卡塞格林系统结构设计与仿真
2022-06-23 10:58:06张美君虞林瑶张宇鹏李永刚
机电工程技术 2022年5期
王 健,张美君,虞林瑶,张宇鹏,李永刚
(中国科学院长春光学精密机械与物理研究所,长春 13000)
0 引言
随着国防军工的各个领域提出的要求不断提高,卡塞格林系统已经广泛应用于光电平台中。卡塞格林系统与透射式系统相比,其优势是大口径、长焦距、多波段。卡塞格林光学系统口径大,接近衍射极限,需要高超的装调技术及能适应复杂环境的结构支撑保证光学系统成像质量,主镜装调难度及主镜支撑结构件的设计难度最高[1-3]。传统的光学结构单独仿真不准确,这是因为光学仿真中没有包括结构变形所产生的偏移、偏心和倾斜[4]。现阶段,主要分析重力因素对主镜面形的影响,极少分析温度变化对主镜面形的影响[5]。光学镜片和结构件具有不同的热膨胀系数和杨氏模量,主镜反射面会产生刚体位移、表面变形等变化,从而光轴发生偏移并使成像质量降低。光电平台是一个密闭的平台,内部存在大量的电子元器件,电子元器件工作时产生大量的热,热量无法及时散失导致主镜系统温度升高,主镜面形发生变化。光电平台应用在太空或高空环境,平台受到功率限制,热控系统无法使平台内部温度维持在20 ℃,主镜面形也会受到影响。因此,光机设计时必须考虑温度因素。减小温度变化对主镜面形的影响,需要设计主镜结构和主镜支撑结构。结构设计完成后仿真分析,分析温升(或温降)对主镜面形的影响,评价是否对成像质量产生影响。再次优化结构,进行对温度的敏感度分析。最终实现降低系统质量和保证成像质量的目标。
本文使用光机热集成仿真分析的方法,每温升(或温降)5 ℃设置一个边界条件,汇总各个边界条件的分析结果,分析一个三点支撑的主镜系统对温度的敏感程度。根据分析结果对系统内主镜结构和支撑件结构优化,改变主镜材料,改变支撑方式,实现减小系统质量的目标。分析新系统对温度的敏感程度,评价是否满足光电平台像质要求。最终使系统更适用于严苛的航空航天环境。
1 卡塞格林系统的光机结构
卡塞格林系统是一个两镜系统,一个是凹面的主镜,另一个是凸面的次镜。平行光经过主镜和次镜的反射汇聚到焦平面处[6]。由于主镜口径大,主镜面形易受到外界环境因素的影响。因此,设计衬套和柔节支撑主镜,呈三点排布。如图1 所示,主镜系统由大口径反射镜、嵌套、柔节和背板等组成。主镜使用碳化硅材料,原因是碳化硅材料有比刚度大、热变形系数小、尺寸稳定、强度高的优点。嵌套由强度较高、热稳定性好的殷钢材料制成。其余零件是由机械性能强、密度低的钛合金制成。嵌套和主镜之间是以胶粘的方式连接,嵌套与柔节之间是螺栓连接,衬套和柔节以螺栓连接的方式连接到背板上,最后整体与主镜室相连。系统总质量为3.6 kg。20 ℃主镜安装后的波相差1∕33 λ,如图2所示。
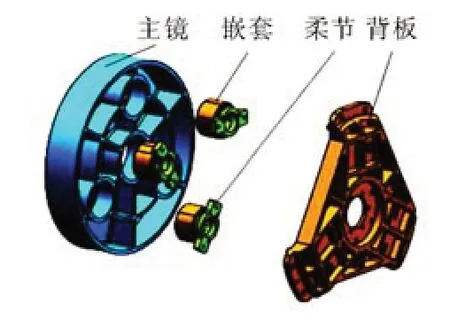
图1 主镜及其支撑件Fig.1 Primary mirror and its support
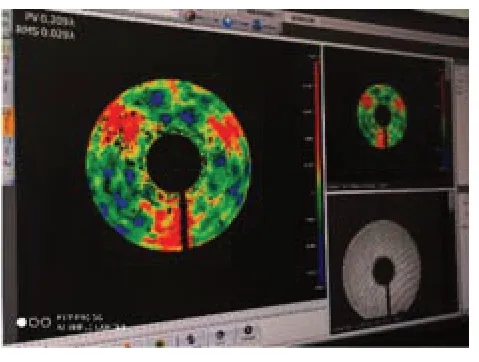
图2 主镜检测图Fig.2 Primary mirror inspection map
2 卡塞格林系统对温度敏感程度分析
本文研究卡塞格林系统对温度的敏感程度,其流程如图3 所示,本文基于光机热集成分析的方法,分析5~35 ℃范围内主镜表面形变量。基于Zernike多项式拟合主镜面形变化,记录以20 ℃为中心每温升(或温降)5 ℃主镜面型变化情况。
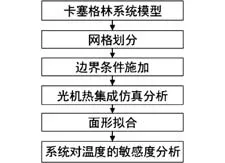
图3 卡塞格林系统对温度的敏感程度分析流程Fig.3 Flow chart of temperature sensitivity analysis of Cassegrain system
2.1 光机热集成有限元仿真分析
光机热集成分析方法是一种结合了光学、机械、热学各学科设计分析为一体的方法,是一种高度系统化、集成化的设计方法。
本文使用HyperMesh 对模型(除主镜室外)进行抽中面处理,相应部件划分网格,并赋予各个中面厚度,网格大小和类型、材料属性如表1 所示,网格划分结果如图4 所示。以节点耦合的方式模拟胶粘连接,使用MPC 约束模拟螺栓连接。加载5~35 ℃的温度载荷,间隔5 ℃。设置惯性释放卡片,增加虚约束保证分析结果的可靠性[7-10]。温度载荷为35 ℃时整体结构有限元分析结果,如图5 所示。主镜部件有限元分析结果如图6 所示。提取主镜反射面有限元分析结果用于面形分析。
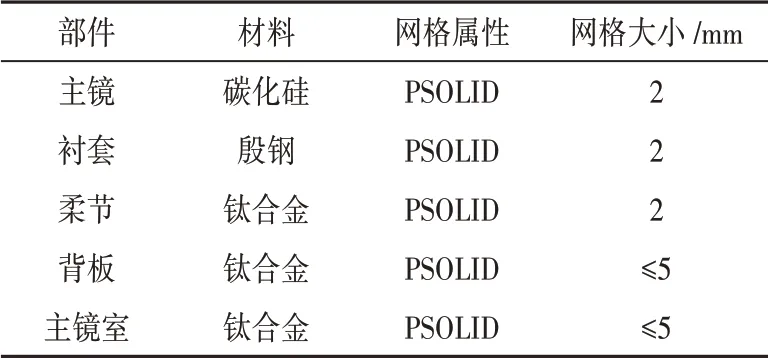
表1 各个部件材料及网格属性Tab.1 The material and mesh properties of all parts
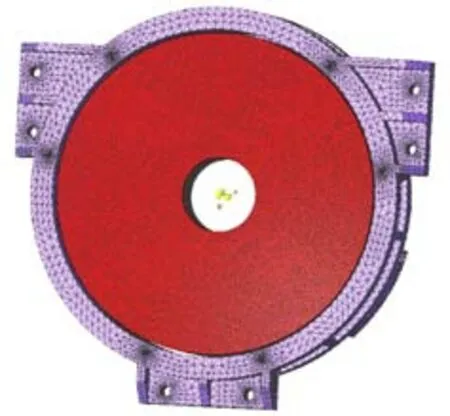
图4 网格划分结果Fig.4 The result of meshing
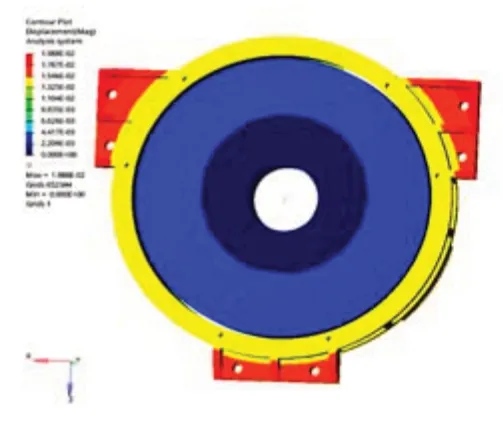
图5 35 ℃时整体结构有限元分析结果Fig.5 Finite element analysis results of overall structure at 35℃
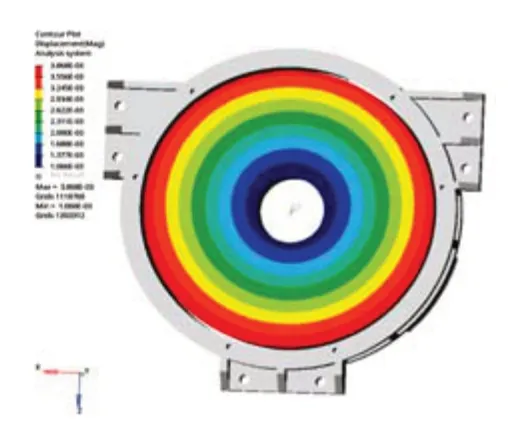
图6 35 ℃时主镜部件有限元分析结果Fig.6 Finite element analysis results of primary mirror at 35℃
2.2 面形拟合分析
在拟合光学面形前需要计算光学表面刚体运动。一组网格节点表示的光学曲面,表面的刚体运动包括3 个平移量(Tx,Ty,Tz)和3 个倾斜量(Rx,Ry,Rz)。由于光学元件在6 个方向的刚体运动,在一个给定节点(xi,yi,zi)产生的节点刚体位移(dxi,dyi,dzi),可由式(1)表示:
带有位移信息的节点拟合光学曲面,其波相差通常使用Zernike多项式描述[11-12]。

式中:m和n为非负整数;φ为方位角;ρ为径向距离,值域(0,1);
本文基于Zernike 多项式和主镜反射面节点变形拟合主镜反射面面形,面形拟合时需要移除离焦量。温度载荷为35 ℃时主镜反射面面形拟合结果如图7 所示。拟合结果中深色的3 点代表柔节处产生的像散,与实际装调结果相符。
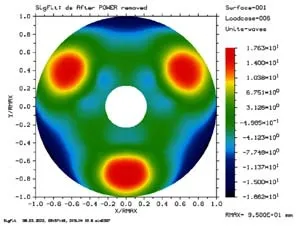
图7 35 ℃时主镜面形拟合结果Fig.7 The fitting result of the primary mirror surface at 35℃
各个温度载荷下的主镜反射面面形均方根值(RMS)及各个方向的位移和倾斜量如表2所示。以20 ℃为中心,每升高(或下降)5 ℃,RMS值变化约2.5 nm。
3 卡塞格林系统优化设计
小于ϕ300 mm 口径的主镜不必使用三点支撑,中心支撑的方式可以完全满足要求,如图8 所示。综合考虑材料的机械性能和经济合理性,有针对性地选择结构材料。主镜材料改为硅。虽然硅的力学性能稍微弱于碳化硅,但是也满足使用要求。另外,硅具有热稳定性好、加工周期短、密度低的特点。主镜支撑方式改为中心支撑,主镜的结构也做出相应改变,取消衬套,直接使用殷钢材料的柔节,直接与主镜以胶粘的形式连接。其他零件的材料和连接方式不变。优化后系统总质量3.1 kg,20 ℃主镜安装后的波相差1∕35 λ,如图9所示。
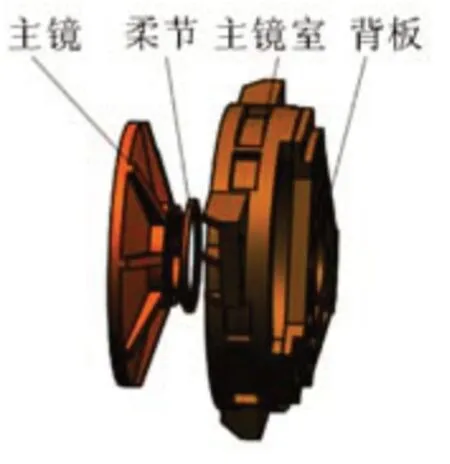
图8 优化后的系统结构Fig.8 Optimized system structure
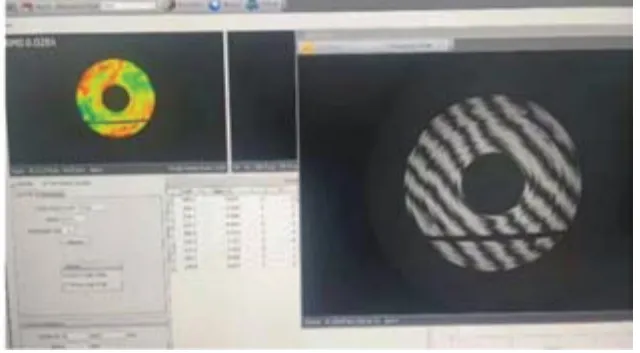
图9 优化后的主镜检测图Fig.9 The optimized primary mirror detection map
对新模型进行光机热集成分析。主镜和柔节划分2 mm 大小的网格,属性为SOLID。其他零件划分小于5 mm 的网格,属性为SOLID。加载5~35 ℃的温度载荷,间隔5 ℃。设置惯性释放卡片,增加虚约束。温度载荷为35 ℃时有限元分析结果,如图10所示。主镜部件有限元分析结果如图11所示。温度载荷为35 ℃时主镜反射面面形拟合结果如图12所示。

图10 35 ℃时优化后整体结构有限元分析结果Fig.10 Finite element analysis results of overall structure after optimization at 35 ℃
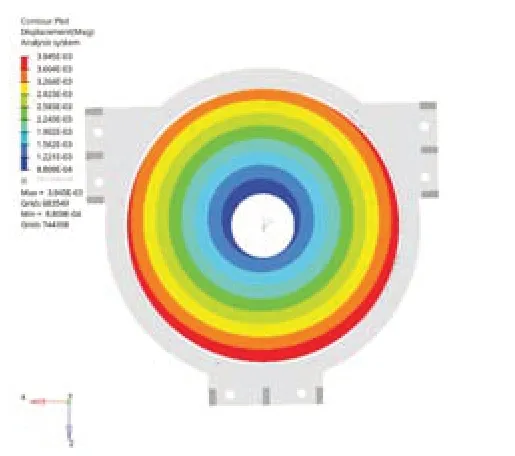
图11 35 ℃时优化后主镜部件有限元分析结果Fig.11 Finite element analysis results of the primary mirror after optimization at 35 ℃
各个温度载荷下的主镜反射面面形均方根值(RMS)及各个方向的刚体位移和旋转量,如表3 所示。以20 ℃为中心,每升高(或下降)5 ℃,RMS 值变化约3.9 nm。与优化前相比较,系统结构对温度的敏感程度略微提高,但是对成像质量无明显影响。
4 结束语
本文对卡塞格林系统中的主镜结构进行了结构优化及仿真。使用光机热集成仿真分析的方法,分析卡塞格林系统对温度的敏感程度。每温升(或温降)5 ℃,主镜反射面RMS 变化了2.5 nm。根据分析结果优化主镜结构和主镜支撑结构,改变主镜材料,改变支撑结构,降低了0.5 kg 的系统质量。分析优化后的卡塞格林系统对温度的敏感程度,优化后的主镜反射面每温升(或温降)5 ℃,RMS 变化了3.9 nm。虽然系统结构对温度的敏感程度略微提高,但是对成像质量没有重大影响。实现了既保持系统对温度的敏感程度,又减轻质量的目标。
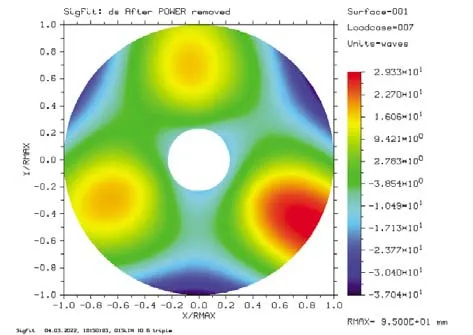
图12 35 ℃时优化后主镜反射面面形拟合结果Fig.12 Surface fitting results of the primary mirror reflecting surface after optimization at 35 ℃
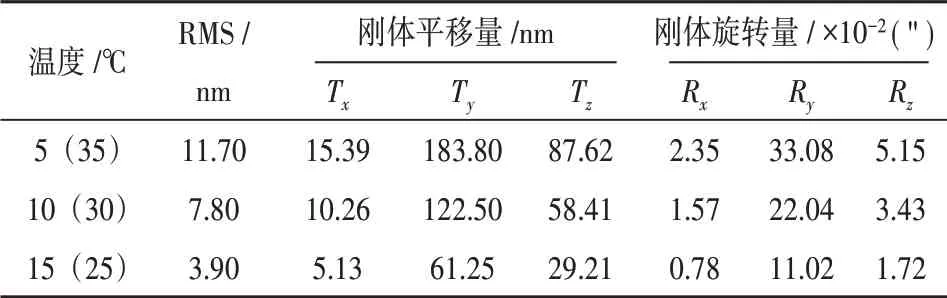
表3 各个温度载荷的主镜反射面面形均方根值(RMS)(优化后)Tab.3 The RMS of primary mirror reflector surface for each temperature load
猜你喜欢
应用光学(2023年3期)2023-06-05 09:21:56
航天返回与遥感(2022年3期)2022-07-07 05:13:36
电子技术应用(2021年1期)2021-01-22 09:45:06
航天制造技术(2020年5期)2020-11-10 08:46:38
天文学报(2020年5期)2020-09-28 02:08:34
航天返回与遥感(2018年2期)2018-05-17 09:37:57
光学精密工程(2016年11期)2016-12-19 02:30:19
光学精密工程(2016年7期)2016-08-23 06:36:49
无线电通信技术(2015年3期)2015-12-23 11:37:02
激光与红外(2014年8期)2014-03-20 08:50:22