
基于机器视觉的微电机摩擦片残缺检测*
2022-07-04 12:08:40李玉萍谢俊王子贤赵宇凡杨启志
制造技术与机床 2022年7期
李玉萍 谢俊 王子贤 赵宇凡 杨启志
(①江苏大学机械工程学院,江苏 镇江 212013;②江苏大学农业装备工程学院,江苏 镇江 212013)
微电机是指直径小于160 mm或额定功率小于750 W的微型电动机[1],常用于控制系统或传动机械负载中,用于机械能与电能的相互转换,实现能量转换、动力输出、执行等功能[2]。在微电机中,摩擦片常用于轴向固定齿轮,防止齿轮窜动,若摩擦片残缺,会导致齿轮受力不均,引起变形,最终影响微电机的动力输出。
目前,在电机行业,基于机器视觉的电机检测研究主要局限于电机外壳的二维尺寸和缺陷、电机转子缺陷、电机换向器缺陷,对于微电机摩擦片的缺陷检测还未有针对性研究,仍以人工检测为主。
由于微电机中的摩擦片尺寸小,仅在8 mm左右,采用人工检测容易产生视觉疲劳,导致误检,并且效率低下,不利于自动化生产需求[3]。故而引入非接触式检测的机器视觉技术,提出一种基于机器视觉的微电机摩擦片残缺检测系统,可大幅度降低人力成本,提高检测效率与精度,有利于企业朝智能化、自动化以及柔性化方向发展。
1 视觉检测平台设计
摩擦片的缺陷主要是残缺,如图1所示,像划痕等类似缺陷对摩擦片的性能并无影响,故只检测摩擦片是否残缺,要求误检率不高于2%。

图1 摩擦片残缺
由于摩擦片尺寸较小,直径在8 mm左右,需要较高的图像质量,因此采用500万像素的德国BASLER黑白CCD相机,其型号为acA2500-14gm。镜头选择景深大畸变小的远心镜头,可消除近大远小的透视误差[4]。
由于红色LED的波长更接近于CCD图像传感器的灵敏度峰值,CCD对红光敏感程度强,并且对微电机摩擦片的颜色选择无特殊要求,所以LED的颜色选用红色。环形光源能突出物体的三维信息[5],适合检测缺陷,因此,最终选用红色环形光源。
本文搭建的视觉检测平台如图2所示,相机与环形光源安装在待检零件的同侧,并垂直向下安装。
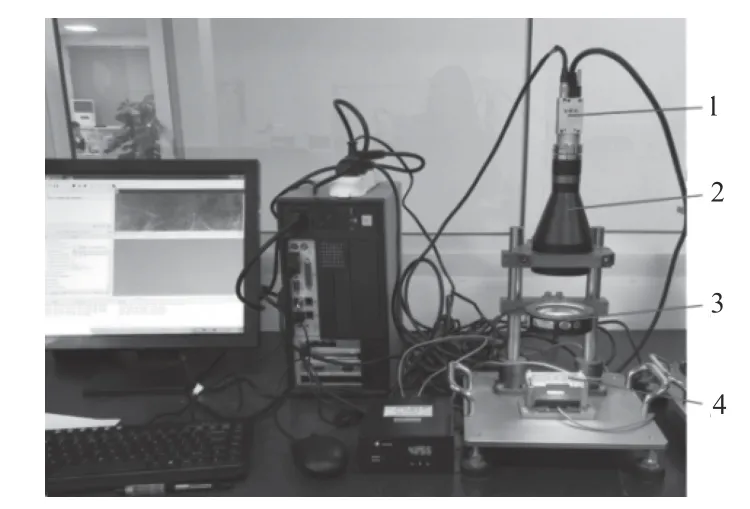
图2 实验平台实物图
2 图像预处理
由于图像比较复杂,存在许多不感兴趣区域,因此需要对图像进行预处理,以提取到摩擦片区域,这样能够有效避免不感兴趣区域影响目标区域,提高检测精度,有利于后续的摩擦片轮廓提取。
2.1 图像二值化
相机采集得到的灰度图像如图3所示。图像二值化是将感兴趣区域与背景分离,可以压缩图像数据量,减少存储空间,并且简化后续图像处理步骤。

图3 灰度图像
本文对灰度图像进行二值化是基于阈值分割。由于摩擦片边界上的像素点的灰度值在47~101,邻近边界两侧的像素点的灰度值均高于128,通过灰度值“128”可将摩擦片边界上的像素点与其他像素点分割开。因此,确定本检测的阈值为“128”,对灰度图像进行反向二值化,将灰度值小于“128”的像素点的灰度值设为“255”(白色),其余像素点的灰度值设为“0”(黑色),二值化结果如图4所示,目标以白色显示,背景以黑色显示。
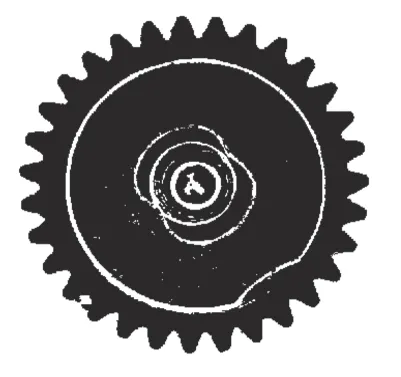
图4 二值图像
2.2 目标区域提取
本文对二值图像进行连通操作,将邻域内的八连通区域归为一个区域,即对每一个值为1的像素点,若其8邻域有一个像素点的值也为1,那么这两个像素点就归为一个区域,连通区域标记后的结果如图5所示。
最小外接矩形[6]包含丰富的特征信息,比如长轴、短轴和主轴方向角度等,是检测目标特征几何形状的有效工具,从图5中可以看出各区域的最小外接矩形的长轴存在很大的差异,因此根据最小外接矩形的长轴来提取摩擦片边界区域,最终结果如图6所示。
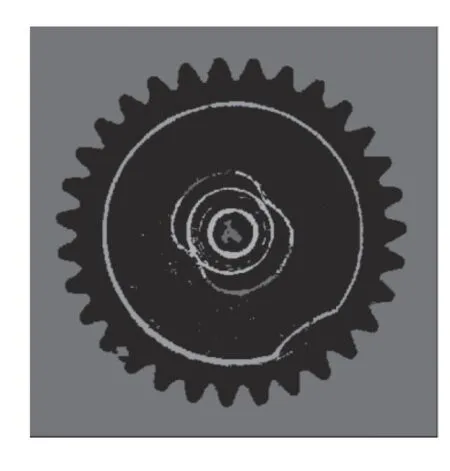
图5 连通区域标记结果
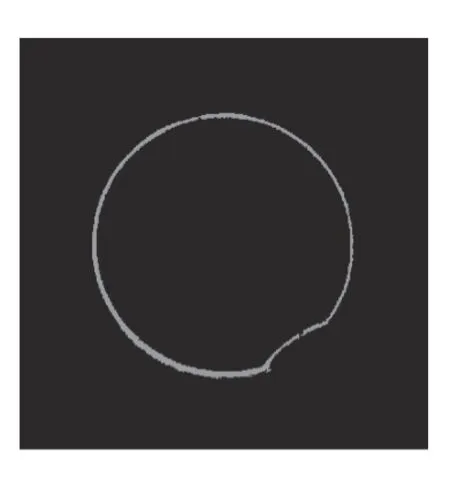
图6 摩擦片边界区域
2.3 形态学运算
由于摩擦片的边界存在缝隙,需要进行形态学运算,常用的方法有膨胀与闭运算。
膨胀运算是求局部最大值[7],膨胀运算使目标区域范围变大,边界向外部扩张,效果如图7所示。闭运算是先膨胀后腐蚀,常用于连接邻近物体、填充物体内细小孔洞、消除边界较窄缝隙、平滑物体边界的同时并不明显改变其面积与位置[8],闭运算效果如图8所示。根据膨胀与闭运算的效果图,选用闭运算填补缝隙。
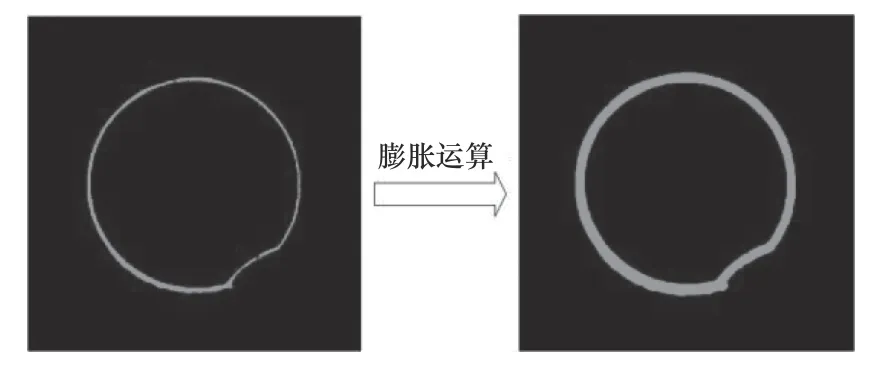
图7 膨胀运算效果图
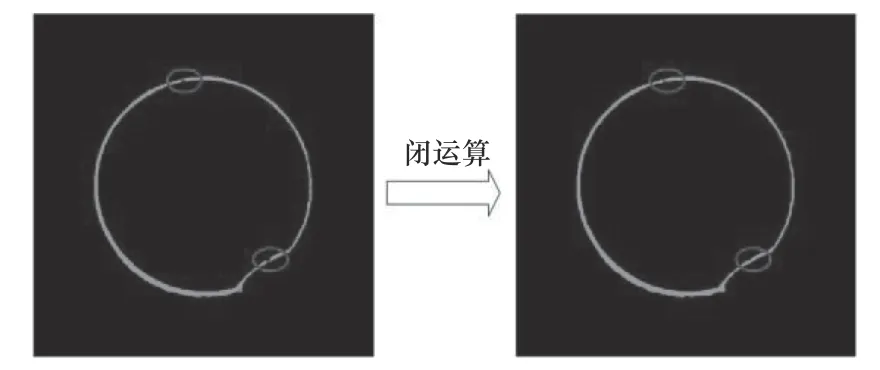
图8 闭运算效果图
2.4 摩擦片轮廓提取
将闭运算后的摩擦片边界区域转为亚像素轮廓,结果如图9所示,并将亚像素轮廓在原图上显示,如图10所示,可以发现内侧的绿色轮廓才是真正的摩擦片轮廓,因此选择绿色轮廓作为摩擦片轮廓,最终提取出的摩擦片轮廓如图11所示。

图9 亚像素轮廓图

图10 原图上显示亚像素轮廓
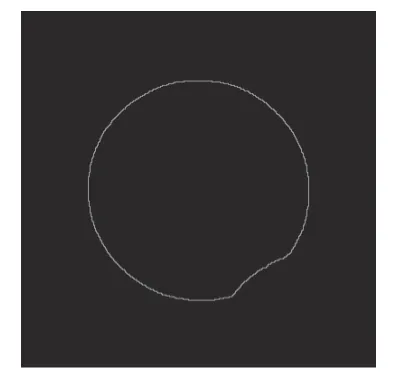
图11 摩擦片轮廓
3 提取摩擦片圆心与半径
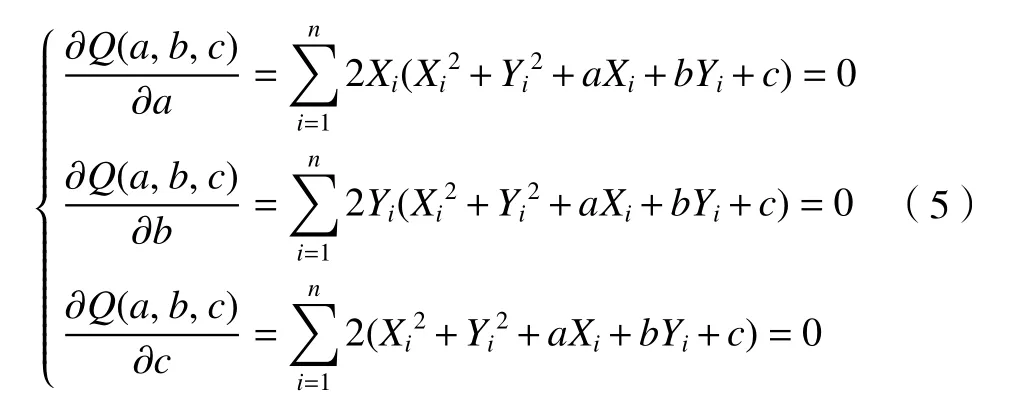
3.1 最小二乘法拟合圆
常用的圆拟合方法有最小二乘法与霍夫变换,本文基于最小二乘法进行圆拟合。最小二乘法是使轮廓上的点到拟合圆的平方距离和最小[9],也就是要求拟合出来的圆与轮廓上的每个点最近。假设最小二乘法拟合得到的圆为

令a=−2A,b=−2B,c=A2+B2−R2得到圆方程的另一种形式。

样本集为摩擦片轮廓的像素点,设为(Xi,Yi),i∈(1,2,3,···,n),如图12所示,点(Xi,Yi)到圆心(A,B)的距离为di
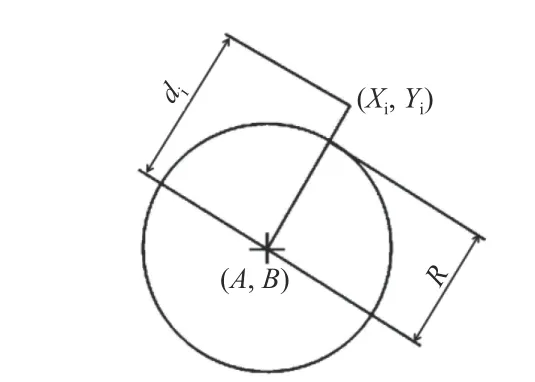
图12 样本点与拟合圆的关系

样本点(Xi,Yi)到圆心(A,B)距离的平方与圆半径R的平方的差为误差δi

3.2 改进的最小二乘法拟合圆
如图13所示,绿色轮廓为原始轮廓,红色轮廓为最小二乘法的拟合结果,因此可以看出采用标准的最小二乘法拟合圆时,对于离群值不够鲁棒的,拟合结果不够准确,所以需要采用合适的方法减小离群点的影响。本文引入权重来减小离群值的影响。
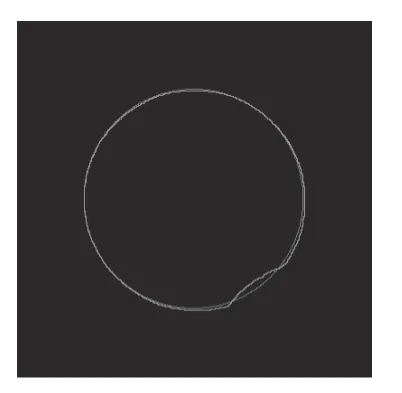
图13 最小二乘法拟合结果
权重可以理解为:轮廓点距离拟合的圆越远,赋予点越小的权重,甚至将这些点忽略掉,不参与下一次最小二乘法的计算。第一次计算时,可以赋予每个点相同的权重,进行第一次圆拟合后,再计算各点到圆的距离,距离圆远的点赋予较小的权重,这样可以减小离群点的影响,得到较为准确的圆方程,按照这种方法进行多次迭代,可获得理想的圆。
通过Tukey权重函数,如式(6)所示。
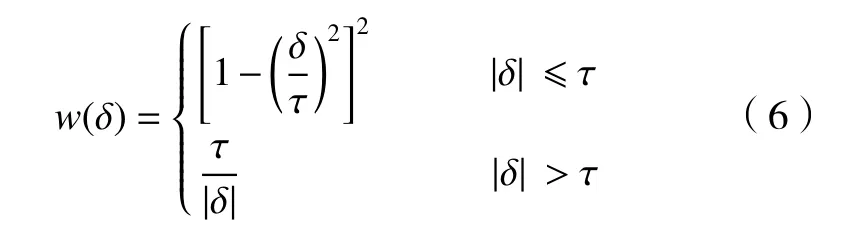
当点到圆心的距离与半径的差值 δ小于等于阈值 τ时,赋予这些点的权重为,这样δ 越小,权重越大;当点到圆心的距离δ 大于阈值 τ时,赋予的权重为。如图14所示,经改进后,圆拟合结果更为准确。
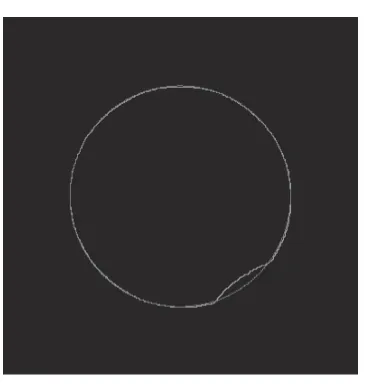
图14 改进的最小二乘法拟合结果
4 摩擦片残缺检测结果分析
残缺检测的实现是通过对轮廓上像素点到圆心的距离进行分析。如图15所示,计算轮廓上所有的像素点到圆心的距离di,然后求出最小距离dmin,将最小距离dmin与半径进行比较。考虑到零件在加工过程中存在工艺误差,加工出来的摩擦片并不是标准圆,因此,圆轮廓上每个像素点到圆心的距离不是一个定值,而是存在一定的波动。通过对数张合格的摩擦片图像进行统计,发现圆轮廓上的像素点到圆心的距离的波动小于5像素,因此本文设定阈值T=5,即允许有5像素的误差,若R−dmin≤T,则摩擦片合格;若R−dmin>T,则摩擦片残缺。

图15 残缺检测实现过程
最终,检测结果如图16所示。为验证本视觉检测系统的准确性,检测了50个合格品与50个不良品,其中,合格品检测的准确率为100%,不良品的准确率为98%,达到了预期要求,具体检测数据见表1。
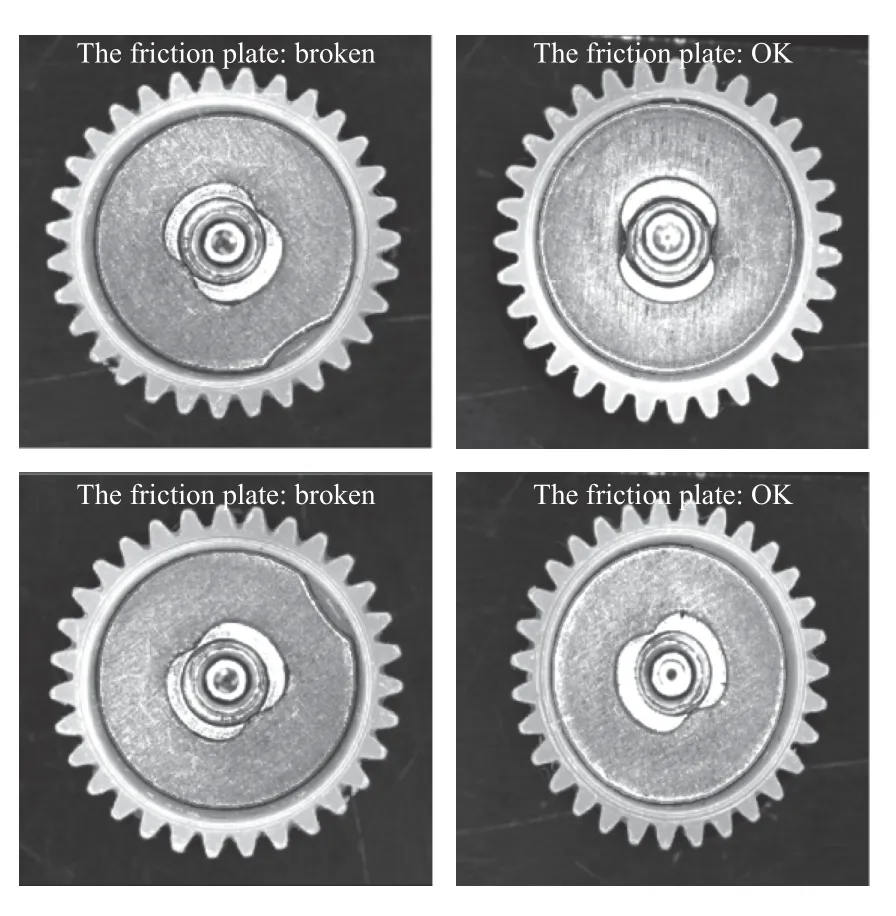
图16 摩擦片检测结果

表1 摩擦片残缺检测实验统计结果
5 结语
本文采用500万像素的CCD相机、远心镜头、红色环形光源搭建了微电机摩擦片的视觉检测平台,研究了摩擦片残缺检测算法。通过引入Tukey权重函数,对最小二乘法进行改进,将距拟合圆越远的像素点赋予越小的权重,可减小离群像素点对圆拟合精度的影响,能有效提高圆拟合的精度。
本文还提出一种圆残缺检测算法,经改进的最小二乘法得到拟合圆的圆心与半径,计算轮廓上所有的像素点到拟合圆心的距离,从中找出最小距离,将拟合圆的半径与其做差,若差值小于等于设定的阈值,则摩擦片完整,否则摩擦片残缺。经过试验,该检测算法的准确率达到了98%。
本文通过机器视觉技术对微电机摩擦片进行残缺检测,弥补了传统人工检测效率低、成本高等不足,有利于企业朝自动化、智能化检测方向发展,增强综合竞争力。
猜你喜欢
福建中学数学(2023年5期)2024-01-25 17:41:36
装备制造技术(2021年4期)2021-08-05 07:39:22
机械设计与制造(2020年6期)2020-06-20 03:36:12
中等数学(2018年1期)2018-08-01 06:41:04
电脑知识与技术(2018年35期)2018-02-27 13:29:44
汽车零部件(2017年2期)2017-04-07 06:41:52
自动化学报(2017年11期)2017-04-04 02:52:44
汽车维护与修理(2016年1期)2016-11-27 09:36:38
电视技术(2014年11期)2014-12-02 02:43:28
数学大世界·初中生辅导版(2010年2期)2010-03-08 01:47:46
