要根据卷绕曲线建立悬链线方程,充分利用工业PC机运算资源进行实时迭代运算,迭代运算的实时结果作为过程量参与卷绕张力的实时控制,算法精度高且实时控制。实际现场可根据定制电缆卷盘的实际状态参数来提供抱闸、急停和复位信号,以及空盘、满盘的报警。根据大车的左行或右行信号,通过仿真模拟观察电缆卷盘在卷、放缆过程的正反转运动和加减速变化验证卷绕控制算法。
猜你喜欢
港口装卸(2023年6期)2023-12-29 03:55:44
快乐语文(2020年36期)2021-01-14 01:10:32
集装箱化(2020年5期)2020-07-26 14:22:13
制造技术与机床(2019年11期)2019-12-04 05:50:36
制造技术与机床(2019年9期)2019-09-10 07:36:40
中国特种设备安全(2018年10期)2018-12-18 02:17:18
铁道学报(2018年11期)2018-12-13 10:11:46
电力与能源(2017年6期)2017-05-14 06:19:48
当代化工研究(2017年12期)2017-04-17 02:17:07
启蒙(3-7岁)(2017年9期)2017-02-26 02:52:48
