某多发直升机自转着陆试飞方法
2022-06-22 02:23王道明袁罗庚刘建礼徐玉貌
直升机技术 2022年2期
王道明,袁罗庚,刘建礼,徐玉貌,王 滨
(1.中国陆军航空兵试飞大队,江西 景德镇 333000;2.中国直升机设计研究所,江西 景德镇 333001)
0 引言
自转飞行是直升机的主要特点之一,是一种可操纵的、最快的下降飞行方式。在发动机失效、发动机喘振和尾桨失效等突发情况下,为保证飞行安全和最大程度降低损失,通常需要通过自转的方式着陆。因此,大多数军用直升机的飞行品质规范以及民机适航条例对直升机的自转能力均有明确要求:在正常巡航时,全部动力失效后,必须能在修整过的场地上进行安全着陆。该要求是为了保证在发动机故障状态下,飞行员采用一般的驾驶技术就能保证直升机飞行安全。然而,直升机自转飞行也具有一定的风险,经常造成伤害事故。美国陆军安全中心进行的事故统计结果显示,自转着陆造成直升机损伤或人员伤亡的概率超过27%。
从20世纪50年代中期开始至80年代初,美国陆军采用AH-1G和TH-55A等直升机进行了大量的自转着陆试飞研究,掌握了较成熟的试飞方法。到80年代后期至今,国外自转着陆的研究重点已转向最优操纵和最优控制等方向。但是国内直升机自转着陆试飞的研究不多:20世纪70年代曾用直5进行过自转着陆试飞;21世纪初中国飞行试验研究院牛永红等人通过对直11自转特性和自转着陆的试飞,研究了自转着陆的进场着陆阶段下降率控制方法。
由于自转着陆试飞风险较大,在国内直升机研制过程中很少进行自转着陆接地试飞,且国内飞行员尚未开展多发直升机真实的自转着陆接地试飞,缺乏成熟的自转着陆试飞方法和试飞经验,导致国内民用直升机在适航取证时通常需要聘请国外飞行员来完成该项试飞。
为评估多发直升机的自转着陆能力和操纵程序,掌握自转着陆试飞方法,本文以某多发直升机(简称试飞机)为研究对象,基于该型机的全机设计状态,开展了自转着陆试飞可行性分析和风险分析,建立了一套较完整的自转着陆试飞方法,并通过试飞验证了方法的有效性。
1 自转着陆试飞风险分析
影响自转着陆试飞安全的主要风险因素包括:飞行高度和空速、自转特性、试飞操作技术、相关系统使用限制等。为了降低试飞风险,本章针对这些主要风险因素开展风险分析。
1.1 飞行高度和速度
直升机飞行时,存在一个飞行高度和速度的组合区域,如果在该区域飞行时全部发动机失效,直升机无法以小于起落架允许的最大着陆速度安全自转着陆,该区域称为回避区。为了保证自转着陆的安全,直升机应避免在回避区飞行。本文采用文献[6]中的方法,评估了试飞机在基本设计重量状态下所有发动机同时失效时的回避区,结果见图1。
由图1可见,试飞机由于自转能力弱,回避区较大,若起飞时考虑所有发动机同时失效,起飞通道很窄,很难避开回避区完成起飞。这也是多发直升机设计时通常只考虑单发失效回避区的原因。
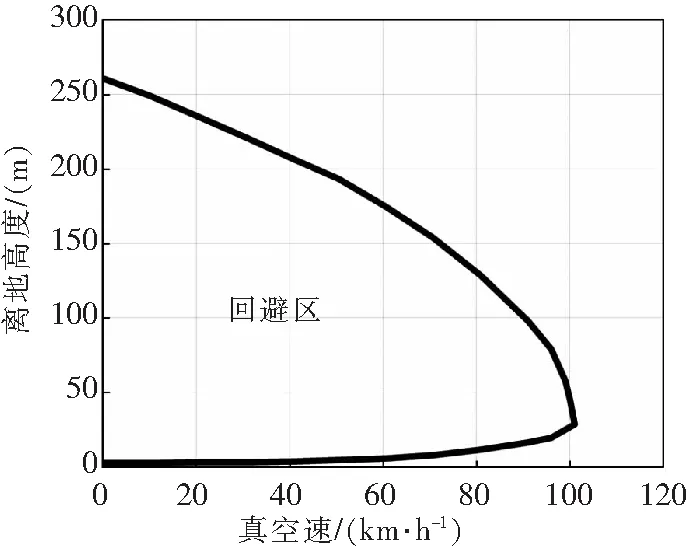
图1 回避区(高度H=0 m、标准大气ISA)
1.2 自转特性
直升机自转特性包括发动机失效后旋翼转速的衰减量、自转最小下降率和对应的速度、自转指标等。良好的自转特性使直升机在发动机失效后可安全地过渡到自转状态,并能以不大于起落架允许的水平和垂直速度安全自转着陆。本文采用文献[7]中的方法,评估了试飞机相应自转特性,结果如下:
1.2.1 旋翼转速的衰减量
若发动机突然失效后的旋翼转速衰减量过大,就可能无法通过操纵恢复到所需的转速,直升机也就难以安全地过渡到自转状态。由图2可知,试飞机发动机突然失效后当飞行员不进行总距操纵时,直升机初始飞行扭矩越高,旋翼转速衰减越快。初始扭矩为80%时, 1 s后旋翼转速衰减至85%,2 s后衰减至74%;初始扭矩为50%时,1 s后旋翼转速衰减至90%,2 s后衰减至81%。对于满足发动机隔离要求的多发直升机,发动机失效时工作的最大扭矩只需要考虑单发工作30 min功率状态(或OEI连续功率状态)对应的最大扭矩,使用1 s的飞行员滞后时间或正常的飞行员识别时间(取较大值)。试飞机单发工作30 min功率状态最大总扭矩为50%,取1 s的飞行员滞后时间,计算得到的1 s后旋翼转速衰减至90%,高于自转时旋翼最小转速,因此是安全的。

图2 旋翼转速衰减量
1.2.2 自转最小下降率和对应的速度
由图3可知,海平面标准状态、基本设计重量、100%旋翼转速自转时最小下降率为10.6 m/s,对应真空速为130 km/h。可以看出,保持上述状态,在真空速120 km/h~140 km/h之间自转时,下降率变化很小,说明实际飞行时可以采用真空速120 km/h~140 km/h进行自转,以获得较小的下降率。

图3 自转时真空速和下降率的关系
1.2.3 自转指标
有些直升机进行自转着陆对飞行员的技术要求很低;而有些直升机,即使熟练的试飞员进行自转着陆也是危险的。国外研究表明,采用当量悬停时间(旋翼在失速前使用直升机悬停需用功率消耗旋翼动能所花费的时间)作为自转指标来评估直升机的自转能力,与飞行员的定性评估最吻合。当量悬停时间越大,表明直升机自转性能越好。试飞机最大起飞重量当量悬停时间计算结果为0.8,基本设计重量为1.07,分析认为可以满足多发直升机自转性能要求,但当量悬停时间偏小,比单发直升机的当量悬停时间小较多。国外研究认为单发直升机通常要求达到1.5才比较满意。这主要是由于多发直升机自转能力要求要低于单发直升机,也是导致多发直升机进行真实自转着陆风险较大的原因。
1.3 试飞操作技术
发动机空中停车到着陆的整个过程,飞行员的正确操纵对于自转着陆安全非常关键。试飞操作风险主要在自转进入和自转着陆阶段,具体如下:
1.3.1 进入阶段
发动机突然失效到飞行员开始下放总距的滞后时间太长,或者旋翼系统转动惯量太小,导致发动机失效后旋翼转速过低,直升机操纵功效不足,从而发生危险。
发动机置于“慢车”位后,旋翼转速下降的速率与飞行员反应时间,旋翼系统转动惯量和初始扭矩(或总距初始位置)等有关。为降低试飞风险,飞行员反应时间和总距初始位置可以循序渐进。
1.3.2 着陆阶段
着陆阶段涉及拉平减速、推平提距和地面滑跑等复杂动作的组合操纵,完成时间很短,且近地面,操纵输入后来不及进行修正,需要飞行员熟悉操作程序并熟练掌握操作时机和幅度,难度较大,稍有不慎容易出事故。
1) 拉平减速的离地高度不合适。过高的高度,拉平需要保持较长时间才能过渡到瞬时增距时的高度,旋翼转速会相应减小,下降率也会增大;过低的高度,拉平难以减速到要求的速度和下降率。
2)拉平减速机身姿态不合适。机身姿态过大,一方面不利于飞行员视野,另一方面不利于下一步摆平直升机姿态;机身姿态过小,减速过慢,也不利于减小下降率。
3)使用的旋翼转速不合适。旋翼转速太低,不利于自转时利用旋翼储备的能量;旋翼转速太高,拉平减速过程容易超过无动力最大旋翼转速。
4) 上提总距时的高度不合适。高度太高,直升机提距后达到较小的下降率可能还未接地,随后接地时下降率会增加;高度太低,提距动作还未完成,下降率还未降低到期望值,直升机已经接地。
5)接地及滑跑减速过程操作不当。接地时没对准跑道,使直升机冲出跑道;接地后周期变距没及时保持中立,使旋翼打尾梁或直升机发生侧翻等。
1.4 相关系统限制
自转着陆是一种特殊的飞行状态,整个过程旋翼转速变化范围很大,且着陆时的水平和垂直速度较大,有可能超过旋翼、传动和起落架等系统载荷限制,还可能因在临界转速飞行出现动力学问题或超过电源系统能正常工作的转速范围等。通过对试飞机发动机、传动系统、动力学、电源系统、结构强度等可能影响自转着陆安全的系统进行分析,给出试飞机自转着陆过程使用限制如下:
允许的最大着陆滑跑速度为80 km/h,基本设计重量最大下降率为2.44 m/s,最大重量最大下降率为1.83 m/s;自转时稳态旋翼转速允许范围为90%~105%,瞬态旋翼转速允许范围为85%~120%。
2 自转着陆试飞方法和流程
基于风险分析结果,考虑试飞机自转能力弱和国内飞行员自转着陆试飞经验不多等情况,为进一步降低试飞风险,本章提出了包含完整试飞训练内容(自转着陆关键数据试飞、空中模拟自转着陆试飞、模拟自转着陆接地试飞、自转着陆接地试飞)的自转着陆试飞方法。试飞流程如下:
1)首先开展自转着陆关键数据试飞,为自转着陆程序的优化提供自转下滑速度、旋翼转速、拉平高度和角度等关键数据;
2)然后采用优化后的自转着陆程序开展空中模拟自转着陆试飞,空中检查自转着陆程序和直升机的减速能力;
3)基于空中模拟自转着陆试飞情况,完成模拟自转着陆接地试飞,检查自转着陆程序接地的可行性;
4)最后根据模拟自转着陆接地试飞情况,开展自转着陆接地试飞,确认直升机自转着陆能力和自转着陆程序的可行性。
2.1 自转着陆关键数据试飞方法
国内军用直升机自转着陆程序使用的关键数据通常根据经验给出,没有系统开展过该项试飞研究。
影响自转着陆安全的关键数据主要有:发动机失效后旋翼转速的衰减量,最小自转下降率及对应速度,自转着陆拉平效应(高度、速度、下降率的变化量)。其中最小自转下降率及对应速度的试飞方法比较简单,这里不赘述,仅描述其它关键数据的试飞方法。
2.1.1 旋翼转速衰减量试飞
直升机离地高度1000 m,以单发工作30 min功率平飞(如可用功率不足则下降飞行),将最后一台发动机置于慢车位,飞行员滞后约1 s再减小总距,维持旋翼转速100%,稳定自转约20 s以上,将发动机恢复至正常状态飞行。评估发动机失效1 s后的旋翼转速衰减量,评估整个飞行过程旋翼转速是否低于允许最小旋翼转速。试飞时可先从小功率开始逐步增加到30 min功率;发动机失效后飞行员滞后时间逐步增加到1 s(视情可增加到2 s),以降低试飞风险。
2.1.2 拉平效应试飞
直升机离地高度1000 m,速度下降,以指定旋翼转速稳定自转下滑,分别进行15°、20°、25°拉平减速试飞,当拉平效应消失和直升机开始下沉后,推杆减小仰角后改出。获得拉平过程中高度、速度、下降率的变化量,可通过放总距进行模拟自转试飞,也可采用发动机慢车状态自转试飞。根据需要可调整速度和旋翼转速进行试飞,以评估其影响,为最终自转着陆选择较佳速度和旋翼转速提供数据。
2.2 空中模拟自转着陆试飞方法
直升机离地高度700 m~1000 m,以指定速度下滑;放总距使旋翼转速与发动机转速脱开,控制旋翼转速稍大于额定转速稳定下滑;在预定的高度开始拉平,使直升机获得要求的仰角;减小速度和下降率,在模拟接地前的高度调整好着陆姿态;上提总距减小接地速度(若提距量过大,旋翼转速可能下降较多,故该步骤可根据飞行员的经验视情开展);然后恢复到正常飞行。
其中下滑速度、拉平高度、拉平仰角等关键数据需根据2.1节的试飞结果确定。
2.3 模拟自转着陆接地试飞方法
离地200 m以上,采用的试飞方法与2.2 节类似,只是在程序最后补充“滑跑着陆,接地后驾驶杆中立,总距低距”相关着陆后的操作程序。
2.4 自转着陆接地试飞方法
离地约200 m以上,以指定速度下滑;下放总距稳定下滑后,将发动机置于慢车位;保持要求的旋翼转速稳定下滑;在预定的高度开始拉平,使直升机获得要求的仰角,减小速度和下降率;接地前调整好着陆姿态,上提总距减小接地速度,滑跑着陆;接地后驾驶杆中立,总距低距。
除旋翼转速根据2.1节的试飞结果确定外,其中下滑速度、拉平高度、拉平仰角等关键数据同2.3节。
3 自转着陆试飞验证
3.1 自转着陆关键数据试飞
本章开展自转着陆试飞方法的验证。为降低风险,试飞机起飞重量略小于基本设计重量。
本节重点开展拉平效应和最小下降率试飞,拉平过程的时间4 s~6 s,结果见图4-图8。
1)由图4可知,采用不同拉平仰角,直升机高度下降差异不明显,高度变化基本在25 m~30 m之间,加上后续着陆需约5 m的推平提距高度,自转着陆时拉平高度可采用30 m~35 m。
2)由图5-图6可知,拉平仰角越大,空速减小越多,拉平后下降率越小,因此从直升机减速的角度,拉平仰角越大,越容易实现减速自转,但飞行员操纵难度更大,综合分析选定20°~25°作为自转着陆拉平仰角。
3)由图7可知,拉平仰角越大,旋翼转速增加越大,拉平仰角在15°~25°变化时,旋翼转速增加约3%~6%。
4)理论分析和试飞结果均表明,最小下降率速度与最佳爬升速度接近,因此为获得较小的下降率,通常以进行自转。图8给出了不同旋翼转速以速度进行自转试飞得到的最小下降率,可知旋翼转速越小,自转下降率越小,在稳态允许自转转速范围90%~102%内,自转下降率差异很小。考虑自转着陆推平提距阶段需要利用旋翼的旋转动能来减小直升机下降率,故在稳定自转下降率差异不大的情况下,采用较高的旋翼转速自转是有利的,因此推荐采用旋翼转速100%±3%进行自转,其中3%是考虑飞行员实际自转飞行时旋翼转速会有波动。
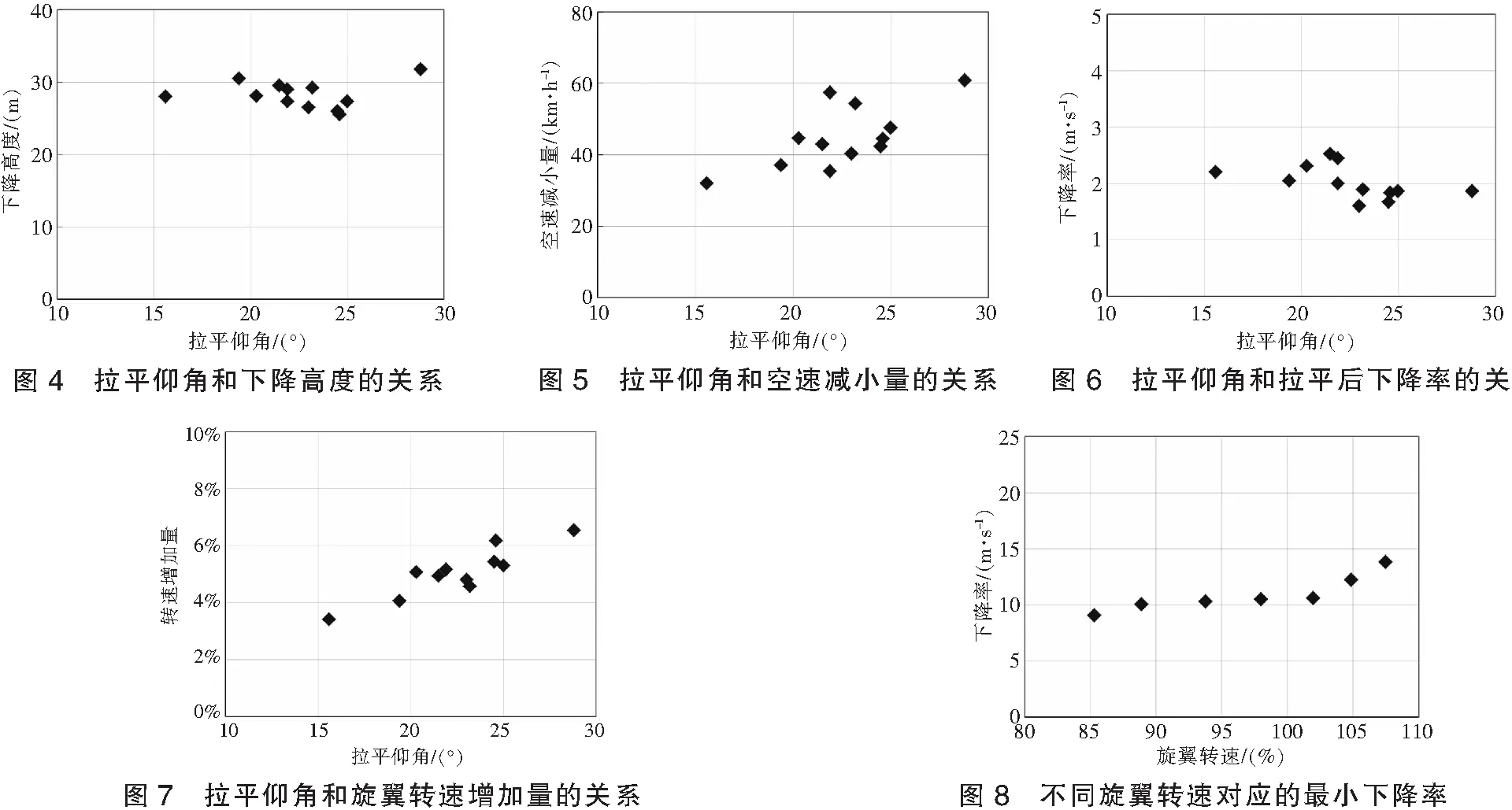
综合上面的分析结论,可得到试飞机自转着陆程序中推荐的自转着陆参数为:自转下滑速度使用速度VY、拉平高度30m~35m、拉平仰角20°~25°、旋翼转速100%±3%。
3.2 空中模拟自转着陆试飞
采用推荐的自转着陆程序进行了空中模拟自转着陆试飞,拉平后直升机速度和下降率均小于起落架允许的限制,表明直升机具备安全自转着陆能力。
3.3 模拟自转着陆接地试飞
根据空中拉平后的下降率在2 m/s左右,考虑推平提距时间约为3 s~5 s,按平均下降率1.2 m/s估算,可在4 m~6 m开始推平提距操作。
按推荐的操作程序共进行了8次试飞,接地时直升机速度均不大于50 km/h,下降率不大于0.3 m/s,均在使用限制范围内。由于发动机在飞行位,着陆提距后发动机会有功率传输到旋翼,对自转着陆是有利的,因此与真实发动机失效后的自转着陆会有差异。
3.4 自转着陆接地试飞
根据对模拟自转着陆接地试飞结果的分析,认为即使不考虑着陆提距后发动机有功率传输到旋翼带来的下降率减小量,直升机着陆速度仍小于起落架允许的着陆速度限制,因此可以安全地开展自转着陆接地试飞。共完成了3次自转着陆接地试飞,接地速度均不大于50 km/h,下降率不大于0.5 m/s。图9给出了其中1次的试飞时间历程曲线,主要操作过程和试飞结果如下。

图9 自转着陆接地试飞时间历程曲线
3.4.1 拉平减速过程
在离地高度30.5 m,总距杆保持不动, 1.1 s内将周期变距杆向后拉53 mm,使直升机抬头减速,随后逐步推周期变距杆,避免直升机抬头过大,整个拉平减速过程用时4.4 s。拉平减速过程各参数变化见表1。可知,通过拉平减速过程可使直升机地速减到62 km/h,下降率减到1.9 m/s,可以满足起落架允许的着陆速度要求。

表1 拉平减速过程参数变化
3.4.2 推平提距过程
在离地高度4.5 m,3.4 s内将总距由23%增加到68%,同时推周期变距杆减小直升机姿态;接地时直升机旋翼转速为82.2%,俯仰角3.2°,地速46 km/h,下降率0.3 m/s。推平提距过程参数变化见表2。

表2 推平提距过程参数变化
3.4.3 接地滑跑过程
接地后总距增加到最大72%,然后减小到23%,周期变距杆中立,旋翼转速最低下降到68.7%,随后恢复到慢车转速78%左右滑跑。
由于将发动机置于慢车位,而该机慢车时旋翼转速稳定在78%左右,由前面分析可知,接地时旋翼转速为82.2%,即在自转着陆试飞过程直至接地时旋翼转速均高于慢车旋翼转速,且没有功率传输到旋翼,与真实发动机失效后的自转着陆相同。试飞结果可以表明直升机自转着陆能力。
4 结论
本文针对某多发直升机,开展了自转着陆风险分析方法和试飞方法研究,并进行了试飞验证,主要结论如下:
1)该机最大起飞重量当量悬停时间为0.8,基本设计重量为1.07,可以满足多发直升机自转着陆性能要求,但当量悬停时间偏小,比单发直升机的自转能力弱;
2)在典型的拉平仰角15°~25°范围内,拉平仰角越大,空速减小越多,拉平后下降率越小,而拉平高度随拉平仰角的变化不明显;
3)采用推荐的自转着陆程序,可以将该机的自转着陆速度控制在50 km/h以下,下降率控制在0.5 m/s以下,满足自转着陆要求,表明该机具备安全自转着陆能力;
4)基于本文建立的方法,国内飞行员首次完成了多发直升机自转着陆接地试飞,表明国内飞行员已经具备开展多发直升机自转着陆试飞的能力。
由于自转着陆的安全与飞行员个人的操作习惯有关,如拉平速度,杆量大小,推杆摆平直升机的时机和速度,提距的时机等,因此使用本文的试飞方法和试飞结果应结合飞行员的操作习惯差异。
猜你喜欢
军事文摘(2022年19期)2022-10-18
环球时报(2022-09-15)2022-09-15
航空学报(2022年7期)2022-09-05
发明与创新·中学生(2022年6期)2022-05-22
科技创新与应用(2020年10期)2020-04-24
环球时报(2018-12-26)2018-12-26
航空模型(2017年3期)2017-07-28
儿童故事画报·发现号趣味百科(2017年4期)2017-06-30
第二课堂(小学版)(2009年9期)2009-11-13