纵向短周期试飞驾驶技术
2022-05-27 16:10:44焦连跃郭勇冠
科技与创新 2022年10期
焦连跃,郭勇冠
(中国飞行试验研究院,陕西 西安 710089)
飞机纵向短周期模态具有振荡周期短、频率高的特点,对于运输机来说,特别是在进近着陆、目标截获、空中加油这类需要精确跟踪的任务中,要求纵向短周期振荡必须受到重阻尼,减小飞行员的工作负荷,以保证飞行安全。飞行试验中,通常采用倍脉冲升降舵的方法来作为输入激励。频率和幅值是对激励输入的基本要求,受众多因素的影响,要求输入的频率和幅值也不相同。作为试飞员按照特定的频率和幅值完成这一激励的输入,充分激发纵向短周期振荡,对纵向短周期试飞来说至关重要,本文就如何根据飞机构型和飞行状态变化调整试飞员的输入动作,高质量地完成这一试验激励输入进行分析研究。
1 纵向短周期模态介绍
理论分析和飞行实践指出,对于大多数飞机,其纵向自由扰动运动由差别很大的2种运动模态组成[1],即短周期模态和长周期模态。当存在扰动时,首先,扰动后的最初一段时间内主要是迎角和俯仰角速度的变化,飞行速度的增量变化不大,因此,在讨论短周期运动传递函数的简化时,可近似认为飞行速度为常量,即增量ΔV=0,速度保持不变,运动是周期性的,阻尼比较大,且周期短,短周期模态是一个二阶响应,所以用频率和阻尼比来描述[2]。
纵向短周期响应特征方程:

式(1)中:ζsp为短周期阻尼比;ωnsp为短周期固有频率。
“短周期振荡”是飞机纵向小扰动运动模态,对应于纵向运动特征方程的一对大复根。该模态反映迎角受扰动而引起飞机绕重心的快速俯仰振荡的过程。对于短周期模态来说,其振荡周期短、频率高,驾驶员难以控制其振荡运动,对于民用运输机来说,要求纵向短周期振荡必须受到重阻尼。运输类飞机适航标准对此要求如下。
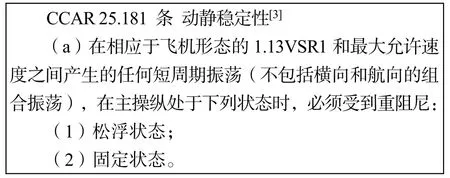
AC-25-7A对以上条款重阻尼的解释为“是在初始输入完成后,在两个周期内振荡幅值衰减到初始值的1/10”。
纵向短周期特性的试飞方法有3种[4],即单脉冲操纵升降舵、倍脉冲升降舵和阶跃升降舵。鉴于运输机自身特性,试飞过程中普遍使用倍脉冲升降舵作为激励输入,这样可以尽量抑制长周期模态。
在进行短周期试飞时,试验输入前,要在规定的试验状态配平飞机,并保持至少10 s稳定平飞,这样能排除空速变化对飞机姿态响应的影响,之后从驾驶杆的中立点为中心,迅速、柔和地推拉驾驶杆,最后回到中立点。作为一开环响应的试飞动作,试验输入的频率和幅值直接决定飞机响应和试验数据的有效性。
倍脉冲升降舵激励输入与飞机响应示意图如图1所示。
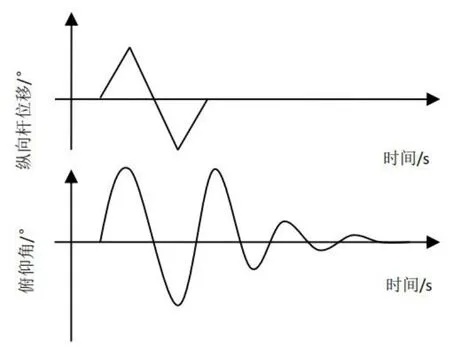
图1 倍脉冲升降舵的操纵与飞机响应
在动作完成后,通过观察与记录飞机的响应,试飞员可以对短周期的一些特征参数进行估算,用公式(2)对ζsp进行估算[5]:

式(2)中:n为飞机俯仰振荡周期个数。
在飞机纵向振荡过程中可以通过以下2种方式来计数振荡的周期数。方法一,以机内仪表为主,观察姿态仪上飞机图标俯仰运动周期数;方法二,以机外为主,观察机头相对于天地线或其他外界参照物的振荡运动周期数。
在计数俯仰振荡周期数的过程中,可以使用秒表记录俯仰振荡一个周期所用时间,用公式(3)估算ωsp:

式(3)中:T为短周期时长。
在估算出纵向短周期的阻尼比和频率后,使用公式(4)计算纵向短周期固有频率:

2 影响操纵激励输入的因素
纵向短周期的飞行试验通常会在包线范围内所有典型状态点上进行,飞行参数的改变必然会引起飞机自身操纵性和稳定性的变化,其中包括飞机纵向短周期特性,同时也影响试飞员的试验激励输入动作,所以试飞员明晰飞机状态改变对纵向短周期特征参数的影响,以及如何相应地调整试验激励输入,对于纵向短周期试验十分重要。
2.1 影响输入频率的因素
作为纵向短周期试验的关键因素之一,如果激励输入的频率太高,将不会充分激发飞机运动,太低又会导致飞机空速变化过大,偏离试验点,影响数据有效性,只有当试验输入频率与飞机固有短周期频率一致时,才会充分激发纵向短周期振荡。在纵向短周期试飞前,试飞员通常采用正弦扫频的方法来感受短周期振荡特性,并尽量使试验输入频率与短周期固有频率一致,如图2所示。通过确定迎角或者俯仰角的振荡周期就可以确定短周期模态的频率。
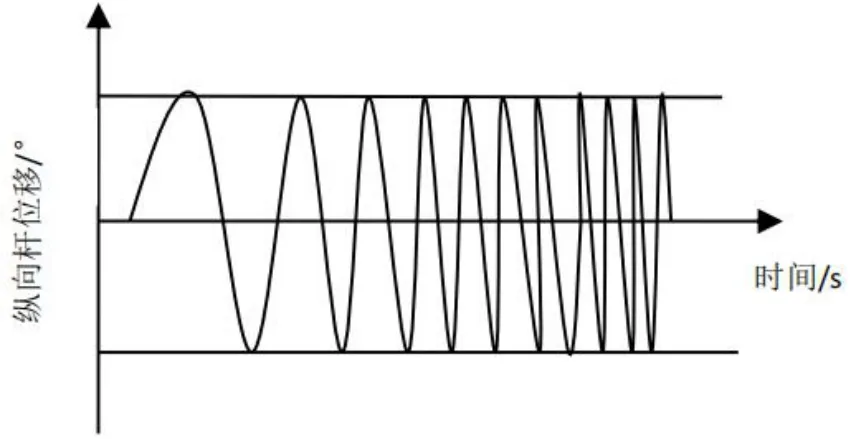
图2 纵向正弦扫频示意图
运输类飞机通常具有很高的纵向静稳定性,所以Cmα将主导ωnsp的表达式[6],则有下列简化关系式:
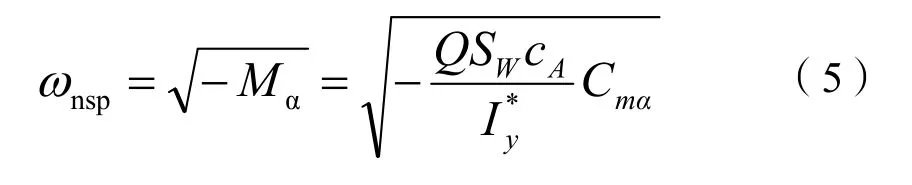
式(5)中:ωnsp为短周期固有频率;Cmα为俯仰静稳定性导数。
由上式可知,短周期固有频率ωnsp将依赖于大气密度ρ和飞行速度V,也就是说,固有频率ωnsp与飞机动压Q的平方根成正比,即:

2.1.1 飞行高度与空速对输入频率的影响
纵向短周期的试飞高度需包含高空和低空,试飞速度需要在高速、低速进行试飞。在速度和高度状态改变时,其对固有短周期频率的ωnsp的影响[4],可由公式(5)得出下列结论:①同一高度下,高速飞行要比低速飞行时的ωnsp大,所以相比之下高速飞行时,激励输入动作应快一些,完成试验输入的时间要短;②同一Ma数、不同飞行高度,由于低空空气密度大,动压Q比高空要大,所以低空飞行时固有短周期频率ωnsp要大,完成试验输入时间要短;③当马赫数Ma增大时,相比与飞行速度V的增大对短周期固有频率ωnsp的影响,ωnsp增大的更多,因为随着马赫数Ma的增大,直接导致气动焦点后移,使得纵向静稳定性导数|Cmα|增大,从而导致短周期固有频率ωnsp随之增大。所以大马赫数飞行时,完成试验输入的时间更短一些。
2.1.2 质量、重心对激励输入频率的影响
当改变飞机重心后,短周期固有频率也会发生变化。重心主要影响静稳定性导数,重心后移时,纵向定速静稳定性导数|Cmα|减小[7],由公式(5)可知,ωnsp减小,所以在后重心构型下,试验输入频率减小,试飞员完成输入动作的时间需相应延长,反之亦然。
2.2 影响输入幅值的因素
倍脉冲输入的幅值不易控制,推拉杆幅值的对称性也很难掌握,此外,由于在推拉杆过程中飞机姿态快速变化,会直接影响到试飞员的输入动作。
2.2.1 操纵系统机械特性的影响
在输入过程中,感受杆力的大小是试飞员控制输入幅值的主要方法之一,飞机操纵系统机械特性中的人感特性直接影响着试飞员的操纵感受,尤其是对于非电传操纵系统的飞机来说,其中的起动力、摩擦力、自由行程、间隙、回中和振荡等特性差异,可能会对试飞员的操纵感受带来较为明显的影响,所以试飞员必须熟悉飞机操纵系统的机械特性。
理想的操纵系统完全是线性的,没有起动力和摩擦力,其Fes与δes曲线如图3(a)所示。实际操纵系统的机械特性通常是既有摩擦力又有起动力[8],其Fes与δes曲线如图3(b)所示,飞行试验前,试飞员可以着重感受操纵系统的摩擦力和起动力。
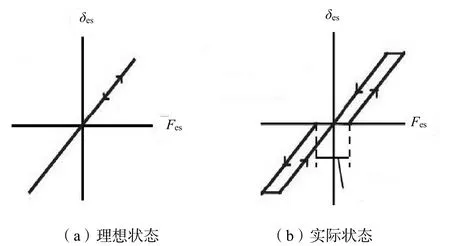
图3 操纵系统杆力与舵偏曲线
摩擦力是用来克服操纵联动装置滑动、滚动或任何其他形式的动摩擦力所需的杆力,摩擦力是机械操纵装置的固有属性,不可避免,摩擦力过大时,操纵系统的特征是:回中性差,整个操纵偏转范围内的操纵感觉不精确,需要频繁地重新配平。
起动力是指操纵驾驶杆行程离开配平位置所需克服的初始阻力。起动力通常要比摩擦力大,这样才能克服摩擦力使驾驶杆完全回中,也有助于飞行员感觉到驾驶杆的中立位置点。
对于机械传动的操纵系统来说,激励输入过程中,起动力和摩擦力将对试飞员的操纵感受与动作的准确性带来影响,尤其是在动作顶点和中立点这些较为特殊位置。
2.2.2 飞行员坐姿对输入幅值的影响
在进行输入时,飞行员的坐姿是一个重要且容易被忽视的因素。在缺乏操纵行程指示系统的飞机中,试飞员常以自己肘部的弯曲程度来感受和判断推拉杆的行程,而大多数情况下,在动作过程中,试飞员的身体都会不由自主地前后晃动,此时相同的肘部弯曲度必然会产生不同的操纵行程。
在动作过程中,试飞员需要用腰部力量来稳定上身,在做推杆动作时,试飞员的后背紧靠座椅,肩部向后移动的空间非常有限,移动量主要是来自座椅靠背填充物的压缩量,所以此时肩部位置的移动量很小,对推杆形成造成的影响可以忽略;而在做拉杆动作时,尤其是对于操纵力较大的操纵系统来说,此时腰部力量难以充分稳定肩部,通常会造成动作时上身前倾,将导致相同的肘部弯曲度下,拉杆行程较小,而在动作过程中叠加飞机运动,试飞员很难察觉自己的肩部前移,给试飞员造成拉杆行程到位的错觉,此时再以肘部弯曲度作为参照物极易造成推拉行程输入不一致。
3 对试验输入动作具体过程的优化
基于以上分析研究,本文对实施试验输入的具体过程作出总结与优化:①动作前试飞员应调整座椅位置及坐姿,在调整过程中,本文建议的参考如下原则,推杆至极限位置时,肘部需要仍具有一定的弯曲度,确保肘关节不被伸直锁死;拉杆时背部挺直并稍微向后倾斜,以便能更好地利用腰背力量稳定肩部,并且双脚能够均衡用力抵住方向舵,以便确保在拉杆时臀部不会向前滑动。②在实施倍脉冲前,用纵向扫频的方法来熟悉飞机纵向跟随驾驶盘的运动特性,当某一频率上的操纵输入使得飞机俯仰运动产生“荡秋千”式的运动时,试飞员应牢记在此频率的操纵感受,此频率十分接近飞机固有频率,后期试验输入时的操纵频率应该与此频率基本一致[9]。③试验前将飞机配平到规定的飞行状态,松开驾驶杆的情况下,飞机的高度、速度、航向、姿态等状态参数应保持恒定或变化量在要求范围内。④根据飞机当前构型、速度限制、高度限制情况来确定推拉杆的先后顺序,推杆与拉杆的行程要一致,推拉杆动作要平滑柔和,避免在操纵顶点受飞机姿态变化影响动作出现短暂停顿。⑤动作完成后手要松开驾驶盘,让其自由响应,但要始终跟随驾驶盘运动,尤其重心接近飞机中性点,防止出现发散的短周期运动,但注意飞机正常响应过程中不要触碰到驾驶盘。飞机响应过程中,注意感受飞机姿态变化的最高点和最低点,并记下飞机响应的周期数,用经验公式来估算飞机的短周期频率和阻尼比[10]。
4 结束语
倍脉冲升降舵是最常用的激励飞机短周期运动的方法,试验动作看似简单,但对试飞员有很高的要求,需要试飞员在动作前综合考虑飞机的质量、重心、构型、飞行高度、操纵系统的机械特性等一系列因素,结合具体的飞行过程再不断调整、细化、提炼试飞动作,力争空中能够快速、准确获得试飞数据,提高飞行试验效率。
猜你喜欢
铁军·少年国防(2023年11期)2024-01-09 15:53:59
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:38
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:12
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:04
锻压装备与制造技术(2021年3期)2021-08-13 08:39:54
中学生数理化·八年级物理人教版(2021年3期)2021-07-22 03:19:00
数学大王·低年级(2020年4期)2020-04-20 10:59:47
军营文化天地(2017年8期)2017-08-31 18:38:22
铁道机车车辆(2016年3期)2016-10-25 09:02:43
创新作文(1-2年级)(2016年4期)2016-05-14 19:33:03