
机载航测实时处理系统设计及实现
2022-05-23 06:22贺少帅杨德芳杨晓英李文帅
地理信息世界 2022年1期
贺少帅,杨德芳,杨晓英,李文帅
1. 中国航天空气动力技术研究院,北京 100074;
2. 青海省自然资源遥感中心,青海 西宁 810000
0 引 言
近年来,无人机航空摄影已成为高效获取突发事件现场信息的主要手段,尤以针对我国发生的地震、泥石流、山体滑坡、洪涝等自然灾害的应急测绘领域的应用成效最为显著[1-5]。然而在面向国家和地方重特大突发事件中,现有的应急装备保障体系难以满足灾情现场指挥决策的地理信息保障需求,导致无法在第一时间获取震区受灾程度、灾害分布状况等灾情信息,科学化开展指挥决策、应急救援、灾情评估和灾后重建工作受到很大局限[6-8]。因此,本文提出基于中大型无人机一体化,集成航测相机、轻小型SAR、定位定姿系统(POS)以及集成座架,实现应急测绘第一张图的目标,并在四川广元机场验证机上实时处理成图技术的可行性和有效性,为无人机航测应急[9-10]相关领域的深入推广使用提供可靠的技术支撑和成果保障。
1 任务载荷集成
航测相机、轻小型SAR及光电吊舱多任务载荷一体化集成,再加上地面指挥控制系统,形成载荷数据实时获取、实时传输、实时处理成图系统,可将突发事件的应急成果第一时间传输至地方和国家应急中心,为领导决策提供保障。成图系统功能如下:
1)全天候地理信息快速获取。中大型无人机在快速响应应急任务指令时,搭载适宜任务载荷(航测相机、轻小型SAR及光电吊舱)按照规划的航线完成灾区或作业区的地理信息快速获取,特别是在气象环境恶劣(如水雾、较厚的云层、雾霾、小雨等)的情况下可充分发挥轻小型SAR的全天候作业优势,获取高分辨率全极化伪彩色图像,为应急救灾提供数据及成果支撑。
2)任务区地理信息协同获取。根据任务需求,制定应急任务航线规划。中大型无人机搭载航测相机、轻小型SAR以及光电吊舱实现多源数据的实时同步获取,提高作业效率,丰富成果信息,尤其是通过航测相机获取目标地区的高分辨率影像数据,同时使用轻小型SAR观测航测相机影像中的不清晰区域,从而保障目标区域数据的完整性和有效性,做到数据高精度匹配、多源异构数据实时融合处理及应用。
3)载荷数据实时动态传输。中大型无人机飞抵任务区实时获取多源数据,与此同时,使用链路检测模式实时动态传输多任务载荷成果至地面指挥控制站加以显示,保障应急任务数据的时效性,为灾区的正确及时评估及科学合理的应急救援提供可靠的数据保障。
4)载荷数据快速处理。无人机响应应急任务指令,执行任务,快速获取灾区现场信息,并通过数据处理集成系统,快速制作灾区影像图第一手资料,为应急决策提供信息保障。
1.1 载荷集成设计
任务载荷分系统的关键测量设备包括航测相机、组合惯导IMU,二者刚性固联于集成座架上,以保证运动补偿的有效性。IMU和集成座架的XYZ三轴依次相互平行于正前方、水平右侧、垂直向上(三轴互相垂直,且满足右手定则),安装误差小于2°。为实现昼夜连续作业,克服光线、湿度对航摄作业造成的影响,任务载荷分系统采用一体化集成安装方式。航测相机镜头和SAR的收发天线通过机械结构安装于集成座架的滑环之下,组合惯导的IMU固联于集成座架的滑环之上,形成所有测量设备的一体化、刚性捷联安装(图1)。

图1 一体化集成观测系统内部设备安装方式示意图Fig.1 Diagram of internal equipment installation of integrated observation system
1.2 集成吊舱设计
集成吊舱与集成座架的连接采用座式安装于载荷舱内部底板上,部分置于舱内,部分置于舱外,挂接可靠(图2)。
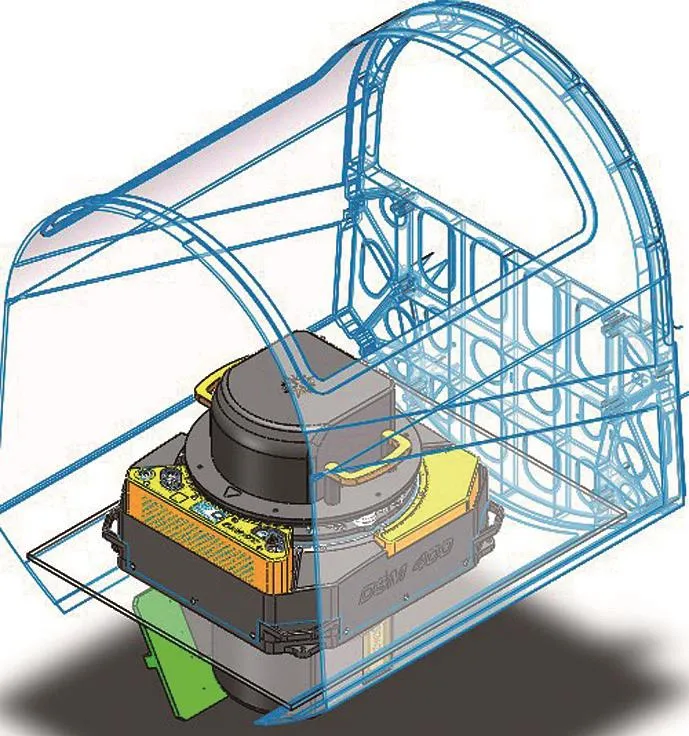
图2 座式载荷结构设计图Fig.2 Design of pedestal payload structure
1.3 供电设计
任务载荷分系统由中大型无人机供电。通过电源转接线分出4路供给航测相机、轻小型SAR、组合惯导和集成座架,且具有短路保护功能,可在任务载荷分系统发生意外故障,出现短路时主动切断无人机对一体化集成载荷分系统的供电,保护无人机飞行安全。
1.4 智能化控制接口
中大型无人机对载荷接口包括供电接口及控制接口。通过航测控制器实现与无人机间的数据传输,通过异步422接口接收数据链传输的控制指令,实现地面指控站对一体化集成载荷分系统工作状态的实时监控;通过同步422接口向数据链发送实时采集的光学、SAR影像和位姿信息,实现地面对载荷分系统采集数据实时处理,满足应急环境下实时采集、实时处理的要求;实时传输,由同步422链路进行传输,紧急情况下航测控制器可将采集的数据通过卫通链路实时下传。
一体化集成载荷分系统(图3)由组合惯导通过RS232接口向航测控制器发送实时采集的位置和姿态数据,航测控制器负责完成原始位姿数据的实时存储和解析后,再把位姿数据发送给集成座架和SAR解算器;集成座架接收到位姿数据后,自动完成姿态的调整,保证一体化集成载荷分系统处于相对平稳的工作状态,从而避免因无人机抖动而造成航摄影像及SAR影像出现质量问题。
中职生年龄一般为15~17岁,不仅有青春期中学生的普遍特征,还有一些自身所特有的心理特点。中职生基本上是中考失败的学生,都有考试失败、家人责骂、老师不重视以及认为中职学校学生低人一等的感受,他们频繁出现的课堂问题行为,与其自卑、焦虑、紧张、敏感和自我保护心理是分不开的。有的中职生为了引起老师和同学的关注,故意扰乱课堂秩序;有的学生则因多次受到老师责骂而心怀怨恨;一些学生无法静下心来学习。这样便形成了中职生比较特殊且严重的课堂问题行为。此外,厌学情绪也是不容忽视的原因。

图3 一体化集成载荷分系统与无人机接口图Fig.3 Interface diagram of integrated payload subsystem and UAV
2 机上实时处理成图
由于航测相机获取的原始数据(RAW格式)位阶为16bit,为了减小数据量和存储空间,需要对RAW格式进行压缩处理,如将一张20000万像素光学面阵传感器RAW格式影像经过IIQ无损压缩至200MB。为了便于影像的实时传输,经过解压缩和重采样等机上实时处理流程形成第一张成果图(图4)。

图4 机上实时处理流程示意图Fig.4 Schematic diagram of real-time processing flow on airborne aerial camera
航测相机主要是通过多功能轻小型化高度集成的嵌入式低功耗系统自主编码实现图像机上实时处理,完成处理的图像带有地理坐标。机上实时处理系统是独立的系统,主要功能包括:接收POS数据、曝光成像、存储、实时拼接处理。这既是机上实时处理的难点也是亮点,实现过程包括双镜头影像、大幅面影像格式解析,多线程并行影像处理,校正、优化、重采样及压缩实时拼接并下传,其中多线程并行处理主要是为了提高效率,校正包括:
1)传感器校正。即将影像中每个像元的光照反应值进行调整,使其与光学面阵传感器标定曲线一致,保证像元的一致性。
2)传感器温度校正。信噪比随温度升高而急剧降低。因此在温度急剧变化时,需要重新定义黑电平,降低传感器的信噪比。
3)影像处理。在飞行过程中,机上实时处理系统可对原始位图(16bit)进行处理,输出原分辨率和降低分辨率的影像,并对其进行色彩增强处理,以提高雾霾情况下影像的清晰度和辨识度。
2.1 在线实时拼接
中大型无人机飞行平台集成的航测相机在完成灾情现场信息获取的同时,通过集成载荷控制器完成双镜头的拼接处理成图(图5),无明显拼接缝,效果良好。

图5 iXU-RS1900相机两镜头未拼接影像(左)和拼接影像(右)Fig.5 Comparison of unstitched image (left) and stitched image(right) between two lenses of IXU-RS1900 camera
2.2 在线偏色调整
中大型无人机飞行平台在飞抵灾情现场或任务区时,搭载的一体化集成航测相机在获取现场信息时,由于成像条件导致获取影像数据不符合成图要求,因此需要对其进行实时的匀光匀色处理(图6),匀光匀色后较之前效果明显,符合成图质量要求。

图6 影像整体偏紫色调整前(左)后(右)对比Fig.6 Comparison before (left) and after (right) adjustment for the purple of the overall image
2.3 在线去雾霾
在中大型无人机飞抵任务区时,难免会遇到雾霾,因此需要提前设计不同的去雾霾算法或模型,使得成图质量符合技术要求(图7)。

图7 影像去除雾霾前(左)后(右)对比Fig.7 Comparison of images before (left) and after (right)haze removal
2.4 在线暗色调整
一体化集成的航测相机在任务区或灾情现场获取信息的同时,或多或少由于光线不足或曝光设计值不够导致影像数据过暗,因此需要设计不同的图像增强模型进行增强处理(图8)。过暗影像调整后较调整前效果明显清晰,符合成图要求。

图8 过暗影像调整前(左)后(右)对比Fig.8 Comparison before (left) and after (right) adjustment of the shadow image
2.5 快拼图效果评价
光学遥感影像智能测绘是基于高分辨率三维地理信息数据,针对影像快速处理的一项新技术。这项新技术立足于面向应急测绘的影像获取、管理、处理,可将地理空间数据与影像数据有效集成,提供三维空间位置与影像相结合的应用服务。影像成果与三维场景融合效果如图9所示。从整体来看,经过处理的机场附近区域现场图效果较好,未出现拉花、变形现象。从细节上看处理后的现场影像图与三维地理信息平台底图(天地图)位置对应关系较好。

图9 航测相机第一张图与三维平台自动叠加后的整体效果(左)和放大后的细节效果(右)Fig.9 Automatic overlay effect (left) and the enlarged detail effect (right) of the first image taken by the aerial camera and the 3D platform
利用三维地理信息平台底图(天地图)中的距离量测工具从影像图中均匀选取20个地物特征点与三维底图进行距离量测,从表1可以看出最大误差为7.9 m,最小误差4.8 m,中误差6.065 m。

表1 航测相机影像图点位误差Tab.1 Point position error of aerial camera image
综上所述,无人机航测相机实时处理形成的第一张成果图与三维GIS平台叠加效果良好,满足国家应急测绘成图技术要求,可为国家和地方重特大突发事件应急决策提供可靠的成果保障。
3 结 论
机载航测实时处理系统基于中大型无人机标准化接口,一体化集成航测相机、轻小型SAR以及光电吊舱,根据任务指令,结合应急预案,飞抵任务区,完成灾情现场信息快速获取、实时传输及高效处理。尤其是融合基于高精度POS的机上实时处理成图技术,实现了第一时间获取灾情现场第一张图的应急测绘目标。首次在四川广元机场多架次验证,在国内多个机场的成功应用说明,机载航测实时处理系统可规模化应用,可在无人机应急相关领域等,为国家和地方突发性事件应急救灾提供高时效保障和技术支撑。
猜你喜欢
江苏安全生产(2022年8期)2022-11-01
现代世界警察(2019年2期)2019-09-10
现代世界警察(2018年7期)2018-09-10
现代世界警察(2018年8期)2018-09-10
环球时报(2018-07-11)2018-07-11
地震研究(2014年4期)2014-02-27
