基于非线性干扰观测器的船舶编队控制方法
2022-06-07 09:03董然孙创傅强李长江魏薇辛禄平
哈尔滨工程大学学报 2022年5期
董然, 孙创, 傅强, 李长江, 魏薇, 辛禄平
(1.北京石油化工学院 信息工程学院, 北京 102617; 2.宜昌测试技术研究所,湖北 宜昌 443003; 3.中国海洋大学 工程学院, 山东 青岛 266100; 4.中国石油大学(华东) 机电工程学院, 山东 青岛 266580)
随着人类对于海洋资源开发和利用的需求日益增加,单艘动力定位船舶已无法满足某些大型海洋工程项目的作业要求,例如大型海底油气设施安装和拆卸、大型海上结构物的拆解、海上大型无动力负载的拖曳操纵等任务,都需要多艘动力定位船编队来完成。因此,研究多动力定位船编队控制方法具有重要的工程实际意义。
船舶在海上会受到以风、浪、流为主的时变环境干扰,显著影响船舶动力定位精度。这类干扰往往持续不断,随机性强,精确测量很困难,因此,有效估计和补偿海洋环境干扰对多船编队控制十分必要。文献[1]利用自抗扰控制技术对未建模扰动因素进行估计和补偿;文献[2]提出一种基于自适应在线逼近技术和径向基神经网络的控制器,用神经网络来估计时变、不确定的海洋环境干扰;文献[3-4]使用自适应模糊控制方法来逼近未知环境干扰,解决模型不确定性;文献[5]通过滑模控制技术使外扰观测器的估计误差在有限时间内收敛至扰动的固定倍数范围内;文献[6-7]分别使用非线性扩展状态观测器和干扰观测器来估计未知时变环境扰动,且观测误差有界。
在非线性系统的控制设计中,除了要应对不确定环境干扰因素,通常还要关注系统动态响应品质。为此,非线性控制领域的大量研究成果从不同角度,提出了改善控制系统瞬态性能的方法[8-11]。文献[8]采用漏斗法,即根据漏斗的形状分配系统瞬态响应速率,但其只能保证系统输出的近似性能,适应性一般;此外,该方法用到与误差相关的控制增益,会在误差接近漏斗边界时无限变大。文献[9]提出了预设性能控制的概念,针对一类严格反馈非线性系统,首次使用性能约束函数将系统输出误差限制在任意设定的范围内,例如限制收敛速度在给定范围以节约控制能量、提高系统鲁棒性。随后,文献[10]根据网络拓扑结构,提出一种带预设性能的编队自适应控制方法,成功应用于具有未知非线性的高阶系统。文献[11]针对水面船的轨迹跟踪控制问题,使用一种预定义性能的自适应神经输出反馈控制方案,将跟踪误差限制在自定义集合范围内。
基于上述研究成果,针对多动力定位船舶在未知时变干扰环境中的编队控制问题,本文首先设计了一种非线性干扰观测器来估计不确定扰动,其干扰估计误差能在有限时间内收敛;其次,根据船舶间通信拓扑、结合反步法设计分布式编队控制器来补偿环境干扰,并引入响应速度函数将跟踪误差转换,以实现期望的跟踪性能;最后,仿真验证本文所提出方法的有效性。
1 数学基础和问题描述
1.1 数学符号
本文用到以下数学符号:λmin(·)、λmax(·)和λi(·)分别表示方阵最小、最大、第i个特征值;‖·‖表示向量2-范数或矩阵范数;Rn×n表示n×n维欧式空间;sign为符号函数;diag{ai}表示对角矩阵,ai为对角线上第i个元素;sigδ(y)表示|y|δsign(y),其中δ>0,y∈R;⊗表示克罗内克积。
1.2 有限时间稳定性
引理1[12]考虑连续系统

(1)
假设存在一个正定的连续函数V:Rn→R,实数β>0,l∈(0,1)和原点的一个开邻域U0∈Rn,满足:
(2)
则连续系统(1)的原点是有限时间稳定的。若满足U0=Rn,则原点是全局有限时间稳定的。
1.3 图论基础

1.4 响应速度函数
为使船舶跟踪误差在预先设定时间内收敛,构造响应速度函数为[13]:
(3)
式中:0<ξf≤1是待定参数,函数γ(t)由式(4)给出:
(4)
性质1:ξ(t)关于时间的一阶和二阶导数都存在且有界。

1.5 问题描述
动力定位船舶的3自由度数学模型为[14]:
(5)
(6)
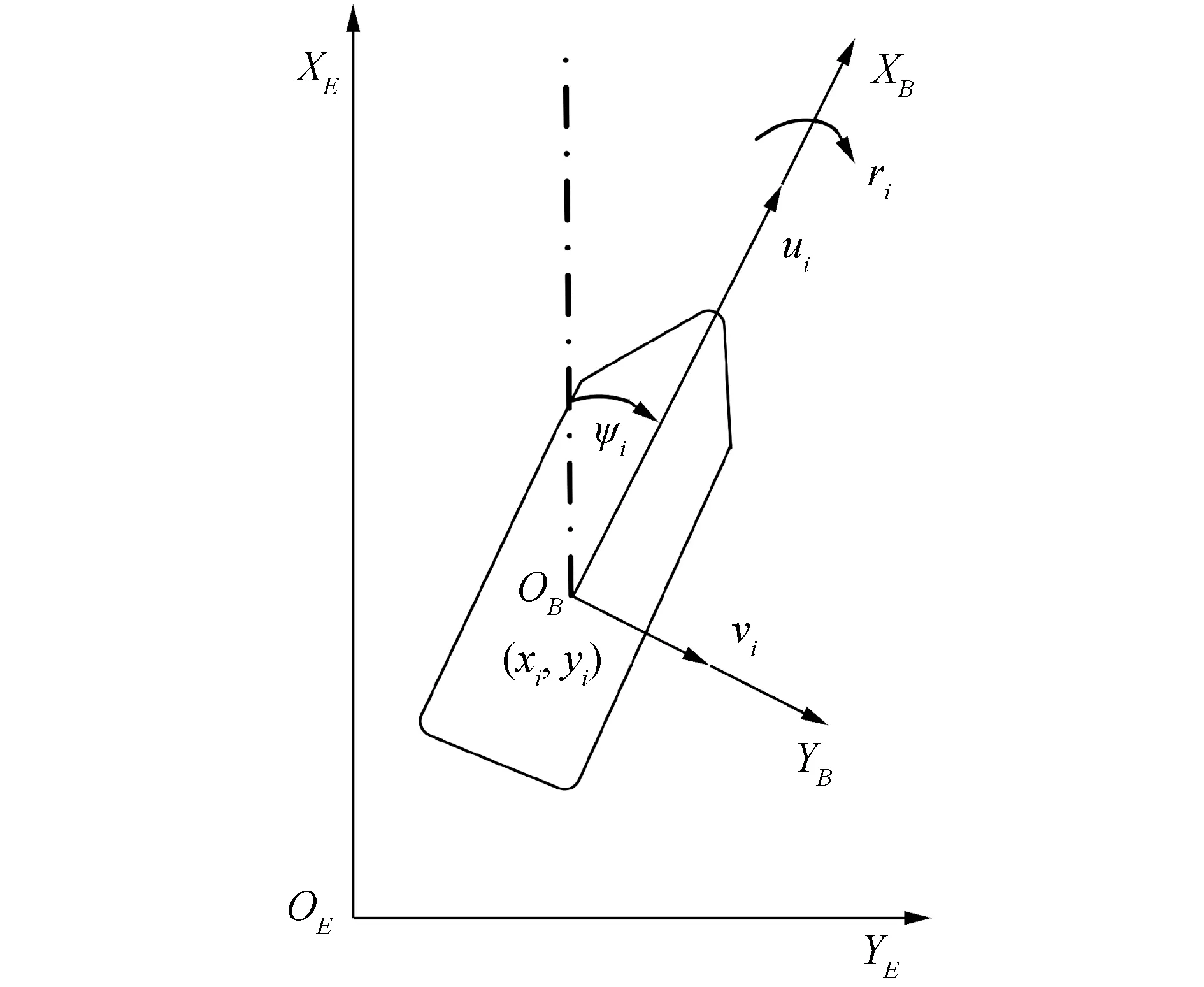
图1 船舶运动坐标系
为方便下文书写,用符号Ri代表R(ψi)。
控制目标:针对每艘动力定位船设计分布式控制律,使船在时变环境干扰作用下能保持期望队形,并按照期望性能跟踪虚拟领航船,即参考信号ηd。
本文的分析和设计工作用到以下假设条件。
假设1至少存在一条从虚拟领航船到每艘跟随船的有向路径。


2 非线性干扰观测器设计
本节设计干扰观测器为:
(7)

为方便设计,引入一个新向量ωi,定义为:
(8)
(9)
式中:Li1和Li2是设计的正定对角矩阵,δi1和δi2是设计的正常数,且满足0<δi2<δi1<1和δi2=2δi1-1。
(10)
(11)
(12)

定理1通过选择合适的非线性干扰观测器式(7)~(9)参数,时变环境干扰能在有限时间内被估计,且估计误差在有限时间内收敛。
定理1表明,本节设计的干扰观测器的干扰估计误差能在有限时间内收敛。
证明选择李雅普诺夫函数为:

(13)

(14)
将式(13)的等号两边对时间求导,可得:
(15)
(16)
由δi2=2δi1-1和xid的表达式可知式(16)中:
-Li2sigδi2(xi1)=-xid·Li2·sigδi1(xi1)
(17)
且有:
(18)
(19)
因此,

(20)
将式(20)等号两边同取转置后,可得:
(21)
进而根据式(22)~(24),可得式(25),则式(26)成立。
(22)
(23)
XPPi=PiXP
(24)
(25)
(26)

由引理3可知XPHi1的特征根λ满足:
(27)
则由式(26)、式(27),结合“假设2”给出的环境干扰边界,可得:


(28)
‖i‖2=+‖xi2‖2
(29)
(30)
(31)
λmin(XP)=μδi1-1>‖
(32)

(33)

(34)
‖
(35)
(36)
(37)
(38)
(39)

证毕。
3 编队控制器设计
本节基于反步设计思想完成动力定位船舶编队控制器设计。
首先,结合编队内船舶之间相对方位误差以及跟踪编队领航船的误差,定义编队“综合跟踪误差”zi1为式(40),注意本设计采用单编队领航船。
(40)
式中θi∈R3表示第i艘船与参考信号ηd之间的期望相对位置。
为改善跟踪性能,引入误差转换:
si1=ξi1·zi1
(41)
式中:ξi1即为式(3)的ξ(t);si1关于时间的导数为:
(42)

然后,定义第2个跟踪误差zi2为式(43),其中αi满足式(44),式中ki1∈R3×3是设计的正定对角增益矩阵。由式(6)可知zi2的导数满足式(45)。
zi2=υi-αi
(43)
(44)
(45)
将式(43)、式(44)代入式(42)后得到式(46)。为使zi2收敛,设计推进系统控制律为式(47),式中ki2∈R3×3是设计的正定对角增益矩阵,将式(47)代入式(45)得到式(48)。
(46)
(47)
(48)
下面的定理表明,对于由式(40)、(41)、(43)、(44)、(47)构成的闭环动态系统,在恰当选取控制增益前提下,能使跟踪误差收敛。
定理2对于由动力定位船舶式(5)和式(6)、基于干扰估计更新律式(9)的非线性干扰观测器式(8)、基于虚拟控制律式(44)的分布式编队控制律式(43)和式(47)所组成的船舶编队闭环控制系统,若假设条件1~3均满足,则选取合适的控制增益能使船舶编队的跟踪误差有界,且误差将以期望的收敛速度在设定时间内收敛到平衡点附近。
证明针对编队中任意船的跟踪误差,选取李雅普诺夫函数为:
(49)
对式(49)两边求导,根据式(46)、式(48)和式(50)可得式(51)。
(50)

(51)
根据杨氏不等式和响应速度函数的性质2,有下列不等式成立,式中ξif与式(3)的ξf含义一致。
(52)
(53)
将式(52)和式(53)代入式(51)后可得式(54)。
(54)
(55)
(56)
(57)
-(ζiaV1+ζibV2)≤-ci2V
(58)
(59)
(60)
再由式(3)、式(4)和式(41)得到:
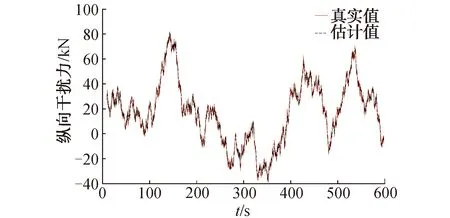
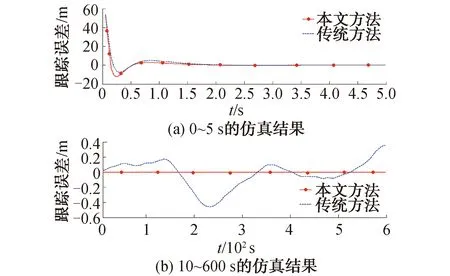
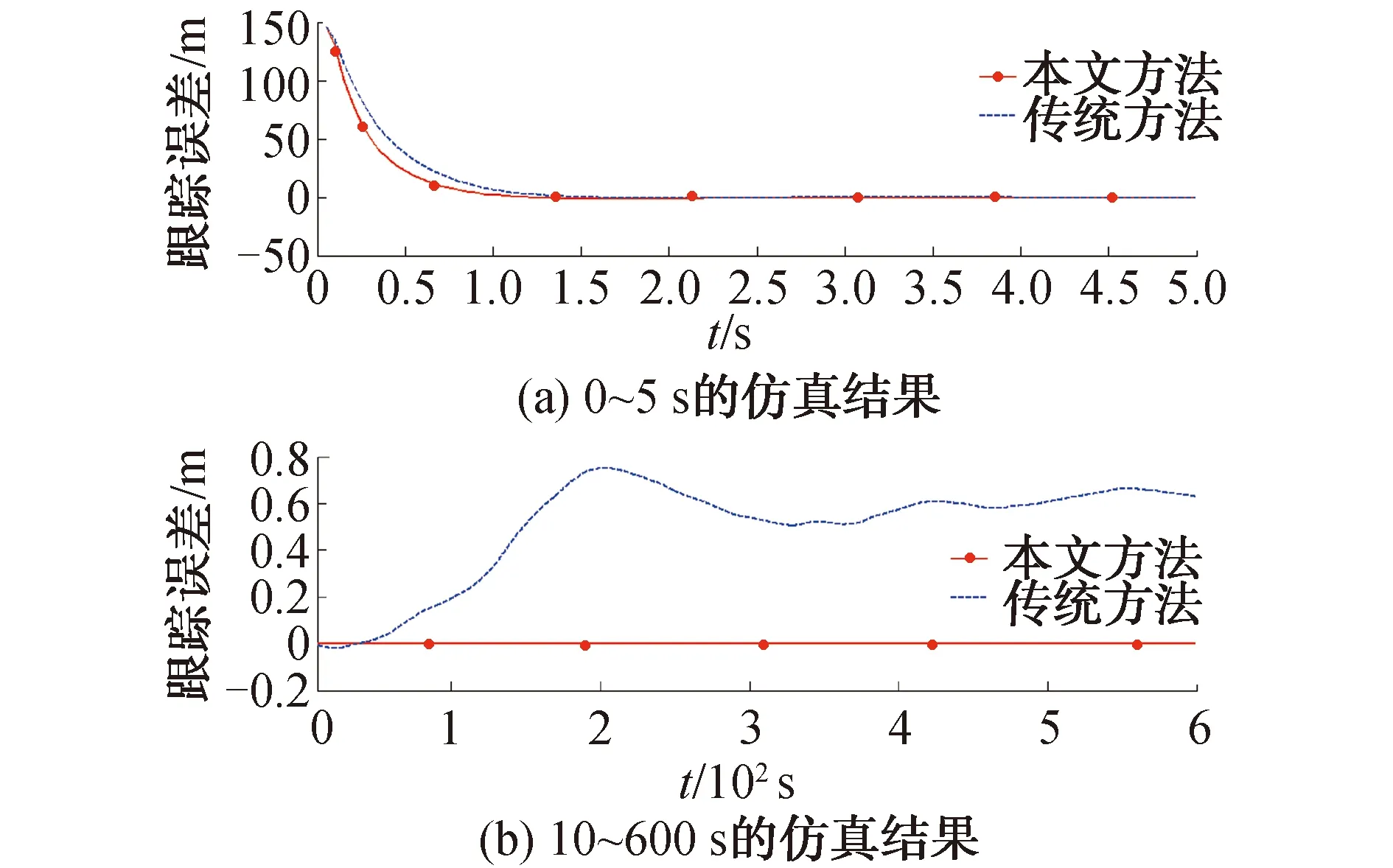
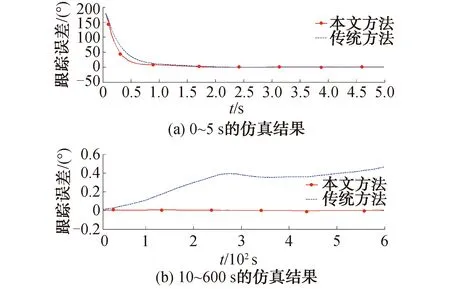
(0 (61) 在大地坐标系中定义船舶i的“绝对跟踪误差”为: ei=ηi-ηd-θii∈[1,n] (62) (63) (64) (65) (66) 1)计算‖z1‖的边界。 (67) 2)计算‖RT‖m2的边界。 (68) 根据克罗内克积的一般性质可得式(69)和式(70),进而推出式(71)和式(72)[18]。 (69) (70) (71) (72) 综上可得: (73) 本文以3艘动力定位船组成的编队来验证所提出控制方法的有效性。选取邻接矩阵: (74) 式中:b∈R3满足一阶马尔可夫过程;Tb为时间常数对角阵;Φ为扰动幅值对角阵;ω∈R3为零均值高斯白噪声向量。 船舶编队跟踪控制效果如图2所示。可见,尽管存在初始位置偏差和环境干扰,但编队船舶在完成轨迹纠偏后都能以期望队形紧密跟踪参考信号。 图2 船舶编队路径跟踪控制 对该跟踪过程中船1在纵荡、横荡和艏摇3个自由度上所受的时变环境干扰,本文设计的非线性干扰观测器的估计结果如图3~5所示。尽管估计值在仿真初期振荡幅度较大,但很快收敛,仿真10 s后观测器的整体估计准确度较高,纵、侧向力干扰的估计误差限制在6 kN以内,力矩干扰的估计误差限制在15 kN·m以内,表明本文设计的非线性干扰观测器具有良好的环境扰动估计性能。 图3 船1所受纵向干扰力的真实值和估计值 图4 船1所受侧向干扰力的真实值和估计值 图5 船1所受首向干扰力矩的真实值和估计值 下面对比本文设计的控制器与基于传统反步法的控制器在降低编队跟踪误差方面的性能。考虑到传统方法不含响应速度函数以及本文设计的干扰观测器,则基于传统反步法设计的、与式(44)和式(47)相对应的控制律分别为: (76) 将这2个控制器对应参数取相同数值,则船1在二者控制下,跟踪图2所示期望轨迹过程的综合误差,即z11,如图6~8所示。图6~8的(a)图表明:2个控制器都能迅速降低船舶初始方位偏差,作用2 s后的对应误差曲线几乎重合;相比之下,本文提出的控制方法在缩小编队船舶的初始方位偏差方面速度更快,响应指令能力更强。 图6 船1纵向跟踪误差对比 图7 船1侧向跟踪误差对比 图8 船1首向角跟踪误差对比 当放大响应曲线后发现:因传统控制方法缺乏环境干扰补偿机制,系统对扰动更敏感,被控变量的响应呈现缓慢振荡的特点,尽管仍在原点附近变化,但误差有逐渐累积趋势;相比之下,本文提出的控制方法鲁棒性更好,系统在时变随机干扰环境下的跟踪精度很高,如图6~8的图(b)所示。 基于此,考虑在传统控制方法中加入本文设计的干扰观测器,即仍用式(47)控制律但不引入响应速度函数,仿真编队船舶对图2所示期望轨迹的跟踪情况,结果为:仿真持续2 s后,传统方法和本文提出方法的跟踪精度都很高,且跟踪误差的变化曲线几乎完全吻合;而仿真开始后2 s内,传统控制方法产生的纵向、侧向和艏向跟踪误差分别与图6~8的图(a)十分接近。这再次证明了本文设计的非线性干扰观测器的有效性,也表明本文构造的响应速度函数改善了控制系统对指令的响应品质,使船舶跟踪误差能在预先设定时间内收敛。 1)运用李雅普诺夫稳定性理论,详细证明了所设计的非线性干扰观测器的扰动估计误差能在有限时间内收敛,以及整个闭环控制系统的跟踪误差有界,且能满足预设的收敛性能; 2)仿真实验表明,本文设计的船舶编队控制器具有良好的环境扰动估计和精确的方位跟踪控制性能,且相比不带扰动观测器的传统反步控制方法,本文提出的控制方法使闭环系统响应更快,鲁棒性更好。






4 仿真验证







5 结论
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
现代电力(2022年2期)2022-05-23
山东建筑大学学报(2021年6期)2021-12-23
北京航空航天大学学报(2021年7期)2021-08-13
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
阅读与作文(英语初中版)(2019年11期)2019-09-10
软件(2017年9期)2018-03-02
北京航空航天大学学报(2017年6期)2017-11-23
智富时代(2017年4期)2017-04-27