基于无人机倾斜摄影测量的露天矿山三维建模及精度分析
——以广西为例
2022-06-08 06:44潘少炜
南方自然资源 2022年5期
王 成,潘少炜,李 岩
1.广西自然资源调查监测院,广西 南宁 530023
2.桂林理工大学测绘地理信息学院,广西 桂林 541004
矿山的资源勘查、矿山监测、储量评估等地形测绘任务需要科学有效的技术手段来保证矿产资源得以安全高效地开采[1]。以往在开展矿山地形测绘原始数据采集时,一般采用RTK 或者单基站作业方式,测绘人员经过实地测绘,完整绘制地形图后再开展设计或施工等工作[2]。这样的作业方式不仅时间长、工作量大,还易受到危险地形的限制,测绘成果的精度难以保证[3]。
将无人机倾斜摄影三维建模与矿山测绘有机地结合,不仅可以顺利解决这些问题,而且还可以为矿山周围的环境提供有效的信息和资料,提供真实的矿山环境监测与治理的地物空间信息和模型纹理数据。王果等人[4]于2017年利用无人机倾斜摄影技术对某矿山边坡进行三维重建,获取滑坡区域的长度、宽度、体积、坡度等用于监测滑坡等灾害的信息。谢洪斌等人[5]将无人机摄影测量技术应用于露天矿山监管,生成了正射影像(DOM)、数字地表模型(DSM)、三维模型等成果,估算开采分析与开采量,并将结果和其他露天矿山测量手段从精度、价格、效率、适用条件等方面做比较,结果表明该技术优势显著。
研究小组以广西某露天矿山作为研究区,利用无人机搭载高像素照相机获取矿区影像,结合外业RTK 采集控制点数据,对研究区露天矿山的三维模型构建方法以及精度评定方法进行研究和评价。
1 无人机倾斜摄影测量技术
倾斜摄影测量技术,是近景测量和航空摄影测量的改进升级技术。它解决了拍摄角度单一的问题,无人机按照设定好的航线、一定的重叠度,拍摄垂直、前、后、左、右5 个角度的倾斜影像,并结合GPS 接收机和惯性测量单元IMU 进行测量工作,其获取到的影像、POS 数据以及地面控制点坐标数据经过内业数据处理可得到测绘的“4D”产品以及三维模型等成果。
数据处理的主要技术流程包括:影像预处理、影像特征点匹配、刺点、光束法区域网平差、多视影像密集匹配、三维TIN 三角网构建、模型构建等,最后得到色彩真实、几何精度高、可测量和分析且符合矿山实貌的三维实景模型。
2 研究区和数据获取
2.1 研究区概况
此次选取实验区域为广西东兴市某露天矿山,研究区面积约为20 万m2。该矿山地形起伏大,最大高差约160 m,矿体直接露出地表,两个开采面的采矿条件较好,周边为山地、林地、耕植地且无居民区,矿山属于中小型的露天矿山,代表性强。
2.2 数据来源
研究小组利用基于无人机倾斜摄影拍摄的918 张照片(分两组,一组为459 张正射影像,另一组为459 张斜射影像),照相机型号为SONY ILCE-6000,镜头为E 20 mm,光圈值为2.8,影像大小为6 000×4 000。
2.3 数据处理方法
无人机倾斜摄影测量的主要技术方法如图1 所示。其包含以下4 个部分。
(1)外业部分:像控点布设和采集、无人机影像采集。
(2)数据整理:检查控制点坐标数据、航测影像数据、POS 数据的完整性。
(3)内业数据处理:通过软件的模拟和计算进行空中三角测量,得到预生产数据并与像控点数据进行匹配矫正(刺点),获得最终带有坐标的三维模型等产品。
(4)精度验证:对生产产品进行各项精度验证,确保达到质量要求。
3 实验结果和精度讨论
3.1 三维模型成果
研究小组从模型的整体和局部细节两方面分析基于无人机倾斜摄影技术的露天矿三维模型的精度。
整体方面(见图2),山体模型形状起伏有致,没有出现显著错误,对原始地物的形状还原效果好,和现实三维世界山体构造一致。山体由道路分层,反映出矿山的开采特征。

图2 模型工作面整体细节图
局部方面(见图3),在空间形变上,三维模型和现实照片几乎没有出入,道路弯曲程度完全一致,路边的棱角也一致,现实三维世界地面上的石头凸出明显,可见空间形状一致性较好;贴图色彩上看,模型色彩稍微厚重、整个画面较为锐利(峭壁下的影子),但与现实世界基本一致,没有出现很大变化;从完整性来看,模型图中没有出现空洞,小石头、山边石层、水坑、石坑、地面划痕等细节均能较完整地表现出来。

图3 照片和模型对比图(左图为实地照片,右图为模型图)
3.2 空中三角测量精度评价
3.2.1 像点精度评价
衡量空中三角测量加密和联合平差的结果可以使用影像像元的均方根进行评价。此次实验研究区域的像控点经过平差后,其像元的均方根为0.53 个像元,小于个像元,满足《低空数字航空摄影测量内业规范》(CH/Z3003-2010)要求。
3.2.2 像控点的精度评价
像控点的坐标值在经过空中三角测量加密联合平差解算之后发生了改变。研究小组将其和外业测量坐标值的平面及高程误差值相比较来计算中误差(见表1),中误差计算公式为:
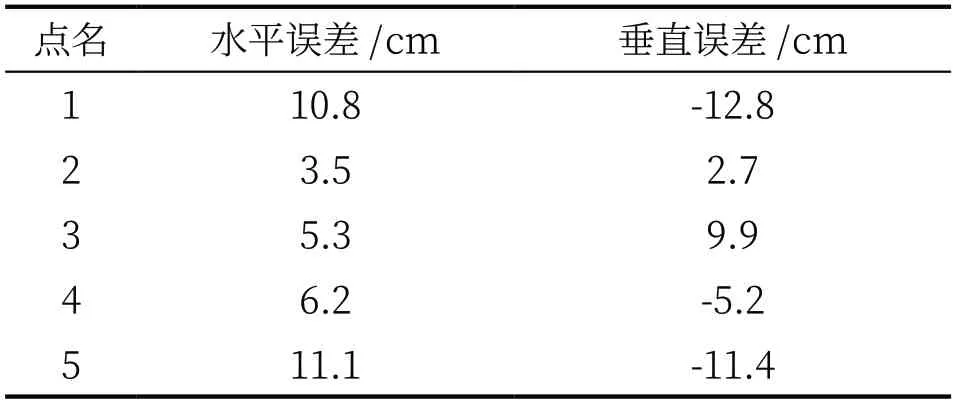
表1 像控点精度评价表
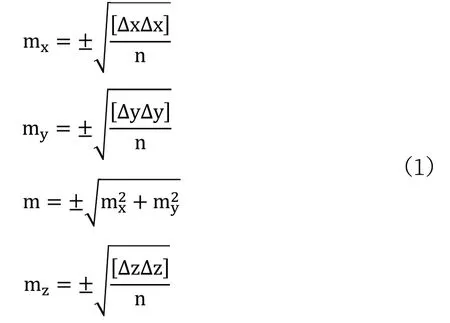
式(1)中,Δx、Δy、Δz 为x、y、z 方向上模型点坐标值与真实测量值的差值,mx、my、mz分别为x、y、z 方向上的中误差,m为平面误差。
由表1 统计可得,平面坐标中误差为±7.9 cm,最大误差为11.1 cm;垂直(即高程)中误差为±9.2 cm,误差最大值为-12.8 cm。平面和高程最大限差分别小于25cm 和35 cm,符合《数字航空摄影测量空中三角测量规范》(GB/T 23236-2009)要求。
3.3 模型精度评价
3.3.1 平面精度评价
研究小组首先对模型中的检查点数据进行提取,然后和外业实测数据进行求差,计算出x、y、z 3 个方向的残差,对模型进行精度评价。检查点的外业实测数据如表2 所示,提取检查点数据如表3 所示。由表2 和表3 计算5 个检查点在x、y、z 3 个方向上的残差,其结果如表4 所示。
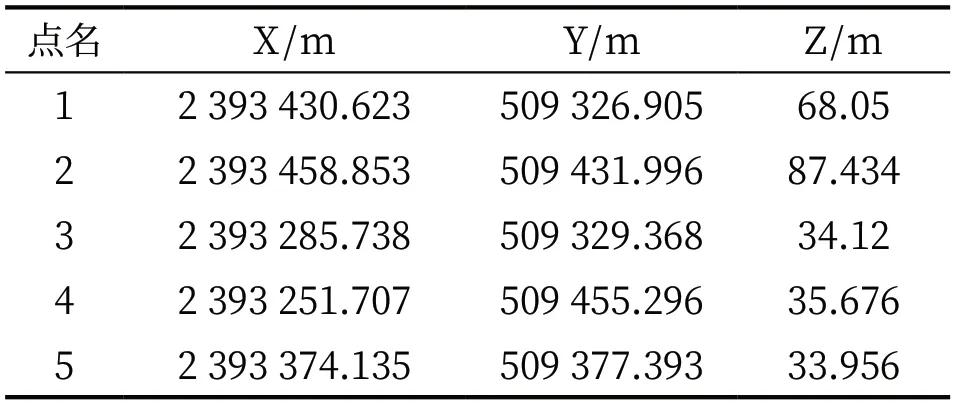
表2 外业实测检查点数据表
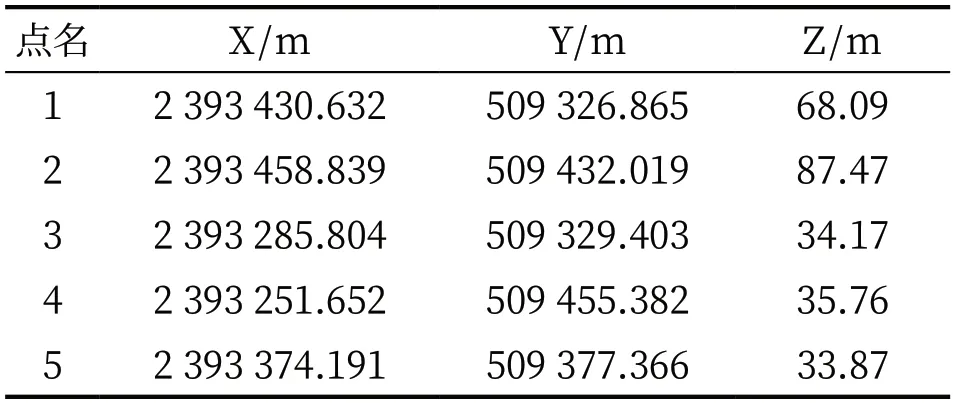
表3 提取检查点数据表
由表4 统计可知,在统计的该地区检查点中,x 方向上的最大误差为6.6 cm,中误差为±4.6 cm;y 方向上的最大误差为8.6 cm,中误差为±4.8 cm;平面最大误差为10.2 cm,中误差为6.7 cm。根据《三维地理信息模型数据产品规范》(CH/T9015-2012),比例尺为1 ∶500 的精度应控制在30 cm 以内。根据实验结果,研究区误差为6.7 cm,小于30 cm 的标准,符合规范精度要求。
3.3.2 高程精度
由表4 可知,在统计的检查点中,z 方向上的最大误差为8.6 cm,中误差为±6.3 cm,根据《三维地理信息模型数据产品规范》(CH/T9015-2012),比例尺为1 ∶500 的高程精度应控制在50 cm 以内。根据实验结果,研究区高程误差为6.3 cm,小于50 cm 的标准,符合规范精度要求。
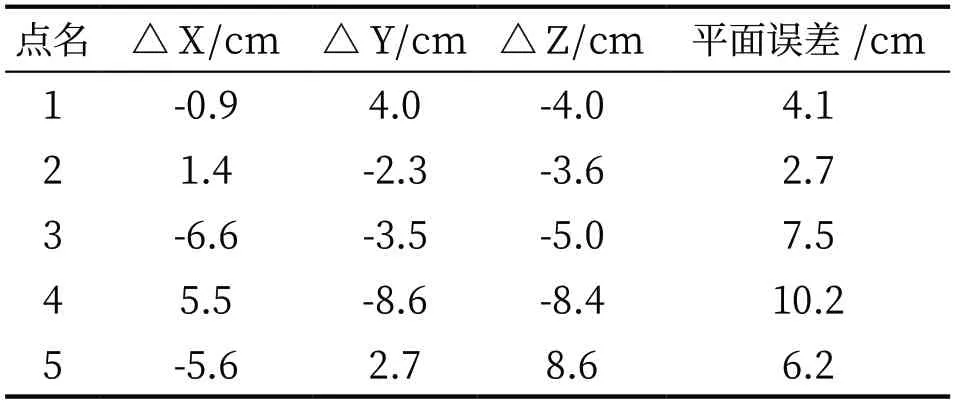
表4 三维模型检查点坐标残差统计表
综上所述,经过空中三角测量加密和联合平差后,像元的均方根为0.53 个像元;像控点在经过空中三角测量加密联合平差后与外业测量值对比,平面坐标中误差为±7.9 cm,最大误差为11.1 cm;垂直(即高程)中误差为9.2 cm,误差最大值为12.8 cm;模型平面坐标中误差为±6.7 cm,最大误差为10.2 cm;高程中误差为±6.3 cm,最大误差为8.6 cm。
从以上模型的像控点、检查点、平面和高程精度值可以很明显地看出,使用无人机倾斜摄影测量技术进行三维建模,其精度较高、分布均匀,符合测绘级别精度要求,完全符合《数字航空摄影测量空中三角测量规范》(GB/T 23236-2009)和《三维地理信息模型数据产品规范》(CH/T9015-2012)等行业规范。
4 技术难点
传统的矿山地形测绘的技术手段有:(1)全站仪、GNSS 的单点式数据获取手段。这种方法虽精度高,但作业效率低、危险性大;(2)激光雷达技术扫描式获取手段。这种方法效率高、精度高,但设备昂贵,数据量大且难以处理;(3)传统摄影测量手段。这种方法拍摄角度单一,难以获取地物的侧面信息,其生产成果只能对长度、面积等平面信息进行测量。总之,传统的技术手段较难全面地获取矿山的三维信息。
倾斜摄影测量技术突破了影像视角单一的局限性,采用多视影像区域网联合平差的方法,利用SIFT 等算法从多角度的若干张影像中提取特征点和线,从POS 数据信息中筛选提取出倾斜影像的外方位元素。这种技术利用最小二乘匹配方法、同名点匹配法以及区域网光束法联合平差来消除影像的几何形变和遮挡影响,提高平差精度[6],由特征点、特征线、控制点以及POS 数据建立误差方程,最终求得影像的外方位元素和物方坐标。
为解决由于露天矿山高程落差大而导致三维建模效果不理想的情况,研究小组在高程变化明显的地方均匀布设控制点,并且在无人机采集数据时根据已有地形数据人为控制调整飞行高度,保证了区域各处重建效果和精度的一致性。研究小组利用无人机搭载倾斜相机镜头获取研究区影像,大大减少了外业测量工作量。露天矿区地物间相互遮挡较少,经实验证明,影像效果好,构建的模型精度优于10 cm,作业效率高、费用低。
5 结语
研究小组通过对无人机倾斜摄影测量与三维建模的研究,结合广西某矿山的三维模型生产实例论证该技术可行性。实验得到模型平面坐标中误差为±6.7 cm,最大误差为10.2 cm;高度中误差为±6.3 cm,最大误差为8.6 cm,模型精度可达厘米级,且均符合行业参考精度要求。实验直观表达了基于无人机倾斜摄影三维建模与矿山测绘结合的可行性,并得到以下结论。
(1)基于无人机倾斜摄影的三维建模能够满足矿山表面测绘需求,模型的精度达到相关规范要求。
(2)相较于同类三维建模方式,无人机倾斜摄影测量更适合矿山测绘,它性价比高,采集数据速度快,生产模型效率高。运用该技术可减少测绘人员在矿山危险区域的地面实测次数,既可以提高安全性,又可以为露天矿山开采以及其他工作提供相关数据支撑。
(3)矿山环境复杂,下一步应继续探讨影像数量、航高、地形因素、天气因素等条件对模型精度的影响,以进一步推广无人机倾斜摄影测量在矿山环境治理、资源估算、开采监测等领域的应用。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
建材发展导向(2021年22期)2022-01-18
有色金属(矿山部分)(2021年4期)2021-08-30
有色金属(矿山部分)(2021年4期)2021-08-30
河北地质(2021年2期)2021-08-21
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
电子乐园·上旬刊(2021年8期)2021-05-16
矿产勘查(2020年7期)2020-12-25
建材发展导向(2019年10期)2019-08-24