
多功能床椅一体化助老机器人机械系统设计与实现
2022-05-31 05:12董绪斌刘晓飞周小龙罗春阳李建永
北华大学学报(自然科学版) 2022年1期
董绪斌,刘晓飞,周小龙,罗春阳,李建永
(北华大学机械工程学院,吉林 吉林 132021)
随着人口老龄化及城市化进程的加快,预计到2020年我国空巢老人数量将增至1.18亿[1].其中,因神经系统控制能力下降,肌肉力量降低等因素引起的运动机能障碍老年人数量将急剧增加[2].然而,我国从事护理工作的专业看护人员数量却严重不足[3].因此,研制助老机器人以代替护理人员或家人照看老年人显得尤为重要[4-5].目前,关于助老机器人的研究大多集中在护理床[6-7]或智能轮椅[8-9]方面,即仅考虑多功能或多姿态的转换而无法实现自由行走,或存在舒适度不足、操作烦琐等问题.究其原因,主要是缺乏对相关设备的功能优化,以及控制系统自动化程度低.随着人们对助老机器人舒适度和智能化要求的提高,研发功能完善、操作方便、舒适度高的多功能护理设备已成为未来该领域研究的热点和难点[10].鉴于上述原因,本文针对现有助老设备结构及功能特性,结合康复医疗标准、人机工程学、现代设计与分析理论,设计一款集床椅变换和体位调整、全向移动等功能于一体的助老机器人,分别设计轮椅机构、固定床身机构及全向行走机构,通过有限元分析对关键部件进行刚度和强度校核,通过系统集成和调试实现完整功能验证.本研究通过机构设计将轮椅和床进行功能集成,为助老机器人的功能集成化提供一种解决途径;通过对关键部件的分析和系统集成调试,为该助老机器人的实用化奠定技术基础.
1 功能分析与方案设计
针对下肢运动机能障碍老人的特点,充分考虑康复护理的特殊需求,依据现有康复床的功能要求和行业标准设计助老机器人,实现床椅结合功能.一方面,实现被护理者起背、屈腿、平躺等不同位姿的变换调节,有利于被护理者血液循环;另一方面,实现360°全方位自由平稳地自动行走与避障,满足被护理者的代步要求.图1为助老机器人功能与结构,主要由轮椅机构、固定床身机构和自主移动机构组成.

图1 多功能床椅一体化助老机器人功能及结构Fig.1 Function and structure of multifunctional bed chair integrated elderly robot
1.1 轮椅机构
助老机器人轮椅机构见图2,主要由行走机构、支撑座、坐板、扶手、靠背板、腿板及脚踏板等组成.行走机构由控制系统独立操控,可通过语音或操纵杆控制行走方向,并配合超声波避障传感器,实现自由行走及避障功能;支撑座为连接座椅与行走机构的过渡部件,也为姿态调整机构、控制器及电池组提供安装空间;靠背板、腿板、脚踏板、扶手及坐板组成角度可调的座椅机构,在电动操纵杆控制下,既可实现坐/卧姿态调整,亦可实现靠背板与腿板角度的独立调整,为使用者提供丰富的体位选择.

图2 轮椅机构Fig.2 Wheelchair mechanism
图3为轮椅姿态调整机构,可实现靠背角度、腿板角度、脚踏板联动调节.为适应床椅转换的状态需求,设计了扶手翻转机构(图4),该机构可实现扶手90°翻转.该机构由电动推杆、限位块及扶手组成,扶手与坐板用铰链连接,电动推杆通过支耳与扶手外侧连接.为避免由于扶手水平保持能力不足导致受压变形,在两侧扶手上设置了可调限位块,用以提高扶手在水平状态时的刚度.
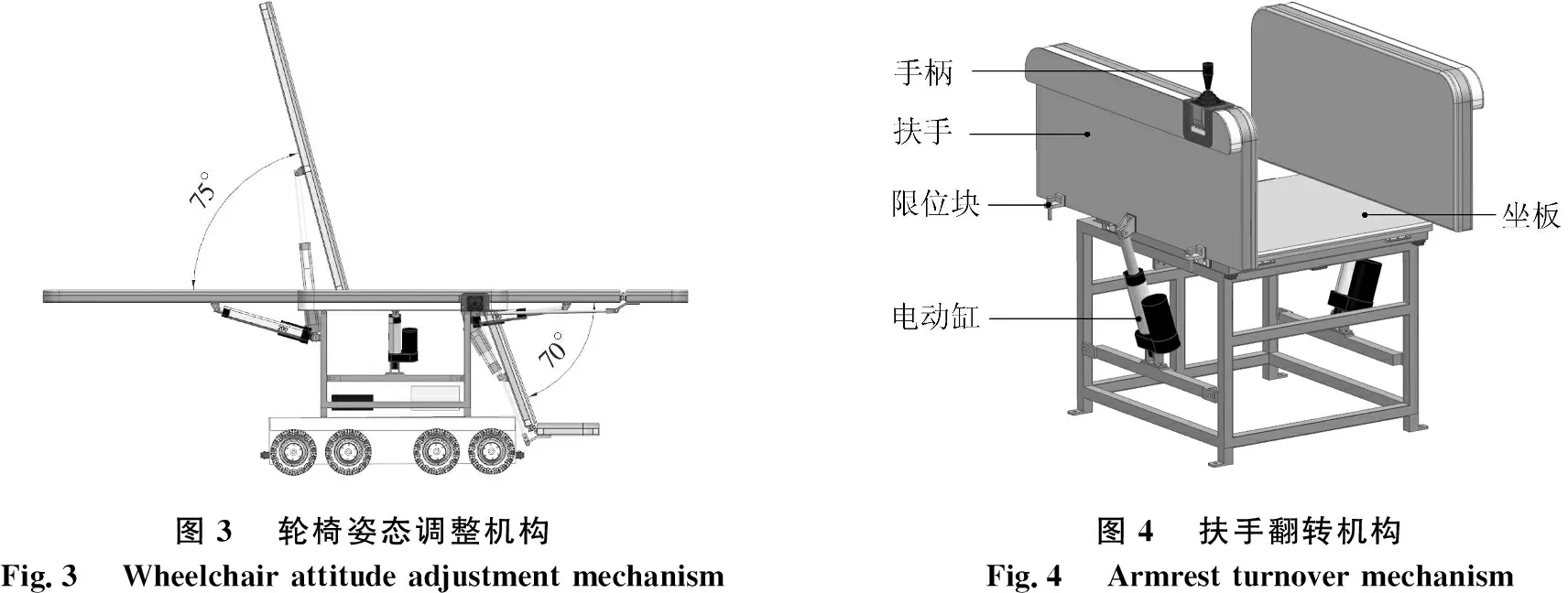
图3轮椅姿态调整机构Fig.3Wheelchair attitude adjustment mechanism 图4扶手翻转机构Fig.4Armrest turnover mechanism
1.2 全向行走机构
为保证轮椅机构实现360°全向自由行走,选用8轮Mecanum轮结构.图5为行走机构示意图,由于左右对称,故只给出左半侧结构.
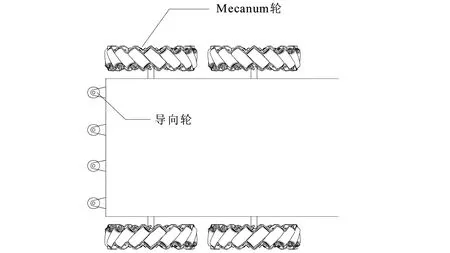
图5 行走机构Fig.5 Moving mechanism
1.3 固定床身机构
机器人固定床身机构见图6,主要由床身骨架、床板、对接导向机构及可调高脚轮组成.床身骨架整体设计成“C”形,由钢管焊接而成,为便于运输和安装,设计成左、右两个固定床体,中间用钢管连接,床身骨架底部安装可调高脚轮,以满足不同安装高度的需要;骨架上方安装固定床板,可与轮椅面构成完整床面,考虑到床椅对接时避让干涉的需要,将轮椅进出侧的床板设计成可翻转结构,以保证轮椅机构的顺利进出;为提高轮椅相对固定床身的定位精度,在固定床身底部设置了对接导向机构,用以约束轮椅上的滑轮组,实现轮椅的定位导正.
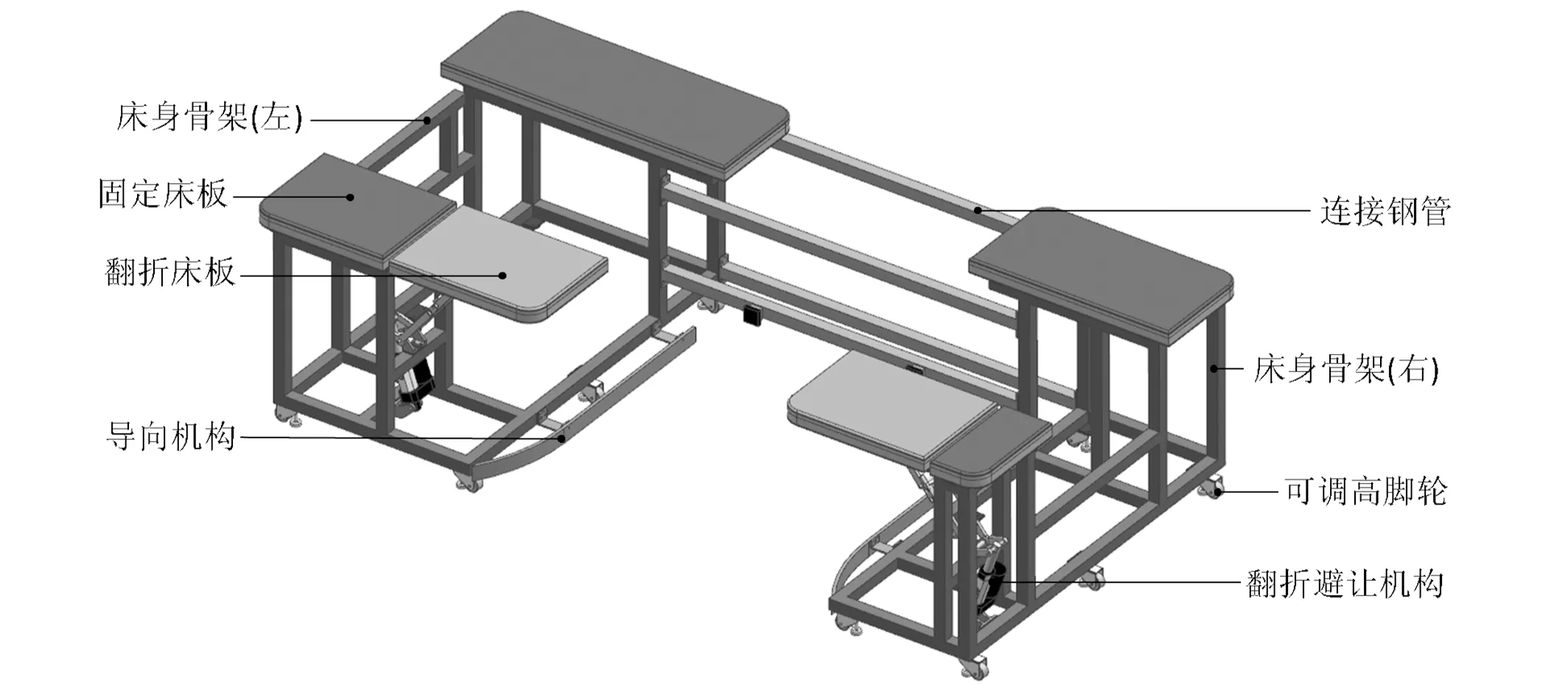
图6 机器人固定床身机构Fig.6 Fixed bed mechanism of robot
在床椅结合与分离过程中,轮椅需要进出固定床身区域,由于结构限制,固定床身中有两处床板与轮椅的进出路线发生干涉,为此设计了翻折避让机构.翻折避让机构由电动推杆、摆杆、连杆、翻折床板构成(图7 a),通过电动推杆伸缩,带动摆杆摆动,再通过连杆控制翻折床板转动,实现床板水平状态与竖直状态的转换.在水平展开时,摆杆与连杆处于机械死点,有效提高了翻折床板水平状态的刚度.图7 b为翻折避让竖直状态,此时床板翻折,为轮椅进出打开通道.

图7 翻折避让机构结构及工作状态Fig.7 Structure and working state of folding and avoiding mechanism
表1为助老机器人各机构可实现功能及可调范围.
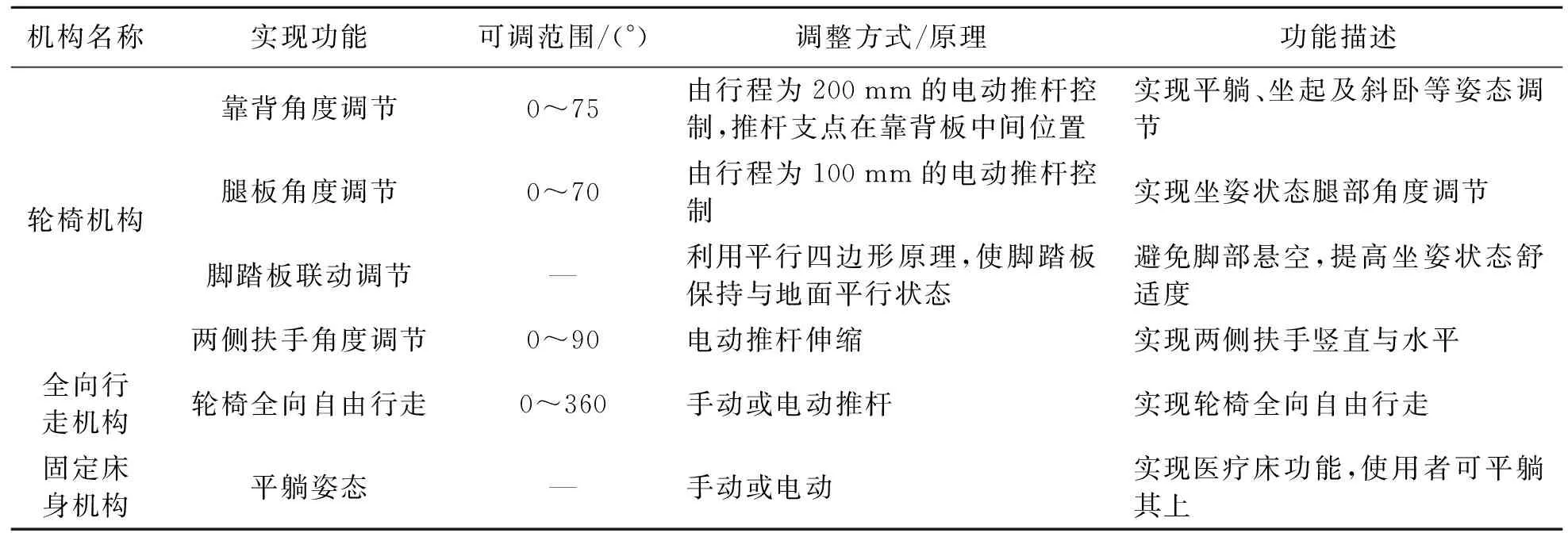
表1 助老机器人各机构可实现功能及可调范围Tab.1 The function and adjust range of each mechanism of service robot for elderly
2 关键部件有限元分析
助老机器人在不同位姿变换过程中,主要承力部件为底座支撑座和人体上半身靠板,因此,分析助老机器人关键零件在承力极限情况下的结构稳定性具有重要意义.本次研究对助老机器人底座支撑座和上半身靠板在承力极限情况下的结构强度和刚度进行有限元分析.
2.1 固定床身机构
作为轮椅机构的核心部件,支撑座是主体承重结构,选用规格为20 mm×20 mm×1.5 mm的Q345B方管焊接而成.根据受力特性,在支撑座上端4个铰接处添加1 500 N竖直载荷力,在支撑座下端4个铰接处添加固定铰链约束,对模型进行网格划分.对网格化后的支撑座部件进行有限元仿真分析.按照约束条件施加载荷后的变形及应力分析结果见图8.由图8 a可知,支撑座最大应力分布比较均匀,未出现较严重的应力集中现象,最大应力为248.2 MPa,Q345B屈服强度345 MPa,安全系数达到1.3,强度满足设计要求;由图8 b可知,支撑座的最大变形出现在中间部位,最大变形为5.462 mm,该变形量不会影响床椅结合与分离动作.因此,所设计的支撑座强度及刚度符合要求.
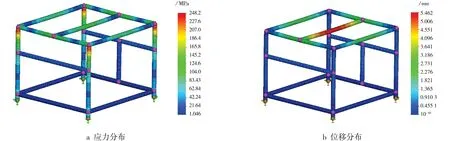
图8 支撑座有限元仿真Fig.8 Finite element simulation of support base
2.2 靠背板
靠背板是支撑操作者上半身的重要部件,主要承受操作者上半身载荷.靠背板主承载结构为靠背骨架,选用规格为20 mm×20 mm×1.5 mm的Q235方管焊接而成,见图9.该靠背骨架通过电动推杆控制,可沿铰链轴向上翻转,图9为平置状态,该状态要求骨架承力为500 N,依靠电动推杆限制.在靠背骨架几何中心施加500 N竖直向下力,将电动推杆看成固定支承,验证两个铰链的强度.靠背骨架的变形见图10 a,最大变形量为2.289 mm,满足设计刚度要求;应力分布见图10 b,最大载荷出现在中心支点处,应力为195.773 MPa,安全系数达到1.2,强度满足设计要求.
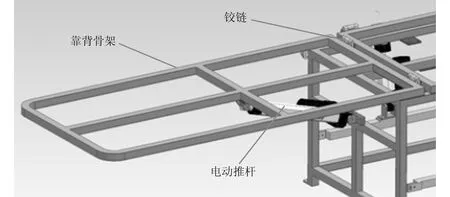
图9 靠背板结构Fig.9 Back panel structure

图10 靠背骨架仿真Fig.10 Simulation of back panel frame
2.3 扶手翻转机构
扶手翻转机构见图11.扶手骨架通过电动推杆控制,可沿铰链轴向上翻转90°,图11为平置状态,该状态下要求骨架承力500 N,依靠可调限位螺钉(两个)限制.对扶手骨架、铰链及限位机构进行有限元仿真分析,在扶手骨架几何中心施加500 N竖直向下力,验证两个铰链的强度,并验证扶手骨架在受载状态下对两个可调螺钉限位机构造成的应力及应变情况.将铰链与限位螺钉设置为固定约束,在扶手骨架上施加500 N的载荷(该部件不是主承力部件,故按照2/3载荷加载).
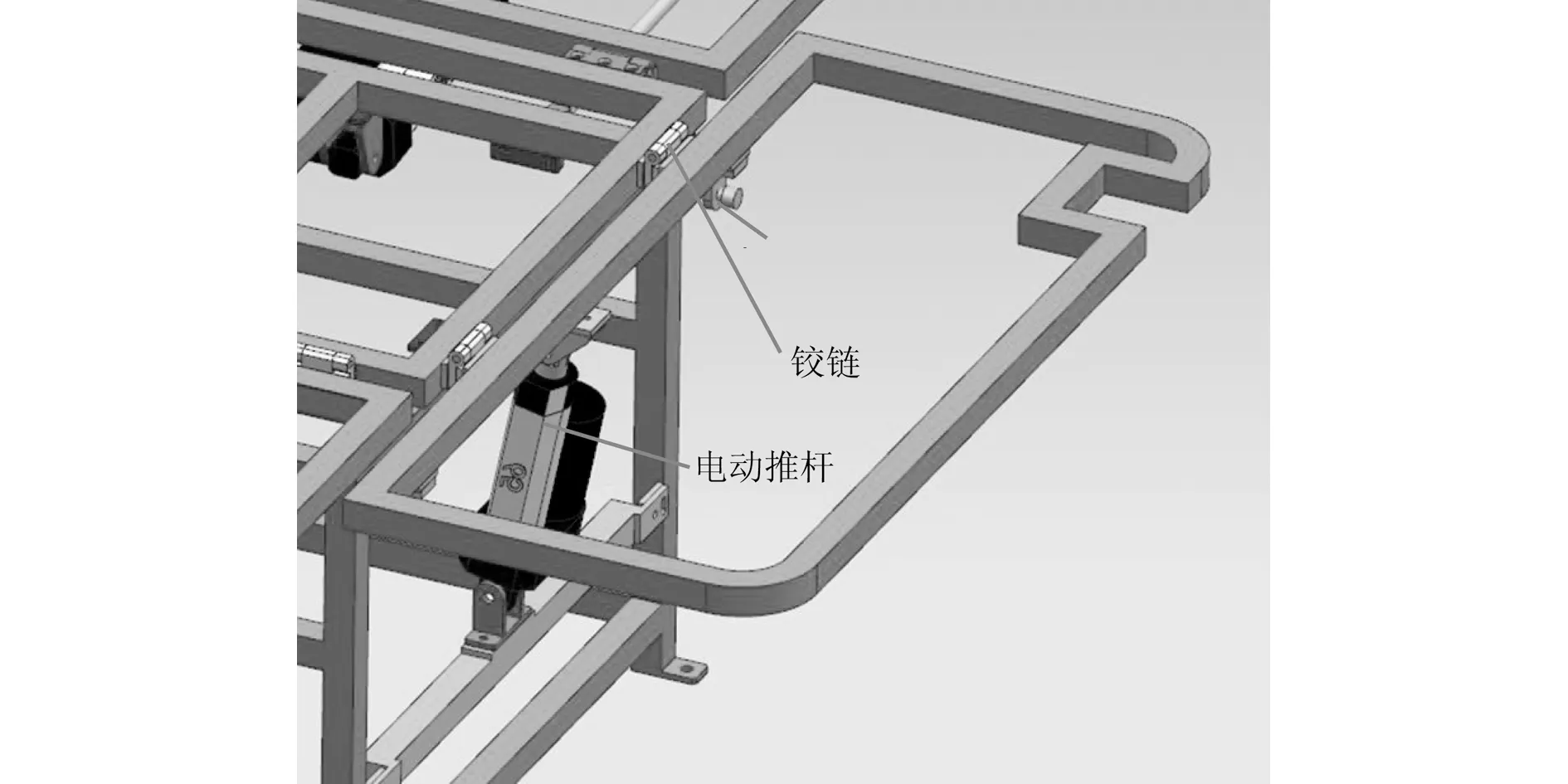
图11 扶手翻转机构平置状态Fig.11 Horizontal state of the armrest turnover mechanism
扶手骨架变形见图12 a,最大变形量为2.362 mm,该变形不影响康复床性能;扶手骨架应力见图12 b,最大应力出现在矩形骨架拐角处,为152.772 MPa.骨架选用Q235,屈服极限为235 MPa,安全系数达到1.5,满足设计要求.限位螺钉处的应力为48.818 MPa,铰链轴处的应力为88.268 MPa,限位机构及铰链均满足强度要求.
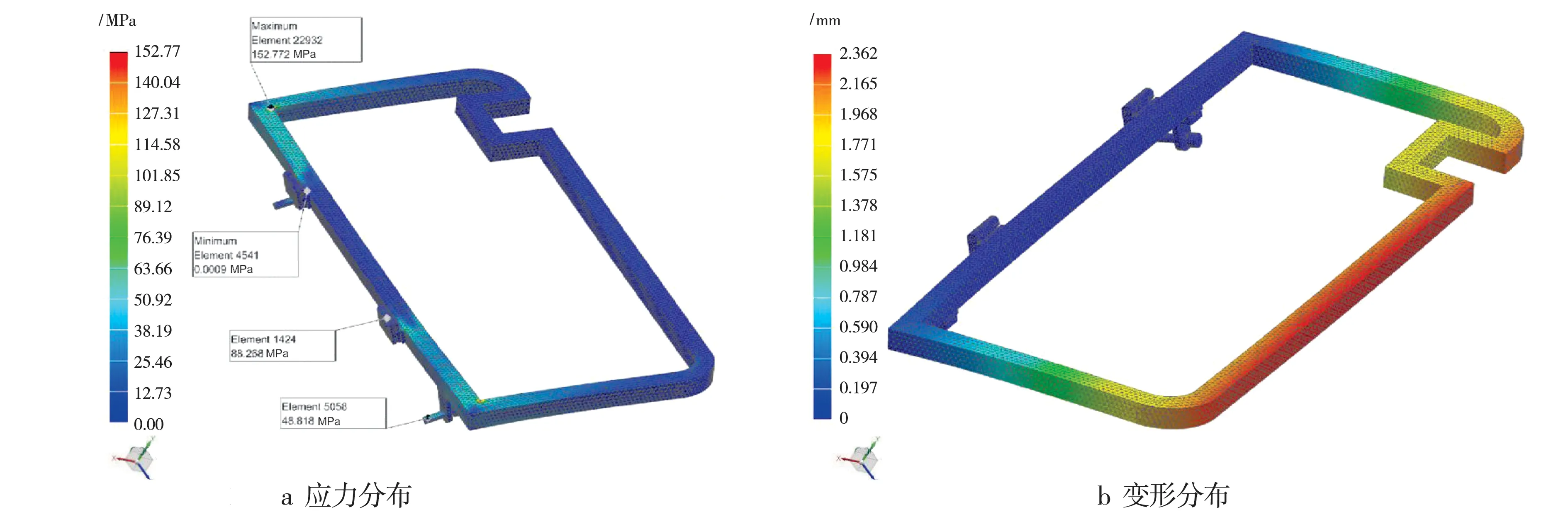
图12 扶手翻转机构有限元仿真Fig.12 Finite element simulation of armrest turnover mechanism
3 系统集成与调试试验
在前期对助老机器人进行研究分析的基础上,结合三维模型和控制系统,研制出该助老机器人的试验样机,见图13.试验样机机械系统主体由普通碳钢型材搭建而成,采用焊接和螺栓两种连接方式,包括床身、座椅和移动底盘.为了提高整体美观度和舒适性,对助老机器人整体进行打磨、喷漆处理,并在床身及椅座表面包覆由海绵、布料组成的双层坐垫.在床身底部安装了水平调节脚轮,以增强床身的可移动性,实现高度调节.

图13 床椅一体化助老机器人试验样机Fig.13 The prototype of bed chair integrated elderly robot
3.1 移动底盘行走机构
移动底盘行走机构见图14.移动底盘采用8个基于Mecanum技术的车轮,经测试,在控制信号作用下底盘可以依靠Mecanum轮实现前行、横移、斜行、旋转及其组合等运动方式,可有效提高移动底盘行走的灵活性,降低操作难度.
3.2 对接机构
对接机构见图15.受限于外界条件,采用传感器进行床身和座椅对接时会存在一定误差.为提高对接准确性,在原有结构基础上增加了导向轨道对接机构,即在床身入口处的左、右两侧各安装一条导向轨道,在移动底盘的前、后方向各安装4个导向轮.调试显示,对接精度得到有效提高.

图14移动底盘行走机构 Fig.14Moving mechanism of chassis图15对接机构Fig.15Docking mechanism
3.3 一键脱离与对接
一键脱离与对接调试场景见图16.启动床椅分离按钮,避让机构启动,轮椅在受控信号控制下进行姿态初步调整,然后移动底盘沿着导向轨道驶出;对接过程与此相反,即按下对接按钮,轮椅行驶至对接区,进行姿态调整,完成床椅结合,此过程的机械运动均由助老机器人自主完成.调试可知,该功能可以有效实现.
3.4 轮椅姿态调整
在轮椅驶出床身后,用户可通过控制手柄对助老机器人的姿态调整机构进行控制以满足身体对舒适度的要求.可进行调整的部分主要包括靠背板、腿板和脚踏板,见图17.实际测试的机器人综合性能指标见表2.
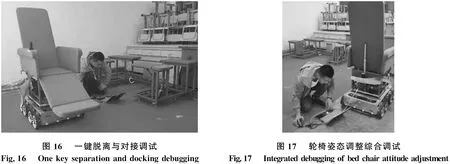
图16一键脱离与对接调试Fig.16One key separation and docking debugging图17轮椅姿态调整综合调试Fig.17Integrated debugging of bed chair attitude adjustment

表2 多功能床椅一体化助老机器人性能指标Tab.2 Performance of multifunctional bed chair integrated elderly robot
4 小 结
针对人口老龄化造成的护理资源不足,生活难以自理、行动不便人群缺乏照顾的社会问题,研制了一款多功能助老机器人.该机器人采用床椅一体化设计理念,将可移动单元(轮椅)有机嵌入护理床体内,采用一键启动控制,可实现床椅离合,通过优化设计,无须他人辅助即可实现老人在床椅之间的转换;采用室内SLAM定位导航技术,实现地图构建和自动路径规划;可实现语音、操纵手柄等模态操控,有效实现对老人护理的操作辅助、运动辅助、认知辅助功能.通过关键机构和零件的运动学分析及有限元仿真分析,在理论上证明了该设计的可行性,并通过实际样机调试,验证了该机器人的设计可行性和工作可靠性.本研究可为床椅一体化助老机器人的研究提供参考,同时可为后续功能完备性研发奠定基础.
猜你喜欢
恋爱婚姻家庭(2022年30期)2022-11-03
电子乐园·上旬刊(2022年5期)2022-04-09
银潮(2021年6期)2021-11-15
文萃报·周五版(2021年23期)2021-08-06
银潮(2021年6期)2021-07-15
发明与创新·大科技(2020年6期)2020-06-22
中国新技术新产品(2020年5期)2020-05-06
小天使·一年级语数英综合(2019年4期)2019-10-06
金山(2018年9期)2018-11-21
天津诗人(2017年2期)2017-11-29
