
基于轨迹实时追踪算法测量液体黏度
2022-06-20 13:44黄斯韵陈嘉鑫曹芸芸朱安萍赵肖彤
物理实验 2022年4期
张 纾,黄斯韵,陈嘉鑫,曹芸芸,朱安萍,赵肖彤,沈 环
(华中农业大学 理学院,湖北 武汉,430071)
液体黏度是表征液体自身特性的重要参量,是描述液体内摩擦性质的重要物理量. 液体黏度的测量在医疗、航空、水利、机械润滑和液压传动等领域有广泛应用,在微观上对生物分子比如细胞、染色体、蛋白质等的力学性质的研究也有非常重要的意义[1-3]. 目前,常用的测量方法有毛细管法、奥氏黏度计法、落球法、转筒法等[4-8],其中落球法常用于测量黏度较大的液体,比如甘油、蓖麻油、润滑油等,该方法的实验仪器简单、现象直观,常被用于大学物理实验教学.
利用落球法测液体黏度的核心环节是测量金属小球在液体中下落的终极速率. 在传统方法中,实验者用镊子夹住小球凭经验在量筒中心轴线上释放,并用秒表手动记录小球通过路程的时间,从而获得小球在液体中下落的终极速率. 传统方法过多依赖实验者的经验,除了无法准确判断小球是否从量筒中心轴线处下落,对下落路程和时间的测量误差也不可忽略.
目前,有很多科研和教学工作者对该实验仪器进行了改进,例如文献[9]采用电磁式定位架控制小球的下落位置避免人为操作引起的误差,文献[10]利用触发时间计数器进行下落时间的测量,文献[11-12]分别利用三维激光定位器、激光网面和时间计数器来测量小球的下落时间. 但以上方法只能在小球下落的终极速率区域内设置几个测量点,其对应的下落路程仍需要手动测量,并且获得的实验数据点也较少. 基于以上问题,本文对落球法测量液体黏度实验设备进行了改进,采用自制的电磁铁开关控制小球的下落位置和初速度,使用CCD采集小球下落的动态视频,再利用轨迹实时追踪算法得到小球下落的竖直位移与时间的关系曲线,获得小球在液体中的终极速率. 改进后的实验装置具有实验过程直观、操作简单、测量数据准确等优点.
1 实验装置改进
改进后的实验装置如图1所示,改进的部分主要包括3个方面:电磁铁开关控制器、轨迹实时追踪算法程序以及可视化实验操作界面. 电磁铁开关控制器由电源、开关、密绕螺线圈和磁铁棒组成. 实验中使用的小球为磁性混合材料的金属小球. 经过测试,当电源电压调试到1.5 V时,电磁铁可以很好地吸附住小球,并在断电后瞬间释放小球. 将电磁铁安放在可升降的支架上,用来调节小球的位置. 为了确保小球在量筒的中心轴线处下落,采用三维制图软件制作了与量筒外径一致的圆形盖帽,厚度约1 mm,在中心轴线分别开孔3 mm,4 mm和5 mm(分别比实验中使用的小球直径大1 mm). 实验中采用无磁性镊子将小球放置在电磁铁下方,再调节升降支架,使得小球位于量筒盖帽的中心轴线处且小球下表面与盖帽相切,以确保小球以零初速度从量筒的中心轴线处下落.
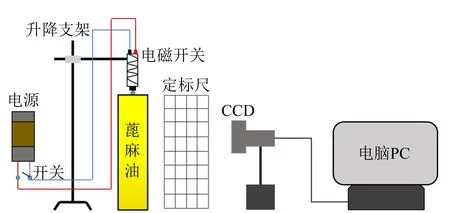
图1 改进后的测量液体黏度的实验装置图
采用CCD获得小球下落的视频,视频采集帧率为60 s-1;利用轨迹实时追踪算法CSRT获得小球在液体下落过程中的位移-时间曲线. CSRT是OpenCV(Open source computer vision library)中8种目标检测算法的1种,该算法可以通过Python等语言接口实现图像处理和计算机视觉处理. CSRT跟踪算法通过具有通道和空间可靠性的滤波器来进行物体识别和追踪,该算法支持对所选区域的一部分进行跟踪,可以确保选定区域的定位和放大,改进对非矩形区域或对象的跟踪,也可以在较低的视频帧率下工作,从而获得更高的目标跟踪精度.
在量筒的水平轴平面上放置定标刻度尺,用来从图像处理中获得小球下落的实际位移,如图1所示. 在Python语言环境下采用CSRT算法编写可视化实验操作界面,如图2所示. 可视化界面主要分为3部分:轨迹实时追踪部分、位移时间曲线展示部分、实验参量和实验结果呈现部分. 具体操作步骤为:
1)在轨迹实时追踪部分,首先选择保存的视频文件.
2)点击初始化,以避免前次实验结果的干扰.
3)初始化完成后,界面会弹出视频文件的首帧图像,圈定矩形区域作为追踪区域. 追踪区域尽量选择在量筒的中心轴线位置,比追踪目标小球略大,以确保可以全程追踪到小球.
4)点击开始追踪,呈现的画面如图2(b)所示,小球实时坐标的帧率显示在图像的左上角.
5)完成目标追踪后,点击绘制位移曲线,小球下落的位移-时间曲线会出现在主界面中.
6)选定时间区域进行线性拟合,从位移-时间曲线中获得小球下落的极限速率.
7)将实验测量的其他参量输入系统,即可直接获得液体的黏度.
该轨迹实时追踪算法能够以0.04 s的时间间隔给出小球从下落至沉落到量筒底部全过程的位移-时间曲线,数据点为100~300个.
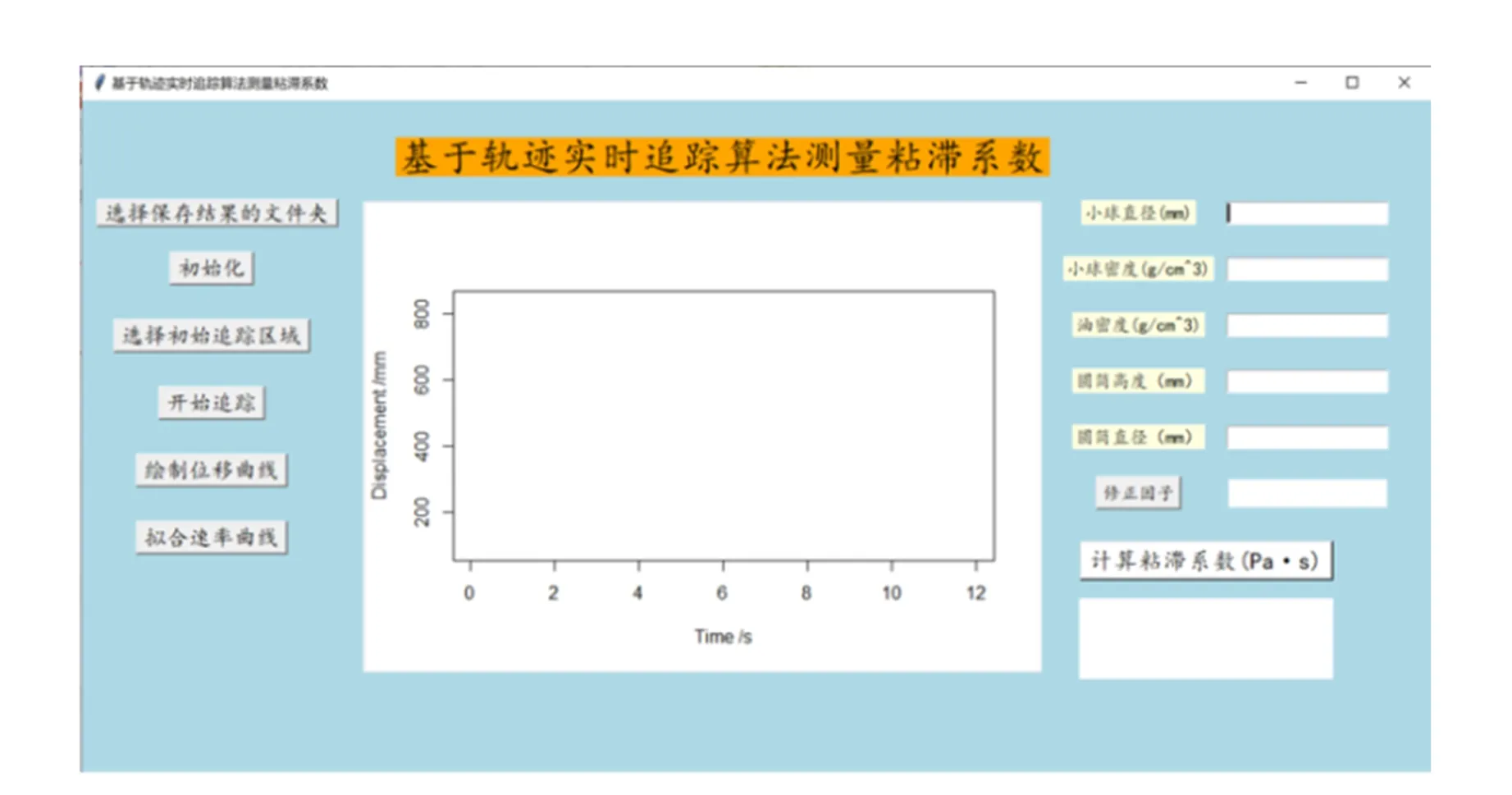
(a)基于Python语言编写的可视化操作界面
2 实验数据及分析
当光滑小球在无限深广的液体中下落时,如果小球的直径d及下落速度v均较小,并且在下落时液体不产生湍流的情况下,小球所受到液体的黏性阻力可由斯托克斯公式给出,即
f=3πηvd,
(1)
其中,η为液体的黏度.
在小球下落过程中,会受到重力、黏性阻力和浮力的作用.当小球下落速率增大到一定值时,这3个力达到平衡,小球开始做匀速运动,此时的速度大小称为终极速率,用vt表示.如果流体的密度为ρ,小球的密度为ρ′,则
(2)
由式(2)得到液体黏度为
(3)
实际实验时,小球在液体中下落并不满足无限深广和无湍流的理想条件,故式(1)应修正为
f=3πηυdk,
(4)

(5)
实验中使用的小球是直径为2,3,4 mm的磁性小球. 为获得小球的密度ρ′,使用精度为0.001 g的电子天平以及螺旋测微器分别对小球的质量和直径进行测量,测量结果如表1所示. 从表1中可以看出,直径约为2 mm和3 mm的小球密度比较接近,而直径约为4 mm的小球密度偏差较大,这可能是由于在直径大的小球中掺磁性材料的比例不同导致的. 实验中使用的蓖麻油为分析纯,未进一步提纯,测量得到蓖麻油的密度ρ=0.963 g/cm3.

表1 实际测得的金属小球的直径d和密度ρ′
实验中采用CCD获取小球下落过程的视频,利用轨迹实时追踪算法CSRT追踪小球的下落轨迹,以0.04 s的时间间隔获取小球下落位移,通过可视化操作界面直接获得小球下落的位移-时间曲线,如图3所示. 由于小球刚开始下落时还没有达到终极速率,因此在对数据采取线性拟合获得终极下降速率时,排除了小球下落0~2 s之间的数据点. 将实验获得的相关参量输入到可视化操作界面即可获得液体黏性阻力的修正因子以及液体黏度. 实验中使用的量筒直径D=24.98 mm,高度H=303.8 mm,重力加速度g=9.794 m/s2. 采用2,3,4 mm的小球所测得的蓖麻油的黏度分别为(0.627±0.003) Pa·s,(0.626±0.005) Pa·s,(0.657±0.049) Pa·s.

图3 不同直径小球在蓖麻油中下落的位移-时间曲线
实验在温度为25 ℃时进行,查表可得在该温度下蓖麻油的黏度标准值为0.630 Pa·s[13]. 当小球直径为2 mm和3 mm时,实验的不确定度较小. 随着小球直径的增加,误差也随之增加. 这主要是由于当小球直径较大时,在流体中运动的湍流现象更明显,终极速率与理想情况偏差较大而引起的. 总的来说,该实验获得液体黏度的测量结果准确、可靠,证明改进的液体黏度测量方法可以满足实验需求.
3 结束语
本文对落球法测量液体黏度实验装置进行了改进,通过自制的电磁铁开关实现对小球下落位置和初始零速度的精准控制. 此外,还利用轨迹实时追踪算法CSRT实时追踪小球下落轨迹,获得小球下落的竖直位移与时间的关系曲线,全面地显示了小球从初始零速度进入液体至沉落到底部的轨迹曲线,并利用Python软件编写了可视化操作界面,一体化呈现小球下落追踪、数据采集、数据拟合和结果. 改进后的实验装置具有实验过程直观、操作简单、测量数据准确等优点,在科学研究及大学物理实验教学领域具有一定的应用价值.
猜你喜欢
石油石化节能(2022年10期)2022-10-27
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
家教世界·创新阅读(2020年4期)2020-06-03
阅读(科学探秘)(2020年2期)2020-04-02
润滑油(2019年6期)2020-01-01
中学生数理化·教与学(2018年1期)2018-01-19
爱你(2017年2期)2017-11-24
数学大王·中高年级(2016年11期)2016-09-10
养生保健指南(2016年9期)2016-05-14
