
基于自然驾驶数据的城市交叉口纵向驾驶特征分析*
2022-07-02 09:44朱西产
汽车工程 2022年6期
袁 田,赵 轩,刘 瑞,余 强,朱西产,王 姝
(1.长安大学汽车学院,西安 710064;2.同济大学汽车学院,上海 201804)
前言
高级驾驶辅助系统正处于不断发展的过程中,这类技术广泛应用的一个必要条件是在确保行驶安全性的基础上,同时关注驾驶人的接受度和信任度。当驾驶辅助系统对车辆的控制不同于驾驶人偏好的操作方式时,驾驶人就有可能与系统发生冲突,这不仅会降低驾驶人对系统的信任,还可能引发其他不可预测的风险。因此,深入理解驾驶行为并将驾驶人的共性驾驶特征融入车辆的决策与控制中,对于提高驾驶辅助系统的安全性和接受度具有重要意义。
交叉路口是交通事故多发的复杂场景,该区域的复杂交互特性对驾驶辅助系统的类人驾驶能力提出了更高的要求,因此交叉口区域的驾驶行为研究尤为重要。反应特性是确保行驶安全、规避危险的一个重要特性,研究人员对驾驶人在不同行驶环境和驾驶条件下的反应特性进行了研究。龙岩松等开展实车驾驶实验研究了信号交叉口的车辆运行特性,其结果显示反应距离与初速度之间具有较高的关联度。Sato 等研究驾驶人跟车时的反应距离时发现,两车之间的相对距离和速度显著影响了驾驶人松开加速踏板和踩下制动踏板的位置和时间。Thapa 等评估了转弯车辆在停车标志控制交叉口的制动行为,左右转弯车辆的反应距离无显著差异,但路面潮湿和夜间驾驶使驾驶人在距离交叉口更远的地方开始做出反应。Oneyear 等建立了驾驶人在农村交叉口的制动行为模型以确定影响反应位置的因素,结果表明路面标志和闪烁的信号灯会使驾驶人增加制动距离。接近速度是反映反应特性的另一个关键方面。Wu 等研究右转驾驶人的驾驶行为时发现,接近速度受到信号灯状态、车辆类型和冲突车流量的显著影响。Berndt 等调查了红灯阶段的接近速度,驾驶人跟随前车接近交叉口时速度更低。
驾驶人在不同行驶环境和驾驶条件下接近交叉口的制动特性也得到了一定研究。El-Shawarby等研究了黄色信号灯期间的制动特性,驾驶人的平均减速度随着黄灯触发时到交叉口的时间的减少而增加,随着速度的增加而增加,而制动反应时间则表现出相反的趋势。Haas 等评估了驾驶人在乡村十字路口的减速行为,其研究也证明了平均减速度和初速度之间的显著相关性,Wang等则报告初速度与初始减速度、减速时间和减速距离均有相关性,高速行驶的驾驶人有更高的初始减速度,更长的减速时间和减速距离。Bao 等使用最大减速度和制动踏板差异时间评估了驾驶人在停车标志控制交叉口的驾驶性能,结果表明这两个特征受到年龄和交叉口类型(有曲线的高碰撞路口和无曲线的低碰撞路口)的显著影响。
交叉口区域的驾驶行为受到多种因素的影响,上述研究尚不足以完全阐明驾驶人在各种交通条件下操作车辆的方式,且已有研究多是国外学者基于本国驾驶数据的驾驶行为研究,由于数据采集技术的限制,国内研究很少涉及驾驶人在城市交叉口正常行驶时的速度控制行为,而驾驶行为存在潜在的文化和地区差异,相关结论不能一概而论。因此,为了开发适用于我国交通环境的驾驶辅助系统,基于中国自然驾驶数据的驾驶行为研究具有重要意义。本文中从自然驾驶数据中提取驾驶人接近城市交叉口的驾驶行为片段,应用目标检测算法识别交通场景中的各类道路使用者,使用接近速度和反应距离表征反应特性,使用制动强度、减速水平和制动时间表征制动特性,探讨驾驶人在不同运动类型和交通密度下的反应特性差异,分析制动特性与车辆运动状态、运动类型和道路使用者之间的关系,力求进一步丰富城市交叉口的驾驶行为理论研究,并为驾驶辅助系统的开发和设计提供参考。
1 研究方法
1.1 自然驾驶数据
研究数据来自中国大型实车路试项目China-FOT,该项目由中瑞交通安全研究中心发起,沃尔沃汽车集团主导,公路科学研究院、同济大学等共同参与,于2014-2015年在上海进行,共有32名驾驶人参与了该项目,行驶环境包括高速公路和城市道路。测试车上安装数据采集系统(DAS)收集车辆运动信息以及驾驶人对踏板和转向盘的操作信息。两个前置摄像头安装在测试车外记录行驶环境,另外两个摄像头安装在测试车内捕捉驾驶人的面部表情和脚部动作,如图1 所示。本研究使用前置摄像头中的视频数据进行交通目标检测,并从CAN-BUS中提取加速踏板位置、制动主缸油压、纵向加速度、速度、里程和转向盘转角作为观测变量研究驾驶行为。

图1 数据采集系统及其附件与车辆等:(a)数据采集系统;(b)摄像头;(c)测试车;(d)视频数据
研究随机抽取了16 名驾驶人在城市道路上的自然驾驶数据,其中包括13 名男性,3 名女性,平均年龄32岁,每个驾驶人都有3年以上的驾驶经验,年行驶里程从5 000到30 000 km不等。
1.2 交通目标物识别
随着深度学习和高性能计算能力的发展,基于卷积神经网络的目标检测算法已经取得了显著成绩,如R-CNN 系列、SSD、YOLO 系列等。此类算法已经广泛应用于智能交通领域识别交通标志,检测行人和车辆。为了减少工作量,使用目标检测算法对交通场景中各类道路使用者进行识别,包括车辆、行人和骑车人。首先为每一类道路使用者建立目标标签,为了提高对交通场景的解析和表达能力,根据方向将车辆目标分为3 种类型:前方、后方和侧方。为了自动定位交叉口场景,对斑马线和信号灯进行标记和识别。目标标签和相应的描述见表1和图2。
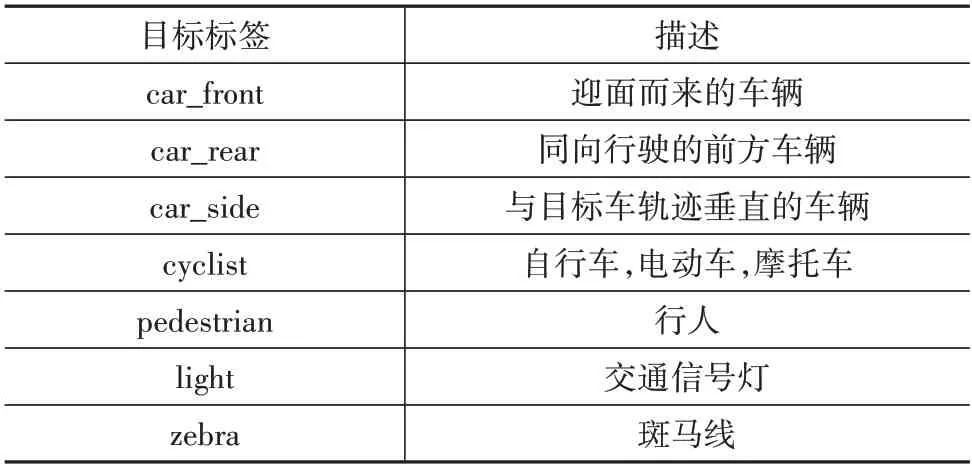
表1 目标物标签和相应的描述
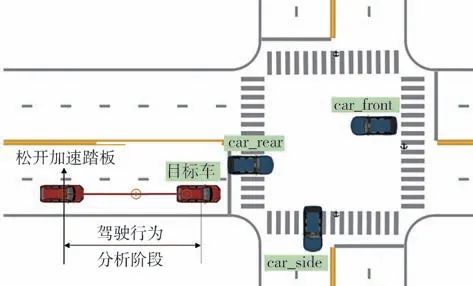
图2 车辆目标分类和驾驶行为分析阶段
选择Faster R-CNN、SSD和YOLOv4作为目标识别的候选算法。从自然驾驶数据的视频中任意截取3 300张图片,并对这些图片中的所有目标进行人工标注。然后随机选择3 000 张图片作为训练集来训练3 种算法,剩下的300 张图片作为测试集。训练和测试的平台是:i7-10700KF CPU,Nvidia RTX 2070Super GPU,32 GB内存。
上述3 种算法在China-FOT 数据集上的效果见表2。通过对比三者的识别性能和检测效率,选择YOLOv4 作为最终的目标识别算法。目标识别可视化如图3所示。
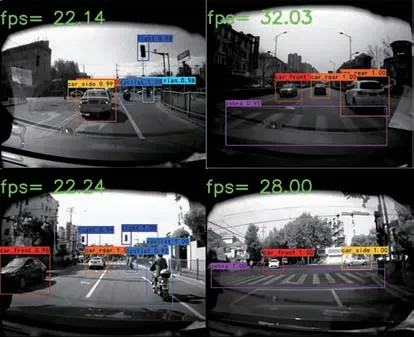
图3 目标识别可视化
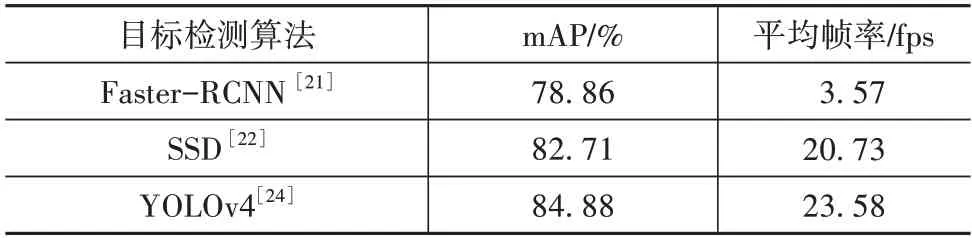
表2 目标检测算法的效果
1.3 样本提取和行为表征
提取驾驶人在自由行驶状态下接近城市交叉口的驾驶行为片段,首先根据识别的斑马线和信号灯定位交叉口场景,然后根据速度和转向盘转角获得不同运动类型的样本数据,即直行通过交叉口、交叉口前停车、左转、右转。通过查看视频数据对初步筛选的场景进行验证,在此过程中,剔除驾驶人跟随前车接近交叉口的情况和绿灯突然变红灯的情况。与此同时,记录驾驶人完全停止和到达停车线的确切时间帧。最后,基于目标车完全停止和到达停车线的时间点向前20 s 提取样本数据,以捕捉驾驶人对即将到来的交叉口的反应。
本研究使用的数据为城市实际交通中的自然驾驶数据,从获取的样本中发现驾驶人在不跟车的情况下左转通过交叉口的场景极少,因此本研究不考虑左转驾驶情况。此外,通过对获取的样本初步分析发现,仅约40%的直行样本中驾驶人采取了制动措施,49%的直行样本中驾驶人通过松开加速踏板轻微减速,11%的样本中驾驶人不减速进入交叉口,而在停车和右转的所有样本中驾驶人均采取了制动措施,因此从整体出发,最终使用了停车和右转的778个样本,其中426个样本驾驶人在交叉口制动停车,352 个样本驾驶人在交叉口右转。根据识别的同向行驶的前车(car_rear)数量,将交通密度分为低(0~2)和高(≥3)两个级别。
驾驶人的反应特性和制动特性的表征参数和表征方法如下。
(1)第1 接近速度和第1 反应距离:驾驶人松开加速踏板时的速度和停车驾驶人到停车、右转驾驶人到停车线的剩余距离。松开加速踏板的时间选为驾驶人最终对即将到来的交叉口做出反应的时间点,如图4 所示。反应距离计算为驾驶人从松开加速踏板到停车或到停车线的行驶里程。
(2)第2 接近速度和第2 反应距离:驾驶人开始制动时的速度和停车驾驶人到停车、右转驾驶人到停车线的距离。开始制动的时间选为驾驶人最初踩下制动踏板以响应即将到来的交叉口的时刻,如图4 所示。反应距离计算为驾驶人从踩下制动踏板到停车或到停车线的行驶里程。
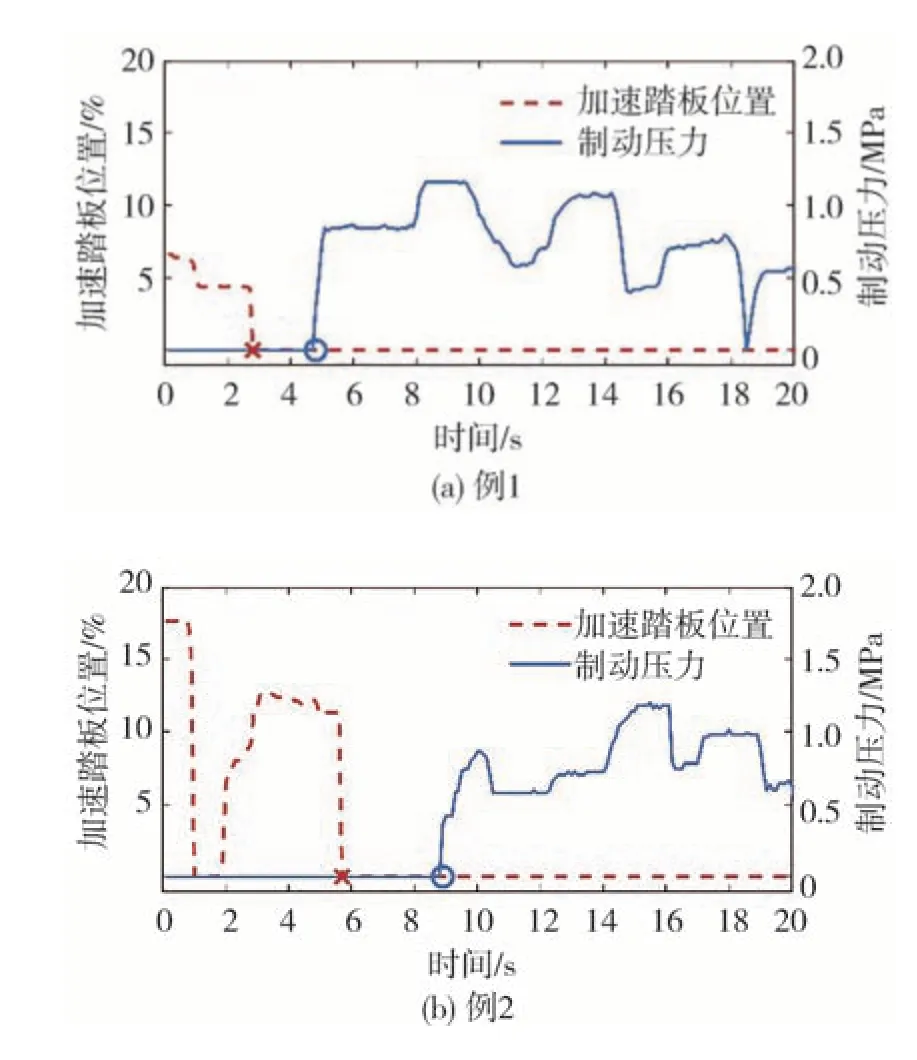
图4 驾驶人操作踏板时刻的选择方法
(3)制动过程的最大减速度,表征制动强度。
(4)制动过程的平均减速度,表征减速水平。
(5)制动时间:驾驶人从开始制动到停车或到停车线所使用的时间。
2 反应特性分析
绘制累积百分比曲线分析反应特性的分布特征。采用单因素方差分析探究反应特性在不同运动类型和交通密度中的差异,Kolmogorov-Smirnov检验用于检验样本是否满足正态分布,Levene 检验用于验证方差的齐次性。
2.1 描述统计分析
右转驾驶人的接近速度和反应距离的累积百分比均高于停车驾驶人的累积百分比,高密度交通中的接近速度和反应距离的累积百分比也都高于低密度交通,如图5 和图6 所示,这表明在右转和高密度的交通状态下,驾驶人的接近速度较低,反应距离较短,描述统计结果见表3。
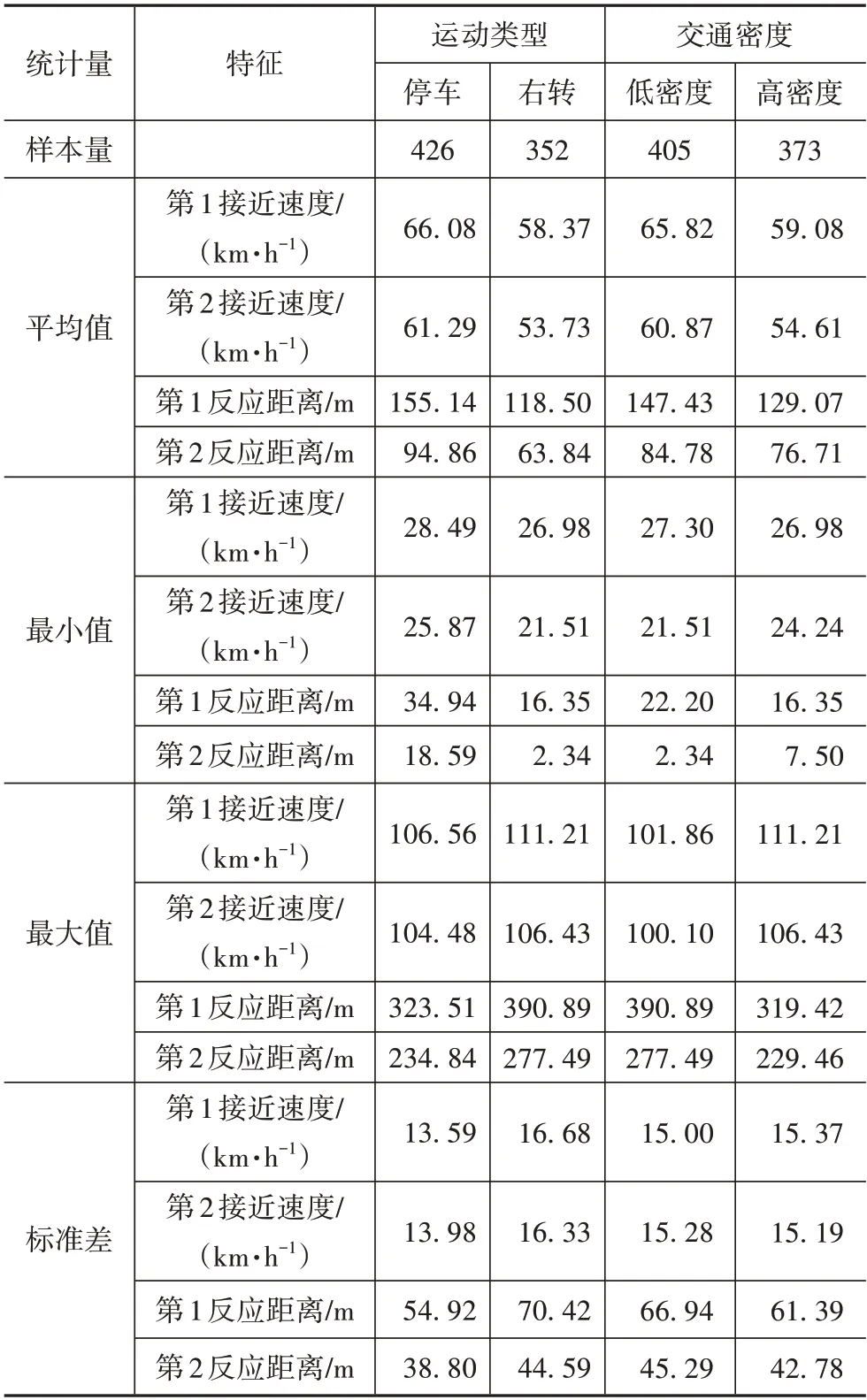
表3 反应特性的描述统计结果
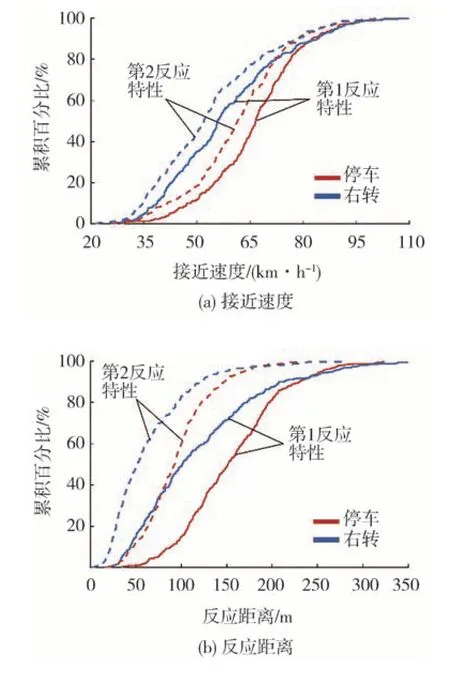
图5 反应特性在不同运动类型中的累积百分比曲线
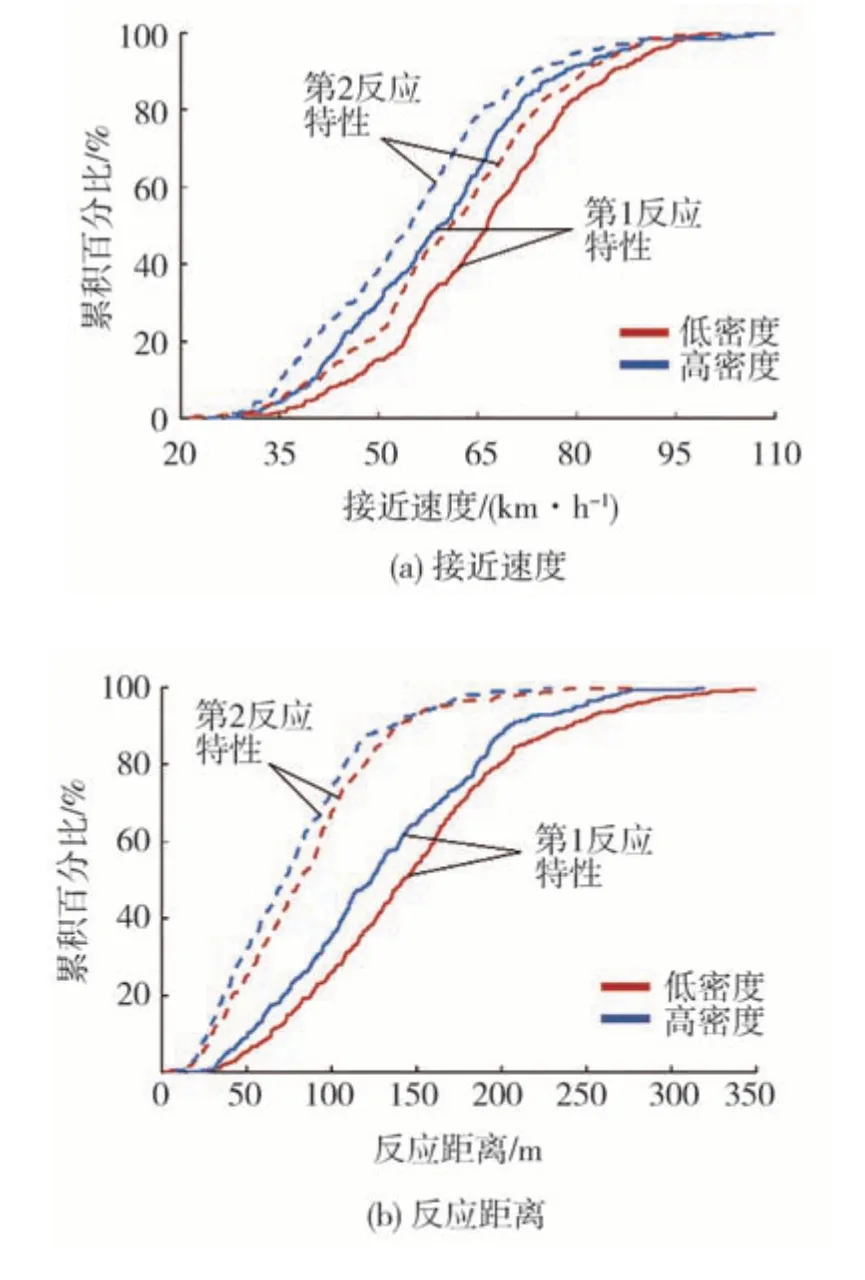
图6 反应特性在不同交通密度中的累积百分比曲线
2.2 运动类型对反应特性的影响分析
反应距离的分析结果如图7和图8所示。首先,从图中可以看出,接近速度和反应距离之间具有明显的相关性,接近速度越大,反应距离越长。运动类型对驾驶人的反应距离有显著影响(0.05),相比于右转行驶,驾驶人在交叉口停车时具有更长的反应距离,但随着接近速度升高到一定程度,运动类型对反应距离的影响不再显著。接近速度的分析结果如图9 和图10 所示,无论是在低密度交通中还是在高密度交通中,驾驶人松开加速踏板和踩下制动踏板时的速度在停车和右转行驶时均没有显著差异(>0.05)。
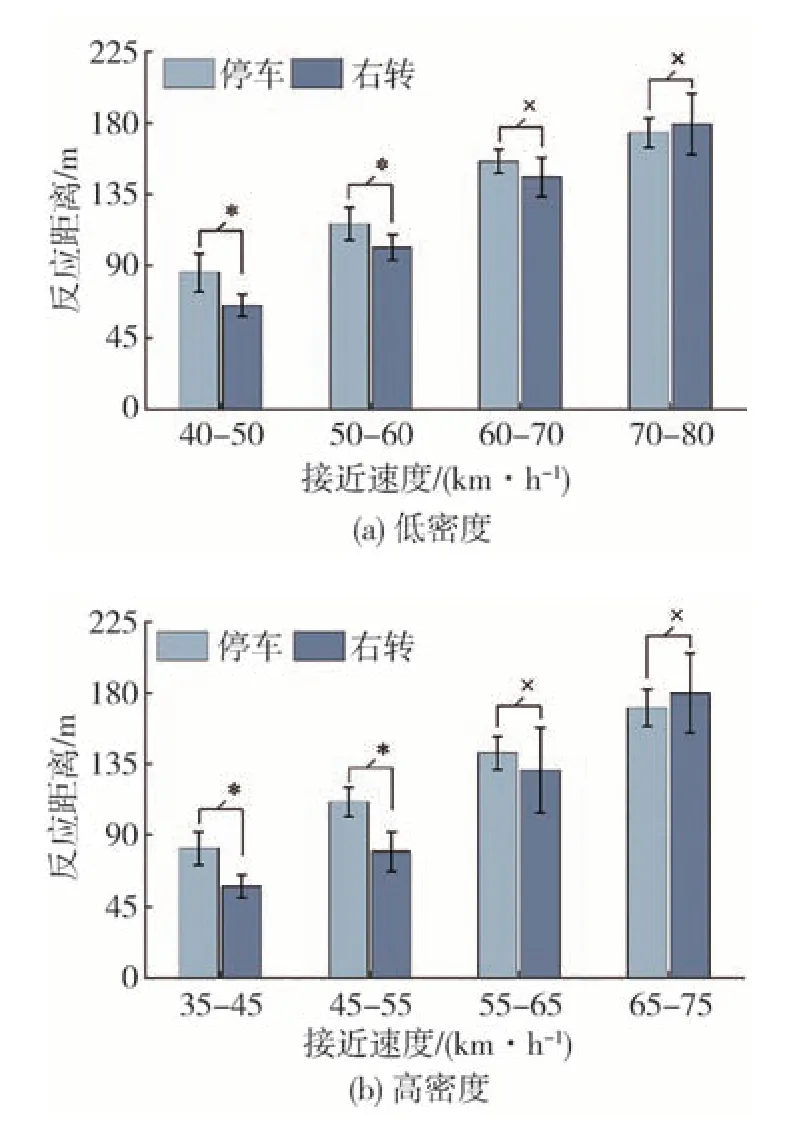
图7 运动类型对第1反应距离的影响
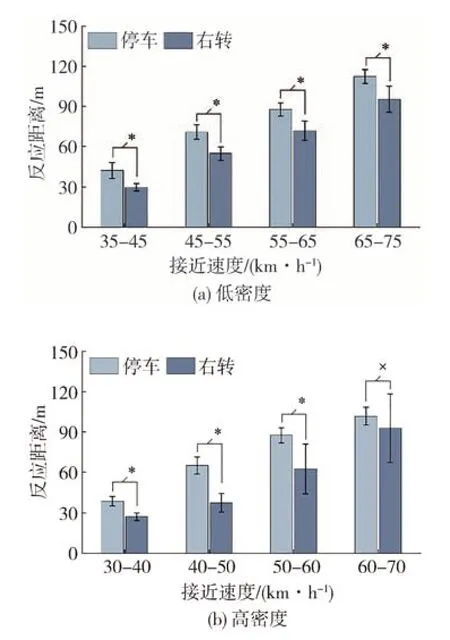
图8 运动类型对第2反应距离的影响
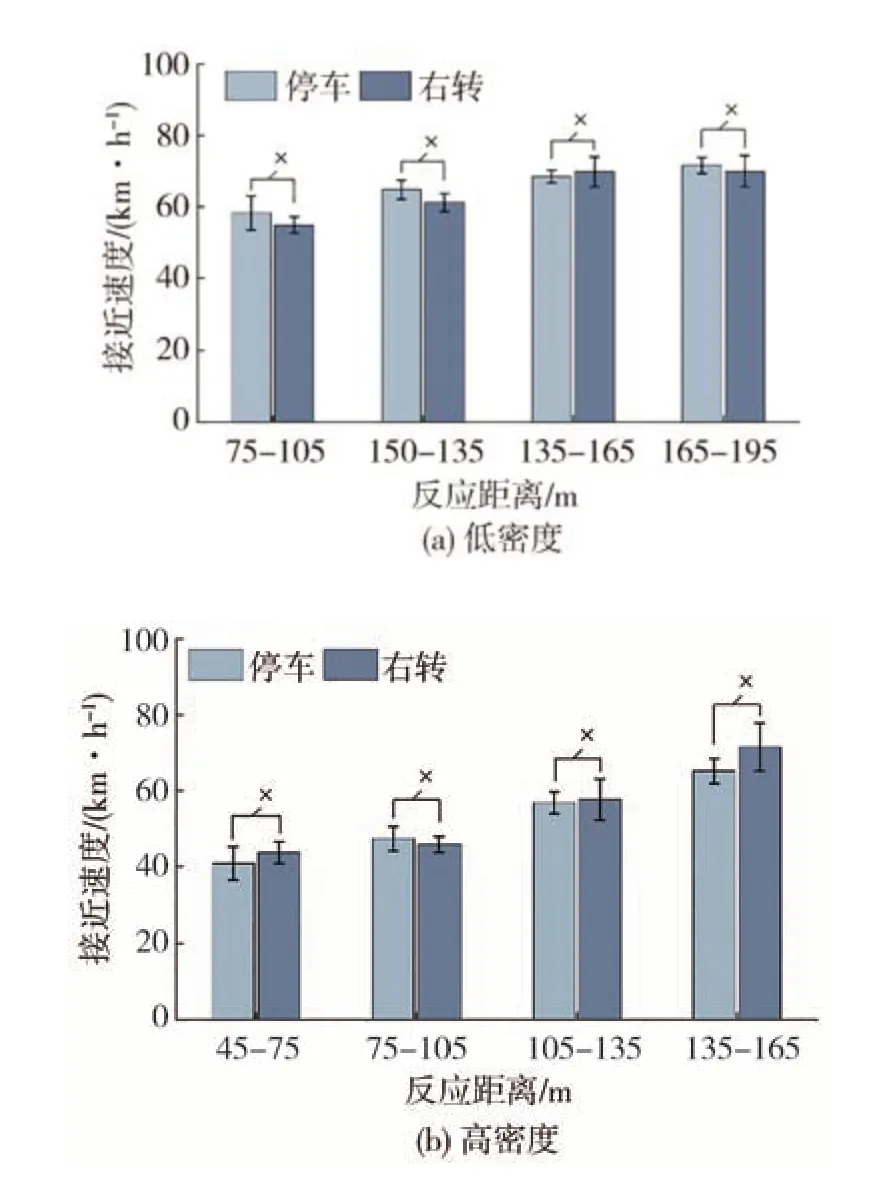
图9 运动类型对第1接近速度的影响
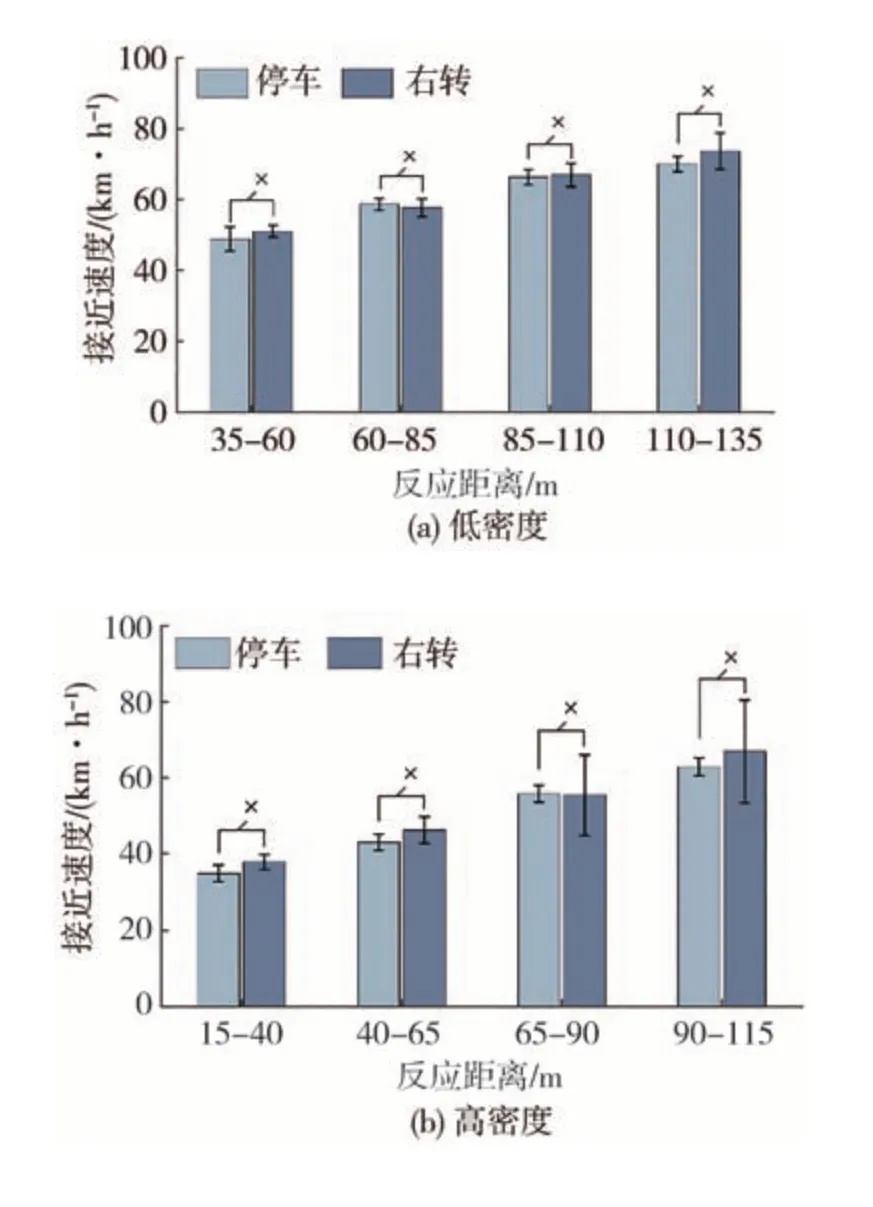
图10 运动类型对第2接近速度的影响
2.3 交通密度对反应特性的影响分析
交通密度对停车驾驶人和右转驾驶人的反应距离均没有显著影响(0.05),如图11 和图12 所示。2.2 节的结果显示停车驾驶人和右转驾驶人的接近速度没有显著差异,因此分析交通密度对接近速度的影响时不区分运动类型,结果如图13 所示,交通密度对接近速度产生了显著影响(0.05),高密度交通使驾驶人降低接近速度,当第1 反应距离极长时,交通密度对第1接近速度的影响不再显著。
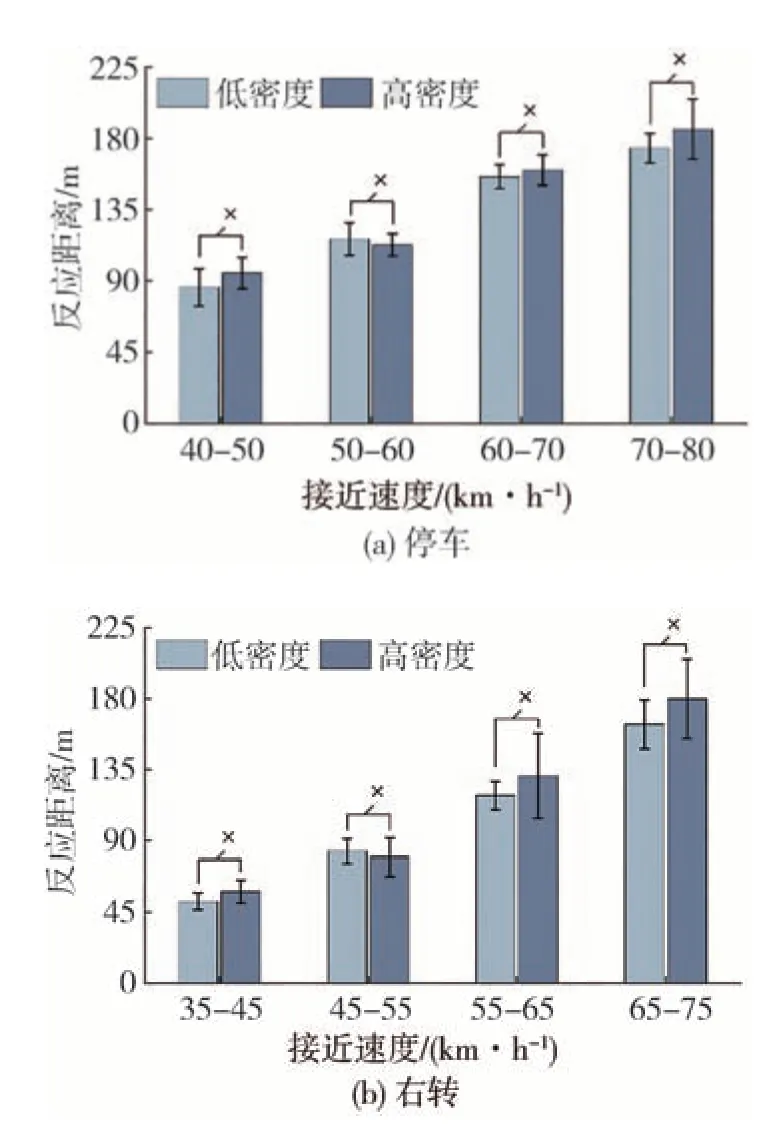
图11 交通密度对第1反应距离的影响
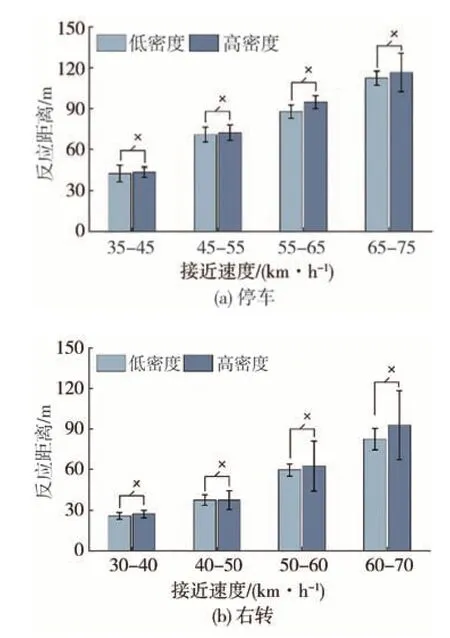
图12 交通密度对第2反应距离的影响
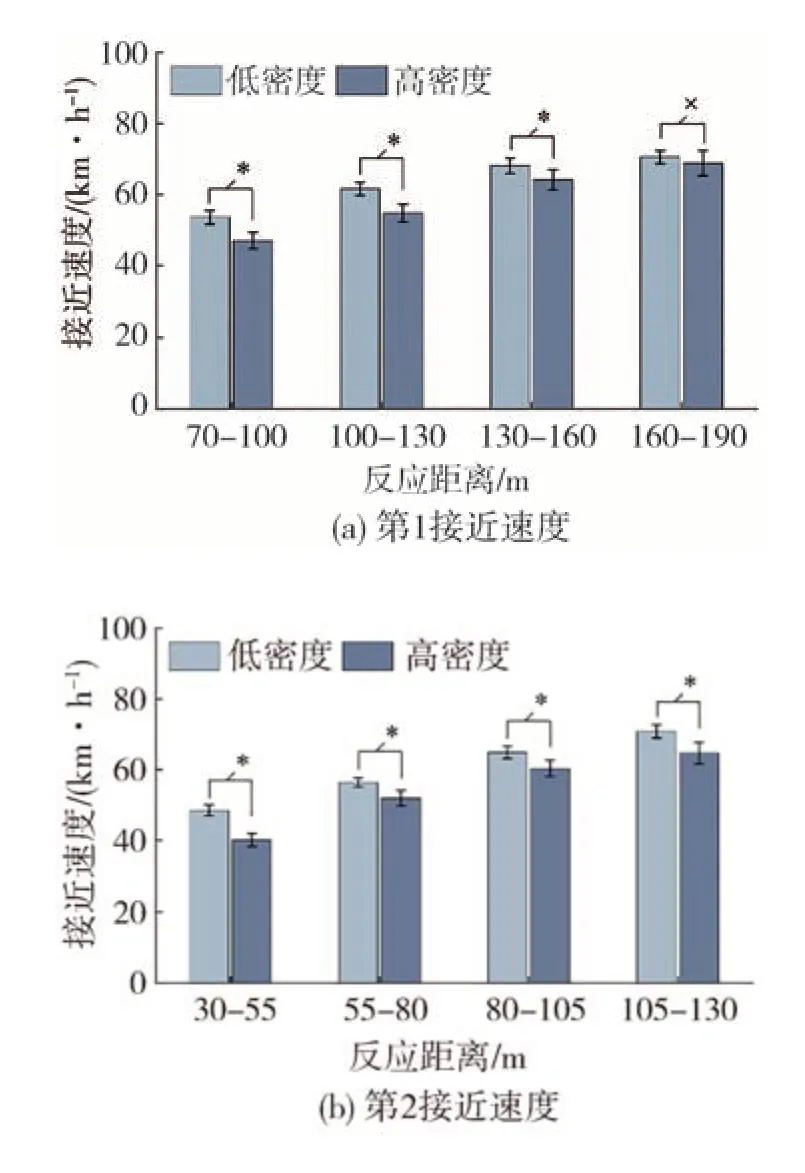
图13 交通密度对接近速度的影响
3 制动特性分析
本节建立分层线性回归模型分析车辆运动状态、运动类型和道路使用者对制动特性的影响。
3.1 考虑运动状态和运动类型的制动特性分析
首先,以运动状态和运动类型作为第1和第2层自变量,分别建立最大减速度、平均减速度和制动时间的分层回归模型,运动状态为第2接近速度和第2反应距离。回归分析结果见表4,表中结果为模型的未标准化系数。以运动状态为自变量的模型1 均是显著的(<0.001),加入运动类型变量后(模型2),拟合优度分别增加了0.051、0.025和0.258,值分别增加了108.792、83.270 和2 884.418,均具有统计学意义(<0.001)。这表明运动状态和运动类型均对驾驶人的制动特性有显著影响,最终模型纳入的3 个自变量在95%的置信水平上都是显著的。反应距离越长,最大减速度和平均减速度越小(绝对值),制动时间越长;开始制动时的速度越高,最大减速度和平均减速度越大,制动时间越短,与本研究结果不同的是,Wang等报告高速接近交叉口的驾驶人有更长的减速时间,这是因为他们分析减速时间在不同速度区间上的分布特征时忽略了减速距离的影响,而高速行驶的驾驶人通常具有较长的减速距离,这导致了较长的减速时间。与右转驾驶人相比,停车驾驶人的最大减速度和平均减速度更大,且比右转驾驶人约提前4.46 s开始制动。
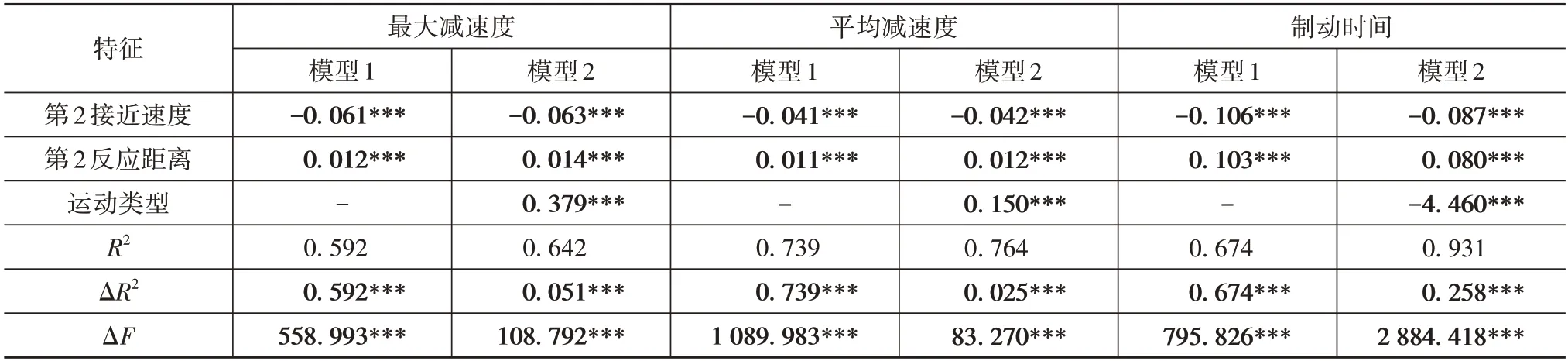
表4 考虑运动状态和运动类型的制动特性分析
3.2 基于停车和右转行驶的制动特性分析
为了分析交叉口区域的其他道路使用者对停车驾驶人和右转驾驶人制动特性的影响,以运动状态和道路使用者作为第1 和第2 层自变量分别建立基于停车和右转行驶的分层回归模型。道路使用者分为两类,一类是同向行驶的前车数量,一类是行人和骑车人的数量。
停车的回归分析结果见表5,以运动状态为自变量的模型1 均是显著的(<0.001),加入道路使用者相关变量后(模型2),最大减速度的变化量和变化量不显著(0.05),而平均减速度和制动时间的变化量和变化量显著(0.01;0.05),这表明驾驶人在交叉口制动停车时,除了运动状态,道路使用者也对制动特性产生影响,但主要影响减速水平和制动时间而未影响制动强度,随着同向行驶的车辆变多,平均减速度减小,制动时间变长。
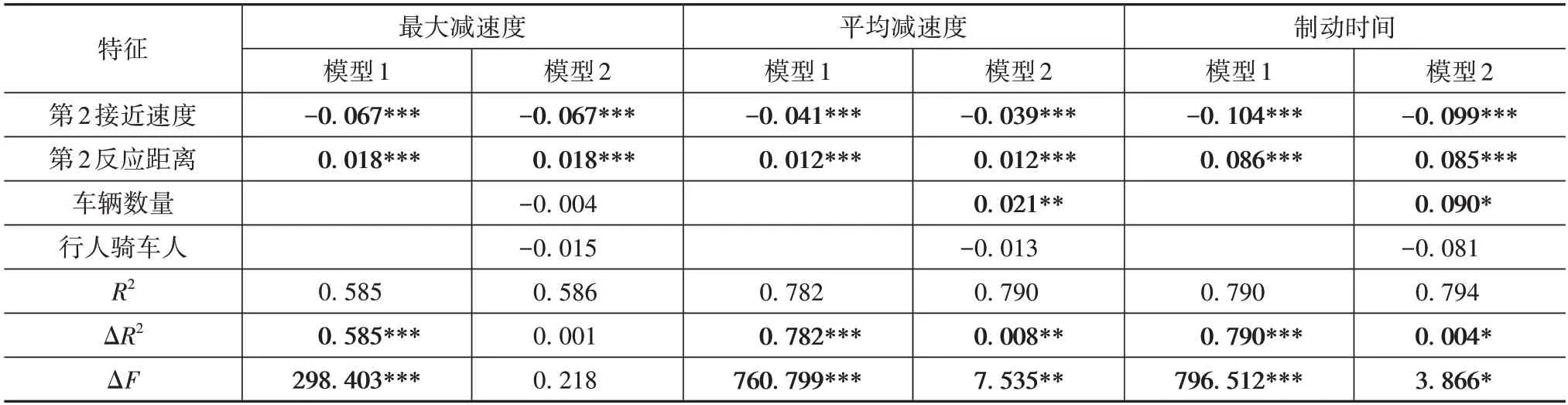
表5 基于停车的制动特性分析
右转行驶的回归分析结果见表6,以运动状态为自变量的模型1 均是显著的(<0.001),加入道路使用者相关变量后(模型2),最大减速度、平均减速度和制动时间的变化量和变化量都具有统计学意义(<0.01;<0.001;<0.001),即驾驶人在交叉口右转行驶时的各项制动特性都受到了运动状态和道路使用者的影响,与停车不同的是,影响右转驾驶人制动特性的道路使用者是行人和骑车人而非车辆,且交叉口的行人和骑车人数量越多,平均减速度和最大减速度越大,开始制动的时间越早。
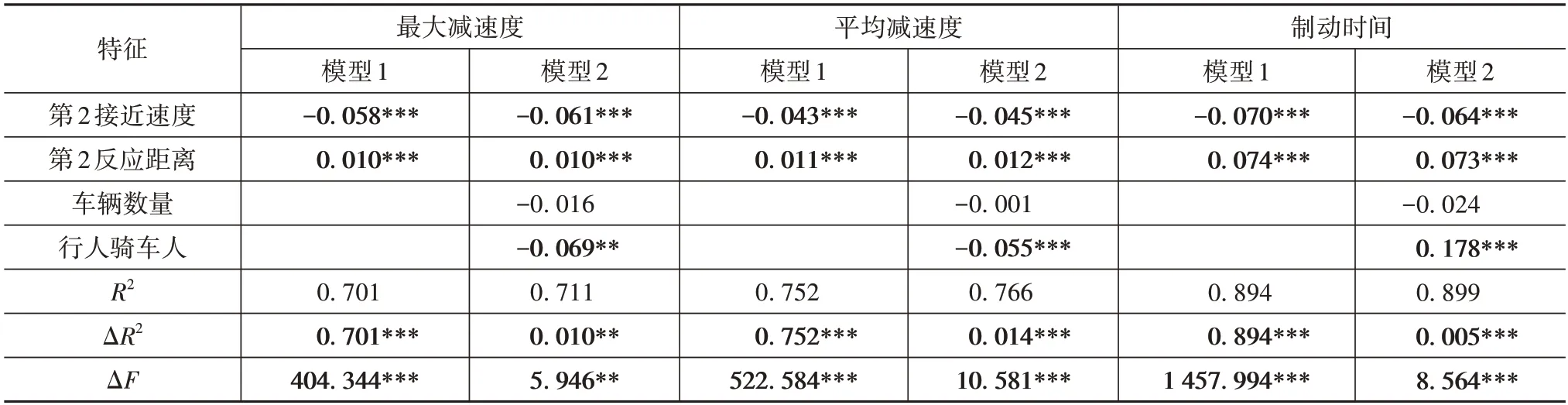
表6 基于右转行驶的制动特性分析
4 结论
(1)本研究从自然驾驶数据中提取了驾驶人接近城市交叉口的驾驶行为片段,使用YOLOv4 识别了交通场景中的各类道路使用者,在此基础上探讨了驾驶人在不同运动类型和交通密度下的反应特性差异,并分析了制动特性与运动状态、运动类型和道路使用者之间的关系。
(2)接近速度和反应距离之间存在明显的相关性,即接近速度越大,反应距离越长。右转驾驶人与停车驾驶人的接近速度没有显著差异,但与右转驾驶人相比,停车驾驶人在距离交叉口更远的地方开始减速和制动,当接近速度增大到一定程度时,这种差异不再显著。高密度交通使驾驶人降低接近速度,无论是右转驾驶人还是停车驾驶人。
(3)运动状态是影响制动特性最主要的因素,当接近速度较高或反应距离较短时,驾驶人在更短的时间内以更高的减速水平和制动强度接近交叉路口。相比于右转驾驶人,停车驾驶人的制动强度和减速水平更高,且比右转驾驶人约提前4.46 s 开始制动。交叉口的道路使用者对驾驶人的制动特性产生了不同影响,停车驾驶人主要关注同向行驶的他车,且减速水平随着车辆的增多而降低,而右转驾驶人则会因行人骑车人而增大减速水平和制动强度。
(4)本文中提出了新的车辆目标分类方法,该方法有助于提高驾驶辅助系统的类人感知能力。研究结果丰富了国内微观驾驶行为的理论研究,并为交叉口驾驶辅助系统的类人驾驶设计提供重要参考。未来研究将进一步考虑更多因素对交叉口驾驶行为的影响机理,并将研究结果和本文中提出的交通目标识别方法融入交叉口驾驶辅助系统的设计中,构建适用于我国驾驶环境的拟人化决策模型。
猜你喜欢
人民交通(2022年18期)2022-09-28
工业设计(2022年4期)2022-05-17
物流科技(2022年2期)2022-05-07
汽车实用技术(2022年7期)2022-04-20
现代青年·精英版(2022年3期)2022-04-06
新民周刊(2021年46期)2021-12-18
作文与考试·小学低年级版(2020年7期)2020-04-19
好日子(2018年5期)2018-05-30
科技创新与应用(2016年36期)2017-02-21
中国新闻周刊(2016年33期)2016-10-27
