无人直升机前飞抗侧风控制技术
2022-06-22 02:23姜美齐王刚强
直升机技术 2022年2期
姜美齐,王刚强,胡 淼
(中国直升机设计研究所,江西 景德镇 333001)
0 引言
相对固定翼无人机而言,无人直升机具有垂直起降和悬停、小速度飞行的能力,具备多种条件下快速机动部署和使用等优势。随着无人直升机技术的发展,如何使无人直升机在复杂环境中仍能够高效安全地执行任务是促进无人直升机发展的关键,而大风环境下的飞行控制是其中的一个主要问题。由于无人直升机具备悬停、小速度飞行的能力,纵向风并不会对飞行安全造成太大影响,而侧风则会大大降低飞行性能,影响航向通道的稳定性。
目前在工程实践中应用较为广泛的是侧滑法和侧航法两种抗风策略。这两种策略对常规布局固定翼飞机、飞翼布局飞机都能实现其稳定的抗风飞行,但仍存在一定的缺点和局限。使用侧滑法抗风会降低无人直升机的飞行性能和发动机的实际工作效率,对尾桨通道也存在扰动作用明显,甚至使尾桨通道控制量饱和等问题。而采用典型的侧航法,又依赖于精确、可靠的侧滑角信号的获取。对于无人直升机而言,既难以获取可靠的侧滑角信号,也无法单独依靠航向通道的静稳定性来实现侧航法消侧滑。
1 无人直升机系统模型
为了进行无人直升机前飞抗侧风控制研究,并设计抗侧风控制策略和控制律,首先对无人直升机系统进行简化建模。如图1所示,为地面坐标系,用于确定直升机姿态和航向:为地面选好的某点;为初始航向;为重力加速度正方向;由右手系确定。为机体坐标系,用于确定直升机在空中的姿态:为直升机重心;轴为纵轴,平行于机体构造基准线;轴垂直轴向下,且平面为机体纵向对称面;轴为横轴,垂直于平面,方向由右手系确定。建模过程中进行如下假设:
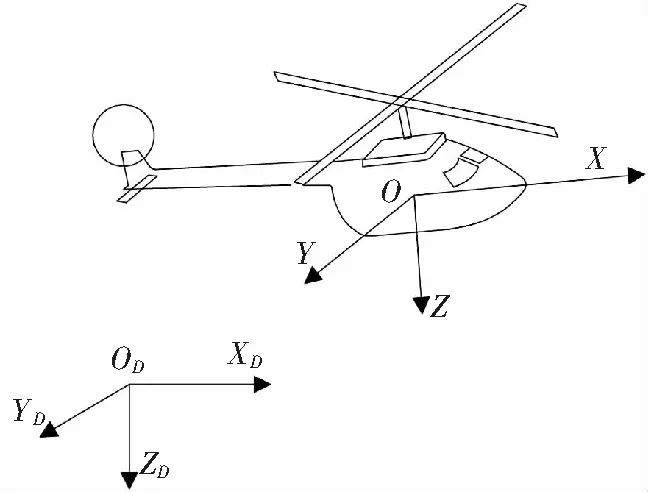
图1 直升机系统示意图
1) 忽略地球自转和公转对直升机的影响;
2) 直升机没有弹性变形;
3) 直升机各部分的质量是不变的;
4) 直升机是关于自身左右对称的。
采用小扰动线性化方法得出直升机线性化模型如式(1)所示:
(1)
其中,为系统矩阵,状态变量=[],为输入矩阵,控制输入=[],为输出矩阵。其中,,分别为俯仰角、滚转角和偏航角;,,分别为纵向速度、侧向速度和法向速度;,,分别为俯仰角速度、滚转角速度和偏航角速度;,,,分别为纵向周期变距、横向周期变距、总距和尾桨桨距。
2 侧滑抗风控制和侧航抗风控制
典型的侧滑法与侧航法抗侧风控制策略的最显著区别在于机头指向是否朝来风方向偏转。如图2所示,侧滑抗风是指无人直升机受到侧风影响后,航向角保持不变,即机头方向与地速方向保持一致,同时向来风方向额外维持一定的滚转角,使横向的水平分量与因侧风产生的侧力抵消,从而保持航迹角与指令航向一致。侧航抗风是在无人直升机受到侧风影响后,调整航向角,使机头向来风方向偏转,直到侧滑角为零,此时无人直升机机头方向与地速方向呈一定夹角,横向通道处于前飞配平状态,不受侧滑影响。侧滑抗风一方面会降低飞行品质与发动机效率,另一方面转弯时风向突变可能导致航向通道控制品质下降甚至控制量饱和。侧航抗风可以有效避免侧滑法带来的问题,但依赖于侧滑角信号的获取。如何获取真实准确、高精度、低扰动的侧滑角信号一直是工程上的一个难点。无人直升机的工作场景多处于低速包线范围内,同时旋翼下洗气流影响等因素更增加了可靠的侧滑角信号的获取难度,因此工程上大多数无人直升机不以侧滑角作为控制输入量,甚至不配备侧滑角传感器。如何在不具备侧滑角传感器的情况下实现侧航法抗风控制,是将侧航法应用于无人直升机抗侧风控制工程实际的主要问题。本文提出的基于侧向过载补偿的控制策略可以实现这一目标。
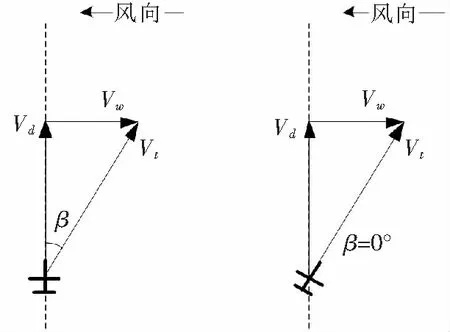
图2 侧滑法和侧航法示意图
3 侧向过载补偿抗风控制
由于侧向过载与侧滑角存在如式(2)的关系,因此可以考虑使用侧向过载信号替代侧滑角信号进行航向通道的控制。
=+
(2)
其中,为测得的侧向过载,为侧力导数,为侧向过载配平量。
在无人直升机横向通道配平准确,即侧向过载配平量准确的情况下,机体轴系下侧向过载的变化能够真实地反映出侧滑角的变化。只要通过设计航向通道控制器和横向通道控制器使得侧向过载稳定在配平值上,即可消除侧向风引起的侧滑。
3.1 航向通道控制器
航向通道控制器结构如图3所示。
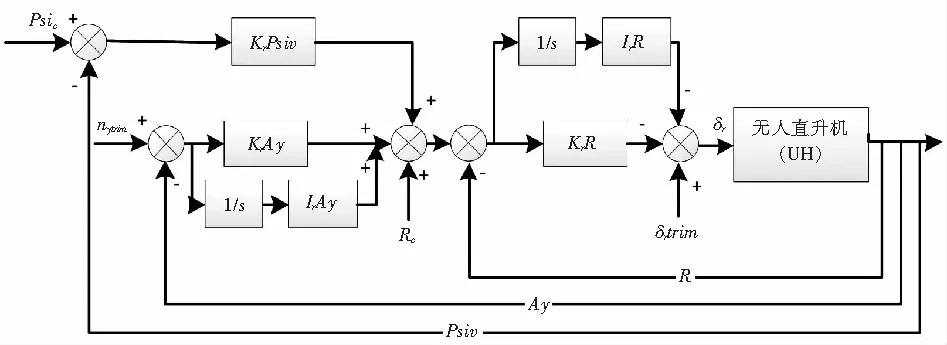
图3 航向通道控制结构示意图
航向通道控制器主要由航向角速率控制、航向角控制以及侧向过载补偿控制三部分构成。其中内环采用航向角速率的PI控制,外环为航向角的P控制,侧向过载的PI控制作为角速率指令补偿。在无侧风情况下,侧向过载补偿量为0,航向角和航迹角都跟踪指令航向。当受到侧风影响,侧向过载偏离配平值时,侧向过载补偿部分给出航向角速率指令,控制机头向来风方向偏转,以消除侧滑;同时航向角控制部分继续控制航迹角跟踪指令航向,实现航迹稳定飞行。
航向通道控制律如式(3)、式(4):
(3)

(4)

3.2 横向通道控制器
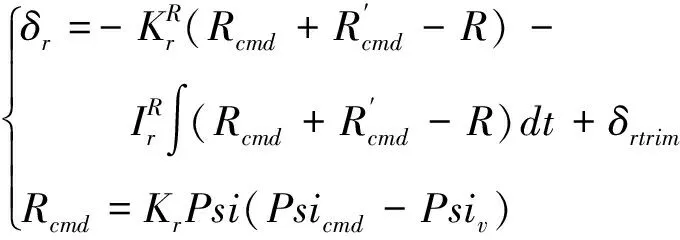
横向通道控制结构如图4。
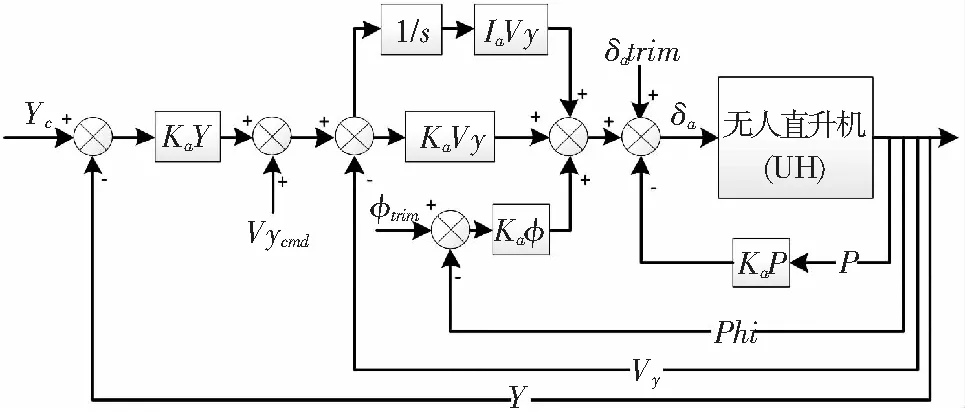
图4 横向通道控制结构示意图
横向通道控制器主要由内环的滚转角速率增稳项和滚转角的P控制、外环侧向速度的PI控制和侧偏距的P控制构成。在做航迹跟踪飞行时,外环根据侧向位置偏差产生侧向速度指令,通过侧向速度的比例积分控制消除侧向位置偏差,实现精确的航迹跟踪飞行。
横向通道控制器控制律结构为式(5)-式(8):
=_+_+
(5)

(6)

(7)

(8)
其中,为滚转角速度;为滚转角;为滚转角指令,前飞时,为滚转角配平量,航段交接处的协调转弯时,为式(9);为侧向速度指令;为侧向速度如式(10);为侧向位置偏差指令;为侧向位置偏差。
=arctan()
(9)
=sin(-)
(10)
对于式(10),直线段前飞时,为当前航段的目标航向;而在如图5的航段交接处的前飞转弯过程中,则为圆弧航迹切线方向。在航段交接处的转弯过程中,不断变化。航段交接处的可根据无人直升机实时位置和转弯圆弧圆心位置求出;而转弯圆弧圆心位置可通过航段P1-P2航向、P2航点位置以及转弯提前量求出。
图5 基于侧向过载的航段转弯示意图
由于采用了基于侧向过载补偿的抗风策略,在转弯过程中,即使无人直升机遭遇侧风风力和风向的快速变化,机头方向也能根据来风方向逐渐调整,消除因风向变化而产生的侧滑。而采用侧滑法时,只能依靠横向通道滚转角的强力偏转抵抗侧风影响。当侧风过强时,航迹跟踪品质将大幅下降,并且滚转坡度过大可能导致掉高,甚至发生危险。
4 仿真验证
以某型无人直升机数字仿真环境为平台,进行航线飞行仿真试验。注入风速为12 m/s的正北风,无人直升机沿航迹方向依次为180°,270°, 0°,90°的矩形航线以20 m/s空速做航迹跟踪飞行。要求无人直升机功能正常,且航线保持精度为±30 m。
如图6所示,在整个航线飞行过程中,由于侧向过载补偿控制的作用,无人直升机的航迹角始终跟踪航向指令变化,而机头指向的航向角则朝来风方向偏转一定角度。
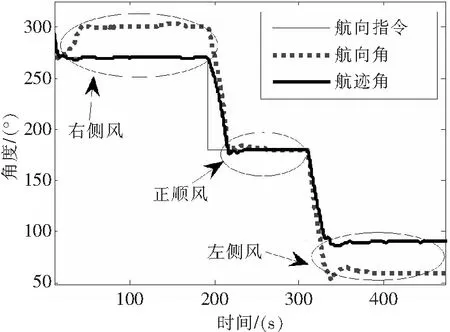
图6 侧向过载补偿控制航向通道曲线
同时,由图7的侧滑角对比曲线可知,在整个航线飞行过程中,采用侧滑法控制无法消除由外界风引起的侧滑,在正左侧和正右侧风作用时,侧滑角达到-26°和+26°。而采用基于侧向过载补偿的控制方法,则可以保持侧滑角为0,即便在转弯处由于风向突变,也能调整航向使侧滑角逐渐减小至0。
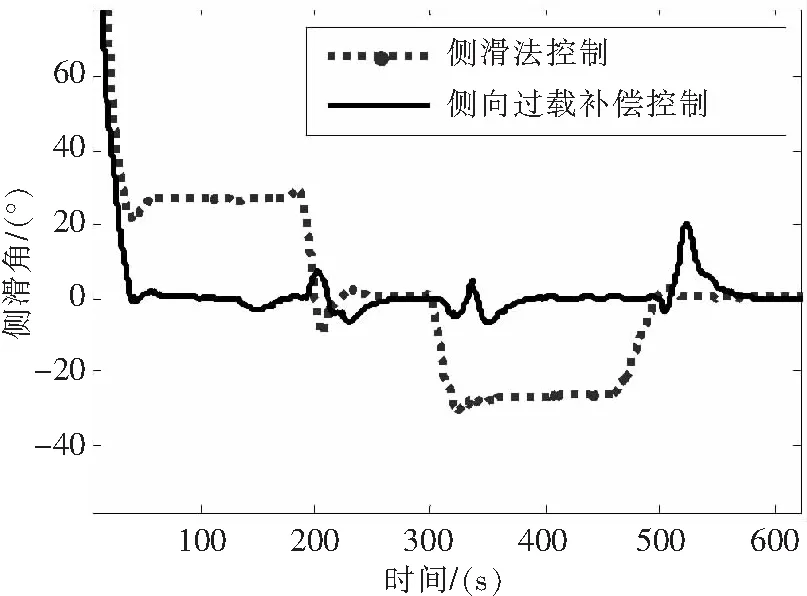
图7 侧滑角对比曲线
图8和图9为飞行航迹曲线。以第一个航段交接转弯为例,采用侧滑法时,最大侧偏距达41 m,而采用侧向过载补偿时最大侧偏距为22 m。在整个飞行过程中,无人直升机功能正常。采用基于侧向过载补偿的控制方法能够满足航线保持精度要求,减小侧偏距,提高航线跟踪精度。
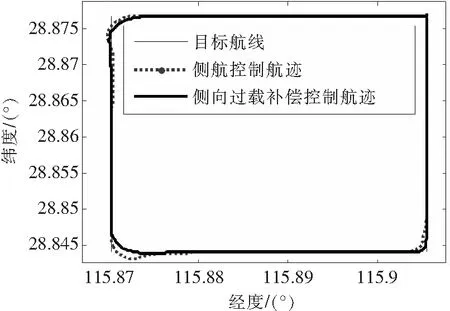
图8 飞行航迹
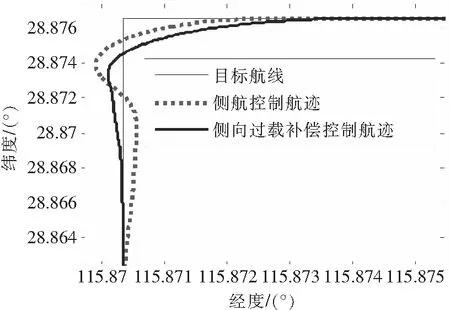
图9 航段交接处航迹
5 结束语
本文提出了基于侧向过载补偿的侧航抗侧风控制策略,设计了基于侧向过载的航向通道控制器和横向通道控制器,并进行了数字仿真试验。仿真结果表明,与侧滑抗侧风相比,所设计的基于侧向过载的抗风控制策略和控制律可以在不依赖侧滑角信号的情况下,有效消除无人直升机在侧风环境中飞行时的侧滑角并保持稳定,提升航线跟踪精度,实现无人直升机在侧风环境中安全、稳定的飞行。
猜你喜欢
航空学报(2022年9期)2022-10-14
火力与指挥控制(2022年8期)2022-09-16
现代计算机(2022年3期)2022-04-22
中国科技纵横(2020年9期)2020-10-09
教学与管理(小学版)(2020年5期)2020-07-16
师道(2018年6期)2018-07-16
科技视界(2016年19期)2017-05-18
珠江水运(2015年11期)2015-07-24