
基于改进自适应IMM-UKF算法的水下目标跟踪
2022-06-25 08:28王平波
电子与信息学报 2022年6期
王平波 刘 杨
(海军工程大学电子工程学院 武汉 430033)
1 引言
水下目标精确跟踪的困难主要表现在两个方面:一是水下目标在环境多变,未知因素多的海洋中运动,其运动状态难以由简单模型描述;二是水下目标的探测、定位和跟踪依赖声呐这种自身探测精度不高的传感器,量测误差较大。因此在外部环境和自身装备的限制下,如何利用有限的资源进行更加精确的目标跟踪是研究的重点。
交互式多模型(Interacting Multiple Model, IMM)算法是机动目标跟踪的一种有效方法[1-3],它可以融合目标多个可能的运动状态并行工作,通过马尔可夫转移概率矩阵实现模型间的转换,该方法不需要机动检测,具有全面自适应的跟踪能力。滤波器的选择直接影响IMM算法性能,无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)[4]从统计学角度出发,采用无迹变换得到Sigma点来对非线性系统进行近似,与扩展卡尔曼滤波器(Extend Kalman Filter, EKF)相比拥有更高的估计精度和稳定性,而计算量远小于粒子滤波器[5-7]。因此选用UKF滤波器构成IMM-UKF算法在目标跟踪领域得到了广泛的应用。但是标准IMM-UKF算法的模型间切换存在滞后性,往往在目标发生机动后一段时间算法才能切换为匹配模型进行跟踪。具有自适应调节能力的IMM-UKF算法能利用后验信息对转移概率矩阵进行调节[8-12],克服了传统算法模型切换速度的不足,在水下目标跟踪领域得到了广泛的应用。文献[8]定义修正参数为似然概率之比进行转移概率矩阵的修正,但是当目标机动时,非匹配模型似然函数值接近0,采用该方法有一定概率出现奇异现象,导致滤波中断。文献[9]通过子模型后验概率自适应地递推估计模型转移概率矩阵。文献[10]考虑模型之间相互作用的情况,利用相邻时刻模型概率之比对转移概率矩阵进行实时修正。文献[11]由转移概率和模型后验概率定义模型的误差压缩率之比。文献[9~11]的方法提高了目标机动时刻模型切换速度,但在非机动时刻匹配模型概率较低,导致跟踪精度不理想。文献[12]在文献[8]修正参数基础上进行改进,克服了模型转移概率奇异现象,同时提升了模型切换速度。
本文兼顾模型切换速度和跟踪精度,结合主动声呐水下目标跟踪场景,采取增加判定窗2次修正转移概率矩阵的方法对现有AIMM-UKF算法进行了改进,使得算法模型切换速度加快,匹配模型概率值增大,跟踪效果有了较大的提升。
2 目标模型


3 AIMM-UKF算法
3.1 标准IMM-UKF算法
标准IMM-UKF算法由4个部分组成,算法流程如图1所示,其中交互作用器进行模型条件初始化和重新初始化过程;滤波器采用UKF算法进行模型条件滤波,对目标状态进行预测;模型概率估计器对运动模型的概率进行更新;估计混合器输出各滤波器的融合估计。IMM算法包含两个以上的目标运动模型,模型之间通过马尔可夫转移概率矩阵进行交互。下面详细分析含有N个模型集合的IMM-UKF算法从k-1时刻到k时刻的递推过程。
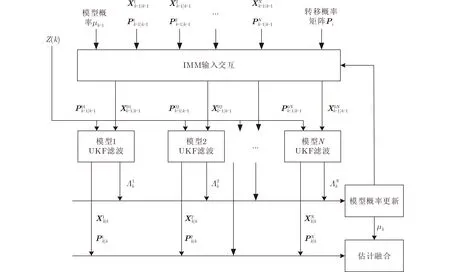
图1 IMM-UKF算法流程图
(1)交互输入。即对模型条件初始化或者重新初始化,得出模型当前时刻各个UKF滤波器输入的状态向量和协方差矩阵。

3.2 AIMM-UKF算法
标准的IMM-UKF算法常根据先验知识或者直接人为选择固定的转移概率矩阵[13],显然对于机动目标是不准确的,跟踪的精度会受影响。当目标发生机动,不匹配模型转为匹配模型的概率应当会增加,而保持现有模型的概率应减小。基于此,文献[12]在文献[8]的修正参数基础上进行改进,重新定义修正参数为

4 改进的AIMM-UKF算法
为了更加充分地利用后验信息对IMM-UKF算法进行自适应修正,本文在文献[12]的AIMM-UKF算法基础上,设定一个比较模式概率预测值的判定窗,对转移概率矩阵进行2次修正。修正规则为
(1)找出k时刻各个模型的概率预测值的极大值
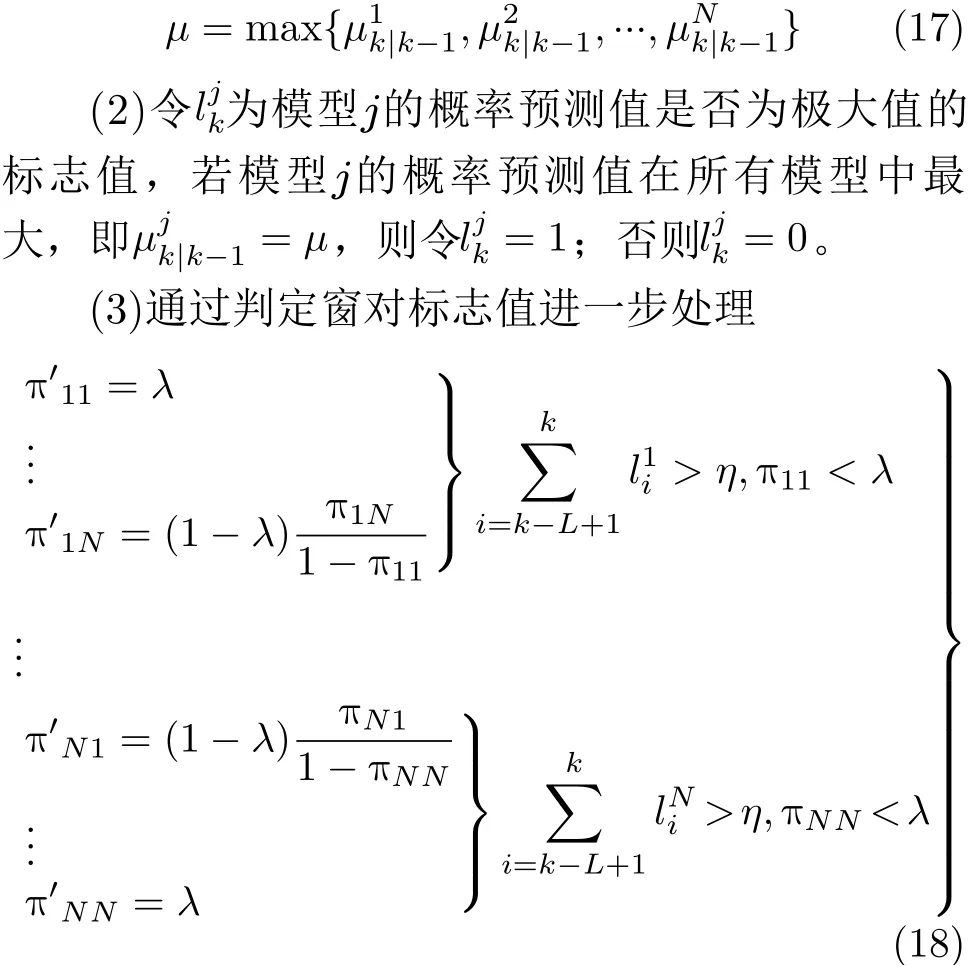
其中,L为判定窗的长度;η为门限值,在(0.5L,L]中取值;λ为本文设定的转移概率矩阵调节参数,在(0.9,1)中取值。L和η共同决定了2次修正的灵敏度,L值越大则表示匹配模型概率预测值要持续更久时间为极大值,才能激活2次修正,当L取值太大时就失去了2次修正的意义,性能与常规AIMMUKF算法无差别。L值也不能过小,否则会因为滤波存在误差,导致非匹配模型概率通过2次修正大于匹配模型概率。经过仿真,取值3~5最优。η取值一般略小于L,赋予了模型概率预测值一定的容错率,当窗长L内有小于L-η次误判,仍然可以正常执行2次修正。当所用声呐测量误差较小,算法跟踪精度较高时,可以取η=L。λ决定了目标机动后改进算法对模型概率的修正速度,对于弱机动目标一般取接近1的值,而强机动目标的运动模型切换频繁,取值接近0.9为宜,便于在下次机动时转移概率矩阵实现快速调整。
具体操作过程为若判定窗内模型j的标志值累加后大于门限值η,就认为目标在一段时间内未发生机动,k时刻目标的匹配模型为模型j。此时若满足πjj<λ, 则令转移概率矩阵中第j行的元素π′jj=λ,保证匹配模型转向匹配模型的概率在短时间内充分增大。然后根据k-1时刻第j行其他元素值的大小权重分配剩下的概率值 1 -λ,使得满足转移概率矩阵各行数值之和为1的要求。
(4)在数据长度小于L的跟踪初始阶段,以及其他不满足2次修正规则的时刻,仅采用文献[12]自适应算法进行修正。
5 仿真实验
5.1 CV, CA, CT模型
以2维平面上单目标运动的跟踪为例进行仿真分析,0~30 s做匀加速直线运动,30~150 s做匀速直线运动,150~210 s做角速度为0.03 rad/s的匀速右转弯运动,210~300 s做匀速直线运动。仿真参数结合主动声呐运用背景设置,如表1。
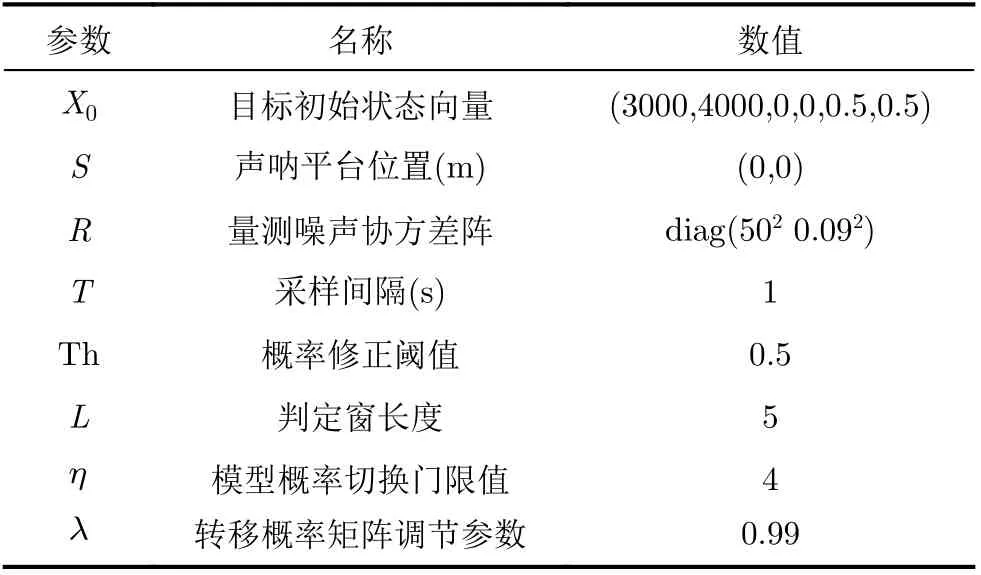
表1 仿真参数
选用CV, CA和CT 3个模型,模型初始概率均为1/3,转移概率矩阵P=[0.8 0.1 0.1;0.1 0.8 0.1;0.1 0.1 0.8]。分别以本文算法、文献[12]算法和标准IMM-UKF算法进行200次蒙特卡罗仿真,得到图2-图7和表2,通过跟踪轨迹、位置均方根误差、速度均方根误差等来分析跟踪算法性能的优劣。
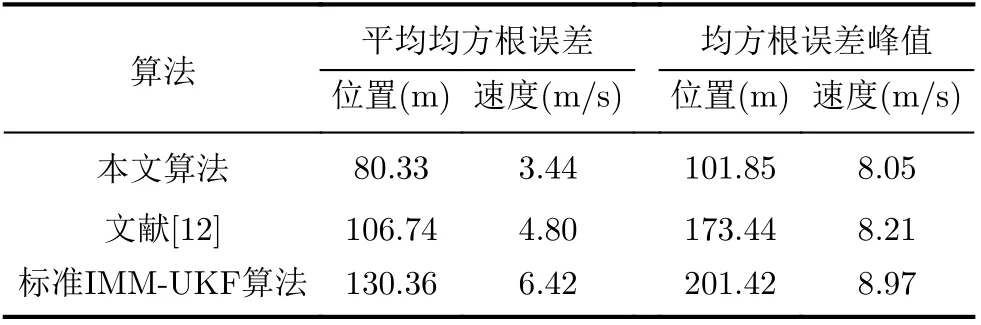
表2 各算法跟踪性能数据
图2为3种算法在转弯前后的跟踪轨迹图。从图中可以看出本文算法拥有更好的跟踪精度,不仅在匀速阶段预测的目标位置更接近真实值,而且匀速直线到转弯的切换过程更迅速,转弯时跟踪性能相比于其他两种算法优势明显。
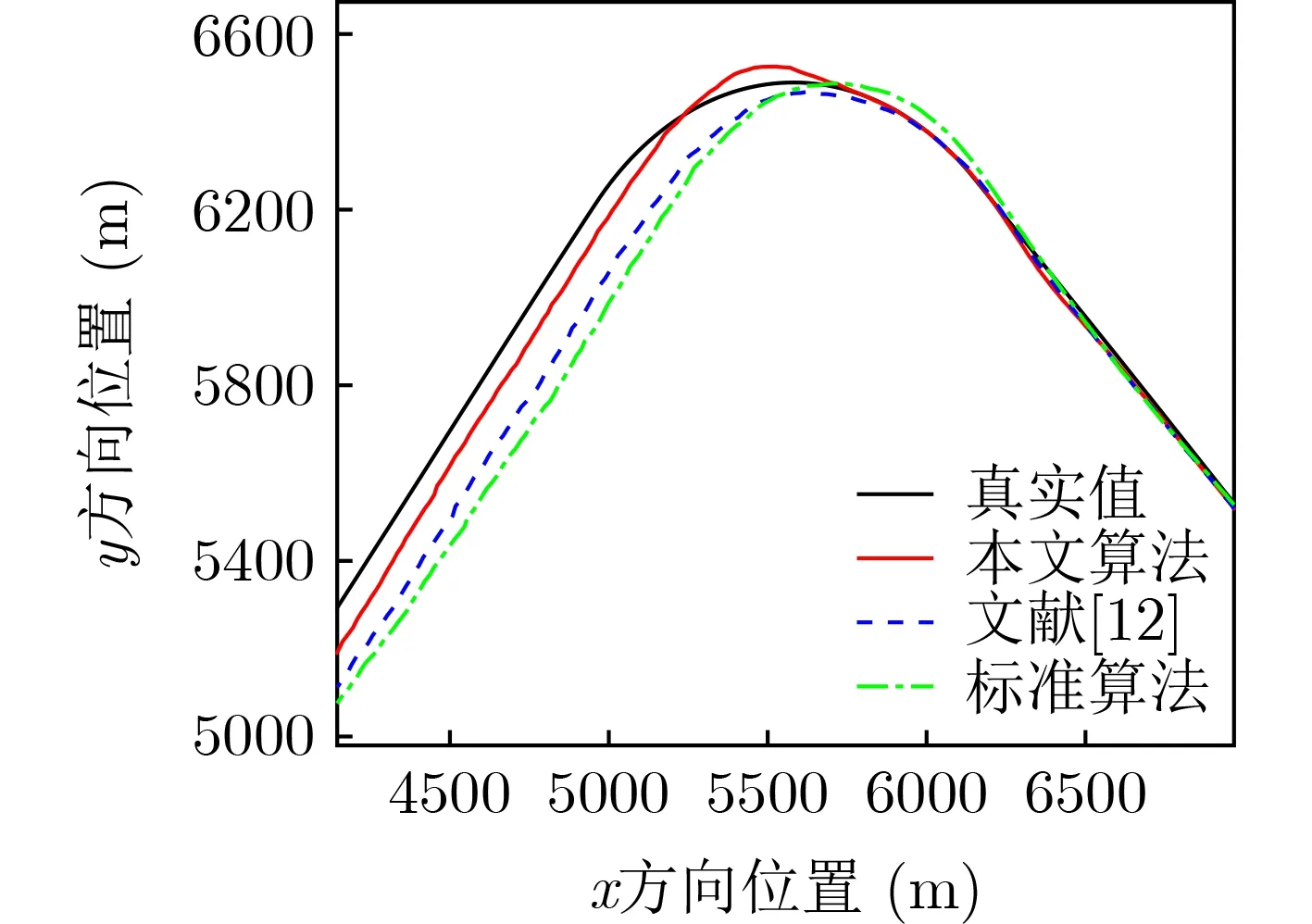
图2 跟踪轨迹
图3为不同时刻3种算法的位置均方根误差,从中可见跟踪初始阶段,3种算法的误差值很接近。在50 s附近,匀加速切换为匀速的过程中本文算法误差略大于其他算法。其他时间段内,由于本文算法增加了转移概率矩阵的2次修正,使得模型间的切换更迅速,而且在非机动时间内,匹配模型的概率值能最大化,位置均方根误差要远低于文献[12]和标准算法。图4为不同时刻3种算法的速度均方根误差,从中可知在大多数时间,本文算法的速度均方根误差远低于其他算法。
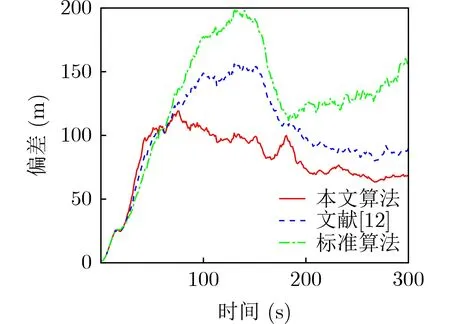
图3 位置均方根误差
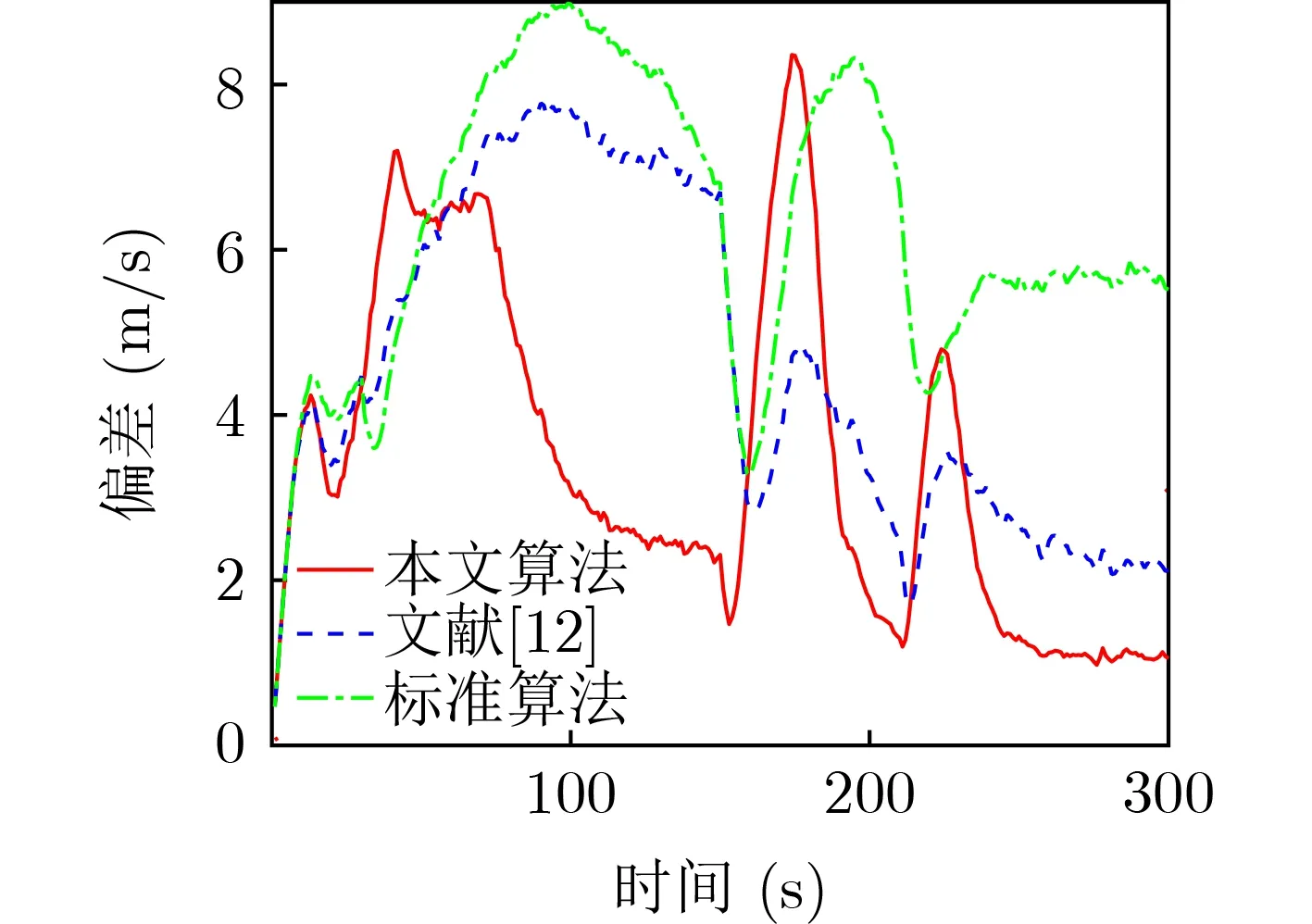
图4 速度均方根误差
图5-图7为3种算法的模型概率变化曲线,这是决定IMM算法性能的关键因素。从图中对比可以发现,标准算法匹配模型和非匹配模型概率变化不明显,因为没有利用后验信息对概率矩阵进行修正,所以概率值只在30%~38%浮动,甚至在部分时间段匹配模型的概率要低于非匹配模型,基本没有实现模型间的切换。文献[12]算法虽然有模型间的切换,但是切换速度较慢,而且匹配模型的概率最高也只能达到65%左右,有待进一步增强。本文算法对于提高匹配模型概率,抑制非匹配模型概率的效果更加理想,当目标趋于某一稳定运动模型时,该模型的概率值能达到80%以上。而且机动时刻概率曲线的斜率明显大于另外两种算法,模型切换速度更快。

图5 标准算法模型概率变化曲线

图6 文献[12]模型概率变化曲线

图7 本文算法模型概率变化曲线
表2可以看出,本文算法在观测时间内的各项统计结果都是3种算法中最小的。其中平均位置均方根误差、平均速度均方根误差和位置误差峰值与其他算法相比优势明显。平均位置均方根误差相比文献[12]算法和标准算法,分别降低了38.37%和24.74%,速度均方根误差则分别降低了46.42%和28.33%。
5.2 CV, CT(左), CT(右)模型
为充分验证算法的性能,参考文献[12]的目标运动轨迹及参数进行仿真。目标在1~60 s做匀速直线运动;60~110 s做匀速左转弯,角速度为0.02 rad/s;110~180 s做匀速直线运动;180~240 s做匀速右转弯,角速度为0.02 rad/s;240~300 s做匀速直线运动。其他仿真参数设置同5.1节,得到结果如图8-图13和表3。

表3 各算法跟踪性能数据

图8 跟踪轨迹
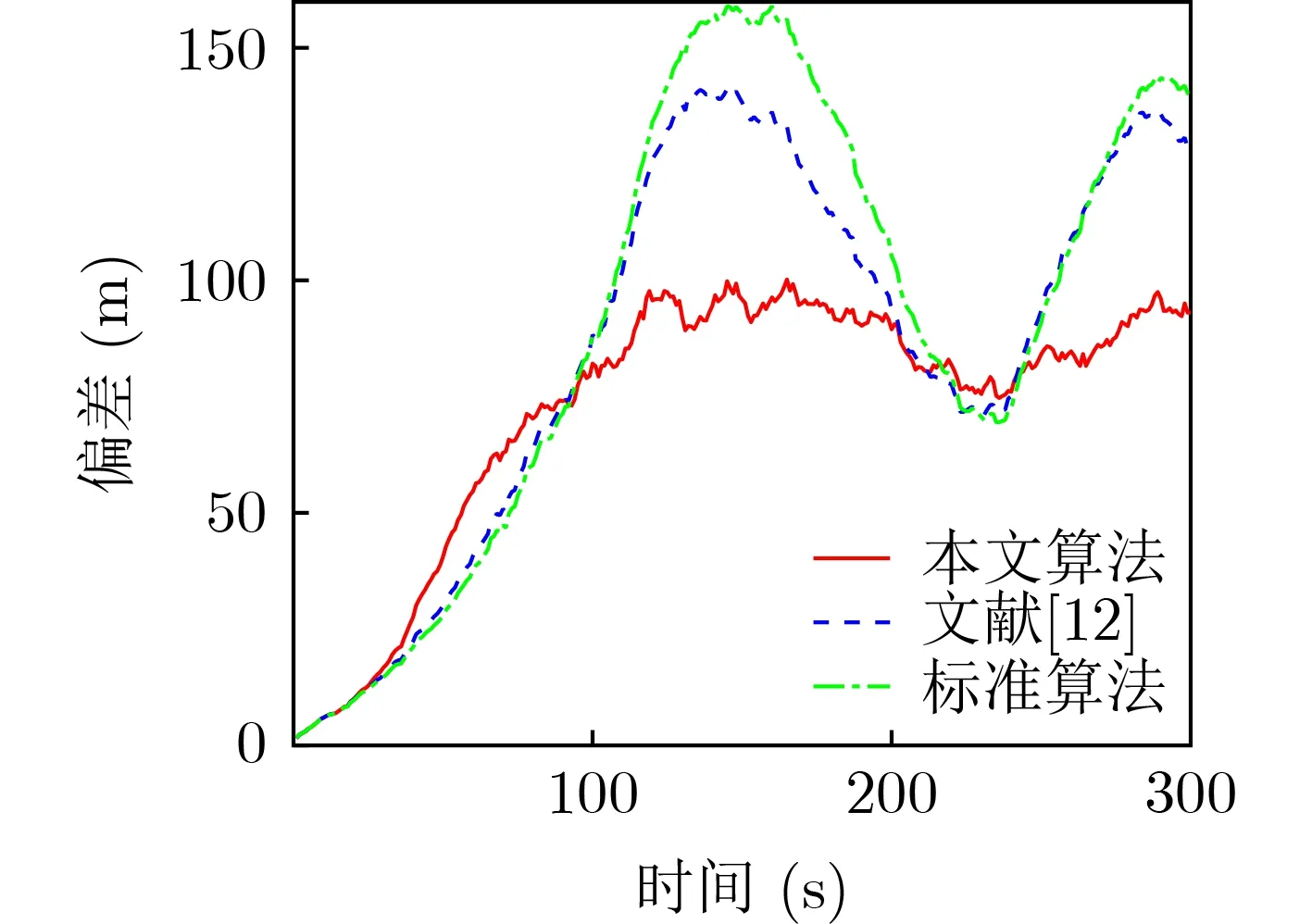
图9 位置均方根误差
从图8-图10可见,整体上本文算法优于其他算法,在滤波初始时间段内会出现误差略大的情况;图11-图13可以看出,标准算法的概率随时间变化不明显,而且模型匹配度较差;文献[12]算法在目标机动能较快地完成模型切换,但是在非机动时刻匹配模型的概率提升较慢;本文算法既保证模型切换速度,也增强了匹配模型概率,但在初始阶段有小的误差,不匹配模型概率稍大于匹配模型。

图10 速度均方根误差

图11 标准算法模型概率变化曲线
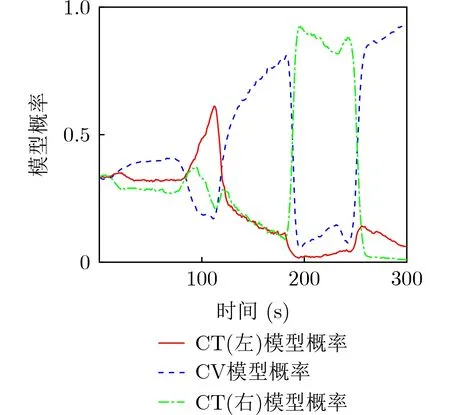
图12 文献[12]算法模型概率变化曲线
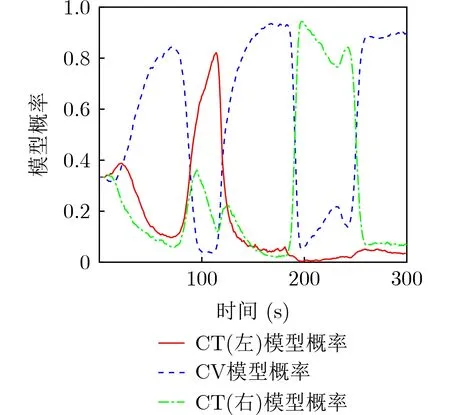
图13 本文算法模型概率变化曲线
从表3可以看出,本文算法在各项精度数据上仍然是最优的,但优化效果与5.1节结果相比不够明显,平均位置均方根误差和速度均方根误差相比文献[12]算法,分别只降低了15.56%和19.35%。这是因为在5.2节仿真条件下,目标机动次数较多,每一运动状态持续时间较短。而本文算法对于非机动时刻跟踪精度的优化效果要强于机动时刻的优化效果。因此在目标机动频率变高时,均方根误差的优化程度会略有降低。综合仿真结果来看,在文献[12]仿真实验所用的航迹下,本文算法也能表现出更优异的性能。
6 结束语
针对现有AIMM-UKF算法的不足,本文在文献[12]自适应算法基础上,提出了一种改进AIMM-UKF算法,通过判定窗对转移概率矩阵进行2次修正。通过水下目标跟踪的仿真实验,表明该方法能有效地提升匹配模型概率,抑制非匹配模型影响,降低跟踪过程中的误差,在水下机动目标的跟踪上具有很好的应用价值。
需要进一步说明的是,加判定窗的改进算法也适用于其他AIMM-UKF算法,不局限于文献[12]。同时AIMM-UKF算法的性能越好,本文改进算法的提升效果也会越明显。通过改进UKF算法,提升各个模型的滤波精度也能使得2次修正效果有一定提升。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
环境技术(2022年1期)2022-03-21
快乐语文(2021年35期)2022-01-18
当代陕西(2019年12期)2019-07-12
飞天(2019年6期)2019-07-08
汉语世界(The World of Chinese)(2019年1期)2019-03-18
摄影之友(影像视觉)(2017年1期)2017-07-18
北京航空航天大学学报(2016年9期)2016-11-16
制导与引信(2016年3期)2016-03-20
新高考·高二数学(2015年2期)2015-05-27
