基于平面基线靶标的航空摄影测量重定位
2022-07-08 11:46康亚辉周博闻
西安工程大学学报 2022年3期
李 博,康亚辉,2,周博闻,3
(1.河南省地质矿产勘查开发局 第三地质矿产调查院,河南 信阳 464099;2.郑州轻工业大学 计算机与通信工程学院,河南 郑州 450002;3.郑州升达经贸管理学院 信息工程学院,河南 郑州 451191)
0 引 言
我国幅员辽阔,在地形多变、地质条件复杂的地区进行地质勘察时,利用航空摄影技术完成图像采集可极大促进地质勘察的工作效率和工作质量,为后期地质工程的开展奠定基础[1-2]。
航空摄像测量采用航空摄像仪获取地面照片,同时结合地面测量点以及平面测绘等方式,共同完成地形绘制以及物体定位等工作,是目前获取地质相关数据的重要手段,被广泛应用于土地测绘、地质勘察、建筑工程以及水利工程等诸多领域,因此,对航空摄影测量数据进行研究具有非常重要的现实意义[3-4]。然而在一些实物测量过程中,由于实物尺寸与摄像机行程存在不匹配或是无法获取实物反面信息等问题,只能通过设立不同的定位位置来分段、分片测量物体,这就导致某一物体的各片段数据处于不同的坐标系,因此需要将这些数据进行重定位,使其处于同一坐标系便于统一计算和处理[5-6]。
科技工作者针对航空摄影测量数据重定位相关问题,研究出诸多的研究成果。胡丙华等以航空摄影测量控制定位理论为基础,利用传感器以及地面控制等技术,计算并对比飞机姿态相关参数,对飞机惯导姿态的数据精度进行评估,并通过实验验证了该方法能够合理完成精度评估[7];李海滨等探讨了航空摄影测量技术的发展,梳理了相关数学理论及方法,并引入云计算等技术以提高航空摄影测量的智能化程度[8];高晓等研究航空摄影测量中的无人机定位问题,采用平滑伪距与相位观测量相结合的方法进行无人机定位数据处理,取得了较高的定位精度[9]。这些方法虽然精确度较高,但均存在损耗功率高、耗时长等问题。林贞涛等提出了一种新的摄像机标定方法,采用虚拟标靶的形式通过显示器展示图像位置和姿态等信息,为摄像机内部参数调整奠定基础,然后结合内部参数调整完成摄像机标定[10]。该方法虽然耗时较短,但测量的精度较低。
以现有研究成果为基础,为进一步提高航空摄影测量精度,本文建立统一的航空摄影坐标系,完成数据的坐标转换,科学利用平面极限靶标可进行数据的重定位,从而给出一种基于平面基线靶标的航空摄影测量数据重定位方法。经实验证明本文方法可提高定位精度和定位效率,降低运行功耗。
1 平面基线靶标摄影测量结构图
平面基线靶标加工过程相对容易,可移动性较强,且具有较好的成像效果,因此本文基于平面基线靶标进行航空摄像测量数据重定位分析[11-12],设计了一种平面基线靶标。在平面基线靶标中均匀布置了9个特征点(黑方点),形成相互平行的3行3列,如图1所示。
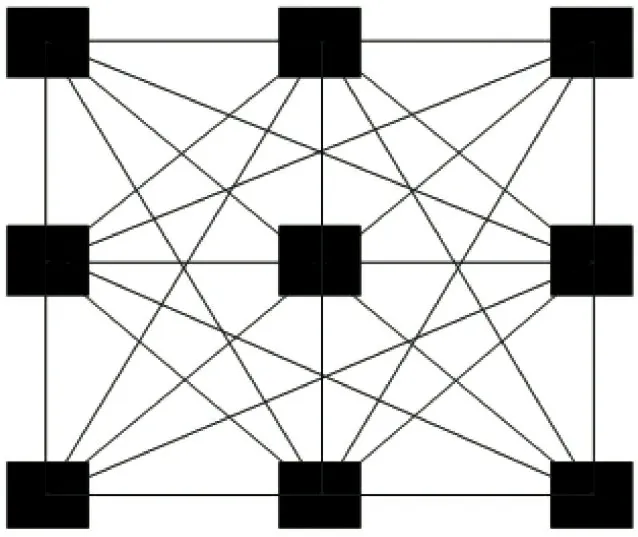
图 1 平面基线靶标Fig.1 Plane baseline target
图1中,若仅仅以上述9个特征点为标定点,标定点数量过少,容易导致摄像产生误差,影响摄像精度。因此本文以几何空间约束为基础,将任意点之间相连构建n条直线,增加平面基线靶标中的特征点,以降低摄像误差[13-14]。
计算机视觉发展过程中,单目视觉视野受到一定约束,为提高航空摄像测量精度,使用双目视觉测量方法获取事物各子区域数据[15-16],构建航空摄像测量结构图。将平面基线靶标放置于2组双目视觉测量系统中间,以靶标的中心点为原点建立空间坐标系xyz,如图2所示。

图 2 航空摄像测量结构Fig.2 Aerial camera measurement structure
2 航空摄影测量数据重定位
2.1 航空摄影坐标系描述
航空摄像测量数据重定位的实质是摄像机坐标系和世界坐标系转换分析,通过2个坐标系转换,使物体各子区域数据处于同一坐标系中便于计算,进而获取物体表面完整信息[17-18]。图3为摄像机坐标系和世界坐标系。

图 3 摄像机坐标系和世界坐标系Fig.3 Camera coordinate system and world coordinate system
图3中,摄像机坐标系的原点位于点o,摄像机光轴为z,与摄像平面形成垂直关系,x和y分别为横纵坐标,则o-xyz则为摄像机坐标系[19-20]。摄像平面中的点F为测量物体,相交于光轴z上,并与x和y建立平行横纵坐标。O-XYZ为世界坐标系,该坐标系能够体现摄像机坐标,同时对拍摄场景中的任意物体进行表示。
2.2 测量数据重定位实现过程
当航空摄像测量结构图测量某一物体时,将单个摄像机分别放置于M个位置进行测量,摄像机使用摄影坐标系。摄像机首先放置于位置1测量物体,测量完成之后在位置1附近放置平面基线靶标,拍摄靶标图像,获取靶标上的特征点。然后固定靶标位置不动,摄像机移动至位置2拍摄靶标,靶标拍摄完成移走后,再使用摄像机拍摄该物体表面区域。以此方式直至拍摄得到该物体表面所有位置点数据,从而获取各子区域测量数据[21-22]。
根据摄像机在位置1和位置2处获取的靶标特征点,建立函数求解坐标系转换矢量,构建转换矩阵。以位置1的坐标系为世界坐标系,使用变换矩阵分别求取每个位置点的坐标,最终汇总至世界坐标系中,完成该物体的航空摄影测量数据重定位。坐标系转换计算过程如下所示。
摄像机坐标系矢量表示为A=(x1,y1,z1,1),世界坐标系矢量表示为B=(X,Y,Z,1),则2个坐标系转换过程可表示为

(1)
式中:C为坐标系转换矩阵;S为旋转矩阵,S=[p]-1[q],p、q为坐标基准点构成的正交矢量;R为平移矩阵,R=mi-ni[p]-1[q],mi为世界坐标系的某一位置点取值,ni为摄像机坐标系的某一位置点取值。
根据式(1)得出航空摄影测量数据重定位变换最终表达式为
B=mi[p]-1[q]-mi[p]-1[q]+ni
(2)
2.3 误差分析
上述分析完成航空摄影测量数据重定位,该分析将坐标转换看作一种刚性转换,主要考虑被测物体发生的平移和旋转,但实际航空摄影测量某一物体时,由于摄像角度或者外界因素的动态变化,会导致被测物体发生形状转换变化,因此有可能会产生测量误差[23-24]。为获取更准确的航空摄影测量数据重定位效果,本文采用最小二乘法对测量误差进行处理[25-26]。主要过程如下所示。
1) 建立最小二乘目标函数:
(3)
式中:α为测量误差。
2) 寻找使最小二乘目标函数T最小的旋转变换矩阵。
3) 基于旋转变换矩阵计算平移变换矩阵。
4) 综合考虑旋转变换矩阵和平移变换矩阵,最小化测量误差。
通过上述过程,实现基于平面基线靶标的航空摄影测量数据重定位。
3 结果与分析
为验证本文航空摄影测量数据重定位方法的有效性,采用Windows XP操作系统,在开发平台Visual Studio 2008中进行实验测试,开发语言使用C#。显卡为NVIDIA GeForce GT240,CPU为Intel i3,内存为16 GiB。
航空摄影系统通常采用数码相机为主要图像数据采集设备,本实验采用2个CCD摄像机获取测量图像。摄像机像面尺寸像素为768×576。
在实际航拍过程中,拍摄区域可能出现面积较大的现象,超出拍摄范围,因此为提高航空摄影测量数据重定位精度,本实验根据航带图数据属性进行畸形影像过滤。此外,为进一步保证测量精度,平面靶标基准点的位置经过了反复测量与校准,且在同一测试环境中完成测量。
以重定位误差为指标,通过设置不同的平面基线靶标圆心距离,测量本文方法的摄像机坐标系和世界坐标系位置数据,计算测量误差,统计结果见表1。

表 1 测量误差分析
从表1可以看出,世界坐标系的整体测量误差大于摄像机坐标系,但在不同平面基线靶标圆心距离下,本文的整体测量误差值都较小,摄像机坐标系下测量误差低至0.01 mm。表明本文利用最小二乘法对测量误差进行处理获取较好成效,提高了航空摄影测量数据重定位精度。
为充分验证本文重定位方法的高效性,以重定位功耗为指标,测试本文方法与文献[7]、文献[8]和文献[9]方法,功耗对比结果如图4所示。

图 4 功耗对比结果Fig.4 Comparison results of power consumption
从图4可以看出,本文方法的功耗最低,在65~75 W之间,文献[9]方法的功耗最高,在140~185 W之间。与文献[7]、[8]和[9]方法相比,本文方法具有显著优势,能显著降低运行功耗,验证了所提方法的高效性。
对比分析本文方法与文献[7]、[8]和[9]方法的重定位耗时,不同方法耗时结果见表2。

表 2 不同方法耗时对比
从表2可以看出,文献[8]方法的平均耗时高达24.5 s,其次是文献[9],该方法平均耗时为19.3 s,文献[7]的平均耗时为12.7 s,而本文方法的平均耗时仅为8.5 s,相较于其他文献方法具有显著优势,由此进一步证明了本文所提重定位方法的高效性。
4 结 语
数据重定位是视觉测量领域的一种重要技术,在多个领域被广泛应用,并取得了较好成效。结合视觉测量技术在航空摄影方面的应用,本文提出一种基于平面基线靶标的航空摄影测量数据重定位方法。通过坐标系转换实现了测量数据重定位,为避免被测数据因形变等问题影响测量精度,进一步对测量误差进行分析,提高航空摄影测量数据重定位精度。实验验证表明,所提方法测量误差较小,其误差低至0.01 mm,远远小于对比方法,且运行功耗低、耗时短。本文方法为视觉测量发展提供了有效支持,促进我国地理勘察行业的发展。
猜你喜欢
今日农业(2022年4期)2022-11-16
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-16
测绘地理信息(2022年3期)2022-06-05
福建中医药(2022年2期)2022-03-24
北京大学学报(自然科学版)(2022年1期)2022-02-21
理论与创新(2020年14期)2020-09-22
师道·教研(2019年7期)2019-08-13
航空知识(2019年1期)2019-01-11
科技创新与应用(2017年5期)2017-03-16