
基于状态观测器的空间机器人滑模容错控制*
2022-06-29 14:30于潇雁
组合机床与自动化加工技术 2022年6期
谢 帅,陈 力,于潇雁,2
(1.福州大学机械工程及自动化学院,福州 350116;2.流体动力与电液智能控制福建省高校重点实验室,福州 350116)
0 引言
空间机器人作为太空探索的重要工具,越来越受到人们的广泛关注[1-5]。随着空间机器人被应用到高精度、高稳定性的空间任务中,对空间机器人控制系统可靠性与安全性有更高的要求。但是太空环境极其恶劣,空间机器人执行器难免发生故障,从而造成控制精度与稳定性下降,导致空间机器人难以完成期望任务。因此通过设计合适的容错控制算法,使得空间机器人系统在执行器故障的情况下仍正常工作具有很大的实际意义。
目前,国内外学者对机器人系统的容错控制进行了广泛研究,取得较为丰富的研究成果[6-9]。PILTAN等[6]提出了一种基于基于机器学习的主动容错控制算法,通过滑模观测器对故障估计、检测和识别。HAGH等[7]针对执行机构出现故障的情况,提出了一种基于非奇异终端滑模的主动容错控制方案,使用自适应扩展卡尔曼滤波器作为故障检测与诊断模块。宋齐等[8]依据反演法、非奇异积分滑模控制理论与高阶滑模控制理论,设计了一种反演滑模容错控制器。雷荣华等[9]设计了基于比例因子识别的自校正反馈神经网络容错算法,可对执行器的故障程度进行评估。
上述控制方法都有良好容错控制能力,但是需要测量系统的速度量或(与)加速度量,使得系统成本增加而且测量的速度可能包含大量的噪声信息,会影响控制性能[10]。并且文献[6]和文献[7]需要对执行器故障检测与隔离,控制器较为复杂,而其余几种方法考虑故障类型较为单一。考虑到在实际工程中,系统的模型误差与外界干扰常常伴随着整个控制过程。因此,在执行器部分失效的同时,空间机器人系统也会存在模型误差和外界干扰。
针对上述问题,本文设计了基于状态观测器的神经网络积分滑模容错控制器,通过状态观测器估计系统的速度量,利用神经网络对空间机器人系统的模型误差、外界干扰和执行器故障进行估计,并设计自适应估计补偿项。最后,通过数值仿真表明该方法具有快速收敛、抗干扰能力强的优点。
1 系统动力学建模
1.1 执行器故障建模
平面两杆的漂浮基空间机器人系统的结构如图1所示,由载体B0、机械臂B1和B2组成。其中,C为系统总质心,OC和Oi(i=0,1,2)分别为载体和机械臂的质心,OXY为系统惯性坐标系,Oixiyi(i=0,1,2)分别为载体和机械臂的分体坐标系。

图1 漂浮基空间机器人系统
在各分体上安装执行器来控制系统完成各项工作任务。执行器的故障可分为加性故障和乘性故障,考虑到故障可能是突然发生或者缓慢发生的。因此,对执行器故障表示如下:
φ(t,τ)=λ(t-tf)[(ρ-1)τ+Δτ]
(1)
式中,φ(t,τ)表示执行器故障的函数;0≤ρ≤1表示执行器乘性故障的有效因子;Δτ表示执行器加性故障的偏置力矩;λ(t-tf)表示故障发生的时间分布函数,其具体形式如下[11]:
(2)
式中,v>0表示故障发生速率。当v较大时,时间分布函数接近为突变函数,表示突变故障;当v较小时,时间分布函数缓慢变化,表示缓变故障。
1.2 空间机器人系统动力学建模
考虑图1所示的空间机器人系统,利用拉格朗日法推导出执行器故障的空间机器人系统动力学方程:

(3)

综合考虑模型误差和外界干扰的影响,空间机器人系统动力学方程式(3)可写为:
(4)

(5)

2 状态观测器的设计
2.1 状态观测器
为得到状态向量x2,设计如下状态观测器:
(6)

(7)
式中,k3为正常数,且满足k2=k3(k1-k3)。
由于不确定向量E在实际工程中无法获知,因此通过径向基神经网络对向量E进行逼近[12]:
E=wTσ(x)+ε
(8)
式中,w为E的理想神经网络权值;ε为神经网络估计误差;σ(x)表示输入为x的高斯基函数,简记为σ,表达式如下:
(9)
式中,cj为第j个基函数的中心位置;bj为第j个基函数的宽度;N为隐含层神经元个数。
假设向量E的实际神经网络逼近为:
(10)

(11)
式中,μ为正常数。
(12)
定义神经网络最小估计误差为:
(13)
假设1神经网络最小估计误差ξ有界,且满足:

(14)
式中,η为正常数。
2.2 稳定性分析
为分析状态观测器的稳定性,对式(7)求导,结合式(6)可得:
(15)
将式(5)与式(15)相减,结合式(12)和式(13)可得系统状态误差方程:
(16)



(17)
式中,δ为正常数。
通过Lyapunov函数直接法来分析观测器的稳定性,选取正定Lyapunov函数:
(18)
对上式求导,结合式(11)、式(14)、式(16)、式(17)可得:
(19)

3 积分滑模控制器
3.1 积分滑模控制器的设计


(20)

为了使系统在模型误差和执行器故障的影响下,轨迹跟踪误差快速收敛,设计如下的积分滑模面[13]:
(21)

在到达滑动模态的过程中,通过选用合适的趋近律可以保证到达过程的品质并减小系统的抖振现象。为减小抖振并加快收敛速度,本文使用快速幂次趋近律[14]:
(22)
式中,λ1>0;λ2>0;0<γ<1。
对滑模面式(21)求导,并结合式(15),可得:
(23)
由式(22)和式(23)可得基于积分滑模面的容错控制率为:
(24)
式中,τ为系统总控制率。由式中可以看出,该控制器不存在非奇异项,因此是一种非奇异控制方法。并且当不确定量E′已知时,该控制器精确可知,但是E′的实际大小在实际中难以获知,因此与第2.1节相似,此处使用神经网络来逼近E′的实际值:
E′=w′Tσ′(x)+ε′
(25)
假设实际神经网络逼近为:
(26)
神经网络权值自适应更新律为:
(27)
式中,ρ为正常数。
(28)
定义神经网络最小估计误差为:
(29)
为了进一步提高神经网络的逼近能力,通过自适应补偿项来估计神经网络最小估计误差。自适应补偿项的更新律设计如下:

(30)

因此,式(24)可重新写为:
(31)
3.2 稳定性分析
针对第3.1节所提控制器,通过Lyapunov函数直接法来分析其稳定性,选取正定Lyapunov函数:
(32)
对上式求导,结合式(23)、式(28)、式(29)、式(31),可得:
(33)
将式(27)和式(30)带入式(33),可得:
(34)
4 仿真算例
为验证基于状态观测器的积分滑模容错控制器的有效性,以图1所示空间机器人系统为例进行计算机仿真。

系统初始姿态为q=(0,0.5,0.5)T,其余量初始值为0。状态观测器参数为k1=100,k3=50,N=5,b=10,c∈[-1,1],μ=100;滑模面参数为β1=5,β2=10,α1=1/2,α2=2/3;控制律参数为ρ=100,k=2,λ1=5,λ2=10,γ=0.5。
为验证观测器与控制器的性能,分别在执行器无故障和有故障两种情况下仿真,并与计算力矩控制(CTC)[15]和自适应非奇异快速终端滑模控制(ANFTSMC)[16]对比。
4.1 执行器无故障
当执行器无故障发生时,系统仅受到模型误差和外界干扰的影响,仿真结果如图2和图3所示。

图2 载体姿态、关节角速度观测误差对比

图3 载体姿态、关节轨迹跟踪误差对比
从图2中可以看出,不论状态观测器中是否具有神经网络,观测器都能精确地跟踪系统状态的实际值,具有较小的观测误差,但是具有神经网络的观测器有更快的瞬态响应。从图3中可以看出,三种控制方法都可以使载体姿态、关节轨迹跟踪误差渐进收敛,具有一定的抗干扰能力,但是本文方法相比于其他两种方法具有更快的收敛速度。
4.2 执行器有故障
为验证控制器的容错能力,假设系统中执行器存在突变故障,故障向量为:

(35)
上式表示在6 s后,系统载体的执行器失去50%的有效驱动力;在12 s后,在载体执行器发生故障的基础上,关节1的执行器失去60%的有效驱动力,同时具有20 N·m的偏置故障;关节2的执行器在整个控制过程中正常无故障。
当执行器有故障时,系统同时受到模型误差、外界干扰和执行器故障的影响,仿真结果如图4和图5所示。

图4 载体姿态、关节角速度观测误差对比
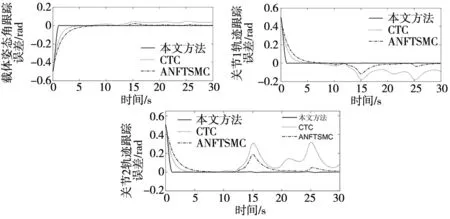
图5 载体姿态、关节轨迹跟踪误差对比
从图4可以看出,在执行器发生故障后,没有神经网络的状态观测器虽能跟踪系统实际状态,但观测器的估计值与实际值之间具有较大观测误差,将会影响控制器的控制效果。相比之下,具有神经网络的状态观测器在跟踪实际状态的过程中仅稍有波动,具有较小的观测误差和强鲁棒性。
从图5可以看出,在6 s与12 s之间,即仅有载体执行器发生故障时,CTC和ANFTSMC两种方法对系统的轨迹跟踪误差稍有波动;在12 s之后,即载体和关节1执行器都发生故障时,两种方法跟踪系统期望轨迹出现较大误差。而本文方法在执行器发生故障后,仍能够有很好的轨迹跟踪效果,在整个控制过程中具有瞬态响应快和稳态误差小的优点,具有良好的容错控制能力。上述仿真结果表明了控制方案的有效性。
5 结论
(1)针对具有模型误差、外界干扰和执行器部分失效故障的空间机器人系统,通过状态观测器对系统状态变量进行估计,并基于积分滑模面设计了自适应神经网络积分滑模控制器。
(2)本文控制方法具有以下优点:具有神经网络补偿的状态观测器对载体和关节角速度进行估计,不需要测量角速度量,提高了观测器的估计精度,减小了速度传感器测量不准确带来的影响;通过神经网络对模型误差、外界干扰和执行器故障实时估计并在控制器中补偿,不需要知道未知量的大小,使控制器具有较小稳态误差和良好容错能力;基于积分终端滑模面设计控制器,使得系统状态初始时刻位于滑模面上,减小滑模控制的到达过程,使系统状态误差快速收敛。仿真结果表明了理论推导的正确性以及控制方法的有效性。
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
汽车实用技术(2022年15期)2022-08-19
大电机技术(2022年2期)2022-06-05
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
汽车维修技师(2019年2期)2019-08-23
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年24期)2017-02-02
