
基于改进广义极大似然估计的配电网状态估计方法
2022-07-14 07:46徐艳春王格孙思涵MILu
南方电网技术 2022年6期
徐艳春,王格,孙思涵,MI Lu
(1. 梯级水电站运行与控制湖北省重点实验室(三峡大学),湖北 宜昌 443002;2. 德克萨斯农工大学电气与计算机工程学院,美国 德克萨斯州 卡城 77840)
0 引言
随着各种分布式电源与电动车充电负荷大规模接入配电网,配电网的结构和运行状况日益复杂[1]。配电网状态估计在配电管理系统(distribution management system, DMS)中处于基础性地位,其结果能够为DMS中最优潮流、无功优化以及各种高级应用提供可信的数据[2 - 4]。状态估计(state estimation,SE)是滤波的一种方法,其利用量测系统的冗余信息,提升量测数据的精度,排除不良数据的干扰,可靠估计系统运行状态[5]。
状态估计的量测数据源于数据采集与监视控制系统(supervisory control and data acquisition, SCADA)提供的远程终端单元RTU测量数据,一般包括节点注入功率、支路功率和节点电压幅值,数据传输时延长、精度低。近年来,以相量测量单元(phasor measurement unit, PMU)为基础的广域测量系统(wide-area measurement system, WAMS)提供的高精度量测数据,因其传输时延小、数据精度高、且能够直接测量节点电压、支路电流相量等优点,在状态估计中的应用受到了极大的关注[6 - 8]。PMU量测相较于SCADA量测具有一定的优势,但在短期内,现有的SCADA系统不太可能完全被PMU技术所取代,因此,这两种技术仍将并存。文献[9]通过引入中间变量和二次等式约束,将PMU和SCADA量测方程变换成直角坐标系下二次方程的形式,实现两者的混合量测,但实际混合量测系统中电压幅值量测方程并非二次形式。文献[10]引入量测变换技术,将电流和电压幅值量测转换为相应的功率量测,加速了状态估计,但量测变换技术在状态估计初期有较大的误差。文献[11 - 12]通过对多源数据融合研究,用不同方法处理PMU数据和延时较大的AMI数据,将处理过的量测数据与SCADA数据共同构成一个完整的混合量测系统,从而实现配电网鲁棒状态估计。文献[13]针对混合量测数据不同更新周期,先采用平均插值实现RTU量测的数据填补,再对其节点电压、支路电流测量值进行等效变换,同时将PMU测量数据的极坐标形式变换为直角坐标形式,从而得到混合测量变量。
另一方面,已有研究者提出采用非二次目标函数来增强估计模型本身的抗差性[14 - 15]。文献[16]提出一种基于变量代换内点法的WLAV抗差状态估计方法,能够抑制坏数据的影响,提高状态估计精度,但该方法模型复杂,计算繁琐。现有文献采用的M估计是通过等价权与常规最小二乘估计进行有机结合,计算简便且易于实现,具有一定的鲁棒性[17 - 18]。在文献[18]中由Mili L等提出了使用SCADA测量的广义极大似然(generalized maximum-likelihood, GM)估计,首次将映射统计(projection statistics, PS)运用到电力系统状态估计中,对不良数据具有较强的鲁棒性且有很高的计算效率。为了更好地适应状态估计中生成的雅可比矩阵的维数变化,本文在传统PS基础上提出自适应映射统计(adaptive project statistics, APS),同时对GM估计目标函数中的权函数进行分析和改进,将改进的GM估计方法运用到配电网状态估计中。
现有文献对于混合量测数据的处理手段大多是采取集中式SE,即将SCADA与PMU系统的量测数据进行等效变换,以扩大量测冗余,并设计出能够同时处理混合量测的状态估计器。然而,这种方法需要对现有的状态估计软件进行重大更改,来更好地适应不同量测数据的特点。此外,由于量测系统使用的测量通道不同,仪表的采样速率不同,采集的数据成分、精度、刷新频率等不同,在进行量测变换时也会产生相应误差[19]。基于此,本文提出了一种新的估计融合体系,该体系结构利用多传感器数据融合(multi-sensor data fusion, MDF)理论[20],旨在组合由不同类别传感器生成的数据。在该体系结构中,将SCADA量测系统与PMU相量量测系统视为不同类别的数据传输通道,分别执行各自估计模块,既允许基于SCADA的状态估计器保持不变,也可利用高精度的PMU量测来获得较高质量的估计。进一步地利用估计融合体系,分别与改进GM估计、加权最小二乘(weighted least squares, WLS)方法相结合运用到配电网状态估计中,用以估计系统节点电压幅值与相角。改进的IEEE 14与IEEE 33节点配电网算例的仿真分析,验证本文所提方法的可靠性与有效性。
1 基于自适应映射统计的改进GM估计
在给定电网中的量测信息、线路参数和网络结线的条件下,状态估计的非线性量测方程为:
z=h(x)+e
(1)
采用加权最小二乘估计准则进行状态估计的目标函数为:
minJ(x)=[z-h(x)]TW[z-h(x)]
(2)
式中:z为m维量测量向量;x为n维状态变量向量;h(x)为系统的非线性量测函数;e为m维量测误差向量;W代表权重,W=R-1,R为量测误差矩阵。利用高斯-牛顿法迭代求解,得到式(3)。
G(xk)Δxk=HT(xk)W[z-h(xk)]
(3)
式中:H(xk)为第k次迭代时的雅可比矩阵;Δxk为第k次迭代状态量的修正量;信息矩阵G(x)=HT(x)WH(x); 相应误差协方差矩阵表示为P=G-1(x)=(HT(x)WH(x))-1。
1.1 改进广义极大似然估计
在WLS法基础上发展而来的极大似然型估计是最基本的鲁棒估计方法[21 - 22]。由其估计原理可得广义极大似然状态估计模型的目标函数为:
(4)
式中:rsi为标准化残差;ρ(·)为反映抗差能力的权函数;m为量测总数;wi为权重系数,其表达式为:
(5)

1.1.1 自适应映射统计
在状态估计模型中,当量测值偏离周围的群值时则称该点为异常点,为了降低异常值对估计精度的影响,对异常值辨识和降权具有重要意义。经典的离群点检测方法主要是马氏距离检测法,在此基础上改进的映射统计法[18]是一种更加稳定的检测方法。
通过对多维系数空间中异常向量的位置和协方差的多变量进行估计,利用映射统计PS来辨识空间中的不良数据,并得到相应的映射统计值:
(6)


1.1.2 权函数的分析与改进
式(4)中权函数的选择将会影响估计的性能,常用的权函数有Huber函数、Ramsay函数、丹麦法等。在M估计中常常选用Huber函数,其计算精度受显著误差影响不大,具有一定的鲁棒性,也不受初值的影响,具有一致收敛的优点,同时也可以保持很高的统计效率,由Huber最早提出[23],表达式如式(7)所示。
(7)
式中:μ为标准化残差;a为调和常数。通过定义函数ψ(μ)=∂ρ(μ)/∂μ, 以及w(μ)=ψ(μ)/μ可以得到权重函数:
(8)
大量试验证明当调和常数a取1.345时能够达到鲁棒性与估计效率的最优平衡点[24]。对残差极小的数据予以保留,给予足够的权重;对残差相对较大的数据,其权重收敛速度应较快,但也应赋予该数据一定的权重。由此在Huber函数的基础上,设定b点,采用收敛速度较快的指数函数进行改进。综上对改进的权函数进行分段处理:
(9)
通过对不同权函数的分析及测试,选取调和常数b、c的值分别为4.685和0.3。因此改进的权函数采取三段式,在残差较小时属于正常波动范围,采取Huber权函数方案,权重赋予1;当残差极大时收敛速度加快,但不为0,使得每组数据都赋予一定的权重。
1.2 迭代求解
当式(4)中目标函数J(x)取极值时,有:
(10)
在式(10)两边乘上R-1, 矩阵化得到:
HT[z-h(x)]R-1Q=0
(11)

(12)
式中:xl、xl+1分别为第l次和第l+1次迭代得到的状态量;Δxl为第l次迭代状态量的修正量。当满足收敛判据max|Δxl|≤0.001时,该算法收敛。综上,其具体计算步骤如下,流程图如图1所示。

图1 计算步骤流程图Fig.1 Flow chart of calculation steps
1)输入系统参数,计算节点导纳、电阻和电抗矩阵;
2)根据系统数据进行潮流计算,在潮流计算的结果上叠加相应误差后作为状态估计量测量的值;
3)对参数进行初始化,设置最大迭代次数tmax以及当前迭代次数t=0;
4)计算量测量h和雅可比矩阵H, 并计算相应权重wi;
6)检验是否达到最大迭代次数,若没有,则检验收敛判据max|Δxl|≤0.001, 看其是否收敛,若收敛,转至步骤7),若不收敛,t=t+1, 转至步骤4);
7)输出计算结果,将估计值与潮流计算出的电压幅值、相角值作对比。
2 融合状态估计体系
全球定位系统(global positioning system, GPS)技术的进步带动着同步相量测量系统的快速发展,在系统中装设PMU后,引入较高精度的测量数据,这些测量数据与SCADA测量相结合,将改善状态估计的性能。本文采用的估计融合体系是将其看成两个独立的估计模块,保持原有SCADA估计系统不变,对于PMU量测数据的处理如下所述。
2.1 PMU相量量测
两个独立模块分别处理SCADA量测zs和相量量测zp以及相应的测量误差协方差Rs和Rp。 由于部署在网络上的PMU数量有限,因此在处理这类测量的估计模块时必须具有处理先验状态信息的能力。本文使用来自SCADA鲁棒估计的结果xs来增加PMU量测值,得到以下形式:
Z=Hx+ε
(13)

y=Ax+ξ
(14)
式中:y、A和ξ分别为计算得到的量测向量、量测矩阵以及量测误差向量,E[ξξT]=I。 按照改进的GM估计器的类似步骤,可以得到:
ATR-1Q(y-Ax)=0
(15)
使用IRLS算法进行迭代求解,第j次迭代修正方程为:
(16)
式中:xj、xj+1分别为第j次和第j+1次迭代得到的状态量;Δxj为第j次迭代状态量的修正量。
2.2 状态融合背景及其结构

(17)

(18)
式中:Ψ1,…,ΨNs为加权矩阵,通过求解以下优化问题来获得,该优化问题旨在最小化估计误差方差。

(19)
在实际应用中若只考虑两类传感器,即取Ns=2, 可以得到:
(20)
对于只有两类传感器的特殊情况,此时的最佳估计结果为:
(21)
2.3 SCADA/PMU估计融合

(22)
式(22)被称为状态融合估计,由公式可知每个估计分量的权重矩阵是与彼此的误差协方差矩阵相关联的。由于不准确的估计使得协方差矩阵数值较大,所以对于状态估计而言,质量更好的协方差估计应该得到更好的权重。为了进一步简化计算,由信息矩阵与误差协方差矩阵之间的关系可得:
(23)
进一步转化为:
(24)
式中:Gs和Gp分别为相应的增益矩阵,上述方程可以通过稀疏三角分解以及替换而求解。
在一定的条件下,基于估计融合得到的估计值与集中式状态估计得到的估计值基本相同。具体而言,集中式状态估计与融合状态估计表现出相同性能的条件是:1)各传感器集的测量误差是不相关的;2)量测矩阵列满秩。而对于SCADA与PMU量测数据的状态估计,假设SCADA与PMU的测量通道是独立的,则可以允许测量误差是不相关的;而观测矩阵对应于量测雅可比矩阵,这要求SCADA与PMU是可观的。
3 仿真部分
3.1 改进IEEE 14节点仿真分析
改进IEEE 14节点配电系统拓扑结构如图2所示,在节点3、14接入光伏电池,节点7、9接入风电机组。风电机组和光伏电池的参数见表1和表2。
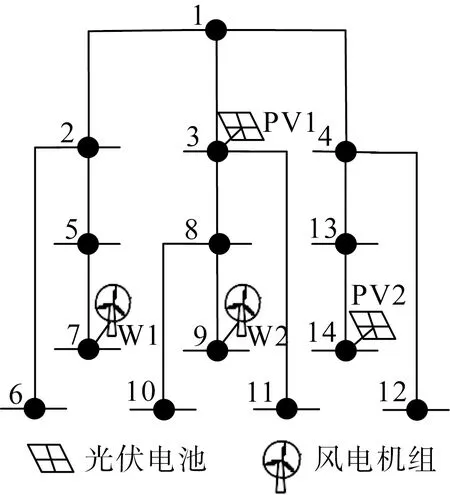
图2 改进IEEE 14节点配电网络Fig.2 Improved IEEE 14 node distribution network
光伏电池组采用文献[26]模型,风电机组采用文献[27]模型。在潮流真值的基础上添加服从高斯分布的误差得到量测量,其中SCADA量测叠加误差均值为0,标准差为0.02;基于可观性采用0-1整数规划,得出在节点2、9、13处配置PMU装置,其电压幅值和相角叠加误差均值为0,标准差为0.005/0.002。采用改进GM估计法分别对SCADA量测与含PMU量测的状态估计结果进行仿真分析。同时为了验证本文估计融合体系的有效性,将基于WLS的集中式状态估计与融合状态估计结果相比较,进而分析相关估计指标。最后,在估计融合体系上进行WLS方法与改进GM估计方法的仿真测试,进一步验证改进GM估计与估计融合体系相结合方法的有效性与可靠性。

表1 风电机组参数设置Tab.1 Wind turbine parameters settings

表2 光伏电池参数设置Tab.2 PV cell parameters settings
对表1和表2的参数设置进行说明:Pr为风电机组的额定功率;vin、vr、vout分别为切入、额定、切出风速;K和C表示风速的分布特征与平均风速,设定风机恒功率因数运行。A为光伏阵列面积;η为光伏电池光电转化效率;r为光照强度;α、β为Beta分布的形状参数。设定光伏电池组恒功率因数运行,并对配电网只提供有功功率。
3.1.1 仿真分析
基于改进GM估计法分别对SCADA量测与含PMU量测的状态估计进行仿真分析,以潮流结果为真值,节点电压幅值与相角绝对误差为对比指标,得到图3和图4。
由图3可知,基于SCADA量测与含PMU量测得到的电压幅值误差曲线都较平稳,但SCADA量测数据得到的结果误差较大些,而PMU量测数据得到的电压幅值绝对误差的最大值为0.010 8%,平均值为0.004 0%。由图4可知,SCADA量测估计得到的电压相角绝对误差波动范围比较大,PMU量测结果中电压相角绝对误差的最大值达到0.112 1,平均值为0.051 0。

图3 节点电压幅值状态估计值误差分布Fig.3 State estimation value error distribution of node voltage amplitude
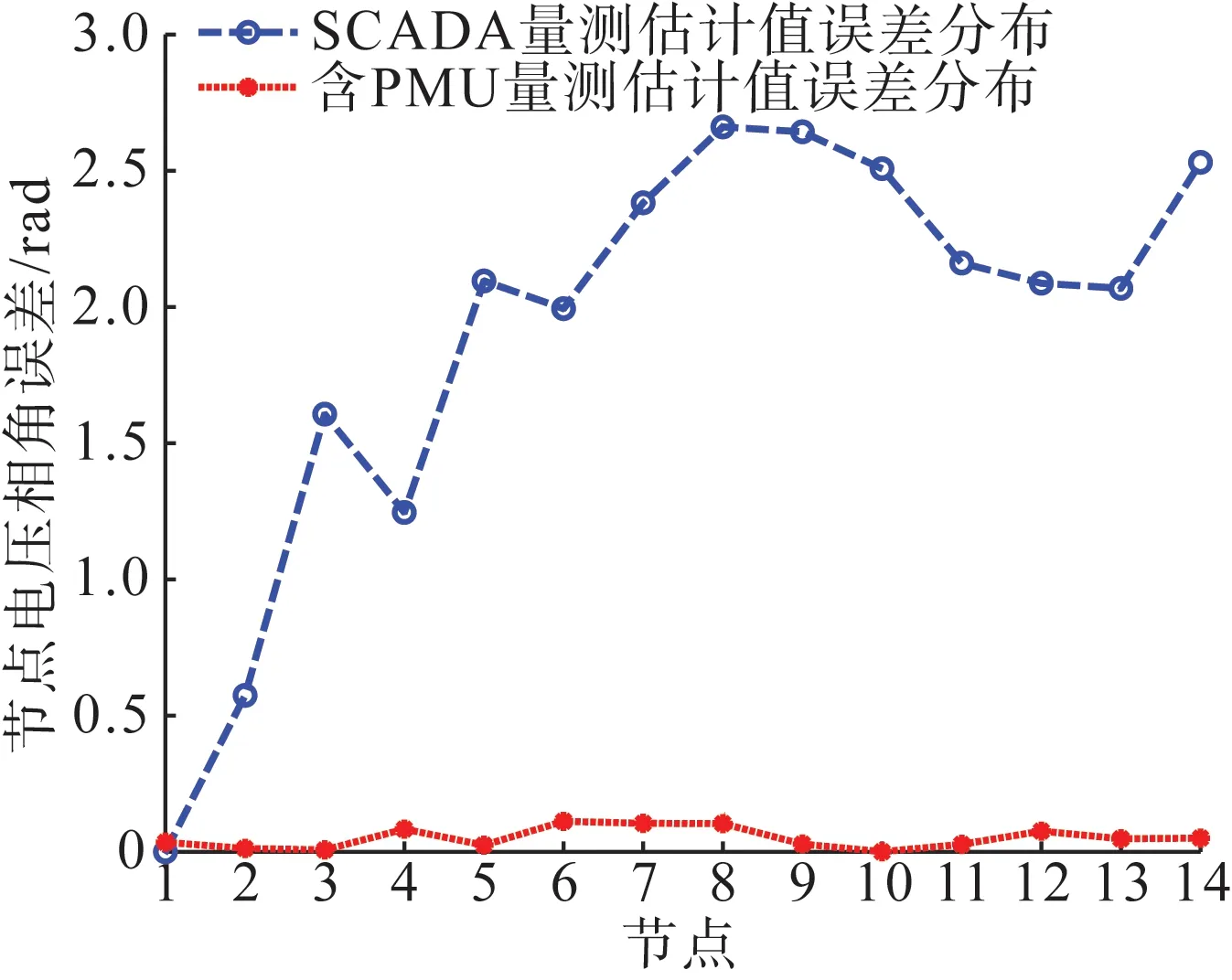
图4 节点电压相角状态估计值误差分布Fig.4 State estimation value error distribution of node voltage phase angle
本文所提估计融合体系,主要是将量测系统看成不同的传感器,对其采集的数据进行估计结果的融合。为了验证本文所提估计融合体系与集中式状态估计具有相同效果,基于广泛应用的WLS方法,对两种方式的状态估计进行仿真测试,得到图5和图6。

图5 节点电压幅值状态估计值误差分布Fig.5 State estimation value error distribution of node voltage amplitude
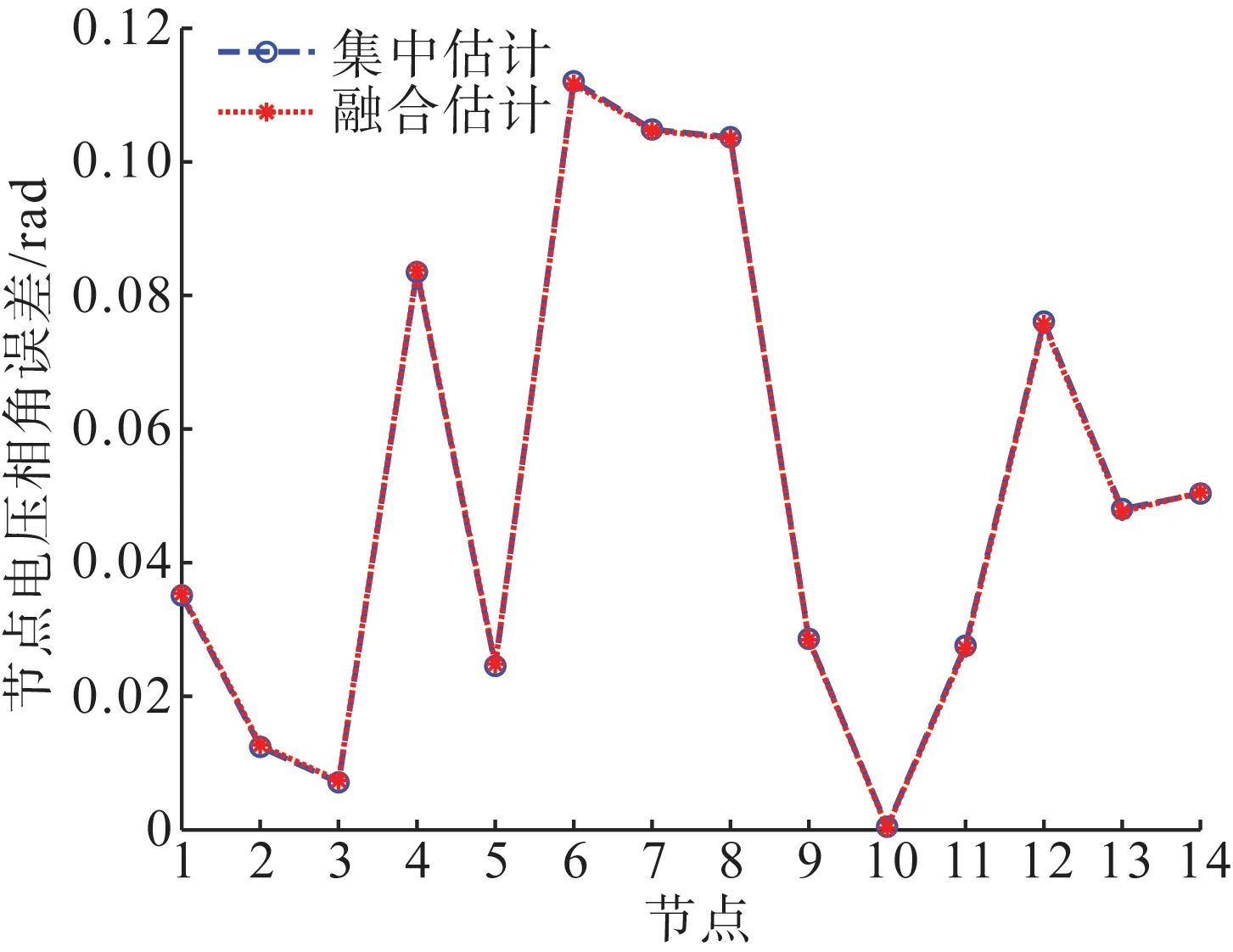
图6 节点电压相角状态估计值误差分布Fig.6 State estimation value errors distribution of node voltage phase angle
由图5和图6可以看出,采用集中式状态估计的结果与本文估计融合体系进行状态估计结果基本相同,具体指标分析如表3所示(表中数据均为标幺值,后同)。其中,ev.max为最大电压估计误差,eangle.max为最大相角估计误差,ev.min为最小电压估计误差,eangle.min为最小相角估计误差,ev.mean为平均电压估计误差,eangle.mean为平均相角估计误差,同时对计算时间进行测试。由表3中的电压幅值和相角数据指标以及两种估计方式所需时间的对比,可以验证采用本文估计融合体系进行状态估计的有效性。

表3 仿真结果误差评价Tab.3 Error evaluation of simulation results
进一步地,本文将改进的GM估计算法与估计融合体系相结合,对SCADA与PMU量测系统分别进行状态估计计算,将所得估计值进行融合。以潮流结果为真值,与WLS方法进行对比,得到节点电压幅值与相角分布,结果如图7和图8所示。
图7结果表明本文方法在节点电压幅值上较WLS法更精确些。而由图7和图8可知,采用本文方法进行状态估计,能较精确地得到节点电压幅值与相角结果。在拓扑结构较为简单的网络,基于估计融合体系,两种方法都能满足快速响应特性要求,进一步验证了本文方法的可靠性。

图7 电压幅值状态估计值分布Fig.7 State estimation values distribution of voltage amplitude
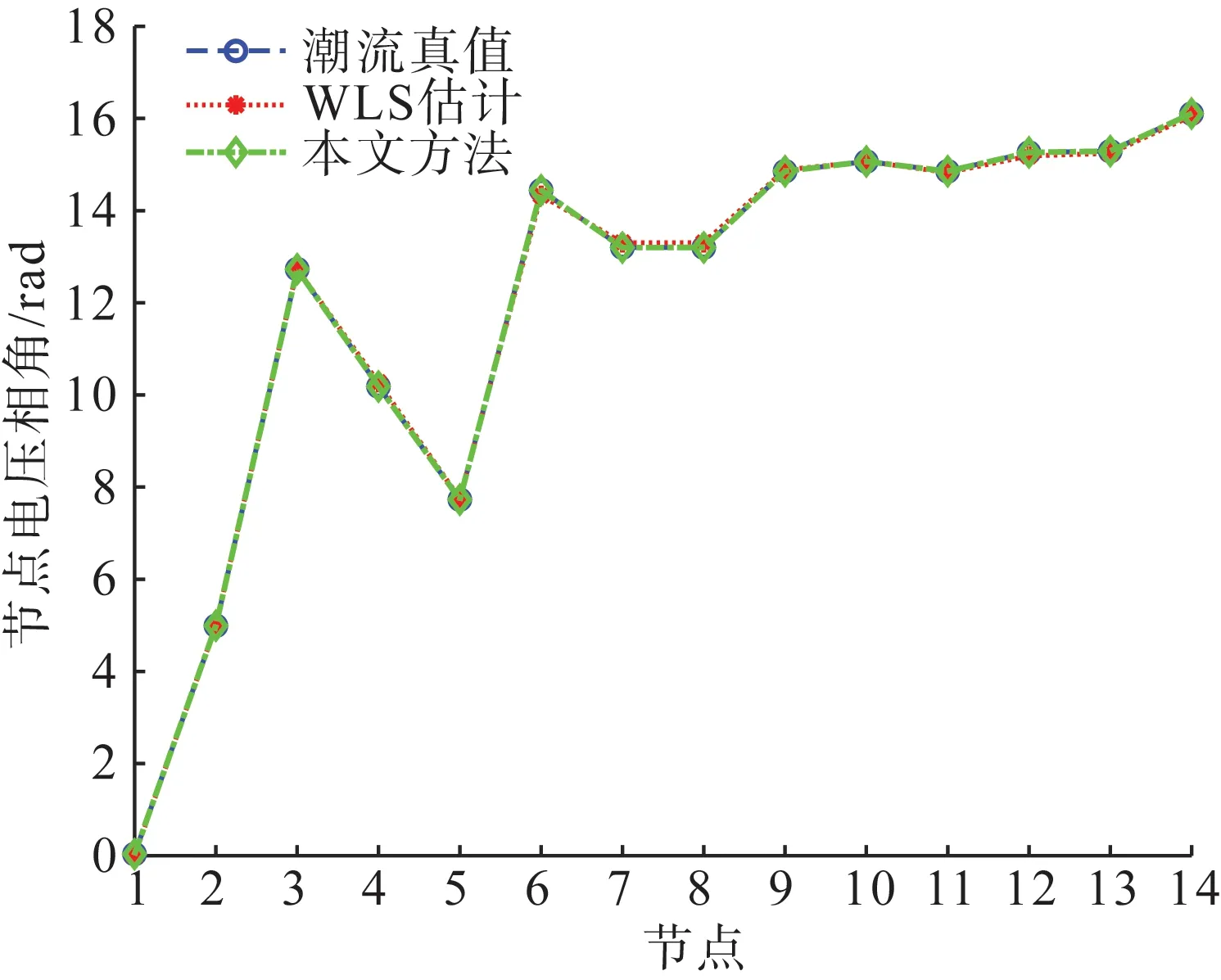
图8 电压相角状态估计值分布Fig.8 State estimation values distribution of voltage phase angle
考虑到不同PMU配置情景对所提估计融合体系结合改进GM估计算法的影响。采用0-1整数规划算法,在满足可观性条件下多次运行选取3种配置方案进行分析,评价结果如表4所示。

表4 PMU配置对状态估计算法性能评价Tab.4 Performance evaluation of PMU configuration on state estimation algorithm
由表4可知,不同PMU配置方案下电压幅值与相角绝对误差的平均误差与最大误差都较为接近,结果表明在拓扑结构较为简单的网络,PMU配置情景不同对本文所提方法影响较小。
3.2 改进IEEE 33节点仿真分析
为了进一步验证本文所提改进GM估计与估计融合体系相结合方法在拓扑结构较为复杂的网络中的性能表现,采用图9所示的改进IEEE 33节点配电网络进行仿真分析,其中节点5采用W1参数设置,23和32采用W2参数设置;节点3、14采用PV1参数设置,节点10、18采用PV2参数设置。在节点3、6、14、19、29、32配置PMU。仿真情境、量测量及相应误差设置沿用前文设置。

图9 改进IEEE 33节点配电网络Fig.9 Improved IEEE 33-node distribution network
3.2.1 仿真分析
采用改进GM估计法分别对SCADA量测与含PMU量测进行仿真测试,在潮流真值的基础上对状态估计结果进行误差分析,得到表5。从表5中的数据可以看出,含PMU量测的估计结果在平均误差与最大误差方面都优于SCADA量测估计结果,证明了高精度的PMU量测数据能带来更好的状态估计结果。

表5 仿真结果误差评价Tab.5 Errors evaluation of simulation results
利用本文所用的估计融合体系与集中式状态估计在改进IEEE 33节点配电网上进行仿真测试,以验证估计融合体系的有效性。在潮流真值的基础上,运用WLS方法估计得到节点电压幅值与相角绝对误差分布。表6为两种方法估计结果精度以及计算时间的对比。由表6中数据可以看出,在拓扑结构较为复杂的网络中,采用估计融合体系进行状态估计同样能够得到与集中式状态估计相同的效果,并没有降低估计器的性能,满足有效性与可靠性的要求。
同样地,利用估计融合体系,分别与改进GM估计法、WLS方法相结合,在改进IEEE 33节点上进行仿真测试,得到网络节点电压幅值与相角,如图10和图11所示。

表6 仿真结果误差评价Tab.6 Errors evaluation of simulation results
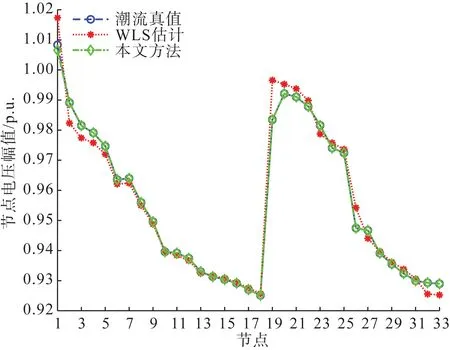
图10 电压幅值状态估计值分布Fig.10 State estimation value distribution of voltage amplitude

图11 电压相角状态估计值分布Fig.11 State estimation value distribution of voltage phase angle
由图10和图11可以看出,在拓扑结构较为复杂的IEEE 33节点网络上进行两种方法的仿真对比,WLS方法较潮流真值在估计结果上有一定的波动范围,而本文方法有较好的估计效果。表7列出了两种方法在不同节点系统下的计算时间。可见随着网络结构复杂性的提高,在计算时间上略有增加,但所得估计结果仍具有鲁棒性,进一步验证了本文改进GM估计与估计融合体系相结合方法的有效可行性。在改进IEEE 33节点网络上考虑不同PMU配置情景对估计结果的影响,选取3种配置方案进行分析,评价结果如表8所示。

表7 两种算法时间比较Tab.7 Comparison of two algorithms’ times
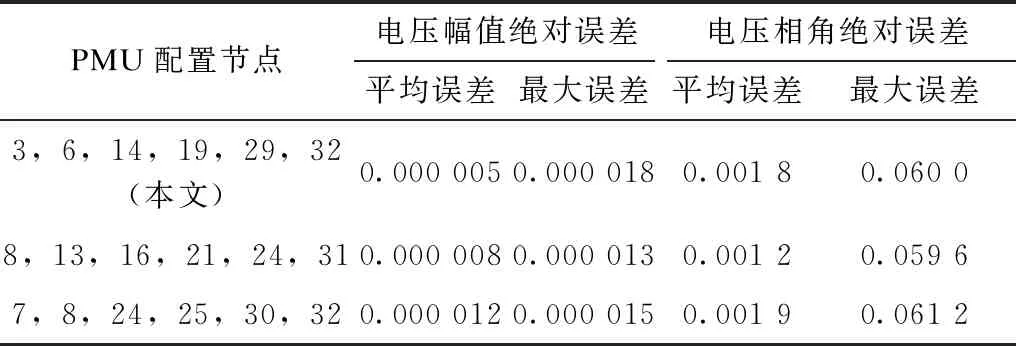
表8 PMU配置对状态估计算法性能评价Tab.8 Performance evaluation of PMU configuration on state estimation algorithm
由表8可知,随着网络结构复杂性的提高,不同PMU配置方案下状态估计结果误差相差不大,进一步也证明了本文所提估计融合体系与改进GM估计方法的有效性与可靠性。
4 结论
本文将改进GM估计与估计融合体系相结合,通过不同估计模块处理SCADA量测和PMU量测,避免了现有能量管理系统软件的重大更改,也能充分利用高精度PMU量测。通过对改进IEEE 14与IEEE 33节点配电网络的仿真分析得出如下结论。
1) 高精度PMU量测对状态估计具有一定的影响,将其与SCADA量测共同用于配电网状态估计中可有效改善估计结果的精度。
2) 本文所采用的估计融合体系与集中式状态估计具有相同的估计性能,进一步证明了所提策略是有效可行的。
3) 基于估计融合体系,分别与改进GM估计、WLS方法相结合在不同的配电网上进行仿真测试,并对不同PMU配置情景进行分析,结果表明本文所提策略的有效性与可靠性。
本文通过案例证明了改进GM估计与估计融合体系相结合方法进行配电网状态估计的有效性和合理性,而在实际配电网中三相不平衡的场景较为普遍,后续将开展相关研究,并对本文进行补充完善。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
振动与冲击(2022年10期)2022-05-30
电子制作(2019年16期)2019-09-27
新高考·高一数学(2019年4期)2019-09-07
活力(2019年22期)2019-03-16
电子制作(2018年8期)2018-06-26
电子制作(2018年1期)2018-04-04
电子制作(2017年7期)2017-06-05
江苏农业科学(2016年5期)2016-07-23
